Известен способ азимутальной ориентации платформы трехосного гиростабилизатора по углу прецессии гироблока [1].
Этот способ заключается в том, что используют один из гироблоков системы стабилизации гиростабилизированной платформы, при этом горизонтирование платформы относительно одной из осей осуществляют путем отключения акселерометра от датчика моментов гироблока контура стабилизации по этой оси и подключения его к соответствующему двигателю стабилизации через усилитель стабилизации, а азимут платформы определяют с использованием информации с широкодиапазонного кодового датчика угла прецессии этого гироблока.
При этом алгоритм определения азимута платформы строится на основе полной динамической модели гироскопа, имеющей следующий вид:

где I - момент инерции гироскопа;
f - коэффициент демпфирования;
Н - кинетический момент;
A0 - начальный азимут платформы;
α - угол поворота платформы относительно Земли;
ωГ - горизонтальная составляющая угловой скорости вращения Земли;
β - угол прецессии гироскопа;
ωГБ - скорость собственного ухода измерительного гироскопа;
Мвр - возмущающие воздействия, обусловленные влиянием нескомпенсированной скорости дрейфа платформы относительно вертикальной оси из-за наличия ошибок горизонтирования платформы ТГС.
Платформа ТГС «свободна в азимуте» относительно Земли по вертикали.
Полученное выражение позволяет решать задачу автономного азимутального ориентирования платформы по информации об угле прецессии гироблока без установки на платформу дополнительных измерителей.
Недостатком данного способа является сложность алгоритма определения азимута платформы ТГС во время проведения измерений. Действительно, данное дифференциальное уравнение нелинейно и не имеет аналитического решения. Определить с высокой точностью на основе данного уравнения искомый азимут в условиях действия на двухстепенной гироскоп различных внешних и внутренних возмущений: ωГБ, Мвр, имеющих случайную природу, весьма затруднительно.
Как следует из сути данного способа, использование широкодиапазонного датчика угла предполагает, что в начальный момент функционирования системы угол между вектором кинетического момента гироблока 
На фиг.1 представлена структурная схема типового трехосного гиростабилизатора в начальный момент (β(0)=0) измерения азимута платформы, где обозначено:
Гx, Гy, Гz - двухстепенные гироблоки системы стабилизации относительно соответствующих осей;
Ax, Az - акселерометры систем горизонтирования относительно соответствующих осей;
СДх, СДy, СДz - стабилизационные двигатели относительно соответствующих осей;
УСх,УСy,УСz - усилители систем стабилизации относительно соответствующих осей;
КК - корректирующий контур;
OXпYпZп - система координат, связанная с платформой;
ON - направление на север;
ВУ - вычислительное устройство;
А - азимут оси ХП платформы ТГС в момент начала измерений.
Здесь в качестве измерительного гироблока используется гироблок Гх.
Первый член в правой части уравнения (1) является гироскопическим моментом, и в соответствии с определением гироскопического момента
[2, с.117] начальный азимут A0 - это угол между векторами

если за начальный азимут А принять начальный азимут оси ХП платформы ТГС.
Целью настоящего изобретения является разработка способа, позволяющего повысить точность и сократить время определения азимута платформы ТГС в условиях действия различных возмущений.
Поставленная цель достигается тем, что одновременно со считыванием информации с широкодиапазонного кодового датчика угла измерительного гироблока рассчитываются номинальные значения данного угла в соответствии с уравнением номинального движения, а азимут платформы определяют по информационным сигналам, равным разности между номинальными значениями угла прецессии гироблока и соответствующими значениями широкодиапазонного кодового датчика угла этого гироблока.
Номинальные значения угла прецессии гироблока βН определяются в соответствии с нелинейным дифференциальным уравнением номинального движения:

где ωВ - вертикальная составляющая угловой скорости вращения Земли.
Данное уравнение описывает изменение угла βН при действии гироскопического момента, обусловленного горизонтальной составляющей угловой скорости Земли ωГ, в предположении, что в начальный момент времени ось ХП платформы ТГС направлена точно на север, а направление оси чувствительности измерительного гироблока совпадает с направлением оси ХП, то есть при t=0: A=0, β=0 и α(0)=-ωВt=0. При этом вредные возмущения Мвр отсутствуют.
Номинальные значения угла прецессии гироблока βН в соответствии с (3) могут быть рассчитаны одним из численных методов, например методом Рунге-Кутта [3]. В этом случае уравнение (2) можно линеаризовать относительно уравнения (3) и использовать для определения начального азимута А оси ХП платформы ТГС хорошо известные методы оценок параметров линейных систем в условиях действия случайных возмущений, например оптимальный фильтр Калмана [4].
После определения начального азимута А оси ХП платформы ТГС можно определить также текущий азимут платформы:

Таким образом, предложенный способ имеет новизну.
Сравнительный анализ существенных признаков ближайшего аналога [1] и настоящего способа показывает, что азимутальная ориентация платформы трехосного гиростабилизатора по приращениям угла прецессии гироблока отличается тем, что одновременно со считыванием информации об угле прецессии измерительного гироблока рассчитывают номинальные значения данного угла в соответствии с уравнением номинального движения, а азимут платформы определяют по информационным сигналам, равным разности между номинальными значениями угла прецессии гироблока и соответствующими значениями широкодиапазонного кодового датчика угла этого гироблока.
Источники информации
1. Камкин Е.Ф., Макаров Д.В., Ржевский С.И. Патент 2324897 С1 РФ, МПК G01C 21/18 «Азимутальная ориентация платформы трехосного гиростабилизатора по углу прецессии гироблока». 2006142185/28. Заяв. 29.11.2006. Опубл. 20.05.2008. Бюл. №14.
2. Командно-измерительные приборы. Под редакцией Б.И.Назарова. М.: МО СССР, 1987.
3. Дьяконов В.П. MATLAB 7.*/R2006/R2007. Самоучитель. М.: ДМК Пресс, 2008.
4. Свешников А.А., Ривкин С.С. Вероятностные методы в прикладной теории гироскопов. М.: Наука, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2016 |
|
RU2630526C1 |
| Способ калибровки гироблоков платформы трехосного гиростабилизатора | 2020 |
|
RU2757854C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2018 |
|
RU2700720C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПОВОРОТА КОРПУСА ГИРОБЛОКА | 2012 |
|
RU2513631C1 |
| Способ определения азимута платформы трёхосного гиростабилизатора по отклонению угла поворота гироскопа от расчётного значения | 2016 |
|
RU2649063C1 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА НА ПОДВИЖНОМ ОСНОВАНИИ | 2013 |
|
RU2541710C1 |
| Способ определения азимута трёхосного гиростабилизатора по углу поворота гироскопа | 2020 |
|
RU2729515C1 |
| Способ калибровки систематической составляющей угловой скорости дрейфа поплавкового гироскопа | 2024 |
|
RU2829458C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПРЕЦЕССИИ ГИРОБЛОКА | 2006 |
|
RU2324897C1 |
| Способ определения азимута платформы трёхосного гиростабилизатора по измерению угла поворота одного из гироскопов | 2023 |
|
RU2841320C2 |
Азимутальная ориентация платформы трехосного гиростабилизатора по приращениям угла прецессии гироблока относится к области приборостроения и может быть использована для определения азимута, например, в высокоточных системах различного назначения. Технический результат - повышение точности и сокращение времени определения азимута базового направления, связанного с платформой трехосного гиростабилизатора. Для достижения данных целей используется один из гироблоков системы стабилизации гиростабилизированной платформы, при этом горизонтирование платформы относительно одной из осей осуществляется путем отключения акселерометра от датчика моментов гироблока системы стабилизации по этой оси и подключения его к соответствующему двигателю стабилизации через усилитель стабилизации. Перед началом измерений одну из осей, связанных с платформой трехосного гиростабилизатора, грубо приводят по азимуту к меридиану. Одновременно со считыванием информации с широкодиапазонного кодового датчика угла гироблока рассчитываются номинальные значения данного угла в соответствии с уравнением номинального движения, а азимут оси чувствительности гироблока определяют по информационным сигналам, равным разности между номинальными значениями угла прецессии гироблока и соответствующими значениями датчика угла этого гироблока. 1 ил.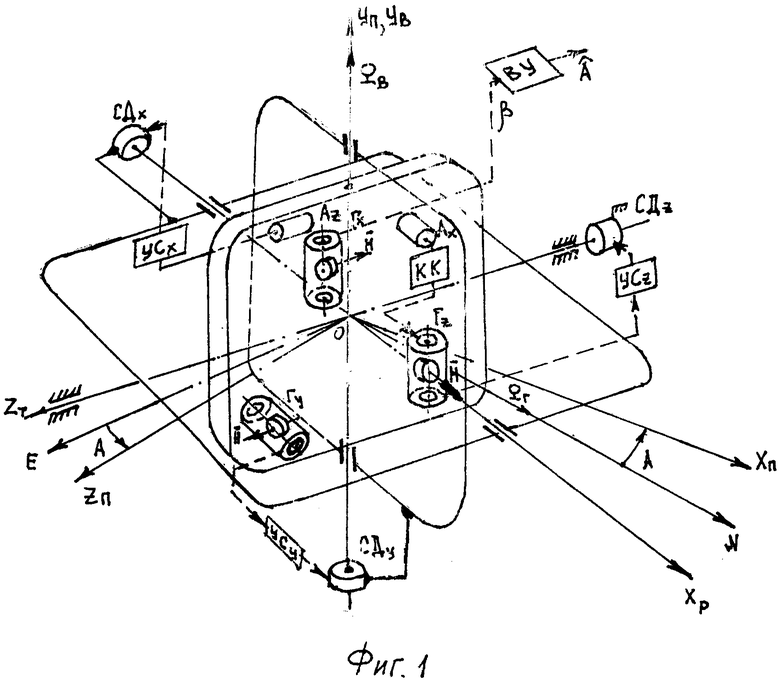
Азимутальная ориентация платформы трехосного гиростабилизатора по приращениям угла прецессии гироблока, заключающаяся в том, что используют один из гироблоков системы стабилизации гиростабилизированной платформы, при этом горизонтирование платформы относительно одной из осей осуществляют путем отключения акселерометра от датчика моментов гироблока контура стабилизации по этой оси и подключения его к соответствующему двигателю стабилизации через усилитель стабилизации, а информацию считывают с широкодиапазонного кодового датчика угла этого гироблока, отличающаяся тем, что одновременно со считыванием информации рассчитывают номинальные значения данного угла в соответствии с уравнением номинального движения, а азимут платформы определяют по информационным сигналам, равным разности между номинальными значениями угла прецессии гироблока и соответствующими значениями широкодиапазонного кодового датчика угла этого гироблока.
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПРЕЦЕССИИ ГИРОБЛОКА | 2006 |
|
RU2324897C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| RU 2060463 C1, 20.05.1996 | |||
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 1995 |
|
RU2107897C1 |
| US 4125799 А1, 14.11.1978. | |||

