[0001] Изобретение относится к области медицинского (диагностического) формирования изображений, а конкретнее к способу и системе для выделения структур высокого риска в виртуальном эндоскопическом изображении.
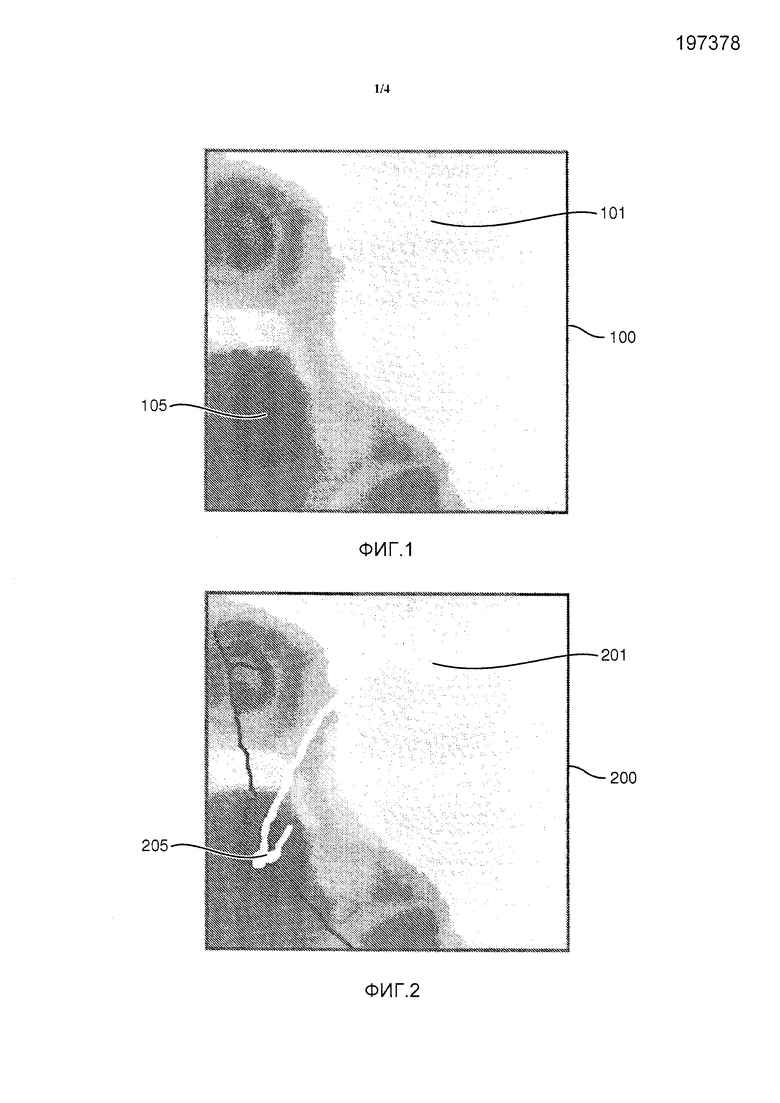
[0002] Бронхоскопии с трансбронхиальной биопсией или без нее являются распространенной интервенционной процедурой, в которой камера бронхоскопа продвигается в трахеобронхиальное дерево для диагностических, а при желании, и терапевтических целей. Бронхоскоп предоставляет изображение 100 изнутри бронха, как показано на фиг. 1. Однако бронхоскопия обычно страдает от проблемы в том, что передвижение в бронхиальном дереве является сложным для врача во время вмешательства. Врач может легко заблудиться и быть неспособным переместиться в положение, в котором он/она был изначально заинтересован. Чтобы помочь в планировании, а также в управлении таким вмешательством в реальном масштабе времени, предварительное торакальное компьютерное томографическое (КТ) сканирование пациента может использоваться для вычисления виртуальных эндолюминальных визуализаций 200, которые имеют близкое сходство с изображениями оптической камеры из настоящего бронхоскопа, как показано на фиг. 2. Виртуальная визуализация может совмещаться с текущим бронхоскопическим изображением. КТ сканирование, а также виртуальные эндолюминальные визуализации, выведенные из него, могут использоваться для генерирования виртуального "пролета" вмешательства и планирования пути к некоторой аномалии, опухоли, лимфатическому узлу, сужению дыхательных путей или т.п.
[0003] Виртуальный "пролет" генерирует изображения, как если бы врач находился внутри бронха, таким образом показывая только бронхиальное дерево, а конкретнее бронхиальную стенку изнутри бронха. Однако врача интересуют структуры, которые лежат за бронхиальной стенкой, в особенности структуры высокого риска, например крупные кровеносные сосуды. Эта информация особенно важна, когда врач планирует выполнить разрез через бронхиальную стенку, например для биопсии опухоли, или задание лимфатического узла. В этом случае врач обязан убедиться, что никакие другие (или по меньшей мере важные) структуры не задеваются, когда он/она выполняет разрез через бронхиальную стенку.
[0004] В настоящее время врач должен полагаться на его/ее экспертные знания о местоположении важных близлежащих структур при рассечении бронхиальной стенки. Однако это приводит только к приблизительной оценке местоположений важных близлежащих структур. Это не может предоставить точного местоположения и не может учесть изменения среди пациентов, а поэтому не может считаться очень надежным.
[0005] В качестве альтернативы врач может переместиться к предполагаемому положению в бронхе, а затем изменить настройку прозрачности для бронхиальной стенки. Одна проблема с этим подходом состоит в том, что врач не может передвигаться при низкой прозрачности, поскольку визуализация начинает вносить путаницу. Таким образом, врачу приходится неоднократно останавливаться, менять прозрачность и смотреть, присутствует ли структура. Кроме того, структуры нелегко увидеть в прозрачном представлении. Также нелегко определить расстояние до структуры в прозрачном представлении, или то, будет ли она задета при выполнении биопсии в той точке.
[0006] Настоящее изобретение предоставляет способ, систему и программный продукт для выделения структур высокого риска при виртуальной визуализации для использования во время интервенционной процедуры в просвете (полости) тела. С помощью выделения областей стенки просвета тела, которые находятся слишком близко к структуре высокого риска в виртуальной визуализации, врач, выполняющий вмешательство, может визуализировать области, где не безопасно выполнять разрез через стенку просвета. Виртуальная визуализация с выделением может быть представлена во время пролета перед выполнением вмешательства или во время вмешательства.
[0007] В соответствии с одним вариантом осуществления настоящего изобретения предоставляется способ для выделения структур высокого риска в виртуальной визуализации для использования во время интервенционной процедуры в просвете тела. Врач выполняет допроцедурное КТ сканирование просвета тела. Используя КТ сканирование, моделирующая программа сегментирует просвет тела и сегментирует структуру высокого риска. Моделирующая программа определяет относительные расстояния между просветом тела и структурой высокого риска и сравнивает расстояния с критериями маркировки. Моделирующая программа создает виртуальную визуализацию внутреннего пространства просвета тела, соответствующую интервенционному изображению с камеры; и маркирует области стенки просвета тела, соответствующие сравнению относительного расстояния с критериями маркировки.
[0008] В соответствии с одним вариантом осуществления маркируются области стенки просвета тела, которые находятся в пределах предопределенного расстояния от структуры высокого риска. Области стенки просвета тела могут маркироваться путем окрашивания предопределенным цветом вокселей в пределах предопределенного расстояния до структуры высокого риска.
[0009] В соответствии с одним вариантом осуществления можно использовать множество цветов для маркировки стенок просвета. В одном варианте осуществления множество цветов может использоваться для проведения различия между несколькими пороговыми значениями расстояния. Области стенки просвета тела окрашиваются в один из множества цветов, соответствующих расстоянию от структуры высокого риска до каждой соответствующей области, находящейся в одном из множества предопределенных пределов. В соответствии с другим вариантом осуществления множество цветов может использоваться для проведения различия, какая из множества структур является ближайшей к области стенки просвета тела. Область стенки просвета тела может окрашиваться в цвет, соответствующий одной из множества структур высокого риска в пределах предопределенного расстояния до области стенки просвета тела.
[0010] В соответствии с одним вариантом осуществления стенка просвета тела в виртуальной визуализации содержит множество вокселей. Каждый воксел стенки просвета тела окрашивается, если расстояние между вокселом и структурой высокого риска находится в пределах предопределенного порогового значения. В одном варианте осуществления воксели окрашиваются с полупрозрачным наложением, позволяя врачу визуализировать нижележащую стенку просвета тела.
[0011] В соответствии с одним вариантом осуществления точки на стенке просвета тела маркируются, если расстояние между точкой на стенке просвета тела и структурой высокого риска, измеренное под углом, с которым врач планирует выполнять разрез, находится в пределах предопределенного порогового значения.
[0012] В соответствии с одним вариантом осуществления просвет тела является трахеобронхиальным деревом. В альтернативных вариантах осуществления просвет тела может быть другим трубчатым органом, например толстой кишкой.
[0013] В соответствии с одним вариантом осуществления структура высокого риска является кровеносными сосудами. В соответствии с альтернативными вариантами осуществления можно идентифицировать другие органы высокого риска. Также могут маркироваться области стенки просвета тела в пределах порогового расстояния от целевых структур, таких как опухоли или лимфатические узлы.
[0014] В соответствии с одним вариантом осуществления настоящего изобретения предоставляется система для выделения структур высокого риска в виртуальной визуализации для использования во время интервенционной процедуры в просвете тела. Система содержит: процессор; память, функционально соединенную с процессором; и устройство отображения, функционально соединенное с процессором; где память содержит кодированную на ней моделирующую программу, которая выполняется процессором, чтобы сгенерировать виртуальную визуализацию просвета тела из допроцедурных сканирований, определить расстояние между просветом тела и структурой высокого риска, маркировать воксели на стенке просвета тела в виртуальной визуализации, которые находятся в пределах порогового расстояния от структуры высокого риска, и отобразить виртуальную визуализацию с маркировкой, чтобы выделить структуры высокого риска на устройстве отображения. Систему можно реализовать как рабочую станцию формирования изображений.
[0015] В соответствии с одним вариантом осуществления система дополнительно содержит эндоскоп, функционально подключенный к процессору, при помощи чего виртуальная визуализация может совмещаться с реальным эндоскопическим изображением, сгенерированным эндоскопом и представленным по одной стороне эндоскопического изображения.
[0016] В соответствии с одним вариантом осуществления настоящего изобретения предоставляется компьютерный программный продукт, содержащий невременные считываемые компьютером носители информации, имеющие кодированные на них: инструкции программы для выполнения КТ сканирования просвета тела; инструкции программы для сегментирования просвета тела; инструкции программы для сегментирования структуры высокого риска; инструкции программы для определения относительных расстояний между просветом тела и структурой высокого риска; инструкции программы для сравнения расстояний с критериями маркировки; инструкции программы для создания виртуальной визуализации внутреннего пространства просвета тела, соответствующей интервенционному изображению с камеры; и инструкции программы для маркировки областей стенки просвета тела, соответствующих сравнению относительного расстояния с критериями маркировки.
[0017] Признаки и преимущества изобретения станут понятнее из нижеследующего подробного описания предпочтительных вариантов осуществления при прочтении в связи с прилагаемыми чертежами:
[0018] Фиг. 1 - изображение из бронхоскопа в соответствии с известным уровнем техники;
[0019] Фиг. 2 - виртуальная визуализация трахеобронхиальных дыхательных путей в соответствии с известным уровнем техники;
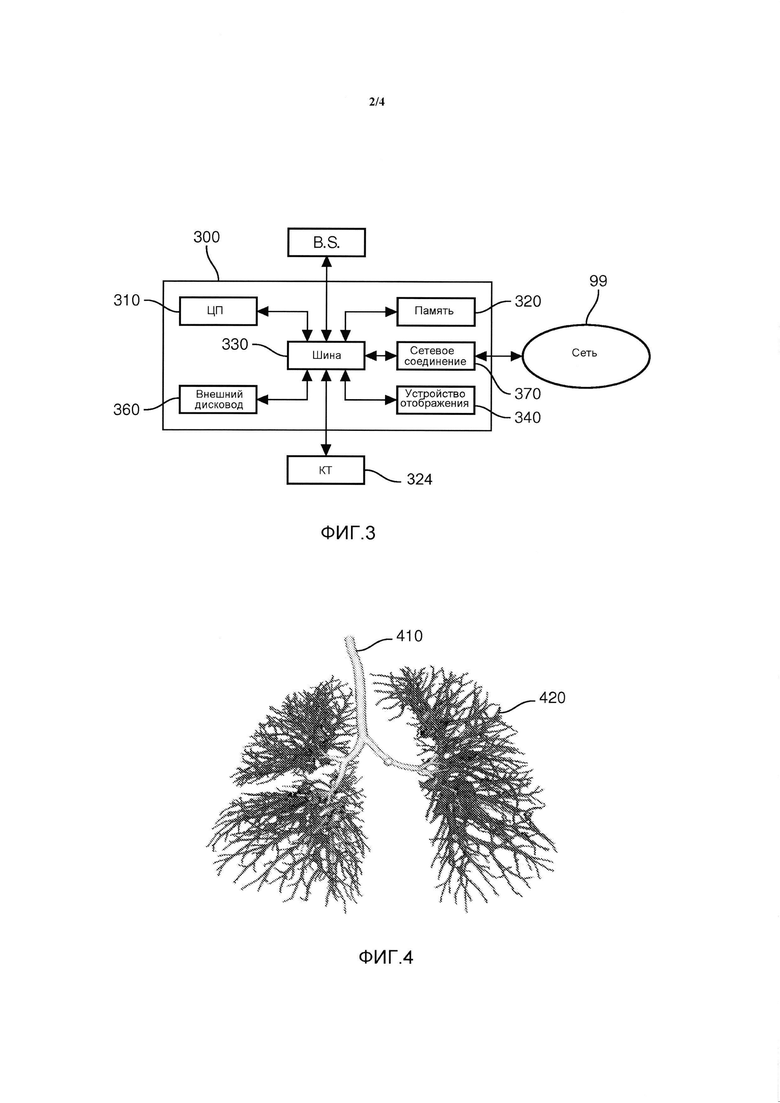
[0020] Фиг. 3 - блок-схема системы для маркировки областей бронхиальной стенки в виртуальной визуализации для указания близости к структуре высокого риска в соответствии с вариантом осуществления настоящего изобретения;
[0021] Фиг. 4 - изображение бронхиального дерева, сгенерированное из КТ сканирования, с изображением кровеносных сосудов, совмещенных с бронхиальным деревом в соответствии с различными вариантами осуществления настоящего изобретения;
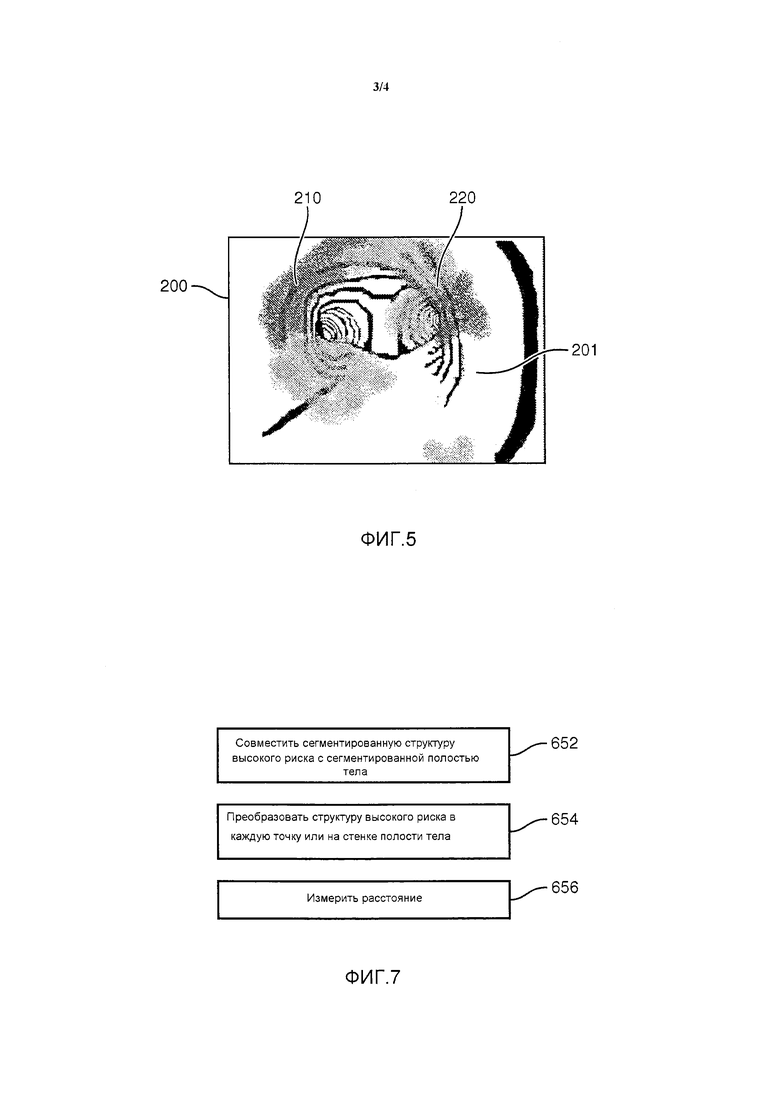
[0022] Фиг. 5 - виртуальное изображение бронха, маркированное для показа областей бронхиальной стенки, которые близки к структурам высокого риска, в соответствии с вариантом осуществления настоящего изобретения;
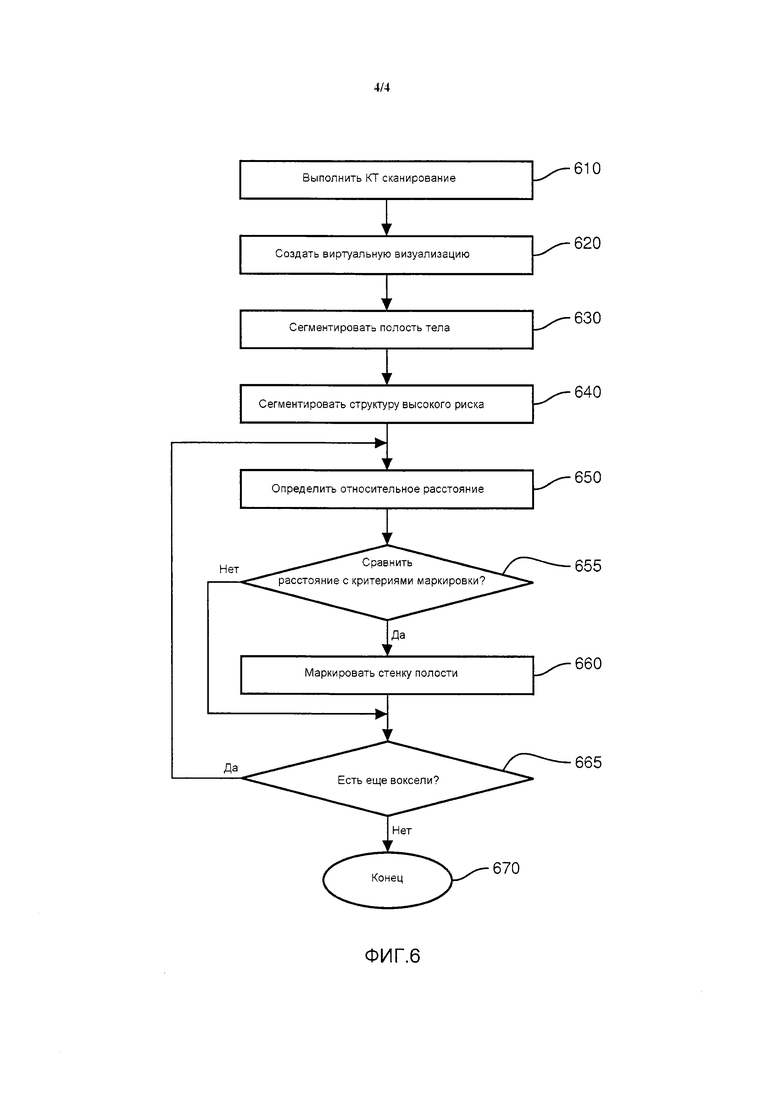
[0023] Фиг. 6 - блок-схема последовательности операций способа для маркировки областей бронхиальной стенки в виртуальной визуализации для указания близости к структуре высокого риска в соответствии с вариантом осуществления настоящего изобретения; и
[0024] Фиг. 7 - блок-схема последовательности операций способа для определения относительных расстояний между просветом тела и структурой высокого риска в соответствии с вариантом осуществления настоящего изобретения.
[0025] Настоящее изобретение предоставляет способ, систему и программный продукт для маркировки областей стенки просвета тела в виртуальной визуализации для указания близости к структуре высокого риска.
[0026] В соответствии с одним вариантом осуществления настоящего изобретения области стенки 201 просвета тела в виртуальной визуализации 200 маркируются для указания близости к структуре высокого риска, которая показана на фиг. 5. Маркированные области могут быть областями, которые находятся очень близко к структуре 210 высокого риска, делая разрез в этих областях слишком рискованным. Также могут маркироваться области 220, где безопасно осуществлять разрез. Области 210, 220 могут маркироваться, например, путем окрашивания стенки 201 просвета в подходящей области. Например, эти области могут окрашиваться с полупрозрачным наложением, которое имеет цветную маркировку, чтобы указывать тип области.
[0027] В настоящем изобретении релевантную информацию о близлежащих структурах можно легко получить непосредственно из виртуальной визуализации 200 путем наблюдения маркировок 210, 220, окрашенных на виртуальной визуализации 200. Маркировки могут предоставляться в виде необязательного наложения в пролетном применении без значительного взаимодействия с пользователем, всего лишь одно нажатие кнопки мыши может предоставить релевантную информацию близости. Таким образом, врач немедленно получает информацию близости близлежащих структур высокого риска и может легко определить, следует ли ему/ей выполнять разрез бронхиальной стенки 101 в конкретном положении.
[0028] Ссылаясь теперь на фиг. 3, показана система 300 для маркировки областей бронхиальной стенки в виртуальной визуализации, которые являются ближайшими структурами высокого риска. В соответствии с одним вариантом осуществления система 300 может быть реализована в рабочей станции формирования изображений, такой как Extended Brilliance Workspace (EBW) от Philips Electronics, N.V., Эйндховен, Нидерланды. EBW предоставляет графический интерфейс пользователя, который объединяет радионуклидное формирование изображений, например Однофотонную эмиссионную компьютерную томографию (SPECT), с Компьютерной томографией (КТ).
[0029] В соответствии с одним вариантом осуществления система 300 содержит универсальный компьютер или специальное вычислительное устройство. Система 300 содержит центральный процессор 310, который функционально соединен с памятью 320 посредством системной шины 330 или т.п. Процессор 310 может быть любым устройством, допускающим выполнение инструкций программы, например одним или несколькими микропроцессорами. Память может быть любым энергозависимым или энергонезависимым устройством памяти, например сменным диском, жестким диском, CD, оперативным запоминающим устройством (RAM), постоянным запоминающим устройством (ROM) или т.п., или любым их сочетанием.
[0030] Устройство 340 отображения также функционально подключено к процессору 310. Устройство отображения может быть любым монитором, экраном или т.п., подходящим для показа графического интерфейса пользователя (GUI), допускающего показ медицинских изображений.
[0031] Моделирующая программа кодируется в памяти 320. Моделирующая программа генерирует трехмерную модель анатомических особенностей из данных изображения, например сканирований КТ. Моделирующая программа также может создавать визуализацию анатомических особенностей с различных ракурсов, например визуализацию, которая имеет близкое сходство с представлением трахеобронхиального дерева изнутри воздушных путей, например, типа представления с камеры бронхоскопа. Моделирующая программа также может воспроизводить изображения других просветов тела изнутри тех просветов.
[0032] Моделирующая программа может идентифицировать структуры 420 высокого риска за пределами стенки 201 просвета тела. Затем моделирующая программа может определить расстояние от точки на стенке 201 просвета тела до структуры 420 высокого риска. Это расстояние сравнивается с одним или несколькими пороговыми значениями. Пороговые значения могут быть расстоянием, которое дает возможность врачу безопасно выполнить разрез через стенку просвета тела. Затем на основе сравнения расстояния с пороговым значением моделирующая программа окрашивает точку на стенке просвета тела в цвет, соответствующий пороговому значению риска, в пределах которого находится расстояние. Расстояние между точкой на стенке просвета тела и структурой высокого риска можно измерить под углом, с которым врач, скорее всего, осуществляет разрез. Определение расстояния может выполняться для каждой точки или воксела на стенке 201 просвета тела.
[0033] В соответствии с одним вариантом осуществления настоящего изобретения, допроцедурные КТ сканирования 324 кодируются в памяти 320 для использования в создании трехмерной анатомической модели. КТ сканирования 324 могут загружаться с устройства хранения, например CD-ROM или т.п., вставленного во внешний дисковод 360. В качестве альтернативы КТ сканирования 324 могут приниматься с помощью сетевого соединения 370 по сети 99, например Интернету или интранету, или т.п. Для выполнения этого внешний дисковод 360 или сетевое соединение 370 могут быть функционально подключены к памяти 320 через системную шину 330 или т.п. В качестве альтернативы система КТ может быть подключена непосредственно к памяти 320 через системную шину 330.
[0034] Ссылаясь теперь на фиг. 6, показан способ для маркировки областей бронхиальной стенки в виртуальной визуализации, которые являются ближайшими структурами высокого риска. Выполняется допроцедурное КТ сканирование 324 (этап 610). Сканирование 324 затем загружается в систему формирования изображений, например Philips EBW. Компьютерный томограф может составлять одно целое с системой формирования изображений и предоставлять срез напрямую. В качестве альтернативы сканирование может отправляться в систему формирования изображений по сети, или сканирование может записываться на носителях записи, например CD-ROM, флеш-накопитель или т.п., которые могут вставляться в подходящий дисковод или разъем в системе формирования изображений для доступа с помощью процессора 310.
[0035] Из КТ сканирования 324 система 300 формирования изображений создает виртуальную визуализацию 200 просвета 105 тела, например трахеобронхиального дерева, используя моделирующую программу (этап 620). Как описывалось ранее, виртуальная визуализация может создаваться процессором 310, выполняющим моделирующую программу, кодированную в памяти 320. Виртуальная визуализация отображается на устройстве 340 отображения.
[0036] Моделирующая программа сегментирует просвет 205 тела (этап 630) и сегментирует структуру высокого риска (этап 640). Как показано на фиг. 4, изображение сегментированного просвета 410 тела (в проиллюстрированном примере - бронхиального дерева) и структуры 420 высокого риска (в проиллюстрированном примере - кровеносных сосудов) совмещаются друг с другом отдельно от другой соседней структуры. Сегментированный просвет 410 тела и сегментированная структура 420 высокого риска могут генерироваться с использованием способов, известных в области медицинского формирования изображений.
[0037] Моделирующая программа определяет расстояние между точкой или вокселом на стенке 201 просвета тела и структурой высокого риска (этап 650) путем измерения расстояния между точкой на сегментированном просвете 410 тела и сегментированной структурой 420 высокого риска на виртуальном изображении. Моделирующая программа измеряет расстояния до структуры высокого риска для каждой точки на стенке просвета тела. Измерение расстояний на виртуальных изображениях известно в данной области техники и не будет дополнительно обсуждаться в этом документе. Следует понимать, что в некоторых вариантах осуществления расстояние может измеряться под заранее установленным углом - углом, соответствующим углу разреза, запланированному врачом.
[0038] Система 300 сравнивает измеренное расстояние между стенкой 201 просвета тела и структурой высокого риска с критериями маркировки (этап 655). Критерии маркировки могут быть одним или несколькими пороговыми значениями для расстояний, при которых безопасно выполнять разрез через стенку 201 просвета тела. Например, пороговое значение может устанавливаться в 5 миллиметров в одной интервенционной процедуре. Если измеренное расстояние от точки или воксела на стенке просвета тела до структуры высокого риска меньше порогового значения, то система 300, например, маркирует точку или воксел путем окрашивания наложения на нее (этап 660). Несколько пороговых значений могут использоваться для указания меняющихся степеней риска. Наложение может иметь цветную маркировку для указания порогового значения, которое применяется в той точке. В качестве альтернативы наложение может иметь цветную маркировку для указания одной из множества структур высокого риска или даже намеченной цели, например опухоли или лимфатического узла, представляющих интерес. Кроме того, наложение может быть полупрозрачным, чтобы предоставить врачу возможность визуализировать нижележащую стенку просвета.
[0039] Пороговое значение для маркировки стенки 201 просвета связано с конкретным применением и зависело бы от таких факторов, как размер инструмента, используемого в интервенционной процедуре. В одном примере пороговое значение устанавливается в 5 миллиметров, измеренных под углом разреза. Соответственно моделирующая программа определяет расстояние от каждого воксела на стенке просвета до структуры 420 высокого риска, измеренное под углом разреза. Если расстояние больше 5 миллиметров под углом разреза для первого воксела, то тот воксел не окрашивается. Если расстояние, измеренное от второго воксела под углом разреза, меньше 5 миллиметров, то тот воксел окрашивается, облегчая врачу выполнение интервенционной процедуры, чтобы визуализировать, где структура высокого риска находится ближе 5 миллиметров от стенки просвета, измеренной под углом разреза.
[0040] Если измеренное расстояние для текущего воксела не соответствует пороговым критериям, то текущий воксел не маркируется, и система переходит к этапу 665 для определения, есть ли еще воксели на стенке 201 просвета тела.
[0041] После того как сравнивается измеренное расстояние в одной точке, система 300 определяет, имеются ли дополнительные точки на стенке 201 просвета (этап 665). Если имеются дополнительные воксели на стенке 201 просвета тела, то система повторяет определение относительного расстояния (этап 650), сравнение измеренного расстояния с критериями маркировки (этап 655) и маркировку воксела (этап 660), если необходимо, для следующего воксела.
Эти этапы повторяются, пока все воксели не измерены, сравнены и маркированы.
[0042] Если нет дополнительных точек, то процесс завершается (этап 670). Виртуальная визуализация с маркировками для показа близости структур высокого риска показана на устройстве 340 отображения. Это изображение может использоваться для пролета процедуры и может быть показано рядом с фактическим эндоскопическим изображением во время интервенционной процедуры.
[0043] Фиг. 7 - блок-схема последовательности операций способа для определения относительных расстояний между просветом тела и структурой высокого риска в соответствии с вариантом осуществления настоящего изобретения. Моделирующая программа совмещает сегментированную структуру 420 высокого риска с сегментированным просветом 410 тела (этап 652). Как известно в данной области техники, каждое сегментированное изображение будет иметь метки совмещения, которые могут быть выровнены для совмещения изображений друг с другом.
[0044] Как только изображения совмещаются, моделирующая программа преобразует структуру 420 высокого риска в каждую точку или воксел на стенке 201 просвета тела (этап 654) и измеряет расстояние от точки или воксела до структуры высокого риска (этап 656).
[0045] Изобретение может принимать вид полностью аппаратного варианта осуществления, полностью программного варианта осуществления или варианта осуществления, содержащего аппаратные и программные элементы. В типовом варианте осуществления изобретение реализуется в программном обеспечении, которое включает в себя, но не ограничивается, микропрограммное обеспечение, резидентное программное обеспечение, микрокод и т.п.
[0046] Кроме того, изобретение может принимать вид компьютерного программного продукта, доступного с используемого компьютером или считываемого компьютером носителя, предоставляющего программный код для использования компьютером или применительно к компьютеру или любой системе либо устройству исполнения инструкций. Для целей этого описания используемый компьютером или считываемый компьютером носитель может быть любым неизменяемым со временем устройством, которое может содержать или хранить программу для использования системой либо устройством исполнения инструкций или применительно к ним.
[0047] Вышеупомянутый способ может быть реализован с помощью программного продукта, содержащего (содержащегося на) машиночитаемый носитель, имеющий исполняемую машиной программу из инструкций, которая при выполнении машиной, например компьютером, выполняет этапы этого способа. Этот программный продукт может храниться на любом из ряда известных машиночитаемых носителей, включая, но не только, компакт-диски, гибкие диски, запоминающие устройства USB и т.п.
[0048] Носитель может быть электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой (или устройством). Примеры считываемого компьютером носителя включают в себя полупроводниковую или твердотельную память, магнитную ленту, сменную дискету, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), жесткий магнитный диск и оптический диск. Современные примеры оптических дисков включают в себя постоянное запоминающее устройство на компакт-диске (CD-ROM), перезаписываемый компакт-диск (CD-R/W) и DVD.
[0049] Предшествующее описание и прилагаемые чертежи предназначены для пояснения, а не ограничения изобретения. Объем изобретения имеет целью включить в себя эквивалентные разновидности и конфигурации в полном объеме нижеследующей формулы изобретения.
Группа изобретений относится к области медицины, а именно к диагностике. Для выделения структур высокого риска в виртуальной визуализации во время интервенционной процедуры в полости тела выполняют КТ сканирование полости тела, сегментируют просвет тела и структуру высокого риска. Определяют относительные расстояния между полостью тела и структурой высокого риска. Создают виртуальную визуализацию внутреннего пространства исследуемой полости тела, маркируют области стенки просвета в разные цвета в зависимости от относительного расстояния. Группа изобретений позволяет определить безопасный доступ к структуре высокого риска при проведении интервенционной процедуры за счет использования моделирующей программы. 3 н. и 11 з.п. ф-лы, 7 ил.
1. Способ для выделения структур высокого риска в виртуальной визуализации для использования во время интервенционной процедуры в просвете тела, содержащий этапы, на которых:
выполняют КТ сканирование просвета тела;
сегментируют просвет тела;
сегментируют структуру высокого риска, находящуюся за пределами упомянутого просвета тела;
определяют относительные расстояния между точками стенки просвета тела собственно просвета тела и структурой высокого риска;
сравнивают эти относительные расстояния с одним или более пороговыми значениями для расстояний, на которых безопасно выполнение разреза стенки просвета тела;
создают виртуальную визуализацию внутреннего пространства просвета тела, соответствующую интервенционному изображению с камеры; и
маркируют области стенки просвета тела виртуальной визуализации просвета тела посредством добавления видимых меток на стенку просвета тела, когда упомянутое сравнение указывает, что относительные расстояния находятся в пределах предопределенных пороговых значений,
при этом первую область стенки просвета тела маркируют посредством первой видимой метки из упомянутых видимых меток, когда первое относительное расстояние из упомянутых относительных расстояний находится в пределах первого предопределенного порогового значения, и
при этом вторую область стенки просвета тела маркируют посредством второй видимой метки из упомянутых видимых меток, когда второе относительное расстояние из упомянутых относительных расстояний находится в пределах второго предопределенного порогового значения.
2. Способ по п. 1, в котором упомянутые области стенки просвета тела, которые маркируют, находятся в пределах предопределенного расстояния от структуры высокого риска.
3. Способ по п. 2, в котором упомянутые области стенки просвета тела маркируют путем окрашивания предопределенным цветом вокселей в пределах упомянутого предопределенного расстояния до структуры высокого риска.
4. Способ по п. 3, в котором упомянутые области стенки просвета тела окрашивают в один из множества цветов, согласно тому, что упомянутые относительные расстояния находятся в пределах одного из множества предопределенных пороговых значений.
5. Способ по п. 1, в котором область стенки просвета тела окрашивают в цвет, соответствующий одной из множества структур высокого риска в пределах предопределенного расстояния до области стенки просвета тела.
6. Способ по п. 1, в котором каждый воксел стенки просвета тела окрашивают полупрозрачным наложением, если расстояние между этим вокселом и структурой высокого риска находится в пределах предопределенного порогового значения.
7. Способ по п. 1, в котором точку из точек на стенке просвета тела маркируют, если расстояние между этой точкой на стенке просвета тела и структурой высокого риска, измеренное под углом, с которым врач планирует выполнять разрез, находится в пределах предопределенного порогового значения.
8. Способ по п. 1, в котором просвет тела является трахеобронхиальным деревом.
9. Способ по п. 1, в котором структура высокого риска является кровеносными сосудами.
10. Система для выделения структур высокого риска в виртуальной визуализации для использования во время интервенционной процедуры в просвете тела, содержащая:
процессор;
память, функционально соединенную с процессором; и
устройство отображения, функционально соединенное с процессором;
при этом в памяти закодированы инструкции моделирования, которые при выполнении процессором вызывают генерирование виртуальной визуализации эндоскопического изображения просвета тела, вызывают определение расстояния между просветом тела и структурой высокого риска за пределами просвета тела, на основе определенного расстояния вызывают маркирование вокселей на стенке просвета тела в виртуальной визуализации, которые находятся в пределах порогового расстояния от структуры высокого риска, и вызывают отображение виртуальной визуализации с упомянутым маркированием, чтобы выделить структуры высокого риска на устройстве отображения, при этом воксели на стенке маркируются посредством добавления видимых меток на стенку просвета тела, когда определенное расстояние находится в пределах предопределенного порогового значения,
при этом первая область стенки просвета тела маркируется посредством первой видимой метки из упомянутых видимых меток, когда первое относительное расстояние между упомянутой первой областью просвета тела и структурой высокого риска находится в пределах первого предопределенного порогового значения, и
при этом вторая область стенки просвета тела маркируется посредством второй видимой метки из упомянутых видимых меток, когда второе относительное расстояние между упомянутой второй областью просвета тела и структурой высокого риска находится в пределах второго предопределенного порогового значения.
11. Система по п. 10, в которой процессор, память и устройство отображения находятся в рабочей станции формирования изображений.
12. Система по п. 10, дополнительно содержащая эндоскоп, функционально подключенный к процессору, при этом виртуальная визуализация совмещается с реальным эндоскопическим изображением, генерируемым эндоскопом и представляемым вблизи упомянутой виртуальной визуализации эндоскопического изображения.
13. Считываемый компьютером носитель информации, на котором закодированы:
инструкции для выполнения КТ сканирования просвета тела;
инструкции для сегментирования просвета тела;
инструкции для сегментирования структуры высокого риска, расположенной за пределами просвета тела;
инструкции для определения относительных расстояний между точками стенки просвета тела собственно просвета тела и структурой высокого риска;
инструкции для сравнения этих относительных расстояний с одним или более пороговыми значениями для расстояний, на которых безопасно выполнять разрез стенки просвета тела;
инструкции для создания виртуальной визуализации внутреннего пространства просвета тела, соответствующей интервенционному изображению с камеры; и
инструкции для маркировки областей стенки просвета тела в виртуальной визуализации посредством добавления видимых меток на стенку просвета тела, когда упомянутое сравнение указывает, что относительные расстояния находятся в пределах предопределенных пороговых значений,
при этом первая область стенки просвета тела маркируется посредством первой видимой метки из упомянутых видимых меток, когда первое относительное расстояние из упомянутых относительных расстояний находится в пределах первого предопределенного порогового значения, и
при этом вторая область стенки просвета тела маркируется посредством второй видимой метки из упомянутых видимых меток, когда второе относительное расстояние из упомянутых относительных расстояний находится в пределах второго предопределенного порогового значения.
14. Считываемый компьютером носитель информации по п. 13, в котором инструкции для маркировки областей стенки просвета тела содержат инструкции для окрашивания предопределенным цветом вокселей на стенке просвета тела в пределах предопределенного расстояния до структуры высокого риска.
| US 2004015070 А1, 22.01.2004 | |||
| US 2009156895 A1, 18.06.2009 | |||
| US 6346940 B1, 12.02.2002 | |||
| DE 102006003179 A1, 02.08.2007 | |||
| WO 2005008591 A2, 27.01.2005 | |||
| WO 2008095068 A1, 07.08.2008 | |||
| RIEDER C | |||
| Visualization of Risk Structures for Interactive Planning of Image Guided Radiofrequency Ablation of Liver Tumors, 2009, SPIE Medical Imaging, 726134-726134-9. |

