Настоящее изобретение касается авиационной техники, а именно систем предупреждения пилота о возможности сваливания и других опасных режимах полета, и может применяться на самолетах и планерах различного назначения, преимущественно легкой и сверхлегкой категорий, в том числе адаптированных для первоначального обучения пилотированию и эксплуатации пилотами-любителями. Изобретение относится к рубрике B64D 45/00 МКИ.
Из уровня техники известны два подхода к решению проблемы предупреждения о возможности сваливания.
В простейшем случае на летательный аппарат устанавливается указатель воздушной скорости, который отображает величину скоростного напора в пересчете на истинную скорость на уровне моря. Как правило, на шкалу указателя скорости нанесены цветные или монохромные метки, обозначающие скорость сваливания Vst и максимально допустимую скорость Vmax, определяемую с учетом запаса прочности и жесткости конструкции, которую в современной литературе также обозначают сокращением Vne.
Преимуществом указателя скорости как средства предупреждения сваливания является возможность заблаговременной оценки возможности опасного снижения или превышения воздушной скорости, так как перед сваливанием активное падение скорости в какой-то мере предшествует активному росту угла атаки. Это происходит потому, что на фоне линейной потери скорости угол атаки прирастает нелинейно и тем сильнее, чем ближе момент выхода на Vst.
Основным недостатком стандартного указателя скорости в качестве средства предупреждения сваливания является необходимость длительного отвлечения внимания пилота. Очевидно, что единовременный короткий перенос внимания на указатель скорости не дает представления о динамике процесса изменения воздушной скорости, так как за короткий промежуток времени (в среднем 0,25 с) средний пилот не способен уловить потенциально опасный темп снижения воздушной скорости при том, что текущее на момент считывания показаний указателя значение воздушной скорости может показаться пилоту безопасным.
Поэтому в силу необходимости отвлечения на контроль пространственного положения самолета, контроль других параметров по приборам, поддержание радиообмена другие вопросы пилот чаще всего не может задерживать взгляд на указателе скорости так долго или переносить так часто, как это необходимо для правильной оценки тенденции продольной динамики летательного аппарата.
В качестве примера эффективного решения данной проблемы можно привести основной пилотажный индикатор самолета А320, изображение которого размещено, в частности, в сети Интернет по адресу http://meriweather.com/fliqhtdeck/320/fwd/pfcl1.html.
Важной особенностью данного устройства является отображение на столбце указателя скорости вертикально ориентированной стрелки, направление, размер и цвет которой дают пилоту необходимую информацию о тенденции изменения воздушной скорости наряду с ее текущим значением, отображаемым в цифровом виде.
Недостатком данного технического решения, как и других основных пилотажных индикаторов, является обилие разнородной информации, разобраться в которых в условиях дефицита времени сложнее, чем считать показания классических пилотажных приборов. Проблема дефицита времени на оценку показаний приборов характерна для малой авиации, где из-за малой массы летательных аппаратов переходные процессы происходят очень быстро.
Вторым подходом к решению проблемы предупреждения пилота является установка на летательный аппарат систем предупреждения об опасных режимах полета, основанных на считывании текущего или порогового угла атаки и имеющих средства оповещения с определенным порогом срабатывания.
Простейшим вариантом подобного решения можно считать устанавливаемый на поршневых самолетах Cessna энергонезависимый звуковой индикатор Stall Horn, взрыв-схема которого приводится в сети Интернет по адресу http://www.homebuiltairplanes.com/forums/attacriment.php?attachmentid=50097&d=1461581915.
Данный индикатор содержит вырез в передней кромке крыла, закрытый регулируемой пластиной с щелью и соединенный при помощи гибкой трубки с установленным в кабине пилота рожком. При выходе щели накладки из зоны стагнации потока вследствие достижения порогового угла атаки проходящий через щель воздух начинает создавать колебания звуковой частоты, передаваемые через трубку и рожок в ухо пилота.
Недостатком пороговой индикации критического угла атаки является то, что индикатор, по сути, лишь констатирует наличие на борту аварийной ситуации, что оставляет пилоту крайне мало времени на принятие правильного решения. В сущности, позднее срабатывание сигнализатора ограничивает эффективность предупреждения данного устройства случаями прямолинейного горизонтального полета на достаточной высоте, а также подсказки о достижении минимальной скорости выдерживания при посадке. В тоже время срабатывание Stall Horn в вираже при положительной перегрузке около 2,5g и крене 60 градусов на фоне тенденции к дальнейшему активному росту угла атаки практически не дает пилоту времени на осмысление ситуации и, по сути, лишь накладывается на срыв самолета в штопор, после чего писк рожка может помешать адекватным действиям на выводе.
При этом настройка данной системы на более раннее срабатывание приводит к многочисленным ложным срабатываниям системы при кратковременных повышениях угла атаки при эволюциях самолета, что вызывает у пилота дополнительный стресс и снижает его работоспособность.
В качестве примера более серьезного подхода к данной проблеме следует отметить широко распространенный на отечественных самолетах прибор АУАСП - автомат углов атаки и сигнализации перегрузок, описание которого приводится в сети Интернет по адресу http://studopedia.ru/16_71734_avtomat-uqlov-ataki-i-perearuzki-auasp.html.
Достоинством АУАСП является возможность коррекции предельного значения угла атаки по сигналам акселерометра и махметра, что исключает ложные срабатывания и позволяет использовать АУАСП на скоростных, в том числе сверхзвуковых самолетах.
Первым недостатком АУАСП является сложность считывания показаний двухстрелочного индикатора, поскольку в условиях дефицита времени интерпретировать положение его стрелок способен только хорошо тренированный пилот. Вторым недостатком АУАСП следует считать позднее срабатывание звуковой и световой сигнализации и работу сирены звуковой сигнализации в течение всего времени нахождения самолета в критическом режиме, что усиливает стресс экипажа и мешает ему действовать адекватно ситуации.
Известна также «Система оповещения о сваливании самолета», описание которой приводится в патенте США №4908619, дата публикации 13.03.1990, дата подачи 13.11.1984. Данная система предупреждения по своему техническому решению является ближайшим аналогом предложенного изобретения и содержит блок управления, по меньшей мере один датчик воздушной скорости и средства оповещения.
Достоинством такого решения является адаптивность системы предупреждения к специфике тяговооруженных самолетов с выраженной нижней децентрацией вектора тяги двигателей, при которой скорость сваливания в режиме полной тяги уменьшается из-за вертикальной составляющей силы тяги, увеличивающейся по мере роста угла тангажа, и резко увеличивается при сбросе тяги.
Недостатком данной системы помимо крайней технической сложности является также неспособность выдавать заблаговременное предупреждение о приближении опасного режима полета, так как данная система не учитывает в своей работе динамику изменения воздушной скорости.
Известен также «Способ предсказания приближения крыла самолета к режиму сваливания», описание которого приводится в патенте США №4,563,684, дата публикации 7.01.1986, дата подачи 3.10.1983.
Данный способ основан на одновременном измерении колебаний воздушной скорости в нескольких зона аэродинамического профиля, что позволяет сформировать соответствующий состоянию обтекания крыла выходной сигнал в виде отношения воздушной скорости к величинами ее колебаний в тех или иных зонах аэродинамического профиля крыла.
Недостатком данного способа является конструктивная сложность и дороговизна, а также позднее предупреждение о сваливании.
Известны также «Способ предупреждения о сваливании при полете с креном и устройство для реализации способа», описание которых приводится в патенте США №6169496, дата публикации 2.01.2001, дата подачи 9.12.1998.
Данный способ направлен на повышение безопасности полета, в том числе за счет решения одной из самых актуальных пилотажных задач - выбора между посадкой «перед собой» и разворотом с заходом на полосу при отказе двигателя на взлете, и основан на сравнении величин крена, скорости, высоты полета и других параметров, при этом алгоритм действия данной системы предусматривает оценку опасности известного угла крена с точки зрения скорости и высоты полета.
Недостатком данной системы является то, что при наличии крена наиболее важным параметром является не высота полета, а динамика воздушной скорости. Именно тенденция к активному падению воздушной скорости в сочетании с креном более 45 градусов чаще всего означает очень скорый срыв в штопор, тем более, что скорость сваливания растет вместе с Сх и перегрузкой. Кроме того, время активного приращения угла атаки до срывных значений в таких случаях исчисляется долями секунды, и даже наличие достаточного запаса высоты может не помочь при ошибочных или замедленных действиях пилота при выводе ЛА из сваливания или штопора.
Количество катастроф по причине сваливания, происходящих на типах ЛА, оборудованных указателями скорости и сигнализаторами порогового значения угла атаки, позволяет утверждать, что вышеописанные устройства как сами по себе, так и в сочетании друг с другом не могут рассматриваться как эффективные меры предупреждения сваливания и других опасных режимов полета, поскольку они либо требуют непрерывного слежения за каким-либо параметром по прибору, либо срабатывают настолько поздно, что лишь констатируют наличие критической ситуации. Выбор между этими средствами можно также определить как выбор между дефицитом внимания и дефицитом времени.
Таким образом, при разработке предложенной системы предупреждения была поставлена задача качественного повышения эффективности работы системы предупреждения о сваливании за счет использования в ней предиктивного алгоритма работы, основанного на анализе взаимосвязи трех базовых с точки зрения вероятности катастрофы параметров полета - воздушной скорости, динамики ее изменения и величины вертикальной перегрузки.
Дополнительной задачей было объединение в одном устройстве функций предупреждения об угрозе сваливания с функцией предупреждения о вероятном превышении максимально возможной скорости, а также предупреждения о попадании в нисходящую спираль за счет использования общего алгоритма для предупреждения различных по характеру аварийных ситуаций.
Дополнительной задачей было снижение стресса пилота при выводе ЛА из опасного режима полета за счет оптимизации алгоритма срабатывания средств оповещения.
Дополнительной задачей было обеспечение максимальной простоты и надежности устройства.
Цель изобретения - повышение безопасности полетов и упрощение обучения пилотированию самолетов и планеров.
Для достижения поставленной цели в известную конструкцию системы предупреждения, содержащую блок управления, по меньшей мере один датчик воздушной скорости и средства оповещения, были включены следующие конструктивные признаки: система предупреждения летательного аппарата выполнена с возможностью разделения сигнала датчика воздушной скорости на составляющие текущей воздушной скорости и приращения воздушной скорости на единицу времени, а также дополнительно содержит датчик вертикальной перегрузки, конструктивное исполнение блока управления обеспечивает включение средств оповещения при приближении летательного аппарата к критическим значениям воздушной скорости на основе сопоставления в рамках закона управления текущего соотношения сигналов воздушной скорости и приращения воздушной скорости на единицу времени с сигналом вертикальной перегрузки, при этом в соответствии с законом управления при одном и том же значении воздушной скорости более раннему моменту включения средств оповещения соответствуют более быстрое приближение летательного аппарата к одному из критических значений воздушной скорости и большая величина вертикальной перегрузки.
Кроме того, блок управления содержит главный вычислитель, а средства разделения сигнала датчика воздушной скорости на составляющие текущей воздушной скорости и приращения воздушной скорости на единицу времени выполнены в виде делителя сигнала воздушной скорости.
Кроме того, система предупреждения летательного аппарата дополнительно содержит датчик положения закрылков, конструктивно связанный с блоком управления с возможностью коррекции момента включения средств оповещения исходя из изменения скорости сваливания и максимально допустимой скорости при изменении положения закрылков.
Кроме того, система предупреждения летательного аппарата дополнительно содержит датчик угла атаки, конструктивно связанный с блоком управления, при этом конструктивное исполнение блока управления обеспечивает периодическое вычисление расчетного значения угла атаки и более раннее включение средств оповещения в том случае, если фактический угол атаки превышает расчетное значение.
Кроме того, система предупреждения летательного аппарата дополнительно содержит датчик или датчики углов крена и тангажа, при этом конструктивное исполнение блока управления обеспечивает более раннее включение средств оповещения при увеличении суммы углов крена и тангажа.
Кроме того, конструктивное исполнение блока управления обеспечивает включение средств оповещения при достижении критического значения одного из сигналов независимо от количественного соотношения других сигналов.
Кроме того, конструктивное исполнение блока управления обеспечивает возможность частичного или полного отключения средств оповещения при превышении предельных значений одного или нескольких сигналов.
Кроме того, средства оповещения представляют собой произвольное сочетание средств звуковой и световой сигнализации, а также речевого информатора и механизма тряски органа управления, при этом средства оповещения установлены с возможностью одновременного или последовательно включения.
Кроме того, конструктивное исполнение блока управления и средств оповещения обеспечивает подачу различных по характеру сигналов средств речевой, звуковой и световой сигнализации при попадании летательного аппарата в те или иные неблагоприятные режимы полета или приближении к ним.
Благодаря введенным конструктивным признакам повышается безопасность полетов за счет заблаговременного оповещения пилота о вероятном приближении к опасному режиму полета.
Устройство согласно изобретению иллюстрируется чертежами, на которых обозначено:
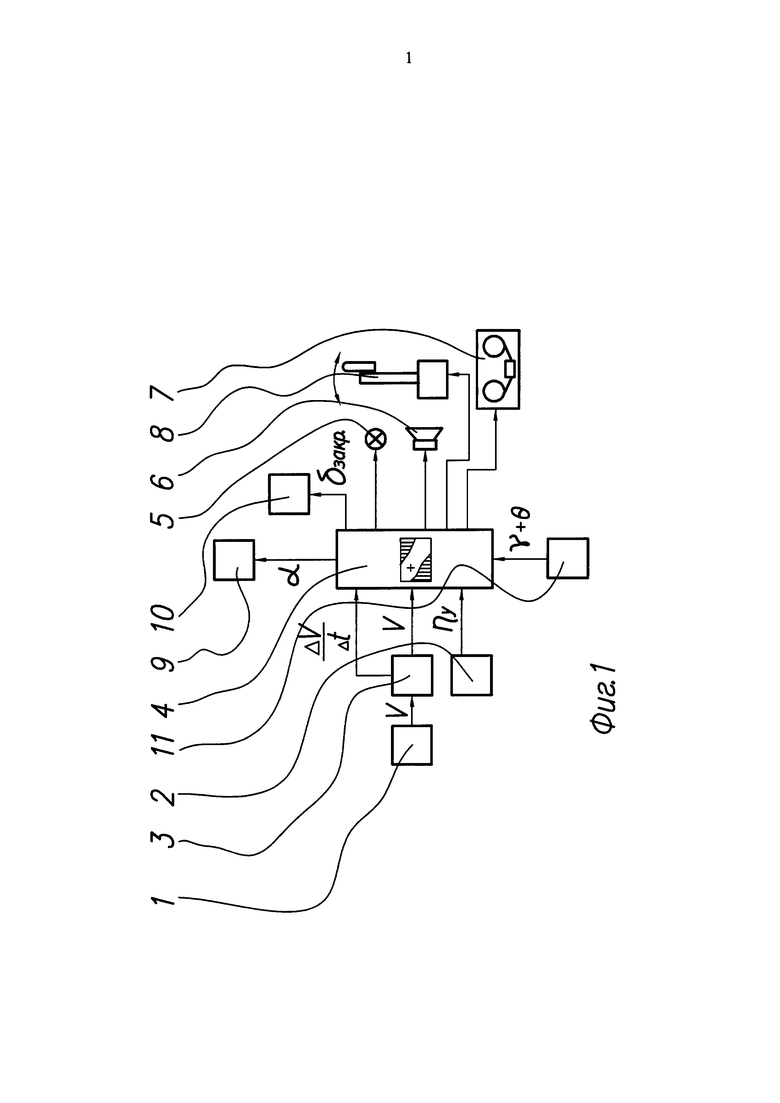
на Фиг. 1 - структурная схема системы предупреждения летательного аппарата;
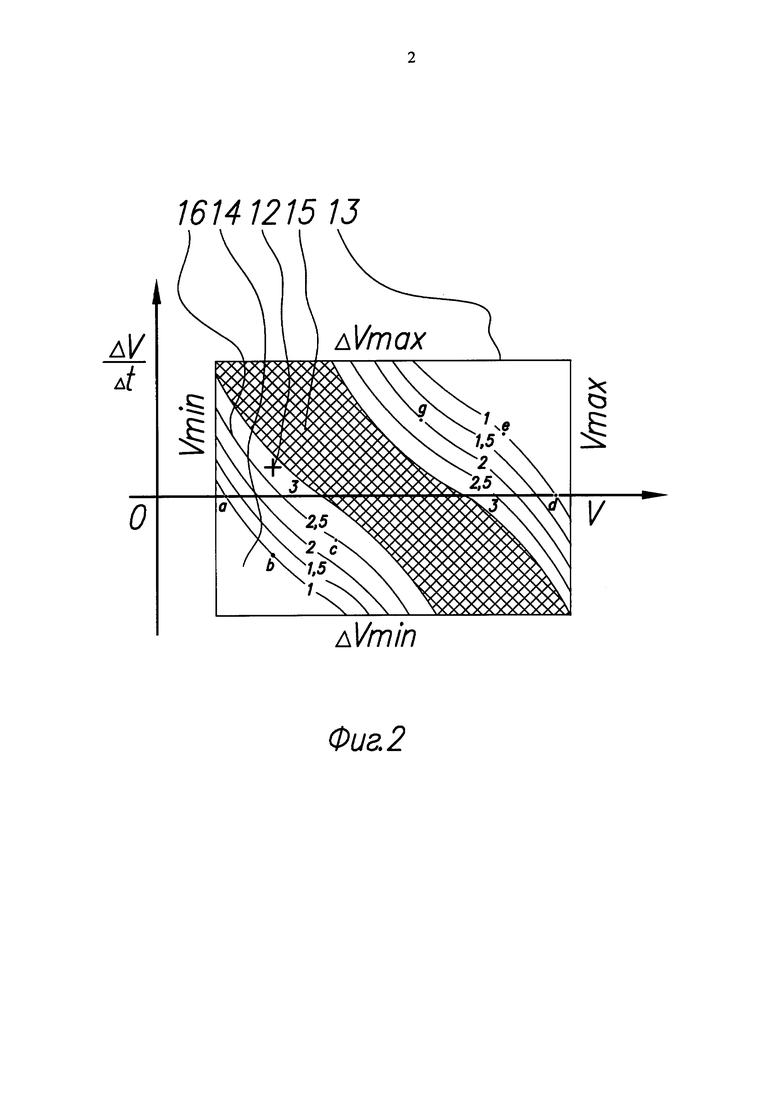
на Фиг. 2 - диаграмма моментов включения средств оповещения.
Устройство согласно изобретению содержит датчик воздушной скорости (1), датчик вертикальной перегрузки (2), блок управления, включающий в себя делитель сигнала воздушной скорости (3) и главный вычислитель (4), и средства оповещения, включающие в себя средства световой индикации (5), средства звуковой индикации (6), речевой информатор (7) и механизм тряски органа управления (8).
При этом датчик вертикальной перегрузки (2) и средства оповещения непосредственно связаны с вычислителем (4), а датчик воздушной скорости (1) связан с главным вычислителем (4) через делитель сигнала воздушной скорости (3). Возможно также опциональное оснащение устройства связанными с главным вычислителем (4) датчиком угла атаки (9), датчиком положения закрылков (10) и датчиком пространственного положения (11).
Закон управления, обеспечивающий включение средств оповещения, соответствует диаграмме, изображенной на Фиг. 2. Диаграмма содержит систему координат, в которой расположены курсор (12), положение которого соответствует соотношению V/дельта V, и прямоугольник (13), образованный предельными для предиктивного алгоритма работы устройства величинами параметров воздушной скорости и приращения воздушной скорости. Внутри площади прямоугольника расположены зоны срабатывания (14) и зона ожидания (15). При этом в зонах оповещения отображены изолинии (16), соответствующие смещению границы зоны срабатывания (14) при изменении вертикальной перегрузки в процессе полета.
Работа блока управления основана на двух параллельных процессах: разделении сигнала датчика или датчиков воздушной скорости (1) на составляющие V/дельта V, которое производится в делителе сигнала воздушной скорости (3), и вычисление моментов включения и выключения средств оповещения, производимое в вычислителе (4) на основе закона управления.
Система предупреждения летательного аппарата может работать в рамках двух возможных алгоритмов.
В случае если ни один из базовых параметров, используемых в работе системы предупреждения летательного аппарата, не достигает предельного значения, а курсор (12) находится внутри прямоугольника (13), система предупреждения работает по предиктивному алгоритму. В первую очередь следует отметить, что при любом положении курсора в пределах зоны ожидания (15) никаких предупредительных сигналов не подается, так как полет летательного аппарата при соотношениях V/дельта V, заданных формой зоны ожидания (15), относительно безопасен. При этом диагональная форма зоны ожидания (15) подразумевает, что при малых скоростях полета наиболее безопасен разгон воздушной скорости, а при близких к предельно допустимым - ее гашение.
Срабатывание средств оповещения происходит при перемещении курсора (12) из зоны ожидания в одну из зон срабатывания (14), площадь которых увеличивается при увеличении вертикальной перегрузки и уменьшается при ее уменьшении в соответствии с расположением изолиний (16).
Рассмотрим шесть случаев включения средств оповещения, соответствующих точкам a-g диаграммы.
1. При наиболее медленном приближении к минимально возможной скорости (дельта V близка к нулю) в горизонтальном полете при перегрузке, равной единице, пилот получает предупреждение, когда курсор (11) в левой зоне срабатывания (14) пересекает изолинию (16), соответствующую вертикальной перегрузке в одну единицу, что происходит в точке (а) диаграммы. Данная ситуация соответствует приближению к сваливанию с постепенным гашением скорости в горизонтальном полете - это идеализированный случай, который на практике может означать либо окончание процесса гашения горизонтальной скорости на выдерживании, либо отработку полета на минимально возможной скорости или режима сваливания в процессе обучения пилотированию. Таким образом, пилот в этом случае ждет именно возможного сваливания, и более раннее предупреждение может его дезориентировать.
2. Второй случай соответствует вероятности сваливания на тяге в наборе высоты при избыточном угле тангажа, но при перегрузке, равной единице. Очевидно, что при недопустимом уменьшении скорости в наборе высоты отрицательная величина дельта V больше, чем при отработке сваливания в горизонтальном полете, что приведет к более раннему срабатыванию средств оповещения, соответствующему точке (b) на диаграмме. При этом в момент выдачи системой предупредительного сигнала летательный аппарат будет находиться в полетном положении на докритических углах атаки и иметь минимально достаточный запас по скорости, что дает возможность пилоту плавно уменьшить угол тангажа и тем самым выйти из опасной ситуации.
3. В качестве третьего случая рассмотрим выполнение глубокого виража с большой перегрузкой при недостатке или отсутствии (отказ или его имитация) мощности двигателя. В этом случае блок управления распознает быстрый темп потери скорости, в соответствии с которым включение средств оповещения происходит на гораздо большей, чем в идеальном случае, скорости, поскольку поправка на темп потери скорости в вычислителе (4) суммируется с поправкой на перегрузку, что соответствует точке (с) на диаграмме. Графически это выглядит как встречное движение курсора (12) и границы зоны срабатывания (14) на диаграмме.
В реальности суммирование поправок на темп потери скорости и на перегрузку приводит к предиктивному срабатыванию средств оповещения непосредственно после ввода в рискованный маневр, что также оставляет пилоту достаточно времени для уменьшения перегрузки, устранения избыточного крена, тангажа и добавления тяги.
4. В качестве четвертого случая рассмотрим превышение максимально разрешенной скорости в горизонтальном полете. В этом случае срабатывание средств оповещения также будет максимально поздним, поскольку темп набора скорости (дельта V) при приближении к максимально допустимой скорости будет минимальным. Данная ситуация соответствует точке (d) на диаграмме.
5. В качестве пятого случая рассмотрим ситуацию ввода ЛА в пикирование. В данной ситуации момент срабатывания средств оповещения в рамках предиктивного алгоритма будет определяться интенсивностью разгона скорости, зависящего при прочих равных условиях от мощности двигателя и величины отрицательного угла тангажа. В любом случае большей потенциальной опасности превышения Vmax будет соответствовать более раннее оповещение пилота. При некоем усредненном значении дельта V данная ситуация соответствует точке (е) на диаграмме, при этом данный момент срабатывания позволяет пилоту уменьшить мощность и убрать отрицательный тангаж с целью предотвращения дальнейшего разгона скорости.
6. В качестве шестого случая рассмотрим самопроизвольный (потеря пространственной ориентировки или ошибка при намеренном вводе в штопор) либо намеренный вход летательного аппарата в нисходящую спираль, которая считается одним из наиболее опасных режимов полета из-за быстрой потери высоты, связанной с разгоном скорости и ростом вертикальной перегрузки. В данном случае работа системы предупреждения согласно изобретению аналогична ситуации с вводом в форсированный вираж с дефицитом силы тяги - происходит суммирование поправок на вертикальную перегрузку и темп набора скорости, то есть встречное движение курсора (12) и границы правой зоны срабатывания (14), что обеспечивает максимально раннее оповещение пилота о крайне опасном режиме полета, а момент включения средств оповещения соответствует точке (g) на диаграмме.
В случае если система предупреждения дополнительно оснащена датчиком угла атаки (9), главный вычислитель (4) исходя из соотношения воздушной скорости и вертикальной перегрузки непрерывно высчитывает базовый угол атаки и сравнивает его с фактическим углом атаки, считываемым с датчика угла атаки (9). В случае если фактический угол атаки окажется выше расчетного, что может произойти, например, из-за большей высоты над уровнем моря, меньшей плотности воздуха из-за высокой температуры или увеличения взлетного веса ЛА, происходит смещение левой зоны срабатывания (14) вправо, что соответствует более раннему срабатыванию средств оповещения и более «строгой» настройке системы предупреждения, что повышает безопасность полетов в различных условиях.
Если же фактический угол атаки окажется ниже расчетного, левая зона срабатывания (14) может быть сдвинута влево, что соответствует более позднему срабатыванию средств оповещения.
В случае если система предупреждения оборудована датчиком положения закрылков (10), то каждому положению закрылков будет соответствовать свое положение левой и правой зон срабатывания (14), при этом при выпуске закрылков и левая, и правая зоны срабатывания (14) сдвигаются влево и одновременно с этим сдвигаются влево границы параметров Vmin и Vmax. Данное техническое решение необходимо при наличии у ЛА закрылков или других элементов, изменяющих величину Су крыла, так как оно уменьшает вероятность ложного срабатывания системы предупреждения на взлете и при посадке и уменьшает вероятность разрушения закрылков из-за избыточного скоростного напора.
В случае если система предупреждения оснащена датчиком пространственного положения (11), то левая зона срабатывания (14) сдвигается вправо относительно системы координат при увеличении суммы углов крена и положительного угла тангажа, а правая зона срабатывания (14) сдвигается влево относительно системы координат при увеличении суммы углов крена и отрицательного угла тангажа. Данное техническое решение также повышает предиктивность системы предупреждения, поскольку ускоряет встречное движение курсора (12) и границы зоны предупреждения (14).
Важно также отметить, что предиктивный алгоритм работы системы предупреждения существенно снижает требования к точности определения самого момента сваливания, что резко упрощает и удешевляет предложенное техническое решение относительно известных мультипараметрических систем предупреждения о сваливании и одновременно делает возможным применение предложенного технического решения на легких и сверхлегких летательных аппаратах, обладающих малой инерцией и склонных к быстрой потере воздушной скорости, в том числе предназначенных для первоначального обучения и эксплуатации пилотами-любителями.
Кроме того, дополнительным преимуществом предиктивной системы предупреждения является эффект привития пилоту навыков плавного, «консервативного» пилотирования, что также может повысить безопасность полетов.
Работа системы предупреждения по аварийному алгоритму происходит следующим образом:
1. При превышении максимально допустимой вертикальной перегрузки происходит включение средств оповещения, в том числе с выдачей специального речевого сигнала «предельная перегрузка», при этом соотношения других сигналов вычислителем (4) во внимание не принимаются.
2. При превышении пороговых значений приращения воздушной скорости на единицу времени происходит включение средств оповещения, в том числе с выдачей речевых сигналов «разгон скорости» и «скорость падает», при этом соотношения других сигналов блоком управления во внимание не принимаются. При этом моменты включения средств оповещения соответствует пересечению курсором линий дельта Vmax и дельта Vmin на диаграмме.
3. При выходе воздушной скорости за предельные значения происходит включение средств оповещения, в том числе с выдачей речевых сигналов «разгон скорости» и «скорость падает», при этом соотношения других сигналов блоком управления во внимание не принимаются. При этом моменты включения средств оповещения соответствует пересечению курсором линий Vmax и дельта Vmin на диаграмме.
4. В случае если система предупреждения дополнительно оснащена датчиком угла атаки (9), при превышении максимально допустимого угла атаки происходит включение средств оповещения, в том числе с выдачей специального речевого сигнала «предельный угол атаки», при этом соотношения других сигналов блоком управления во внимание не принимаются.
5. В случае если система предупреждения оснащена датчиком пространственно положения (11), при превышении предельных углов крена и тангажа происходит включение средств оповещения, в том числе с выдачей специальных речевых сигналов «предельный угол тангажа» или «предельный угол крена», при этом соотношения других сигналов блоком управления во внимание не принимаются.
Возможна также работа системы предупреждения по «антипаническому» алгоритму, который является составной частью аварийного алгоритма, описан в п. 6 Формулы и отличается тем, что с целью снижения стресса и уменьшения вероятности панической реакции пилота на аварийную ситуацию при выходе величины одного или нескольких сигналов за пределы расчетных значений, в частности при выходе ЛА на закритические углы атаки, происходит отключение части средств оповещения, а именно средств звуковой индикации (6), речевого информатора (7) и механизма тряски органа управления (8), с сохранением в работе средств световой индикации (5).
Таким образом, введение в известную систему предупреждения новых конструктивных признаков способствует повышению безопасности полетов за счет заблаговременного предупреждения пилота о потенциально опасных ситуациях и маневрах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СВАЛИВАНИЯ | 2017 |
|
RU2653414C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СКОЛЬЖЕНИЯ | 2020 |
|
RU2759370C1 |
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ И ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2667410C1 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2646691C2 |
| КРЫЛО С АЭРОДИНАМИЧЕСКОЙ ШТОРОЙ | 2016 |
|
RU2646686C2 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2645522C1 |
| ЭЛЕКТРОННЫЙ АВИАГОРИЗОНТ | 2017 |
|
RU2664789C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2630567C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
Система предупреждения летательного аппарата содержит блок управления с главным вычислителем, датчики воздушной скорости, средства оповещения, датчик вертикальной перегрузки, делитель сигнала воздушной скорости, датчики положения закрылков, датчик угла атаки, датчики углов крена и тангажа, соединенные определенным образом. Обеспечивается повышение безопасности полетов и упрощение обучения пилотированию. 8 з.п. ф-лы, 2 ил. 
1. Система предупреждения летательного аппарата, содержащая блок управления, по меньшей мере один датчик воздушной скорости и средства оповещения, отличающаяся тем, что выполнена с возможностью разделения сигнала датчика воздушной скорости на составляющие текущей воздушной скорости и приращения воздушной скорости на единицу времени, а также дополнительно содержит датчик вертикальной перегрузки, конструктивное исполнение блока управления обеспечивает включение средств оповещения при приближении летательного аппарата к критическим значениям воздушной скорости на основе сопоставления в рамках закона управления текущего соотношения сигналов воздушной скорости и приращения воздушной скорости на единицу времени с сигналом вертикальной перегрузки, при этом в соответствии с законом управления при одном и том же значении воздушной скорости более раннему моменту включения средств оповещения соответствуют более быстрое приближение летательного аппарата к одному из критических значений воздушной скорости и большая величина вертикальной перегрузки.
2. Система предупреждения летательного аппарата по п. 1, отличающаяся тем, что блок управления содержит главный вычислитель, а средства разделения сигнала датчика воздушной скорости на составляющие текущей воздушной скорости и приращения воздушной скорости на единицу времени выполнены в виде делителя сигнала воздушной скорости и конструктивно связаны с главным вычислителем.
3. Система предупреждения летательного аппарата по п. 1, отличающаяся тем, что содержит датчик положения закрылков, конструктивно связанный с блоком управления с возможностью коррекции момента включения средств оповещения исходя из изменения скорости сваливания и максимально допустимой скорости при изменении положения закрылков.
4. Система предупреждения летательного аппарата по п. 1, отличающаяся тем, что содержит датчик угла атаки, конструктивно связанный с блоком управления, при этом конструктивное исполнение блока управления обеспечивает периодическое вычисление расчетного значения угла атаки и более раннее включение средств оповещения в случае, если фактический угол атаки превышает расчетное значение.
5. Система предупреждения летательного аппарата по п. 1, отличающаяся тем, что содержит датчик или датчики углов крена и тангажа, при этом конструктивное исполнение блока управления обеспечивает более раннее включение средств оповещения при увеличении суммы углов крена и тангажа.
6. Система предупреждения летательного аппарата по п. 1, отличающаяся тем, что конструктивное исполнение блока управления обеспечивает включение средств оповещения при достижении критического значения одного из сигналов независимо от количественного соотношения других сигналов.
7. Система предупреждения летательного аппарата по п. 1, отличающаяся тем, что конструктивное исполнение блока управления обеспечивает возможность частичного или полного отключения средств оповещения при превышении предельных значений одного или нескольких сигналов.
8. Система предупреждения летательного аппарата по п. 1, отличающаяся тем, что средства оповещения представляют собой произвольное сочетание средств звуковой и световой сигнализации, а также речевого информатора и механизма тряски органа управления, при этом средства оповещения установлены с возможностью одновременного или последовательно включения.
9. Система предупреждения летательного аппарата по п. 8, отличающаяся тем, что конструктивное исполнение блока управления и средств оповещения обеспечивает подачу различных по характеру сигналов средств речевой, звуковой и световой сигнализации при попадании летательного аппарата в те или иные неблагоприятные режимы полета или приближении к ним.
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| Устройство для разгрузки зерна из бункера, например комбайна, в движущуюся тележку | 1959 |
|
SU122983A1 |
| Устройство для сигнализации предельных режимов работы | 1976 |
|
SU602976A1 |
| EP 3136197 A1, 01.03.2017 | |||
| US 9205931 B1, 08.12.2015. | |||

