Изобретение относится к области гироскопических систем и может быть использовано для определения азимута, например в высокоточных системах различного назначения.
Известен способ азимутальной ориентации платформы трехосного гиростабилизатора (ТГС) по углу прецессии гироблока [1].
Этот способ заключается в том, что гироблок системы горизонтирования и стабилизации одной из горизонтальных осей трехосного гиростабилизатора, которая примерно направлена на север или юг, отключается от штатной системы горизонтирования и стабилизации, горизонтирование же и стабилизацию платформы относительно этой оси осуществляют по выходному сигналу акселерометра, а азимут платформы определяют с использованием информации с широкодиапазонного кодового датчика угла этого гироблока, который с момента отключения его от штатной системы горизонтирования начинает функционировать в режиме двухстепенного гирокомпаса и начинает поворачиваться под действием гироскопического момента, обусловленного горизонтальной составляющей угловой скорости вращения Земли, в сторону совмещения своего вектора кинетического момента с вектором ωГ.
Как следует из сути данного способа, использование широкодиапазонного датчика угла предполагает, что в начальный момент функционирования системы угол между вектором кинетического момента  измерительного гироблока и вектором горизонтальной составляющей угловой скорости вращения Земли должен быть достаточно большим (в идеале близким к 90 град). Только в этом случае гироскопический момент, обусловленный горизонтальной составляющей угловой скорости вращения Земли, будет достаточно большим и за время, необходимое для определения азимута, вектор кинетического момента гироблока
измерительного гироблока и вектором горизонтальной составляющей угловой скорости вращения Земли должен быть достаточно большим (в идеале близким к 90 град). Только в этом случае гироскопический момент, обусловленный горизонтальной составляющей угловой скорости вращения Земли, будет достаточно большим и за время, необходимое для определения азимута, вектор кинетического момента гироблока  повернется на достаточно большой угол, что повышает информативность измеряемого сигнала. С этой целью одну из осей, связанных с платформой ТГС, перед началом измерений грубо приводят по азимуту к меридиану, например методом гирокомпасирования [2, с. 592].
повернется на достаточно большой угол, что повышает информативность измеряемого сигнала. С этой целью одну из осей, связанных с платформой ТГС, перед началом измерений грубо приводят по азимуту к меридиану, например методом гирокомпасирования [2, с. 592].
Алгоритм определения азимута платформы ТГС строится на основе динамической модели гироскопа. Учитывая, что угол между векторами ωГ и Н близок к 90 град, модель гироскопа имеет следующий вид:

где
β - угол прецессии гироскопа, то есть угол между осью платформы ТГС, примерно направленной на север (юг), и осью чувствительности измерительного гироблока, измеряемый широкодиапазонным кодовым датчиком угла последнего;
I - момент инерции гироскопа;
ƒ - коэффициент демпфирования;
Н - кинетический момент;
ωГ - горизонтальная составляющая угловой скорости вращения Земли;
α - угол поворота оси платформы относительно Земли;
ωГБ - угловая скорость собственного ухода измерительного гироблока;
А - начальный азимут платформы;
Мвр - возмущающие воздействия, обусловленные влиянием нескомпенсированной скорости дрейфа платформы относительно вертикальной оси из-за наличия ошибок горизонтирования платформы ТГС.
Данное дифференциальное уравнение нелинейно, не имеет аналитического решения, и определить с высокой точностью на его основе искомый азимут в условиях действия на двухстепенной гироскоп различных внешних и внутренних возмущений НωГБ, Мвр, имеющих случайную природу, весьма затруднительно.
Наиболее близким по технической сущности изобретением является способ азимутальной ориентации платформы трехосного гиростабилизатора по приращениям угла прецессии гироблока [3].
В данном способе одновременно со считыванием информации с широкодиапазонного кодового датчика угла измерительного гироблока рассчитываются номинальные значения данного угла в вычислительном устройстве в соответствии с уравнением номинального движения, а азимут платформы определяют по информационным сигналам, равным разности между номинальными значениями угла прецессии гироблока и соответствующими измеряемыми значениями его широкодиапазонного кодового датчика угла.
Номинальные значения угла прецессии гироблока βН определяются в соответствии с нелинейным дифференциальным уравнением номинального движения [3]:

Данное уравнение описывает изменение угла ВНβН при действии гироскопического момента, обусловленного горизонтальной составляющей угловой скорости вращения Земли ωГ, в предположении, что в начальный момент времени ось Хп платформы ТГС направлена точно на север, а направление оси чувствительности измерительного гироблока совпадает с направлением оси ХП, то есть при t=0: А=0 и β=0. При этом вредные возмущения Мвр отсутствуют.
Номинальные значения угла прецессии гироблока βН в соответствии с (2) могут быть рассчитаны одним из численных методов, например методом Рунге-Кутта [4, с. 417]. В этом случае уравнение (1) можно линеаризовать относительно уравнения (2) и использовать для определения начального азимута А оси ХП платформы ТГС хорошо известные методы оценок параметров линейных систем в условиях действия случайных возмущений, например оптимальный фильтр Калмана.
Однако с момента отключения выходного сигнала акселерометра от датчика моментов измерительного гироблока и подключения его к усилителю системы горизонтирования возникают низкочастотные колебания относительно соответствующей оси с угловой скоростью ωвозм.
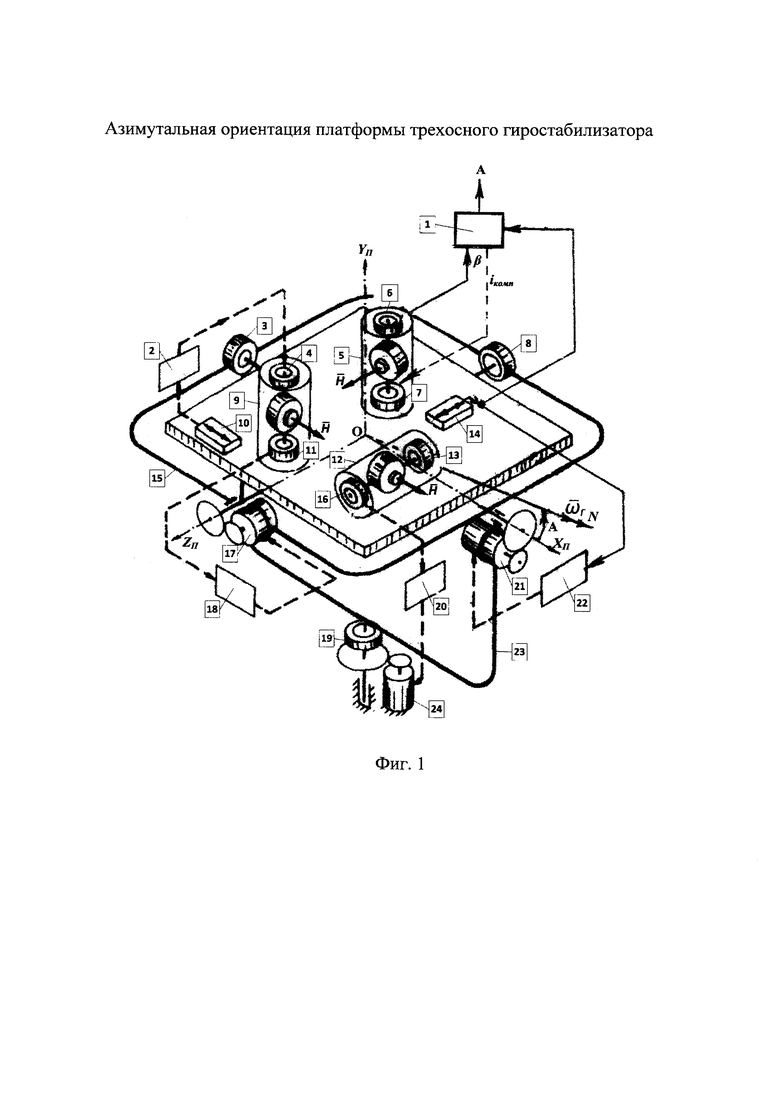
На фиг. 1 представлена структурная схема широко применяемого для построения различных гироскопических систем трехосного гиростабилизатора с вертикальной осью подвеса наружной рамки [2, с. 301, 593] в режиме определения азимута, где обозначено:
1 - вычислительное устройство;
2 - корректирующий контур;
3, 19, 8 - датчики команд платформы ТГС относительно соответствующих осей X, Y, Z;
4, 7, 13 - датчики моментов соответствующих гироблоков 9, 5, 12;
5, 12, 9 - двухстепенные гироблоки системы стабилизации относительно соответствующих осей X, Y, Z;
6 - широко диапазонный кодовый датчик угла гироблока 5;
10, 14 - акселерометры системы горизонтирования платформы ТГС относительно соответствующих осей X, Z;
11, 16 - датчики углов соответственно гироблоков 9 и 12;
15, 23 - внутренняя и наружная ось ТГС соответственно;
21, 24, 17 - стабилизационные двигатели платформы ТГС относительно соответствующих осей X, Y, Z;
22, 18 - усилители системы стабилизации-горизонтирования относительно соответствующих осей X, Z;
20 - усилители системы стабилизации относительно оси Y;
 - вектор кинетического момента соответствующего гироблока;
- вектор кинетического момента соответствующего гироблока;
OXпYпZп - система координат, связанная с платформой ТГС;
ON - направление на север;
ωг - вектор горизонтальной составляющей угловой скорости вращения Земли;
А - азимут оси ХП платформы ТГС в момент начала измерений.
Данные низкочастотные колебания ωвозм., совпадающие с осью платформы ХП (фиг. 1), обусловлены различными причинами, основными из которых являются:
- переходный процесс в системе горизонтирования, обусловленный исключением гироблока Гх из системы горизонтирования;
- отработка системой горизонтирования возмущающих моментов относительно оси ХП платформы ТГС.
В свою очередь, угловая скорость ωвозм вызывает гироскопический момент относительно выходной оси измерительного гироскопа Гх:
Мгир.=Нωвозм.cosβ.
В результате уравнение (1) примет вид:

Данный возмущающий гироскопический момент не содержит информацию об азимуте оси платформы ТГС ХП и, в то же время, снижает точность определения азимута А, так как уже с момента отключения выходного сигнала акселерометра от датчика момента гироблока последний становится гирокомпасом и начинается процесс определения азимута по информационным сигналам, равным разности между номинальными значениями угла прецессии гироблока и соответствующими значениями широкодиапазонного кодового датчика угла этого гироблока.
Целью настоящего изобретения является повышение точности и сокращение времени определения азимута оси платформы.
Для этого в процессе определения азимута платформы одновременно с определением разностного угла измеряют акселерометром Az (фиг. 1) угол отклонения платформы от горизонта, осуществляют его дифференцирование для получения текущих значений угловой скорости ωвозм, рассчитывают в вычислительном устройстве текущие значения тока для компенсации момента Мгир, входящего в исходное уравнение (3):

где iкомп - ток компенсации; β - угол на выходе широкодиапазонного кодового датчика угла гироблока; Кдм - коэффициент датчика моментов гироблока Гх.
После преобразования данного тока из цифровой формы в аналоговую его подают на датчик моментов измерительного гироблока (пунктирная линия на фиг. 1).
Процесс дифференцирования угла отклонения платформы от горизонта, определяемого с помощью акселерометра, можно осуществить различными способами, основными из которых являются:
- использование физически реализуемого дифференцирующего звена [5, с. 41-48];
- использование оптимального фильтра Калмана, в котором по измеряемому углу определяется оценка производной данного угла [6, с. 67].
Расчет тока компенсации может быть осуществлен в вычислительном устройстве ВУ, совмещенном с цифро-аналоговым преобразователем.
Таким образом, технически осуществимо одновременно с определением разностного угла измерение акселерометром угла отклонения платформы от горизонта, дифференцирование его и расчет текущих значений тока компенсации, которые после преобразования из цифровой формы в аналоговую подают на датчик моментов измерительного гироблока.
Источники информации
1. Патент RU 2324897 С1, 20.05.2008.
2. Командно-измерительные приборы / Под ред. Б.И. Назарова. - М.: МО СССР, 1987. - 638 с.
3. Патент RU 2509289 С2, 10.03.2014.
4. Дьяконов В.П. MATLAB 7.*/R2006/R2007. Самоучитель. М.: ДМК Пресс, 2008. - 768 с.
5. Ицхоки Я.С., Овчинников Н.И. Импульсные и цифровые устройства. - М.: «Советское радио», 1973. - 592 с.
6. Брамер К., Зифлинг Г. Фильтр Калмана-Бьюси. - М.: «Наука», 1982, - 200 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО ПРИРАЩЕНИЯМ УГЛА ПРЕЦЕССИИ ГИРОБЛОКА | 2012 |
|
RU2509289C2 |
| Способ калибровки гироблоков платформы трехосного гиростабилизатора | 2020 |
|
RU2757854C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2018 |
|
RU2700720C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПОВОРОТА КОРПУСА ГИРОБЛОКА | 2012 |
|
RU2513631C1 |
| Способ определения азимута платформы трёхосного гиростабилизатора по отклонению угла поворота гироскопа от расчётного значения | 2016 |
|
RU2649063C1 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА НА ПОДВИЖНОМ ОСНОВАНИИ | 2013 |
|
RU2541710C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПРЕЦЕССИИ ГИРОБЛОКА | 2006 |
|
RU2324897C1 |
| Способ калибровки систематической составляющей угловой скорости дрейфа поплавкового гироскопа | 2024 |
|
RU2829458C1 |
| Способ определения азимута трёхосного гиростабилизатора по углу поворота гироскопа | 2020 |
|
RU2729515C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 2010 |
|
RU2428658C1 |
Изобретение относится к области приборостроения и может быть использовано для определения азимутального положения платформы трехосного гиростабилизатора, например в высокоточных навигационных системах различного назначения. Технический результат - повышение точности и сокращение времени определения азимута. Предложенный способ азимутальной ориентации платформы трехосного гиростабилизатора заключается в том, что используют один из гироблоков системы стабилизации гиростабилизированной платформы, при этом горизонтирование платформы относительно одной из осей осуществляют путем отключения акселерометра от датчика моментов гироблока контура стабилизации по этой оси и подключения его к соответствующему двигателю стабилизации через усилитель стабилизации, а азимут платформы определяют по информационным сигналам, равным разности между номинальными значениями угла прецессии гироблока и соответствующими значениями широкодиапазонного кодового датчика угла этого гироблока. При этом одновременно с определением разностного угла измеряют акселерометром угол отклонения платформы от горизонта, осуществляют дифференцирование измеренного угла, рассчитывают текущие значения тока компенсации, который после преобразования из цифровой формы в аналоговую подают на датчик моментов данного гироблока. 1 ил.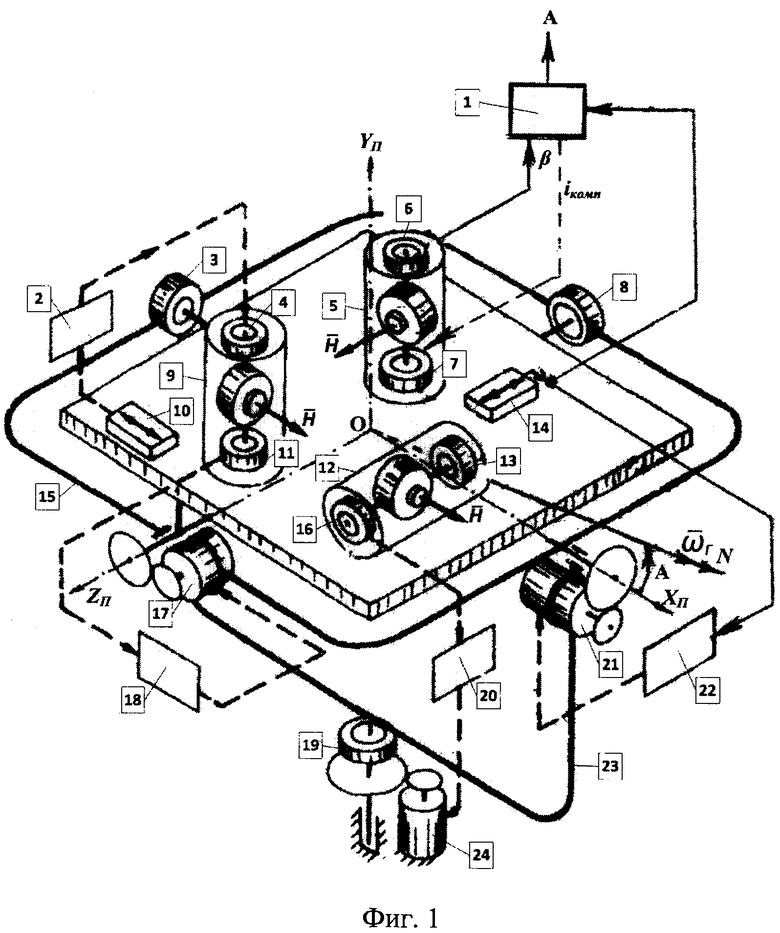
Азимутальная ориентация платформы трехосного гиростабилизатора, заключающаяся в том, что используют один из гироблоков системы стабилизации гиростабилизированной платформы, при этом горизонтирование платформы относительно одной из осей осуществляют путем отключения акселерометра от датчика моментов гироблока контура стабилизации по этой оси и подключения его к соответствующему двигателю стабилизации через усилитель стабилизации, а азимут платформы определяют по информационным сигналам, равным разности между номинальными значениями угла прецессии гироблока и соответствующими значениями широкодиапазонного кодового датчика угла этого гироблока, отличающаяся тем, что одновременно с определением разностного угла измеряют акселерометром угол отклонения платформы от горизонта, осуществляют дифференцирование измеренного угла, рассчитывают текущие значения тока компенсации, который после преобразования из цифровой формы в аналоговую подают на датчик моментов данного гироблока.
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО ИЗМЕНЯЮЩИМСЯ ТОКАМ КОРРЕКЦИИ | 2012 |
|
RU2509979C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО ПРИРАЩЕНИЯМ УГЛА ПРЕЦЕССИИ ГИРОБЛОКА | 2012 |
|
RU2509289C2 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА НА ПОДВИЖНОМ ОСНОВАНИИ | 2013 |
|
RU2541710C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПРЕЦЕССИИ ГИРОБЛОКА | 2006 |
|
RU2324897C1 |
| KR 101400216 B1, 27.05.2014 | |||
| В.И | |||
| СОЛОВЬЕВ и П.Г | |||
| ШАБАЛОВ "Инерциальные навигационные системы" Самара, 2011, стр | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |

