Изобретение относится к транспортным средствам и может быть использовано в двигательных (тяговых) системах для создания тяги объектов, в частности космических объектов в пространстве.
Известен способ создания тяги, включающий в себя отбрасывание с некоторой скоростью части массы объекта [Исследование ракетных двигателей на жидком топливе // Пер. с англ. Под ред. В.А.Ильинского / М.: Мир, 1964, с.355].
Недостатками этого способа являются большой расход энергии, требуемый для его осуществления, обусловленный малым коэффициентом полезного двигателя (КПД) тепловых движителей, существенная неэкологичность процесса, связанная с необходимостью выброса в окружающую среду продуктов сгорания рабочего вещества движителя объекта. Необходимость наличия запаса топлива для осуществления способа создания тяги отрицательно сказывается на массовых характеристиках объекта, для которого используется способ.
Известен способ создания тяги, включающий создание на объекте магнитного поля и перемещение в этом поле тел, механически связанных с объектом [Астронавтика и ракетодинамика. Экспресс-информация // ВИНИТИ, М., 1981, №39, с.22-24]. Этот способ основан на принципе электромагнитного ускорения внешней среды с дипольной микроструктурой без ее ионизации и может использоваться для создания тяг как на Земле, так и в космосе.
Известен способ создания тяги [Бауров Ю.А., Огарков В.М. Способ перемещения объекта в пространстве // Патент РФ №2082900, 27.06.97 г.], включающий создание на объекте магнитного поля и перемещение в этом поле тел, механически связанных с объектом, магнитное поле на объекте создают с векторным потенциалом, ориентированным под углом 90-270° к космологическому векторному потенциалу [Бауров Ю.А., Огарков В.М. Способ перемещения объекта в пространстве // Патент РФ №2082900, 27.06.97 г.; Бауров Ю.А. Структура физического пространства и новый способ получения энергии (теория, эксперимент, прикладные вопросы). М.: Кречет, 1998, с.62; Baurov Yu.A. «On the structure of physical vacuum and a new interaction in Nature (Theory, Experiment and Applications)». Nova Science, NY, 2000, 217 р.; Baurov Yu.A. Global Anisotropy of Physical Space. Experimental and Theoretical Basis. Nova Science, NY, 2004, p3; Baurov Yu.A. «Structure of physical space and nature of electromagnetic field» in coll. Work. PHOTON: Old problems in light of new ideas, Nova Science, NY, 2000, p.259-267; Baurov Yu.A. «Structure of physical space and new interaction in nature (theory and experiment)» in Proceedings of conf. Lorentz group, CPT and Neutrinos, World Scientific, 2000, p.342-352; Baurov Yu.A. «Structure of Physical Space and Nature of de Broglie Waves (Theory and Experiment)». Jornal "Annales de Fondation de Broglie" "Contemporary Electrodynamics", 2002, p.443; Бауров Ю.А. Новый квантовый информационный канал и природа гравитации. КОСМОС*ВРЕМЯ*ЭНЕРГИЯ. Сб. статей, посвященных 100-летию Д. Д. Иваненко. Изд. "Белка", 2004 г., с.263; Бауров Ю.А., Огарков В.М. Способ перемещения объекта в пространстве и устройство для его осуществления. Патент РФ №2023203, 15.11.94 г.; Бауров Ю.А. и др. Способ получения тепловой энергии и установка для его осуществления. Патент РФ №2251629, 10.05.2005 г.; Бауров Ю.А., Беда Г.А., Даниленко И.П., Огарков В.М. Способ получения энергии и устройство для его осуществления. Патент РФ №2147696, 20.04.00 г.], а перемещение тел осуществляют путем придания им непрерывного вращения с регулируемой скоростью вокруг осей перпендикулярных плоскостям, в которых расположены векторы векторного потенциала магнитного поля объекта и космологического векторного потенциала, причем тела вводят в область пониженных значений потенциала, равного сумме указанных векторных потенциалов.
В результате вследствие непрерывного движения (вращения) перемещаемых тел движущая сила возрастает, эффективность воздействия с ее стороны на перемещаемый объект увеличивается.
К недостаткам этого способа можно отнести следующее: ограниченную область применения, связанную с наличием выбранного направления в пространстве, обусловленного существованием космологического векторного потенциала Аг, необходимость наличия магнитного поля на борту объекта.
Известен способ создания тяги в космическом пространстве [Бауров Ю.А., Бауров А.Ю. Способ перемещения объекта в космическом пространстве. Патент РФ №2338669, 25.01.2007 г.] в окрестности планеты или звезды, включающий перемещение тел внутри объекта посредством крепления их на роторе, при этом на объекте размещают механически связанные с объектом два ротора, один из которых выполнен в виде непрерывного кольца, а второй - основной ротор с дополнительным массивным телом, расположенным на его периферии и с равным по величине, но противоположно направленным гироскопическим моментом по отношению к первому ротору, увеличивают угловую скорость вращения роторов до величины максимального линейного ускорения объекта и фиксируют эту угловую скорость с помощью обратной связи по величине линейного ускорения.
Рассмотренное последним техническое решение (Патент РФ №2338669, 25.01.2007 г.) является наиболее близким аналогом к заявляемому предложению и выбрано в качестве прототипа для заявленного способа и устройства.
К недостаткам этого способа можно отнести следующее: значительные энергозатраты, связанные с наличием на борту космического объекта ротора с гироскопическим моментом, компенсирующим гироскопический момент основного ротора с дополнительным массивным телом, расположенным на его периферии, которые необходимы для его вращения, невозможность полезно использовать пространство, занимаемое системой раскрутки роторов, а также трудности создания системы управления движением роторов для получения значительной величины тяги в течение продолжительного времени.
Задачей, на решение которой направлено заявленное изобретение, является уменьшение энергозатрат, связанных с наличием на борту космического объекта ротора с гироскопическим моментом, компенсирующим гироскопический момент основного ротора с дополнительным массивным телом, расположенным на его периферии, которые необходимы для его вращения, увеличение полезного пространства, которое может быть занято жилым отсеком, полезной нагрузкой, системами управления, а также упрощение системы управления движением роторов для получения значительной величины тяги в течение продолжительного времени.
Технические результаты, которые обеспечиваются изобретениями, заключаются в том, что предлагается способ создания тяги, устройство для его осуществления и средство перемещения объекта в пространстве, не связанные с наличием на борту роторов с гироскопическим моментом, компенсирующим гироскопический момент основных роторов с дополнительными массивными телами, расширяются области применения (получение тяги как в вертикальном, так и горизонтальном направлениях), упрощается система управления движением роторов для получения значительной величины тяги в течение продолжительного времени, а также увеличивается эффективное использование на борту объекта его полезного объема.
Указанные технические результаты достигаются тем, что в известное техническое решение, выбранное прототипом, - способ создания тяги, заключающийся во вращении расположенного на объекте ротора, который содержит дополнительное массивное тело, размещенное на его периферии, на объекте дополнительно располагают 2N-1, где N=1, 2, 3, …, роторов, каждый ротор выполнен с дополнительным массивным телом, размещенным на его периферии, 2N роторов образуют N пар роторов, также на объекте располагают М разгонно-тормозных блоков, жестко закрепленных на корпусе объекта, каждый ротор сцеплен с Ф, где Ф=3, 4, 5, …, разгонно-тормозных блоков, M=2N×Ф; раскручивают в противоположных направлениях 2 ротора по крайней мере одной из N пар роторов, доводят величину угловой скорости ω вращения каждого ротора при одном его обороте до значения ωi, где i=1, 2, 3, …2N - номер ротора, осуществляют торможение i-го ротора до конечного минимально возможного значения его угловой скорости ωкон.i, причем обеспечивают старт указанного дополнительного массивного тела на роторе с небольшой скоростью, быстрый набор телом скорости в течение оборота при достижении ротором заданной угловой скорости ωзад.i, определяемой величиной требуемого ускорения объекта при одном его обороте
aтреб=P·ωзад.i,
где Р - размерный коэффициент, эмпирически определяемый конструкцией объекта, и предельно быстрый сброс скорости тела в месте его расположения оборотом раньше, при этом располагают указанные пары роторов на объекте в зависимости от требуемого направления силы тяги и осуществляют Li оборотов каждого i-го ротора, где Li определяют по величине требуемого ускорения объекта за данные Li оборотов.
В частных случаях и в конкретных формах выполнения изобретение характеризуется следующими признаками:
- размещают роторы в η-й, где η=1, 2, …N, паре роторов в одной плоскости;
- размещают роторы в η-й, где η=1, 2, …N, паре роторов в параллельных плоскостях;
- обеспечивают в η-й, где η=1, 2, 3…N, паре нулевой гироскопический момент;
- обеспечивают в η, где η=1, 2, 3…N, пар роторов нулевой по величине гироскопический момент;
- тормозят дополнительное массивное тело i-го, где i=1, 2, 3, …2N, ротора в месте расположения разгонно-тормозного блока;
- обеспечивают для i-го, где i=1, 2, 3, …2N, ротора конечное значение его угловой скорости ωкон.i, равное нулю;
- выполняют дополнительное массивное тело из вещества с удельным весом более 8 г/см3;
- выполняют дополнительное массивное тело массой более 20% массы ротора;
- располагают на объекте две пары роторов, каждый ротор соединен с четырьмя разгонно-тормозными блоками, расположенными с азимутальной симметрией относительно ротора, при этом разгонно-тормозные блоки в каждой паре роторов размещают на диаметрально-противоположных направлениях и на равных углах между собой;
- выполняют роторы в виде колец.
Сущность заявленного предложения заключается в том, что при разгоне и торможении дополнительных массивных тел соблюдают специальный вид графика разгона и торможения. Дополнительное массивное тело, закрепленное на роторе, должно стартовать с небольшой скоростью, быстро ее набрать в течение оборота и предельно быстро ее сбросить в месте своего расположения с минимальной скоростью оборотом раньше.
На фиг.1 приведен график, иллюстрирующий характерное изменение угловой скорости ω(t) при одном обороте дополнительного массивного тела вместе с ротором при торможении дополнительного массивного тела до угловой скорости, равной нулю, в месте расположения дополнительного массивного тела оборотом ранее.
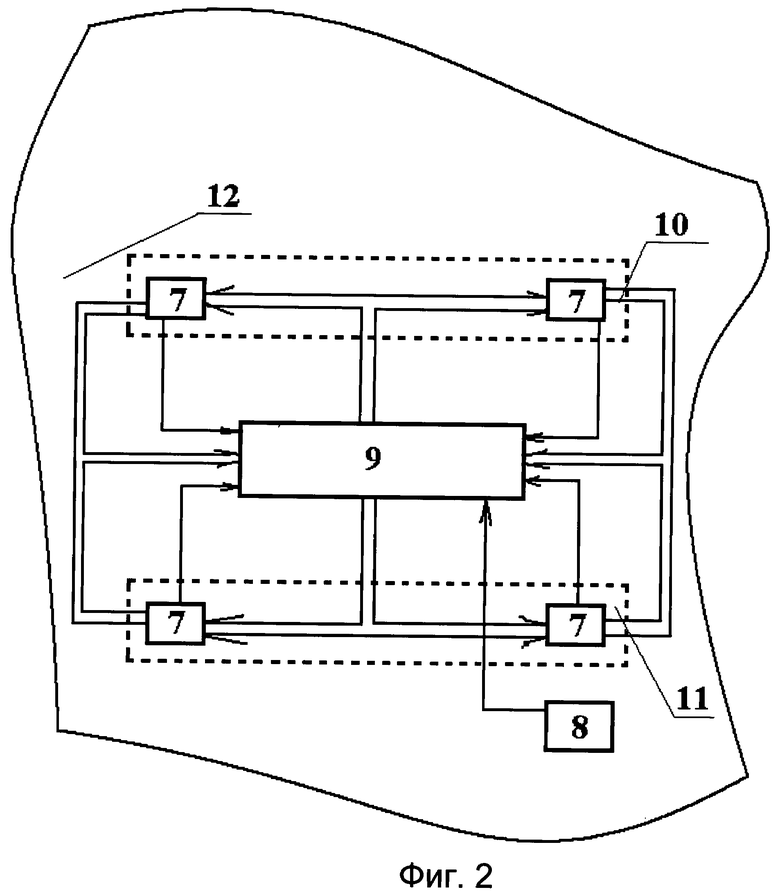
На фиг.2 представлена структурная схема устройства создания тяги.
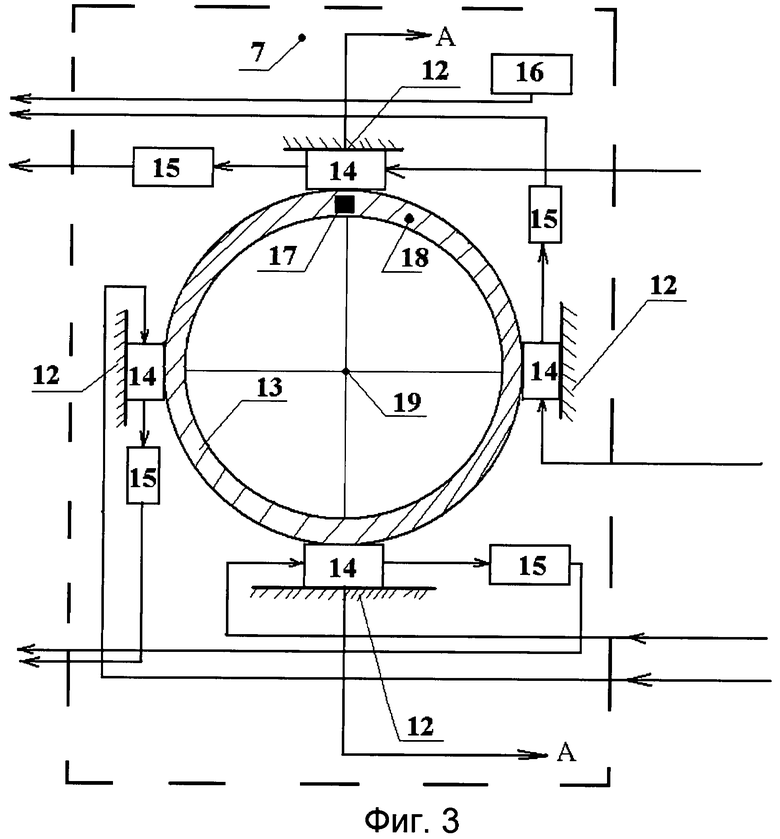
На фиг.3 представлена структурная схема роторного модуля для случая, когда количество измерителей параметров вращения ротора 15 равно количеству разгонно-тормозных блоков 14 (К=М=4).
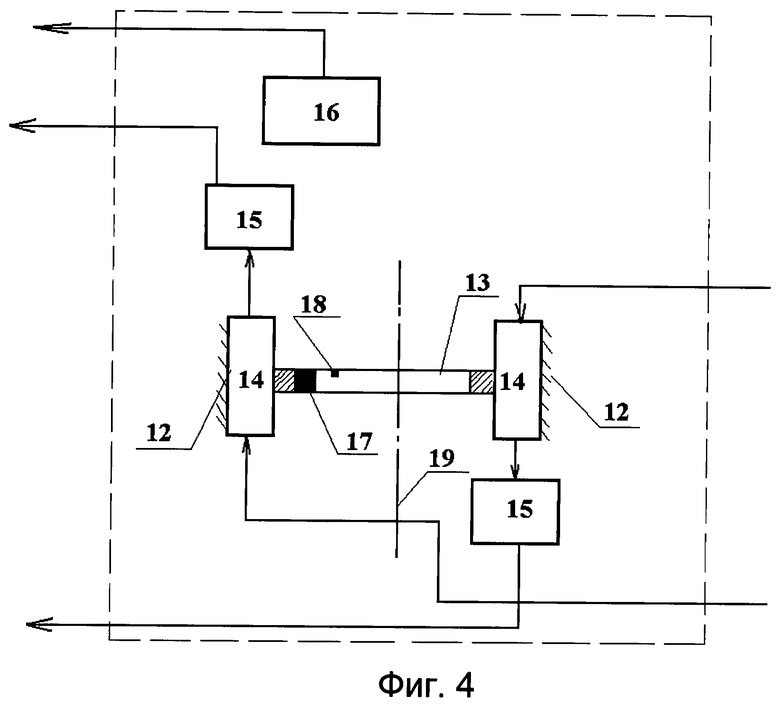
На фиг.4 показан схематический вид сечения А-А по фиг.3 роторного модуля и блоков, относящихся к нему.
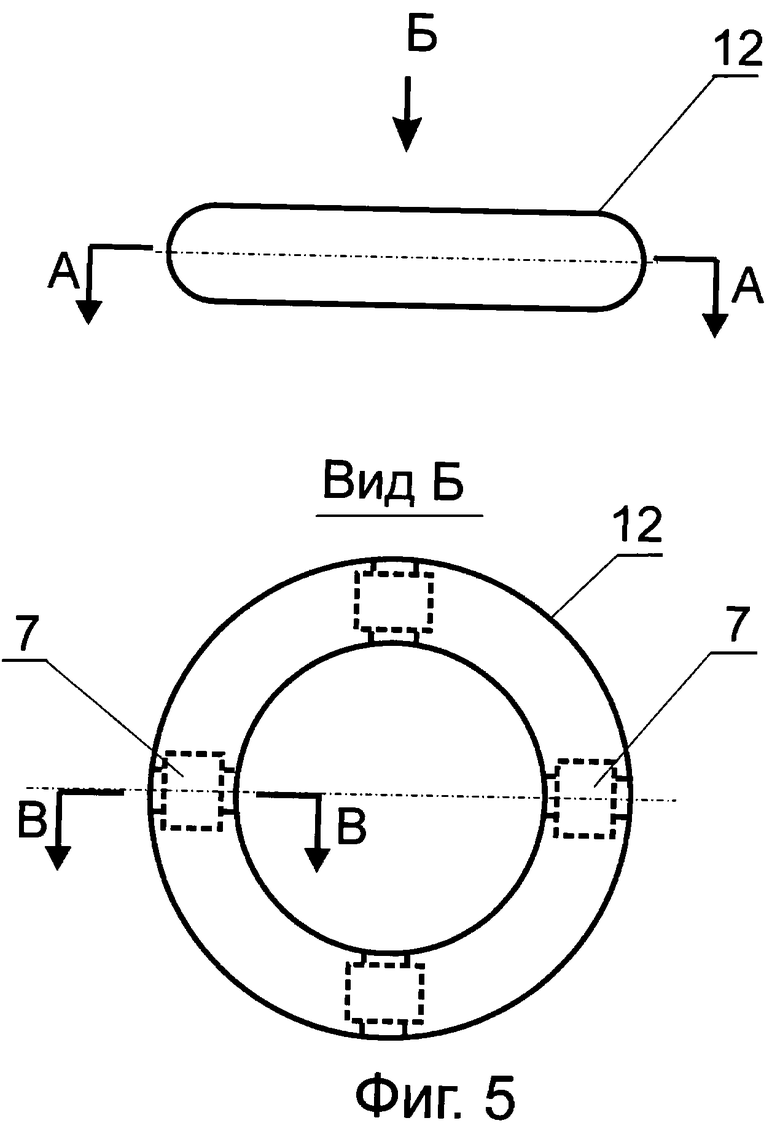
На фиг.5 представлен схематический внешний вид устройства создания тяги для средства перемещения для случая N=2 (п.20 формулы изобретения).
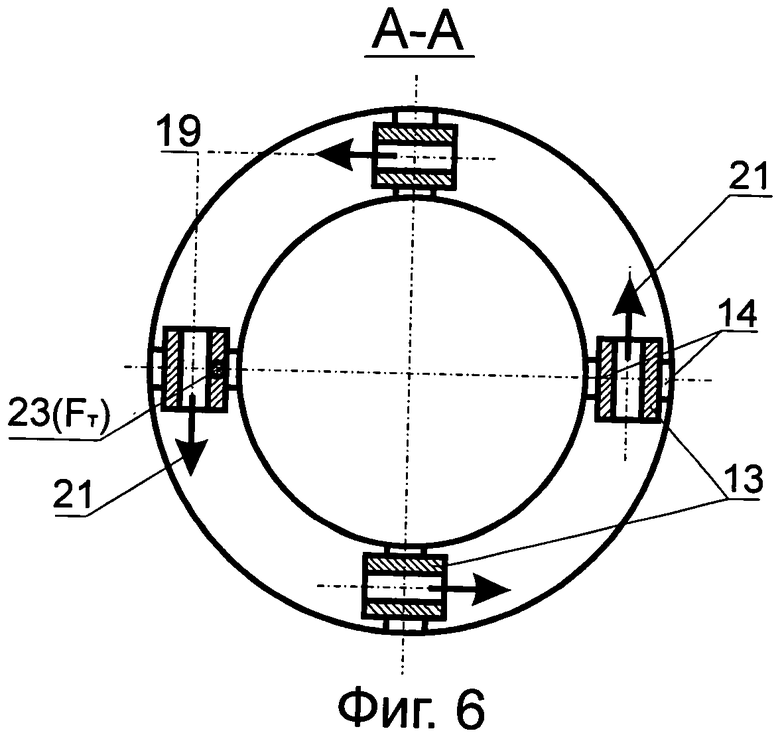
На фиг.6. показан схематический вид сечения А-А по фиг.5 устройства создания тяги для средства перемещения для случая N=2.
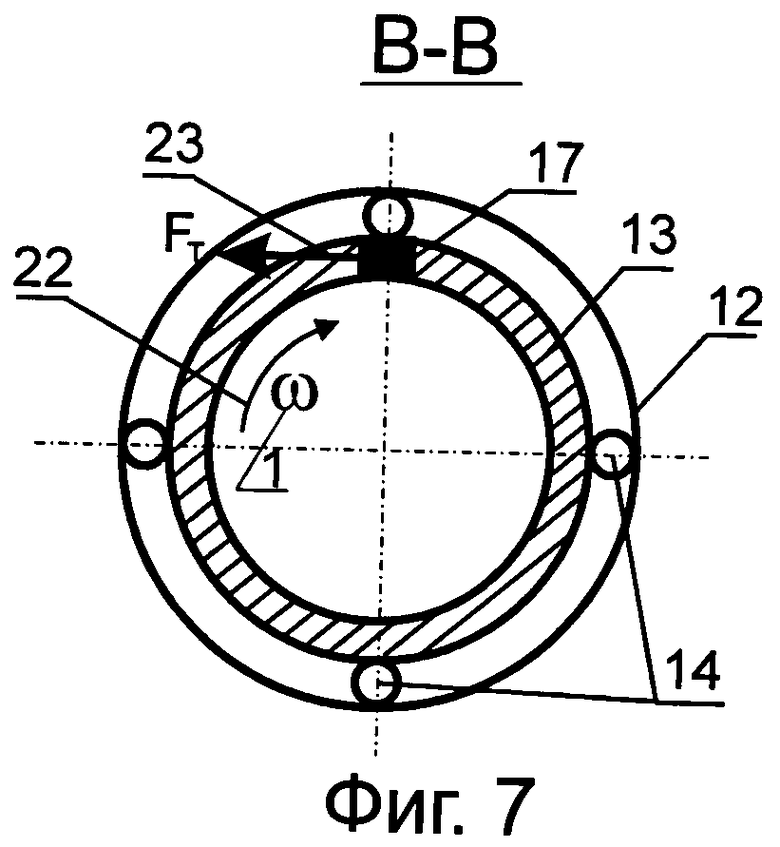
На фиг.7 показан схематический вид сечения В-В по фиг.5 устройства создания тяги для средства перемещения для случая N=2.
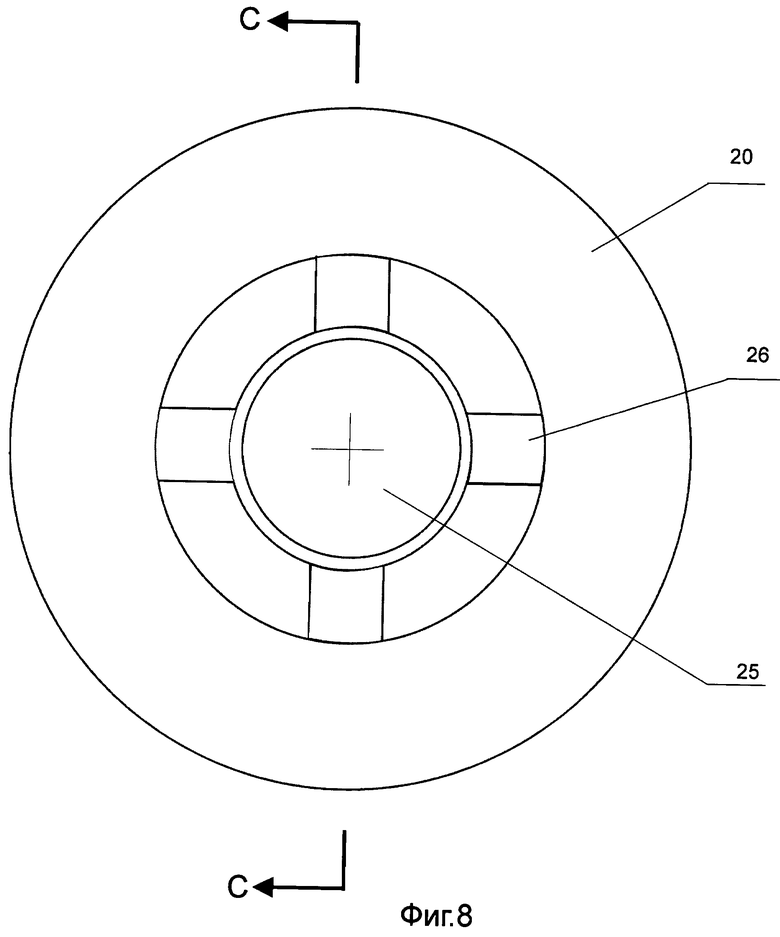
На фиг.8 представлен схематический вид средства перемещения.
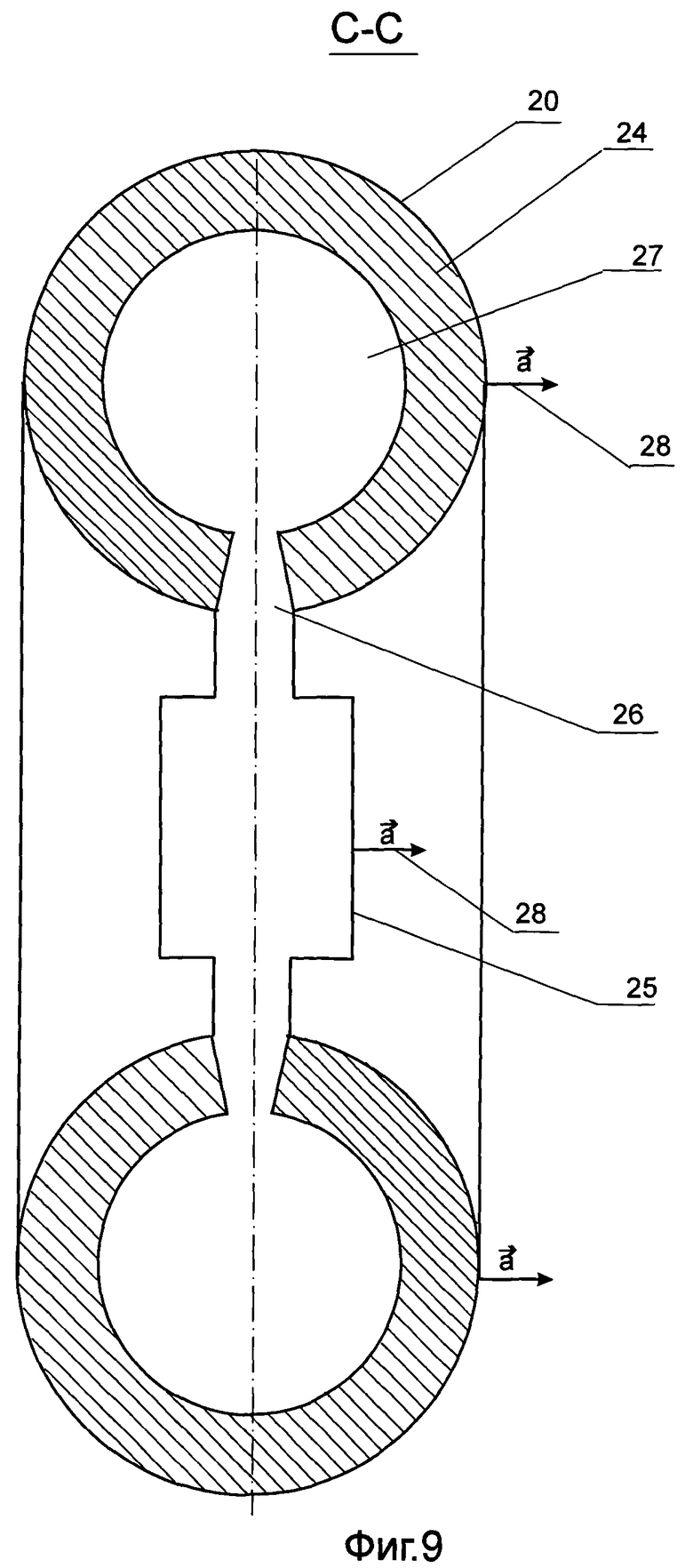
На фиг.9 показан схематический вид сечения С-С по фиг.8 средства перемещения.
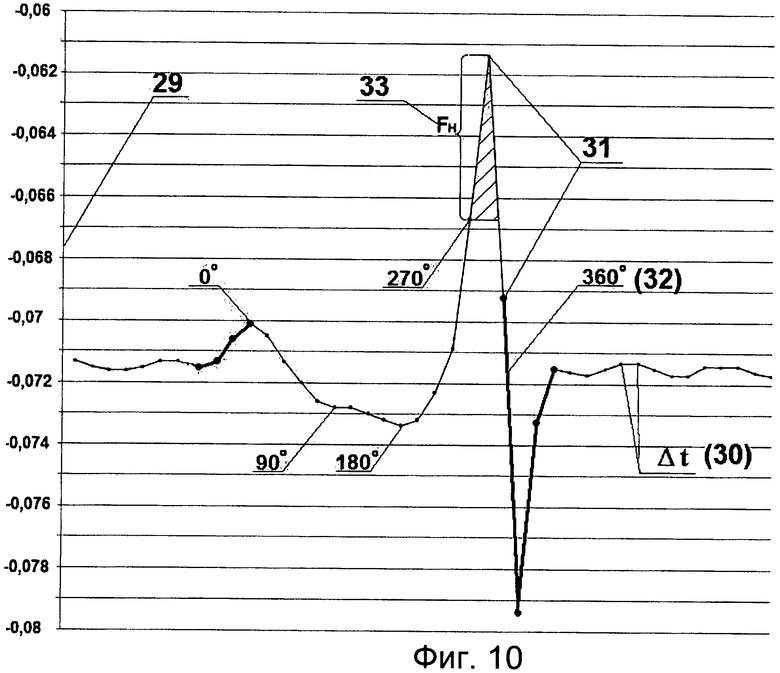
На фиг.10 представлены показания весов при эксперименте по вращению дополнительного массивного тела при одном его обороте и торможении до угловой скорости ω(t)=ωк=0 в месте его расположения до начала вращения.
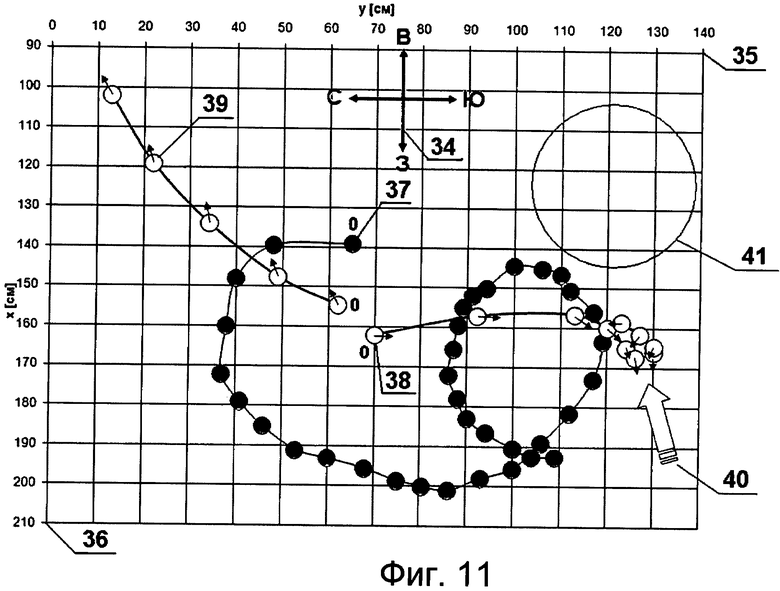
На фиг.11 представлены результаты эксперимента по перемещению батискафа в бассейне с движителем на основе вращения ротора с дополнительным массивным телом.
На фиг.1-11 и в тексте приняты следующие обозначения:
1 - угловая скорость вращения ротора ω;
2 - время t;
3 - характер изменения угловой скорости вращения ω от t при разгоне ротора;
4 - характер изменения угловой скорости вращения ω от t при торможении ротора;
5 - расположение во времени места нахождения дополнительного массивного тела после завершения им одного оборота ротора;
6 - расположение во времени места нахождения дополнительного массивного тела одним оборотом ротора ранее;
7 - роторный модуль;
8 - измеритель ускорения объекта;
9 - блок управления;
10 - первая пара роторных модулей;
11 - N-я пара роторных модулей;
12 - корпус объекта;
13 - ротор;
14 - разгонно-тормозной блок;
15 - измеритель параметров вращения ротора;
16 - блок фиксации, выполненный с возможностью определения момента прохождения размещенного на роторе излучателя 18;
17 - дополнительное массивное тело;
18 - излучатель;
19 - ось вращения ротора;
20 - корпус средства перемещения;
21 - направление гироскопического момента ротора;
22 - направление вращения ротора;
23 - направление силы тяги;
24 - устройство создания тяги;
25 - кабина управления с торцевыми поверхностями, выполненными из прозрачного для света материала;
26 - переходные отсеки;
27 - объем для полезной нагрузки;
28 - направление ускорения средства перемещения;
29 - показания весов;
30 - шаг измерений по времени Δt;
31 - текущее значение показаний весов;
32 - угловое значение фазы поворота;
33 - величина силы, полученная от движения дополнительного массивного тела;
34 - стороны горизонта;
35 - координата y [см];
36 - координата x [см];
37 - положения батискафа при движении без вращения дополнительного массивного тела (эксперимент в 15 час 06 мин);
38 - положения батискафа при движении с вращением дополнительного массивного тела (эксперимент в 10 час 04 мин);
39 - положения батискафа при движении с вращением дополнительного массивного тела (эксперимент в 16 час 28 мин);
40 - направление течения в данном месте бассейна;
41 - размер батискафа.
Устройство создания тяги 24 (фиг.2, 3, 4) содержит корпус объекта 12, измеритель ускорения объекта 8, блок управления 9, 2N, где N=1, 2, 3, …, роторных модулей 7, которые размещены симметрично в корпусе объекта 12, каждый из роторных модулей 7 состоит из ротора 13, дополнительного массивного тела 17, размещенного на периферии ротора 13, М, где М=3, 4, 5, …, разгонно-тормозных блоков 14, жестко закрепленных на корпусе объекта 12, излучателя 18, размещенного на роторе 13, К, где К=1, 2, …М, измерителей параметров вращения ротора 15 и блока фиксации 16, выполненного с возможностью определения момента прохождения размещенного на роторе излучателя 18, ротор 13 выполнен с возможностью торможения, при этом выход соответствующего разгонно-тормозного блока подключен к входу соответствующего измерителя параметров вращения ротора 15, выходы К измерителей параметров вращения роторов являются первыми сигнальными выходами роторного модуля 7, вторым сигнальным выходом которого является выход блока фиксации 16, выполненного с возможностью определения момента прохождения размещенного на роторе излучателя 18, а управляющие входы разгонно-тормозных блоков 14 образуют управляющие входы роторного модуля 7, 2N роторных модулей 7 образуют N пар роторных модулей 7, при этом первые сигнальные выходы соответствующего роторного модуля 7 соединены с соответствующими первыми сигнальными входами блока управления 9, вторые сигнальные входы которого подключены к вторым сигнальным выходам роторных модулей 7 соответственно, а третий сигнальный вход блока управления 9 соединен с выходом измерителя ускорения объекта 8, управляющие выходы блока управления 9 подключены к управляющим входам роторных модулей 7 соответственно.
Если К<М, то есть когда количество измерителей параметров вращения ротора 15 меньше количества разгонно-тормозных блоков 14, то выходы «свободных» разгонно-тормозных блоков 14, естественно, никуда не подключены.
Технический результат достигается при произвольном значении из диапазона К=1, 2, …, М. Значение К зависит от конкретной реализации изобретения. В случае когда доминирующим требованием является уменьшение массогабаритных характеристик целесообразно использовать малое количество измерителей параметров вращения ротора 15, например (К=1,2). В случае требования повышенной точности измерения параметров вращения ротора 15 целесообразно использовать большее количество измерителей параметров вращения ротора 15, вплоть до М (К=М), поскольку увеличение числа измерений улучшает точностные характеристики (см., например: Испытания радиоаппаратуры. В.Д.Малинский, Д.Н.Ошер, Л.Я.Теплицкий. М.-Л.: Энергия, 1965, стр.71-75).
В частных случаях и в конкретных формах выполнения изобретения устройство характеризуется следующими признаками:
- размещают роторы 13 в η-й, где η=1, 2, 3, …N, паре роторов в одной плоскости;
- размещают роторы 13 в η-й, где η=1, 2, 3, …N, паре роторов в параллельных плоскостях;
- обеспечивают в η-й, где η=1, 2, 3…N, паре нулевой гироскопический момент;
- в η, где η=1, 2, 3…N, парах роторов обеспечивают нулевой по величине гироскопический момент;
- блок управления 9 осуществляет торможение дополнительного массивного тела 17 i-го, где i=1, 2, 3, …2N, ротора 13 в месте расположения разгонно-тормозного блока 14;
- блок управления 9 обеспечивают для i-го, где i=1, 2, 3, …2N, ротора 13 конечное значение его угловой скорости ωкон.i, равное нулю;
- выполняют дополнительное массивное тело 17 из вещества с удельным весом более 8 г/см3;
- выполняют дополнительное массивное тело 17 массой более 20% от основной массы ротора;
- располагают на объекте две пары роторов, каждый ротор 13 сцеплен с четырьмя разгонно-тормозными блоками 14, расположенными с азимутальной симметрией относительно ротора 13, при этом разгонно-тормозные блоки 14 в каждой паре роторов размещают на диаметрально-противоположных направлениях и на равных углах между собой;
- блок управления 9 выполнен с возможностью осуществления разгона и торможения роторов 7;
- величина угловой скорости вращения ω роторов 13 не превышает 4 Гц;
- роторы 7 выполнены в виде колец.
Устройство работает следующим образом.
С помощью разгонно-тормозных блоков 14, жестко закрепленных на корпусе объекта 12, раскручивают ротор 13 с дополнительным массивным телом 17 до угловой скорости ωi в соответствии с графиком (позиция 1), показанным на фиг.1; используя излучатель 18 и блок фиксации 16, определяют момент времени, когда дополнительное массивное тело 17 занимает положение 5 своего местонахождения оборотом раньше 6, и осуществляют торможение i-го ротора в этом месте на относительную величину угловой скорости
Δωi/ω=(ω-ωкон.i)/ω,
где ωкон.i - конечное значение угловой скорости i-го ротора после торможения, влияющее на силу тяги и находящееся в диапазоне значений 1≥Δωi/ω>0, при этом производят торможение i-го ротора в роторной паре по достижении им значения заданной угловой скорости ωзад.i, определяемой величиной требуемого ускорения объекта aтреб при одном его обороте:
aтреб=P·ωзад.i,
где Р - размерный коэффициент, эмпирически определяемый конструкцией объекта.
В зависимости от необходимого направления силы тяги 23 (фиг.7) торможение осуществляют в нужном i-м роторе (фиг.6) и, используя нужное разгонно-тормозное устройство. Осуществляют Li оборотов i-го ротора, при этом значение Li определяют по величине требуемого ускорения объекта, ограниченного его прочностными характеристиками.
На фиг.5-7 для примера показан горообразный объект и его сечения А-А и В-В для случая четырех роторных модулей 7. На фиг.6, 7 показано направление силы тяги Fт 23 и направления гироскопического момента роторов 21. Видно, что устройство способно обеспечивать нулевой гироскопический момент.
Известно средство перемещения в пространстве для межпланетного экспедиционного комплекса с ядерным реактором [Пилотируемая экспедиция на Марс, Изд. Российской академии космонавтики им. К.Э.Циолковского, Москва-Королев, 2006 г., стр.66], которое содержит реактор, радиационную защиту, радиаторы, двигательные модули, использующие реактивный принцип движения, корабль возвращения на Землю, межпланетный орбитальный корабль, взлетно-посадочный комплекс. Межпланетный орбитальный корабль содержит: жилой модуль, состоящий из корпуса, содержащего рабочий отсек, жилой отсек, переходные отсеки, агрегатный отсек, складской модуль, баки с рабочим телом.
Указанное техническое решение выбрано прототипом для заявленного средства перемещения.
Главным недостатком этого известного средства перемещения является то, что космический аппарат является теплоизолированным телом и для сброса тепла при работе ядерного реактора требуется огромное количество радиаторов. При возникновении нештатной ситуации в работе реактора (неожиданное выделение дополнительного тепла, например связанное с открывшимися недавно новыми физическими явлениями [Baurov Yu.A., Konradov A.A., Kuznetsov E.A., Kushniruk V.F., Ryabov Y.B., Senkevich A.P., Sobolev Yu.G., Zadorozsny S. // Mod. Phys. Lett A. 2001, v.16, №32, p.2089; Бауров Ю.А., Соболев Ю.Г., Рябов Ю.В., Кушнирук В.Ф. // Ядерная физика. 2007, том 70, №11, с.1875]), существует большая вероятность гибели всей экспедиции. Недостатки приведенного выше в описании на стр.1 (Исследование ракетных…) первого аналога также присущи данному средству перемещения.
Средство перемещения (фиг.8, 9) содержит корпус средства перемещения 20, выполненный в виде тора, соединенного с помощью R, где R=1, 2, 3, …, переходных отсеков 26 с кабиной управления 25, находящейся в центре средства перемещения, устройство создания тяги 24, блок управления и навигации, измеритель ускорения средства перемещения, при этом устройство создания тяги 24 содержит корпус средства перемещения 20, измеритель ускорения средства перемещения, блок управления 9, 2N, где N=1, 2, 3, …, роторных модулей 7, которые размещены с азимутальной симметрией в корпусе объекта 12, каждый из роторных модулей 7 состоит из ротора 13, дополнительного массивного тела 17, размещенного на периферии ротора 13, М, где М=3, 4, 5, …, разгонно-тормозных блоков 14, жестко закрепленных на корпусе объекта 12, излучателя 18, размещенного на роторе 13, К, где К=1, 2, …М, измерителей параметров вращения ротора 15 и блока фиксации 16, выполненного с возможностью определения момента прохождения размещенного на роторе излучателя 18, ротор 13 выполнен с возможностью торможения, при этом выход соответствующего разгонно-тормозного блока подключен к входу соответствующего измерителя параметров вращения ротора 15, выходы К измерителей параметров вращения роторов являются первыми сигнальными выходами роторного модуля 7, вторым сигнальным выходом которого является выход блока фиксации 16, выполненного с возможностью определения момента прохождения размещенного на роторе излучателя 18, а управляющие входы разгонно-тормозных блоков 14 образуют управляющие входы роторного модуля 7, 2N роторных модулей 7 образуют N пар роторных модулей 7, при этом первые сигнальные выходы соответствующего роторного модуля 7 соединены с соответствующими первыми сигнальными входами блока управления 9, вторые сигнальные входы которого подключены к вторым сигнальным выходам роторных модулей 7 соответственно, а третий сигнальный вход блока управления 9 соединен с выходом измерителя ускорения объекта 8, управляющие выходы блока управления 9 подключены к управляющим входам роторных модулей 7 соответственно, выход блока управления и навигации соединен с дополнительным входом блока управления устройства создания тяги.
Блок управления и навигации, размещенный в средстве перемещения 20, на фигурах 1-11 не показан и поэтому не имеет номера, так как для понимания сущности заявленного предложения его изображение на фигурах необязательно. Измеритель ускорения средства перемещения тождественен измерителю ускорения объекта 8 и не показан на фигурах.
В частных случаях и в конкретных формах выполнения средство перемещения характеризуется следующими признаками:
- кабина управления 25 выполнена в виде цилиндра, ось которого совпадает с осью средства перемещения;
- торцевые поверхности кабины управления 25 выполнены из прозрачного для света материала;
- блок управления 9 выполнен с возможностью осуществления разгона и торможения роторов 13;
- в устройстве создания тяги 24 размещают роторы в η-й, где η=1, 2, 3, …N, паре роторов в одной плоскости;
- в устройстве создания тяги 24 размещают роторы 13 в η-й, где η=1, 2, 3, …N, паре роторов в параллельных плоскостях;
- в устройстве создания тяги 24 обеспечивают в η-й, где η=1, 2, 3…N, паре роторов нулевой гироскопический момент;
- в устройстве создания тяги 24 обеспечивают нулевой по величине гироскопический момент в η, где η=1, 2, 3…N, пар роторов;
- в устройстве создания тяги 24 блок управления 9 осуществляет торможение дополнительного массивного тела i-того, где i=1, 2, 3, …2N, ротора в месте расположения соответствующего разгонно-тормозного блока 14;
- в устройстве создания тяги 24 блок управления 9 обеспечивает для i-го, где i=1, 2, 3, …2N, ротора конечное значение его угловой скорости ωкон.i, равное нулю;
- в устройстве создания тяги выполняют дополнительное массивное тело из вещества с удельным весом более 8 г/см3;
- в устройстве создания тяги выполняют дополнительное массивное тело массой более 20% от основной массы ротора;
- в устройстве создания тяги располагают на объекте две пары роторов, каждый ротор связан с четырьмя разгонно-тормозными блоками, расположенными с азимутальной симметрией относительно ротора, при этом разгонно-тормозные блоки в каждой паре роторов размещают на диаметрально-противоположных направлениях и на равных углах между собой;
- величина угловой скорости вращения ω роторов 13 не превышает 4 Гц;
- в устройстве создания тяги 24 роторы 13 выполнены в виде колец.
На фиг.8 представлен схематический вид средства перемещения, состоящего из корпуса средства перемещения 20, выполненного в виде тора, кабины управления 25, имеющей прозрачные торцевые поверхности и содержащей блок управления и навигации, переходных отсеков 26 и устройства создания тяги 24.
На фиг.9 показан схематический вид сечения С-С по фиг.8 средства перемещения, на котором представлен схематический вид средства перемещения, состоящего из корпуса средства перемещения 20, выполненного в виде тора, с кабиной управления 25, имеющей прозрачные торцевые поверхности и содержащей блок управления и навигации, переходных отсеков 26 и устройства создания тяги 24.
Средство перемещения 20 создает тягу с помощью устройства создания тяги 24, описанного выше, имеет большой объем для полезной нагрузки 27, обеспечивает хороший обзор за счет больших прозрачных торцевых поверхностей у кабины управления 25.
Поддержание постоянного ускорения средства перемещения 28 обеспечивает наличие искусственной тяжести, особенно полезной при движении в космическом пространстве.
Измеритель ускорения объекта 8 известен, см., например: Ф. Гудинаф. Интегральный акселерометр на 50 G с самоконтролем, реализованным на нагреваемом возбудителе. Электроника, 1993, №7-8, стр.54-57, блок управления 9 может быть реализован на основе микроконтроллеров различных серий, см., например: М.С.Голубцов. Микроконтроллеры AVR: от простого к сложному. Солон-Пресс, 2003, стр.9-14, разгонно-тормозные блоки 14 могут быть выполнены в виде электромоторов с торможением, которые известны, см., например: А.В.Емельянов, А.Н.Шилин. Шаговые двигатели. Политехник, 2005, стр.4-12.
Сцепление разгонно-тормозных блоков 14 с ротором 13 может осуществляться различными способами, например в виде зубчатой или фрикционной передачи, измеритель параметров вращения ротора 15, измеряющий угловые скорости и ускорение на валу электродвигателя, известен, см., например: В.Рубцов. Цифровой тахометр. Радиолюбитель, 1997. №5, стр.24.
Блок фиксации 16, выполненный с возможностью определения момента прохождения размещенного на роторе излучателя 18, и излучатель 18 могут быть выполнены на основе электронно-оптического преобразователя, описанного, например, в книге Ф.И.Финкельштейна «Основы радиолокации», «Сов. Радио», 1973, стр.402-404, а также с возможностью использования магнитного или индукционного излучателей.
В простейшем случае указанные выше блоки 18 и 16 представляют собой светодиоды: излучающий и приемный соответственно. Возможен и иной частотный диапазон функционирования блоков 18 и 16.
Блок управления и навигации (на иллюстрациях не показан) решает конкретную полетную задачу средства перемещения. Он известен и широко применяется; тысячи космических объектов выполняют с его помощью поставленные задачи, см., например, книгу Б.В.Раушенбаха «Управление ориентацией космических аппаратов», изд. «Наука», 1974, стр.230-234.
Наземные экспериментальные исследования предложенного способа создания тяги, устройства для его осуществления и средства перемещения подтвердили реализуемость заложенных в изобретении физических принципов.
Из большой серии экспериментов (более 100), проведенных на экспериментальной базе, приведем результаты только четырех опытов.
На фиг.10 представлены показания весов при эксперименте в 10° по вращению дополнительного массивного тела массой 15 г, прикрепленного к ротору радиусом 9 см, в вертикальной плоскости при одном его обороте и торможении до угловой скорости ω(t)=ωк=0 в месте его расположения до начала вращения. По оси ординат отложены показания весов 29, представляющие собой скользящее среднее за 0,1 секунды 31 при опросе весов с частотой в 50 Гц, по оси абсцисс отложено дискретное время 30 через каждые 0,1 секунды. Жирной линией отмечено положение дополнительного массивного тела при нулевой фазе вращения 35 (старт) и при завершении вращения (фаза равна 360°). Заштрихованная часть 33 представляет собой силу тяги.
Как видно из рисунка, величина тяги, полученная от вращения дополнительного массивного тела, видна на уровне (4-5) г при вращении тела массой 15 г.
На фиг.11 представлены результаты трех экспериментов по перемещению батискафа 41 в бассейне с движителем на основе вращения ротора с дополнительным массивным телом. Черными кружками 37 показано движение батискафа без вращения ротора с дополнительным массивным телом. Серыми кружками показаны траектории движения батискафа с вращением ротора с дополнительным массивным телом.
Как видно из экспериментов, траектории движения батискафа с вращением ротора с дополнительным массивным телом и без вращения не коррелируют между собой. Только при попадании в область с сильным течением 40 виден поворот движения батискафа. Эксперименты ставились при сведении всех возможных ошибок эксперимента к минимуму.
Бассейн размещался на специальном деревянном половом покрытии высотой 150 мм для увеличения расстояния от электродвигателя, вращающего дополнительное массивное тело и содержащего магнит в своем статоре, до бетонного пола.
Другими основными систематическими ошибками демонстрационного эксперимента являются ошибка, связанная со стартом батискафа, поскольку невозможно практически реализовать на старте величину скорости батискафа, равную нулю, и ошибка, обусловленная влиянием течений воды в бассейне. Всегда старт батискафа осуществлялся из центральной зоны бассейна диаметром 3,5 м, течения воды в котором заранее были исследованы, т.е. в максимальной дали от стенок и возможных краевых эффектов.
В экспериментах использовались две методики осуществления старта батискафа.
В первой методике батискаф прикреплялся с помощью нити к специальной раме. Длина нити позволяла перемещения батискафа на расстояния, соответствующие отклонению нити от вертикали на 20° (около 0,1 м). Если в батискафе ротор модели вращался, то старт осуществлялся из состояния покоя, когда сила тяги модели была уравновешена силой натяжения нити. В момент старта тонкая шелковая нить пережигалась с помощью небольшого факела, конвекция воздуха от которого практически не влияла на перемещение батискафа. Реакция разрыва нити создавала скорость батискафу не более 0,5 см/мин. Во второй методике использовалась ручная установка батискафа в центральной зоне бассейна, которая создавала стартовую скорость батискафа на таком же уровне.
Всего было проведено более 100 опытов с батискафом сферической формы.
Важнейшим аспектом исследования было изучение движений батискафа в бассейне при выключенной модели. Как показало это исследование, картина течений в бассейне зависит от перепада температур между воздухом в помещении, где располагался бассейн, и температурой воды в бассейне, а также от глубины бассейна. Во всех опытах разница температур между воздухом и водой в бассейне не превышала 2,6°С. Температура в помещении во время всех экспериментов находилась в диапазоне от 22°С до 23°С. Температурные изменения воды в бассейне не превышали 0,05°С. Эксперименты показали, что при глубине бассейна ниже 0,45 м разница в движении батискафа с включенной и выключенной моделью практически исчезала. Частота вращения ротора модели находилась в диапазоне (3-4) Гц. Частоты более 4 Гц вызывали резонансные явления в модели, а при частоте менее 2 Гц эффект тяги модели сильно ослабевал.
Данное устройство и средство перемещения не расходует топливо, уменьшая тем самым массогабаритные характеристики КО. Энергия движения берется из собственной энергии элементарных частиц согласно формуле Эйнштейна Е=mc2 [Бауров Ю.А. Структура физического пространства и новый способ получения энергии (теория, эксперимент, прикладные вопросы). М.: Кречет, 1998, 240 с.; Baurov Yu.A. «On the structure of physical vacuum and a new interaction in Nature (Theory, Experiment and Applications)» Nova Science, NY, 2000, 217 р.; Baurov Yu.A. Global Anisotropy of Physical Space. Experimental and Theoretical Basis. Nova Science, NY, 2004, стр.115] в результате изменения суммарного потенциала всеми полевыми структурами, входящими в материю дополнительного тела.
В процессе движения средства перемещения происходит обмен импульсом между средством перемещения и физическим пространством или в стандартном понимании физическим вакуумом - наименьшим энергетическим состоянием физических полей, из которого рождаются и куда уходят элементарные частицы [Л.Б.Окунь. Лептоны и кварки. М.: Наука, 1990, стр.17].
Предложенное изобретение основано на результатах экспериментов и тщательном исследовании всех возможных систематических ошибок, поэтому интерпретация результатов на базе модели [Бауров Ю.А. Структура физического пространства и новый способ получения энергии (теория, эксперимент, прикладные вопросы). М.: Кречет, 1998, 240 с.; Baurov Yu.A. «On the structure of physical vacuum and a new interaction in Nature (Theory, Experiment and Applications)» Nova Science, NY, 2000, 217 р.; Baurov Yu.A. Global Anisotropy of Physical Space. Experimental and Theoretical Basis. Nova Science, NY, 2004, p.115] приведена только как возможный вариант физики наблюдаемых процессов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ ТЯГИ И ЭНЕРГО-ДВИГАТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2016 |
|
RU2630275C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В КОСМИЧЕСКОМ ПРОСТРАНСТВЕ | 2007 |
|
RU2338669C1 |
| ГЕНЕРАТОР МЕХАНИЧЕСКОЙ ЭНЕРГИИ (ВАРИАНТЫ) | 1996 |
|
RU2132109C1 |
| СПОСОБ ГЕНЕРИРОВАНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2091976C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТЕПЛОВОЙ ЭНЕРГИИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2251629C1 |
| СПОСОБ СПАСЕНИЯ ЛЮДЕЙ ИЗ СЕЙСМИЧЕСКИ ОПАСНОГО РАЙОНА ПРИ УГРОЗЕ ЗЕМЛЕТРЯСЕНИЯ | 2008 |
|
RU2346717C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2147696C1 |
| СПОСОБ ГЕНЕРИРОВАНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2121602C1 |
| СПОСОБ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2132042C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 1992 |
|
RU2082900C1 |
Изобретения относятся к области транспортных средств и могут быть использованы в двигательных системах различных объектов, в т.ч. космических. Способ заключается во вращении расположенных на объекте 2N роторов, каждый из которых выполнен с дополнительным массивным телом на его периферии и сцеплен с управляемыми разгонно-тормозными блоками. Роторы по крайней мере в одной из N пар раскручивают в противоположных направлениях. При этом в пределах одного оборота каждого i-го ротора быстро доводят (3) величину угловой скорости (1) его вращения до значения ωi, а затем предельно быстро тормозят (4) ротор до минимально возможного (нулевого) значения его угловой скорости. В таком режиме обеспечивается старт указанного массивного тела на роторе с небольшой скоростью, быстрый набор телом скорости в течение оборота и сброс скорости тела в месте (5), где это тело располагалось оборотом раньше (6). Заданное значение ωi определяется требуемым ускорением (aтреб), получаемым объектом от i-го ротора при одном его обороте, по формуле aтреб=P·ωзад.i, где P - эмпирический коэффициент, зависящий от конструкции объекта. Указанные N пар роторов на объекте размещают в соответствии с требуемыми направлениями силы тяги. Число Li оборотов каждого i-го ротора определяют исходя из требуемой скорости разгона объекта за данные Li оборотов (с учетом всех работающих роторов). Техническим результатом изобретений является уменьшение энергозатрат, увеличение полезного объема и упрощение системы управления движением транспортного средства. 3 н. и 23 з.п. ф-лы, 11 ил.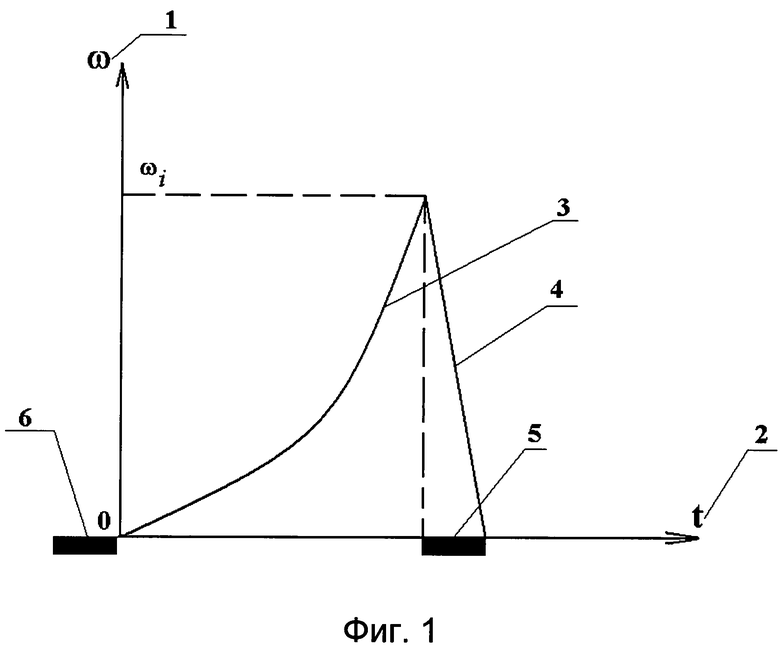
1. Способ создания тяги, заключающийся во вращении расположенного на объекте ротора, который содержит дополнительное массивное тело, размещенное на его периферии, отличающийся тем, что на объекте дополнительно располагают 2N-1 роторов, где N=1, 2, 3, …, причем каждый ротор выполнен с дополнительным массивным телом, размещенным на его периферии, так что 2N роторов образуют N пар роторов, располагают на объекте М разгонно-тормозных блоков, жестко закрепленных на корпусе объекта, при этом каждый ротор сцеплен с Ф разгонно-тормозными блоками, где Ф=3, 4, 5, …, M=2N·Ф, раскручивают в противоположных направлениях два ротора по крайней мере одной из N пар роторов, доводят величину угловой скорости ω вращения каждого ротора при одном его обороте до значения ωi, где i=1, 2, 3, …2N - номер ротора, осуществляют торможение i-го ротора до конечного минимально возможного значения его угловой скорости ωкон.i, причем обеспечивают старт указанного дополнительного массивного тела на роторе с небольшой скоростью, быстрый набор телом скорости в течение оборота при достижении ротором заданной угловой скорости ωзад.i, определяемой величиной требуемого ускорения объекта при одном его обороте
aтреб.=P·ωзад.i,
где Р - размерный коэффициент, эмпирически определяемый конструкцией объекта, и предельно быстрый сброс скорости тела в месте его расположения оборотом раньше, при этом располагают указанные пары роторов на объекте в зависимости от требуемого направления силы тяги и осуществляют Li, оборотов каждого i-го ротора, где Li определяют по величине требуемого ускорения объекта за данные Li оборотов.
2. Способ по п.1, отличающийся тем, что размещают роторы в η-й, где η=1, 2, … N, паре роторов в одной плоскости.
3. Способ по п.1, отличающийся тем, что размещают роторы в η-й, где η=1, 2, …N, паре роторов в параллельных плоскостях.
4. Способ по п.1, отличающийся тем, что обеспечивают в η-й, где η=1, 2, 3, …N, паре нулевой гироскопический момент.
5. Способ по п.1, отличающийся тем, что обеспечивают в η, где η=1, 2, 3, …N, парах роторов нулевой по величине гироскопический момент.
6. Способ по п.1, отличающийся тем, что тормозят дополнительное массивное тело i-го, где i=1, 2, 3, …2N, ротора в месте расположения разгонно-тормозного блока.
7. Способ по п.1, отличающийся тем, что обеспечивают для i-го, где i=1, 2, 3, …2N, ротора конечное значение его угловой скорости ωкон.i, равное нулю.
8. Способ по п.1, отличающийся тем, что выполняют дополнительное массивное тело из вещества с удельным весом более 8 г/см3.
9. Способ по п.1, отличающийся тем, что выполняют дополнительное массивное тело массой более 20% массы ротора.
10. Способ по любому из пп.1-9, отличающийся тем, что выполняют роторы в виде колец.
11. Устройство создания тяги, содержащее корпус объекта, ротор, дополнительное массивное тело, размещенное на периферии ротора, отличающееся тем, что в него введены размещенный на роторе излучатель, М разгонно-тормозных блоков, жестко закрепленных на корпусе объекта, где М=3, 4, 5, …, блок фиксации, выполненный с возможностью определения момента его прохождения размещенным на роторе излучателем, К измерителей параметров вращения ротора, где К=1, 2, …М, при этом ротор, который выполнен с возможностью торможения, дополнительное массивное тело, размещенное на периферии ротора, размещенный на роторе излучатель, указанные М разгонно-тормозных блоков, жестко закрепленных на корпусе объекта, и указанные К измерителей параметров вращения ротора образуют первый роторный модуль, при этом выход соответствующего разгонно-тормозного блока подключен к входу соответствующего измерителя параметров вращения ротора, выходы К измерителей параметров вращения роторов являются первыми сигнальными выходами первого роторного модуля, вторым сигнальным выходом которого является выход блока фиксации, а управляющие входы разгонно-тормозных блоков образуют управляющие входы первого роторного модуля, при этом также введены измеритель ускорения объекта, блок управления и 2N-1 роторных модулей, одинаковых с первым роторным модулем, где N=1, 2, 3, …, так что 2N роторных модулей образуют N пар роторных модулей, при этом первые сигнальные выходы соответствующего роторного модуля соединены с соответствующими первыми сигнальными входами блока управления, вторые сигнальные входы которого подключены к вторым сигнальным выходам роторных модулей соответственно, а третий сигнальный вход блока управления соединен с выходом измерителя ускорения объекта, причем управляющие выходы блока управления подключены к управляющим входам соответствующих роторных модулей.
12. Устройство по п.11, отличающееся тем, что размещают роторы в η-й, где η=1, 2, 3, …N, паре роторов в одной плоскости.
13. Устройство по п.11, отличающееся тем, что размещают роторы в η-й, где η=1, 2, 3, …N, паре роторов в параллельных плоскостях.
14. Устройство по п.11, отличающееся тем, что обеспечивают в η-й, где η=1, 2, 3, …N, паре нулевой гироскопический момент.
15. Устройство по п.11, отличающееся тем, что в η, где η=1, 2, 3, …N, парах роторов обеспечивают нулевой по величине гироскопический момент.
16. Устройство по п.11, отличающееся тем, что блок управления выполнен с возможностью торможения дополнительного массивного тела i-го, где i=1, 2, 3, …2N, ротора в месте расположения соответствующего разгонно-тормозного блока.
17. Устройство по п.11, отличающееся тем, что блок управления выполнен с возможностью обеспечения для i-го, где i=1, 2, 3, …2N, ротора конечного значения его угловой скорости ωкон.i, равного нулю.
18. Устройство по п.11, отличающееся тем, что выполняют дополнительное массивное тело из вещества с удельным весом более 8 г/см3.
19. Устройство по п.11, отличающееся тем, что выполняют дополнительное массивное тело массой более 20% от основной массы ротора.
20. Устройство по п.11, отличающееся тем, что располагают на объекте две пары роторов, причем каждый ротор связан с четырьмя разгонно-тормозными блоками, расположенными с азимутальной симметрией относительно ротора, при этом разгонно-тормозные блоки в каждой паре роторов размещают на диаметрально-противоположных направлениях и на равных углах между собой.
21. Устройство по п.11, отличающееся тем, что блок управления выполнен с возможностью осуществления разгона и торможения роторов.
22. Устройство по п.11, отличающееся тем, что величина угловой скорости ω вращения роторов не превышает 4 Гц.
23. Устройство по любому из пп.11-21, отличающееся тем, что роторы выполнены в виде колец.
24. Средство перемещения, содержащее корпус средства перемещения, устройство создания тяги, блок управления и навигации, отличающееся тем, что в него введены измеритель ускорения средства перемещения, а корпус средства перемещения выполнен в виде тора, соединенного с помощью R переходных отсеков, где R=1, 2, 3, …, с кабиной управления, находящейся в центре средства перемещения, при этом устройство создания тяги содержит блок управления, 2N роторных модулей, где N=1, 2, 3, …, которые размещены с азимутальной симметрией в корпусе средства перемещения, причем каждый из роторных модулей состоит из ротора, дополнительного массивного тела, размещенного на периферии ротора, М разгонно-тормозных блоков, жестко закрепленных на корпусе объекта, где М=3, 4, 5, …, излучателя, размещенного на роторе, К измерителей параметров вращения ротора, где К=1, 2, …М, и блока фиксации, выполненного с возможностью определения момента его прохождения размещенным на роторе излучателем, при этом ротор выполнен с возможностью торможения, а выход соответствующего разгонно-тормозного блока подключен к входу соответствующего измерителя параметров вращения ротора, выходы К измерителей параметров вращения роторов являются первыми сигнальными выходами роторного модуля, вторым сигнальным выходом которого является выход указанного блока фиксации, управляющие входы разгонно-тормозных блоков образуют управляющие входы роторного модуля, 2N роторных модулей образуют N пар роторных модулей, при этом первые сигнальные выходы соответствующего роторного модуля соединены с соответствующими первыми сигнальными входами блока управления, вторые сигнальные входы которого подключены к вторым сигнальным выходам роторных модулей соответственно, а третий сигнальный вход блока управления соединен с выходом измерителя ускорения средства перемещения, управляющие выходы блока управления подключены к управляющим входам роторных модулей соответственно, а выход блока управления и навигации соединен с дополнительным входом блока управления устройства создания тяги.
25. Средство перемещения по п.23, отличающееся тем, что кабина управления выполнена в виде цилиндра, ось которого совпадает с осью средства перемещения.
26. Средство перемещения по п.23, отличающееся тем, что торцевые поверхности кабины управления выполнены из прозрачного для света материала.
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В КОСМИЧЕСКОМ ПРОСТРАНСТВЕ | 2007 |
|
RU2338669C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2023203C1 |
| ГЕНЕРАТОР МЕХАНИЧЕСКОЙ ЭНЕРГИИ (ВАРИАНТЫ) | 1996 |
|
RU2132109C1 |
| DE 3639899 A1, 14.01.1988 | |||
| Способ введения диэлектрического микроконтейнера в клетку млекопитающего с использованием фемто-пикосекундных импульсов лазерного излучения | 2015 |
|
RU2614269C2 |
| ТРАНСМИССИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2651388C1 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ВОСПРОИЗВОДСТВА ИКРЫ И ЧИСЛЕННОСТИ ОСЕТРООБРАЗНЫХ РЫБ | 2004 |
|
RU2262844C1 |

