Область техники
Изобретение относится к области медицинской визуализации и, в частности, относится к отображению (mapping) по меньшей мере части структуры на изображении по меньшей мере части тела субъекта.
Уровень техники
Медицинская визуализация является полезным инструментом для обеспечения визуальных представлений внутренней части тела субъекта, включая органы. Существует множество методов медицинской визуализации различных типов, в том числе компьютерная томография (КТ), магнитно-резонансная томография (МРТ), ультразвуковое исследование (УЗИ) и т. п. Изображения, полученные в результате медицинской визуализации, могут оказаться полезными для клинического анализа субъекта и, если потребуется, медицинского вмешательства. Например, медицинская визуализация, в частности, полезна для скрининга рака.
Сканограммы компьютерной томографии часто используют в скрининге рака легких, так как эти сканограммы недорогие, и анализ изображений, созданных посредством компьютерной томографии, по общему признанию, внес вклад в снижение уровня смертности субъектов. Сканограммы компьютерной томографии получают рентгенологи, от которых требуется документировать эти сканограммы в соответствии со стандартизованной схемой отчетности Lung-RADSTM. По этой схеме легкие разбивают на пять долей легких, а эти пять долей легких делят на двадцать сегментов легких. Согласно схеме, местоположения любых обнаруженных легочных узелков (например, аномалий или отклонений от нормы) должны быть описаны относительно долей или сегментов легких.
Например, в US 2014/0079306 A1 описан способ, в котором получают трехмерное медицинское изображение грудной клетки, выделяют бронхиальную структуру из этого трехмерного медицинского изображения, делят бронхиальную структуру на множество бронхиальных структур на основе разветвления бронхиальной структуры и получают множество разделенных областей легких на основе множества разделенных бронхиальных структур.
Однако, хотя доли легких (и бронхиальные структуры) отделены друг от друга видимыми щелями и поэтому определяются непосредственно, анатомические границы самих сегментов легких определяют относительно центральных артерий. Из-за этого сегменты легких труднее поддаются быстрому выявлению на изображениях легких и в результате могут быть легко перепутаны, даже опытными рентгенологами. Поэтому в отчетах ошибки с местоположением узелков относительно сегментов легких - это обычное явление.
Кроме того, известно, что существующие методы сегментации чувствительны к шуму и зависят от высокого пространственного разрешения изображения, что невозможно в большинстве методов медицинской визуализации (например, низкое разрешение изображения типично для скрининга методом компьютерной томографии).
Следовательно, существует потребность в улучшенном способе и устройстве для отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта
Раскрытие сущности изобретения
Как отмечено выше, ограничением существующих подходов являются трудности в выявлении местоположений сегментов частей тела субъекта (например, сегментов легких). Учитывая, что эти сегменты часто определяют относительно сосудистой структуры органа, для преодоления данной проблемы было бы полезно иметь способ выявления линий хребта сосудистого разветвления, чтобы врач мог легко определять границы сегментов частей тела субъекта.
Поэтому в соответствии с первой особенностью настоящего изобретения предлагается способ отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта. Способ включает в себя определение первого взвешенного центроида первой области, окружающей первую точку на изображении по меньшей мере части тела субъекта, определение второго взвешенного центроида во второй области, окружающей первый взвешенный центроид, и отображение по меньшей части первой проекции структуры на изображении на основе положения второго взвешенного центроида относительно положения первого взвешенного центроида.
В некоторых вариантах реализации структура может быть сосудистой структурой.
В некоторых вариантах реализации взвешенный центроид может быть взвешенным по интенсивности центроидом, взвешенным по сосудистости центроидом, взвешенным по плотности центроидом или взвешенным в соответствии со степенью интенсивности. В некоторых вариантах реализации центроид может быть взвешенным в соответствии с гауссовским весом евклидова расстояния.
В некоторых вариантах реализации способ дополнительно может включать в себя определение третьего взвешенного центроида третьей области, окружающей второй взвешенный центроид, и отображение по меньшей мере части первой проекции структуры на изображении на основе положения третьего взвешенного центроида относительно положения второго взвешенного центроида.
В некоторых вариантах реализации способ может дополнительно включать в себя определение четвертого взвешенного центроида четвертой области, окружающей вторую точку на изображении, определение пятого взвешенного центроида пятой области, окружающей четвертый взвешенный центроид, отображение по меньшей мере части второй проекции структуры на изображении на основе положения четвертого взвешенного центроида относительно положения пятого взвешенного центроида и сравнение первой проекции и второй проекции для идентификации по меньшей мере одной линии хребта структуры на изображении. В некоторых вариантах реализации сравнение может включать в себя определение локального максимума расхождения между первой проекцией и второй проекцией. В некоторых вариантах реализации вторая точка может быть расположена рядом с первой точкой.
В некоторых вариантах реализации способ может быть повторен, начиная по меньшей мере c одной другой точки на изображении, чтобы отобразить по меньшей мере часть по меньшей мере одной другой проекции структуры части тела на изображении.
В некоторых вариантах реализации сравнение может включать в себя определение того, расходятся ли первая проекция и вторая проекция, и выявление по меньшей мере одной линии хребта структуры на изображении, которая расположена между первой проекцией и второй проекцией в тех случаях, когда определено, что первая проекция и вторая проекция расходятся.
В некоторых вариантах реализации определение того, расходятся ли первая проекция и вторая проекция, может включать в себя определение того, что первая проекция и вторая проекция расходятся, если евклидово расстояние между точкой на первой проекции и соответствующей точкой на второй проекции меньше, чем евклидово расстояние между последующей точкой на первой проекции и последующей соответствующей точкой на второй проекции. В некоторых вариантах реализации определение того, расходятся ли первая проекция и вторая проекция, может включать в себя определение того, что первая проекция и вторая проекция расходятся, если среднее арифметическое евклидово расстояние между соответствующими точками на первой проекции и второй проекции больше порогового значения.
В некоторых вариантах реализации определение того, расходятся ли первая проекция и вторая проекция, может включать в себя определение того, что первая проекция и вторая проекция расходятся, если максимальное евклидово расстояние между соответствующими точками на первой проекции и второй проекции больше порогового значения.
В некоторых вариантах реализации выявление по меньшей мере одной линии хребта структуры на изображении может включать в себя выявление по меньшей мере одной линии хребта, которая находится на полпути между первой проекцией и второй проекцией. В некоторых вариантах реализации способ может дополнительно включать в себя выявление, что по меньшей мере одна линия хребта отсутствует между первой проекцией и второй проекцией в тех случаях, когда определено, что первая проекция и вторая проекция сходятся.
В некоторых вариантах реализации изображение по меньшей мере части тела субъекта может быть получено путем свертывания полученного изображения по меньшей мере части тела субъекта с первым гауссовым ядром для получения первого сглаженного изображения, свертывания полученного изображения со вторым гауссовым ядром для получения второго сглаженного изображения и вычитания первого сглаженного изображения из второго сглаженного изображения для получения изображения. В некоторых вариантах реализации стандартное отклонение первого гауссова ядра может быть больше стандартного отклонения второго гауссова ядра.
В некоторых вариантах реализации изображение может быть двумерным изображением, а точка на изображении является пикселем, или изображение может быть трехмерным изображением, а точка на изображении является вокселем.
В некоторых вариантах реализации изображение может быть двумерным изображением, а по меньшей мере одна линия хребта может быть по меньшей мере одной линией на двумерном изображении, или изображение может быть трехмерным изображением, а по меньшей мере одна линия хребта может быть по меньшей мере одной поверхностью в трехмерном изображении.
В некоторых вариантах реализации способ может дополнительно включать в себя повторную дискретизацию изображения в изотропные пиксели или изотропные воксели перед определением первого взвешенного центроида.
В соответствии со второй особенностью настоящего изобретения предлагается компьютерный программный продукт, содержащий компьютерочитаемый носитель, который имеет содержащийся в нем машиночитаемый код, выполненный таким образом, что его исполнение подходящим компьютером или процессором вызывает осуществление компьютером или процессором способа или способов, описанных выше.
В соответствии с третьей особенностью настоящего изобретения предлагается устройство для отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта. Устройство включает в себя процессор, выполненный с возможностью определения первого взвешенного центроида первой области, окружающей первую точку на изображении по меньшей мере части тела субъекта, определения второго взвешенного центроида во второй области, окружающей первый взвешенный центроид, и отображения по меньшей части первой проекции структуры на изображении на основе положения второго взвешенного центроида относительно положения первого взвешенного центроида.
В некоторых вариантах реализации процессор может быть дополнительно выполнен с возможностью определения четвертого взвешенного центроида четвертой области, окружающей вторую точку на изображении, определения пятого взвешенного центроида пятой области, окружающей четвертый взвешенный центроид, отображения по меньшей мере части второй проекции структуры на изображении на основе положения четвертого взвешенного центроида относительно положения пятого взвешенного центроида и сравнения первой проекции и второй проекции для идентификации по меньшей мере одной линии хребта структуры на изображении. В некоторых вариантах реализации вторая точка может быть расположена рядом с первой точкой.
В некоторых вариантах реализации процессор может быть выполнен с возможностью управления одним или более пользовательскими интерфейсами с целью подготовки для просмотра отображенной по меньшей мере части первой проекции структуры на изображении.
В соответствии с вышеупомянутыми особенностями и вариантами реализации можно автоматически проецировать по меньшей мере часть структуры (например, сосудистой структуры) тела субъекта из конечной точки изображения на определенную длину. Также можно выявлять линии хребта, например при высоком разветвлении сосудов. Кроме того, это достигается простым и эффективным образом. Способ и устройство также обладают высокой устойчивостью к шуму, а также к низкому разрешению изображения. Выявленные линии хребта могут указывать полезную информацию об ориентации (например, для специалиста здравоохранения, такого как рентгенолог) при наложении на исходное изображение, позволяя легко выявлять долевые сегменты.
Таким образом, обеспечиваются улучшенный способ и устройство для отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта.
Краткое описание чертежей
Для лучшего понимания изобретения и для более четкого показа того, как оно может быть введено в действие, далее ссылки будут делаться только посредством примеров на прилагаемые чертежи, на которых:
на ФИГ. 1 приведена структурная схема устройства в соответствии с вариантом реализации;
на ФИГ. 2 приведена блок-схема, иллюстрирующая способ в соответствии с вариантом реализации;
на ФИГ. 3 приведена блок-схема, иллюстрирующая способ в соответствии с другим вариантом реализации;
на ФИГ. 4 приведена блок-схема, иллюстрирующая способ в соответствии с другим вариантом реализации;
на ФИГ. 5 приведена блок-схема, иллюстрирующая способ в соответствии с примером реализации; и
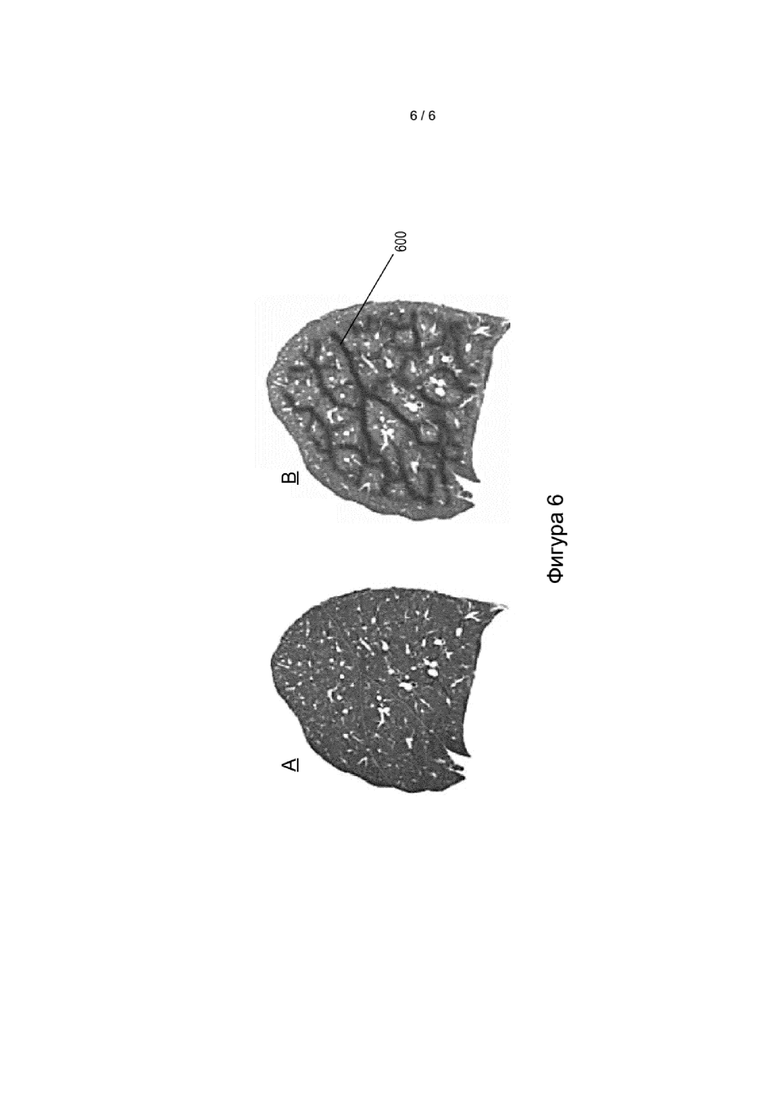
на ФИГ. 6 приведена иллюстрация исходного изображения A и обработанного изображения B в соответствии с вариантом реализации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Как отмечено выше, настоящее изобретение обеспечивает улучшенные способ и устройство для отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта, которые позволяют устранить существующие проблемы.
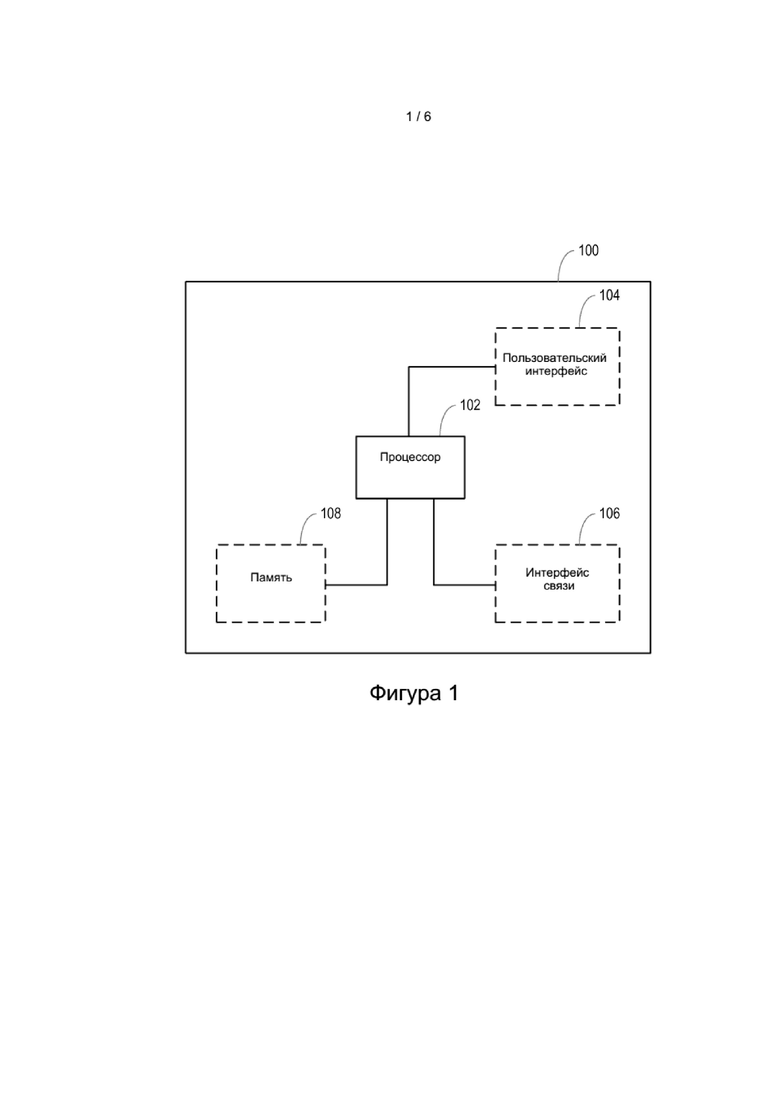
На ФИГ. 1 показана структурная схема устройства 100 в соответствии с вариантом реализации настоящего изобретения, который может быть использован для отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта.
Устройство 100 содержит процессор 102, который управляет работой устройства 100 и который может реализовывать способ, описанный в настоящем документе. Процессор 102 может представлять собой один или более процессоров, блоков обработки, многоядерных процессоров или модулей, которые выполнены с возможностью или запрограммированы для управления устройством 100 описанным в настоящем документе образом. В конкретных реализациях процессор 102 может представлять собой множество программных модулей и/или аппаратных модулей, каждый из которых выполнен с возможностью выполнения или для выполнения отдельных или нескольких этапов способа в соответствии с вариантами реализации изобретения.
Если кратко, процессор 102 выполнен с возможностью определения первого взвешенного центроида первой области, окружающей первую точку на изображении по меньшей мере части тела субъекта, определения второго взвешенного центроида во второй области, окружающей первый взвешенный центроид, и отображения по меньшей части первой проекции структуры на изображении на основе положения второго взвешенного центроида относительно положения первого взвешенного центроида. В некоторых вариантах реализации изображение представляет собой двумерное изображение, а точка на изображении является пикселем. В других вариантах реализации изображение представляет собой трехмерное изображение, а точка на изображении является вокселем. Изображение может быть медицинским изображением, таким как изображение компьютерной томографии (КТ), изображение магнитно-резонансной томографии (МРТ), изображение ультразвукового исследования (УЗИ), рентгеновское изображение или любое другое медицинское изображение.
В некоторых вариантах реализации структура на изображении по меньшей мере части тела субъекта является сосудистой, лимфатической или долевой структурой. В число примеров структуры входят сосуды, такие как артерии, вены и капилляры. Часть тела субъекта может быть любой частью тела субъекта, содержащей структуру, подлежащую отображению. Например, часть тела субъекта может быть легким субъекта, кишкой субъекта, почкой субъекта, печенью субъекта, молочной железой субъекта, другим долевым органом субъекта или любой иной частью тела субъекта, содержащей структуру, подлежащую отображению. Хотя примере приведены для части тела субъекта и структуры по меньшей мере части тела субъекта на изображении, понятно, что изобретение можно использовать также для отображения других структур или других частей тела субъекта.
В любом из вариантов реализации, описанном в настоящем документе, взвешенный центроид может быть взвешен любым подходящим образом. Например, взвешенный центроид может быть центроидом, взвешенным в соответствии с интенсивностью (который может называться взвешенным по интенсивности центроидом), центроидом, взвешенным в соответствии с плотностью (который может называться взвешенным по плотности центроидом), центроидом, взвешенным в соответствии со степенью интенсивности (который может называться взвешенным по степени интенсивности центроидом), или центроидом, взвешенным в соответствии с сосудистостью (который может называться взвешенным по сосудистости центроидом). В любом из этих примеров вес может быть скалярным значением свойства, таким как скалярное значение интенсивности, скалярное значение плотности, скалярное значение степени интенсивности или скалярное значение сосудистости. Чтобы определить взвешенный центроид области, окружающей точку (или окружающей взвешенный центроид) на изображении, значения координат каждой точки в области умножают на вес для этой точки, а полученные значения суммирую и затем делят на сумму всех весов.
Чтобы определить взвешенный по интенсивности центроид области, окружающей точку (или взвешенный центроид) на изображении, значения координат каждой точки в области умножают на скалярное значение интенсивности для этой точки, а полученные значения суммируют и затем делят на сумму всех скалярных значений интенсивности. Взвешенный по интенсивности центроид может быть полезен, так как структура (например, сосуд) на изображении обычно выглядит ярче фона, так что значение интенсивности каждой точки в области может быть использовано непосредственно в качестве весового коэффициента. Взвешенный по интенсивности центроид является примером центроида, взвешенного в соответствии с нулевой производной. Чтобы определить взвешенный по мощности интенсивности центроид области, окружающей точку (или взвешенный центроид) на изображении, значения координат каждой точки в области умножают на скалярное значение степени интенсивности для этой точки, а полученные значения суммируют и затем делят на сумму всех скалярных значений степени интенсивности.
Чтобы определить взвешенный по плотности центроид области, окружающей точку (или взвешенный центроид) на изображении, значения координат каждой точки в области умножают на скалярное значение плотности для этой точки, а полученные значения суммируют и затем делят на сумму всех скалярных значений плотности. Взвешенный по плотности центроид аналогичен взвешенному по интенсивности центроиду, но может применяться к изображениям, где количество фотонов регистрируют как плотность принимаемых фотонов. В некоторых вариантах реализации (например, в варианте реализации с изображением компьютерной томографии или в варианте реализации с рентгеновским изображением) плотность указывают с помощью значения интенсивности для взвешивания центроида. Плотность точки может быть пропорциональна интенсивности точки.
В соответствии с некоторыми вариантами реализации, чтобы определить взвешенный по сосудистости центроид области, окружающей точку (или взвешенный центроид) на изображении, значения координат каждой точки в области умножают на скалярное значение сосудистости для этой точки, а полученные значения суммируют и затем делят на сумму всех скалярных значений сосудистости. Скалярное значение сосудистости определяет, какова вероятность того, что точка на изображении принадлежит сосуду. В некоторых вариантах реализации сосудистость может определяться на основе матрицы Гессе. Например, сосудистость может определяться собственными значениями матрицы Гессе. В некоторых вариантах реализации сосудистость может определяться на основе тензора структуры.
В некоторых вариантах реализации, чтобы определить взвешенный по сосудистости центроид области, окружающей точку (или окружающей взвешенный центроид) на изображении в соответствии с некоторыми вариантами реализации, можно определить первую пространственную производную значений координат каждой точки в области. Эти первые пространственные производные образуют градиентный вектор, который можно использовать в векторном (внешнем) произведении с вектором радиального направления для получения матрицы (а именно, матрицы 2 × 2 для двумерного изображения и матрицы 3 × 3 для трехмерного изображения). Например, суммирование всех трех матриц дает симметричный тензор структуры, из которого можно определить собственные значения. Величина второго собственного значения выражает цилиндрические структуры (например, сосуды) и, следовательно, в некоторых вариантах реализации величина второго собственного значения может быть использована в качестве весового коэффициента для выделения цилиндрической структуры на изображении. В качестве альтернативы или дополнительно в некоторых вариантах реализации в качестве весового коэффициента может быть использовано отношение второго собственного значения к наибольшему собственному значению.
В соответствии с некоторыми вариантами реализации вместо определения первой пространственной производной для значений координат каждой точки в области можно определять вторую пространственную производную для значений координат каждой точки в области. Вторые производные образуют двумерную симметричную матрицу (а именно, матрицу 2 × 2 для двумерного изображения и матрицы 3 × 3 для трехмерного изображения), дающую два и три собственных значения, соответственно. Взвешивание в соответствии с первой производной и второй производной (как описано выше) является примером взвешиваний по сосудистости, которые могут быть использованы для выделения структур (или, в частности, сосудов) на фоновых областях.
В любом из вариантов реализации, описанных выше, может быть также применено дальнейшее взвешивание (например, пространственное взвешивание, такое как гауссовское взвешивание, как описано далее).
Возвращаясь к ФИГ. 1, в некоторых вариантах реализации устройство 100 может также содержать по меньшей мере один пользовательский интерфейс 104. В качестве альтернативы или дополнительно пользовательский интерфейс 104 может быть внешним к устройству 100 (т. е. отдельным или удаленным от него). Например, пользовательский интерфейс 104 может быть частью другого устройства.
Пользовательский интерфейс 104 может быть предназначен для использования в обеспечении субъекта или другого пользователя устройства 100 (например, поставщика услуг здравоохранения, специалиста здравоохранения, оказывающего уход лица или любого другого человека) информацией, получаемой в результате применения способа в соответствии с настоящим изобретением. Процессор 102 может быть выполнен с возможностью управления одним или более пользовательских интерфейсов 104 для обеспечения информации, получаемой в результате применения способа в соответствии с настоящим изобретением. Например, процессор 102 может быть выполнен с возможностью управления одним или более пользовательскими интерфейсами 104 с целью подготовки для просмотра отображенной по меньшей мере части первой проекции структуры на изображении. В качестве альтернативы или дополнительно пользовательский интерфейс 104 может быть выполнен с возможностью приема пользовательского ввода. Другими словами, пользовательский интерфейс 104 может предоставлять субъекту или другому пользователю устройства 100 возможность ввода вручную данных, инструкций или информации. Процессор 102 может быть выполнен с возможностью получения пользовательского ввода из одного или более пользовательских интерфейсов 104.
Пользовательский интерфейс 104 может обеспечивать подготовку для просмотра (или вывод) информации, данных или сигналов для субъекта или другого пользователя устройства 100. В качестве альтернативы или дополнительно пользовательский интерфейс 104 может обеспечивать субъекту или другому пользователю устройства 100 возможность пользовательского ввода, взаимодействия с устройством 100 и/или управления им. Например, пользовательский интерфейс 104 может представлять собой один или более переключателей, одну или более кнопок, клавиатуру, сенсорный экран или приложение (например, на планшете или смартфоне), дисплейный экран или другой визуальный индикатор, один или более динамиков, один или более микрофонов, любые другие компоненты голосового диалога, одну или более ламп, компонент для обеспечения тактильной обратной связи (например, функцию вибрации) или любой иной пользовательский интерфейс или комбинацию пользовательских интерфейсов.
В некоторых вариантах реализации устройство 100 может также содержать интерфейс 106 связи для обеспечения устройства 100 возможностью связи с любыми интерфейсами, датчиками и устройствами, внутренними или внешними для устройства 100. Интерфейс 106 связи обеспечивает возможность связи с любыми интерфейсами, датчиками и устройствами по беспроводному или проводному соединению. Например, в варианте реализации, где пользовательский интерфейс 104 является внешним для устройства 100, интерфейс связи 106 обеспечивает возможность связи с внешним пользовательским интерфейсом по беспроводному или проводному соединению.
В некоторых вариантах реализации устройство 100 может также содержать память 108, выполненную с возможностью хранения программного кода, который может исполняться процессором 102 для осуществления способа, описанного в настоящем документе. Память 108 также может быть использована для хранения информации, данных, сигналов и измеренных значений, созданных или полученных процессором 102 устройства 100 или любыми устройствами, датчиками и интерфейсами, являющихся внешними для устройства 100.
Понятно, что на ФИГ. 1 показаны только компоненты, требуемые для иллюстрации данного аспекта изобретения, а в конкретной реализации устройство 100 может содержать компоненты в дополнение к показанным. Например, устройство 100 может содержать батарею или другой источник питания для обеспечения энергией устройства 100 или средство для подключения устройства 100 к питанию от электросети.
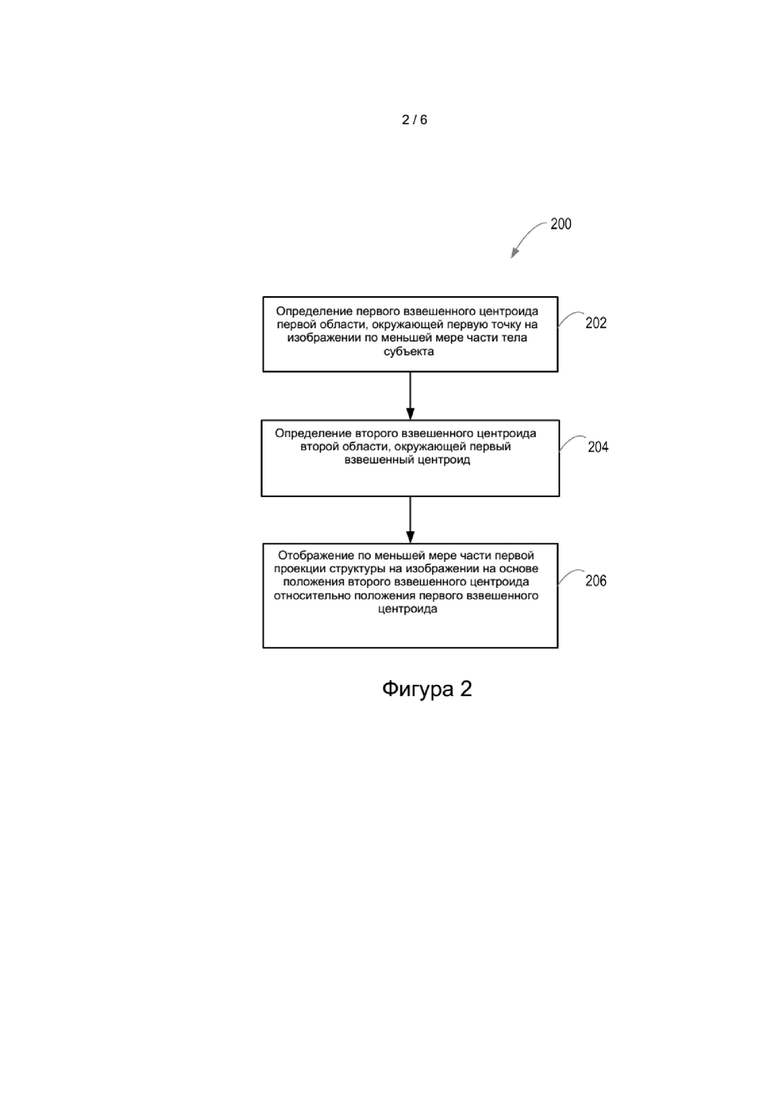
На ФИГ. 2 показан способ 200 отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта в соответствии с вариантом реализации. Показанный способ 200 в общем случае может быть осуществлен под управлением процессора 102 устройства 100.
Как показано на ФИГ. 2, в блоке 202 определяют первый взвешенный центроид первой области, окружающей первую точку на изображении по меньшей мере части тела субъекта. Фактически, первую точку на изображении используют в качестве начальной точки для первой проекции структуры на изображении. Первая точка на изображении может быть произвольно выбранной точкой на изображении или может быть заданной точкой на изображении. Первый взвешенный центроид затем используется в качестве следующей точки для первой проекции структуры на изображении. Первый взвешенный центроид представляет собой взвешенный центроид первой области, окружающей первую точку на изображении. В настоящем документе область, окружающая точку (или взвешенный центроид) может также называться локальной окрестностью вокруг точки (или взвешенного центроида).
Размер области, окружающей точку, может иметь заданную площадь. Например, в некоторых вариантах реализации область, окружающая точку, может быть предварительно запрограммированной областью, хранящейся в памяти 108. В некоторых вариантах реализации область может быть установлена процессором 102 на основе информации, полученной из испытания, выполненного на пробных наборах данных, или основанной на пользовательском вводе, принятом посредством пользовательского интерфейса 104. Область может также быть адаптируемой процессором 102 на основе информации, изученной процессором 102 или введенной пользователем и принятой посредством пользовательского интерфейса 104. В некоторых вариантах реализации область может быть установлена в соответствии с размером изображения, размером элемента, который нужно отобразить, и/или относительными размерами изображения и элемента, который нужно отобразить. В некоторых вариантах реализации для различных элементов могут быть использованы различные размеры. Например, элементы меньшего размера (такие, как капилляры) могут быть отображены с помощью области размер, которой меньше, чем используют для отображения более крупных элементов (таких, как вены или артерии), В некоторых вариантах реализации изображение может быть отображено неоднократно с использованием диапазона областей различного размера, чтобы определить местоположение элементов в различных масштабах. Например, типичные размеры сегментов легких (т. е. подъединиц, которые образуют доли легких) составляют около 50 мм. Поэтому, если нужно отобразить сегмент легкого, область, используемая для вычисления центроидов, может быть установлена равной ширине пикселя или вокселя, которая меньше этого размера, чтобы можно было различать сегменты легкого.
В блоке 204 определяют второй взвешенный центроид второй области, окружающей первый взвешенный центроид. В блоке 206 отображают по меньшей мере часть первой проекции структуры на изображении на основе положения второго взвешенного центроида относительно положения первого взвешенного центроида. Отображение между положением второго взвешенного центроида относительно положения первого взвешенного центроида можно назвать этапом в первой проекции (либо ее секцией или частью). Поэтому отображение по меньшей мере части первой проекции определяют на основе относительных положений первого взвешенного центроида и второго взвешенного центроида. Таким образом, первый взвешенный центроид и второй взвешенный центроид образуют часть первой проекции. То есть первая проекция содержит множество центроидов, включая по меньшей мере первую (начальную) точку, первый взвешенный центроид и второй взвешенный центроид. В некоторых вариантах реализации, например, отображение по меньшей мере части первой проекции может быть определено как линия (которая может быть прямой или изогнутой), соединяющая второй взвешенный центроид с первым взвешенным центроидом.
Фактически, отображение по меньшей мере части первой проекции структуры на изображении выделяет или выводит из изображения местоположение по меньшей мере части структуры на изображении. Следовательно, в соответствии с вышеописанным способом, последовательные взвешенные центроиды намечают траекторию на изображении, которая направлена в направлении или вдоль элементов структуры. Например, последовательные взвешенные центроиды могут намечать последовательные точки вдоль капилляра (например, от самого тонкого конца капилляра в направлении связанной с ним вены или артерии). В некоторых вариантах реализации можно сформировать накладку с представлением по меньшей мере части первой проекции структуры на этой накладке.
Отображенную по меньшей мере часть первой проекции структуры на изображении затем можно подготовить для просмотра субъектом или другим пользователем. Например, как упоминалось выше, процессор 102 может быть выполнен с возможностью управления одним или более пользовательскими интерфейсами 104 с целью подготовки для просмотра отображенной по меньшей мере части первой проекции структуры на изображении. В одном примере реализации отображенная по меньшей мере часть первой проекции структуры подготавливают для просмотра на дисплейном экране. Как упоминалось ранее, в некоторых вариантах реализации можно сформировать накладку с представлением по меньшей мере части первой проекции структуры на этой накладке. Следовательно, в некоторых вариантах реализации отображенная по меньшей мере часть первой проекции структуры может быть подготовлена для просмотра в виде накладки поверх исходного изображения. Таким образом, структуру части тела на изображении можно визуализировать или выделить.
Показанный на ФИГ. 2 способ может быть повторен, начиная по меньшей мере c одной другой точки на изображении, чтобы отобразить по меньшей мере часть по меньшей мере одной другой проекции структуры части тела на изображении. В некоторых вариантах реализации каждую точку на изображении используют в качестве начальной точки для проекции. Другими словами, в соответствии с некоторыми вариантами реализации, проекция начинается из каждой точки на изображении.
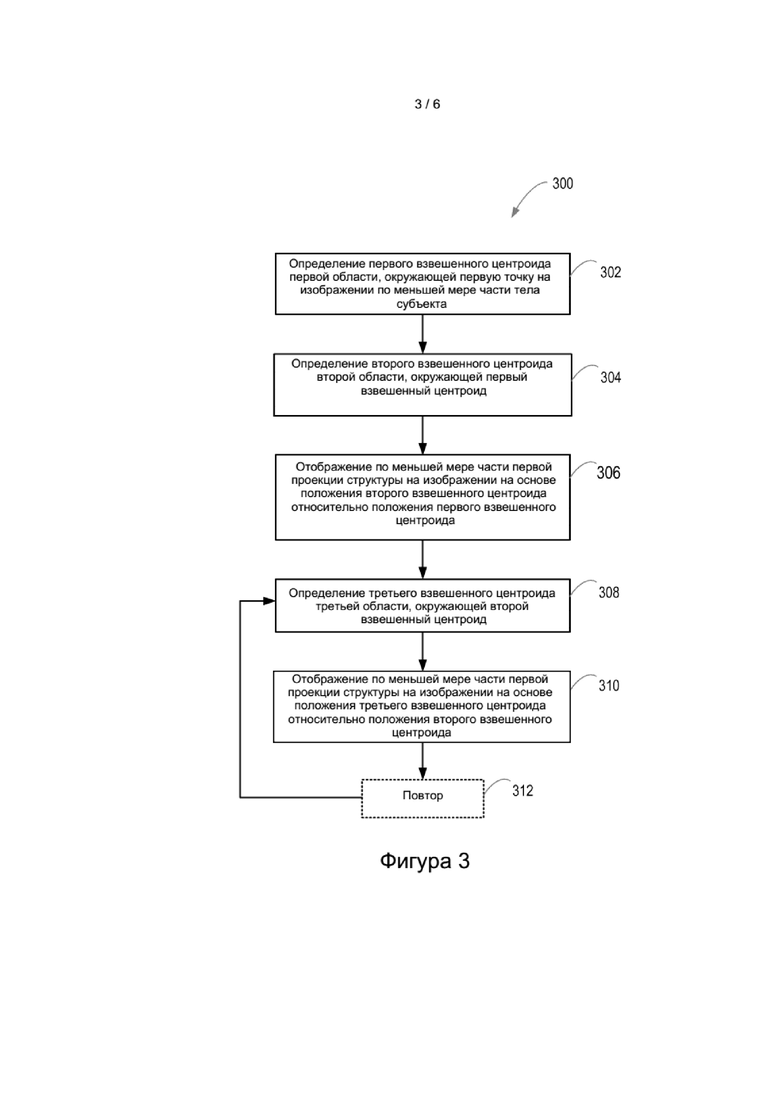
На ФИГ. 3 показан способ 300 отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта в соответствии с другим вариантом реализации. Показанный способ 300 в общем случае может быть осуществлен под управлением процессора 102 устройства 100.
Как показано на ФИГ. 3, в блоке 302 определяют первый взвешенный центроид первой области, окружающей первую точку на изображении по меньшей мере части тела субъекта. В блоке 304 определяют второй взвешенный центроид второй области, окружающей первый взвешенный центроид. В блоке 306 отображают по меньшей мере часть первой проекции структуры на изображении на основе положения второго взвешенного центроида относительно положения первого взвешенного центроида. Как упоминалось выше, отображение между положением второго взвешенного центроида относительно положения первого взвешенного центроида является первым этапом в первой проекции. Другими словами, выполняют способ, описанный выше со ссылкой, соответственно, на блок 202, блок 204 и блок 206, изображенные на ФИГ. 2,. Подробности способа не будут повторяться здесь, но понятно, что они также применимы к блокам 302, 304 и 306, изображенным на ФИГ. 3.
В блоке 308, изображенном на ФИГ. 3, определяют третий взвешенный центроид третьей области, окружающей второй взвешенный центроид. В блоке 310 отображают по меньшей мере часть первой проекции структуры на изображении на основе положения третьего взвешенного центроида относительно положения второго взвешенного центроида. Отображение между положением третьего взвешенного центроида относительно положения второго взвешенного центроида является вторым этапом в первой проекции. Таким образом, первая проекция содержит множество центроидов и, в данном варианте реализации, включает в себя по меньшей мере первую (исходную) точку, первый взвешенный центроид, второй взвешенный центроид и третий взвешенный центроид.
В блоке 312 повторяют способ из блоков 308 и 310 для по меньшей мере одного другого этапа первой проекции (или по меньшей мере одного другого взвешенного центроида). Здесь определяют каждый из по меньшей мере одного других взвешенных центроидов на основе области, окружающей предыдущий взвешенный центроид, и отображают по меньшей мере часть первой проекции структуры на основе положения по меньшей мере одного другого взвешенного центроида относительно предыдущего взвешенного центроида. Отображение между каждым по меньшей мере одним другим взвешенным центроидом относительно предыдущего взвешенного центроида является еще одним этапом в первой проекции. Таким образом, первая проекция может содержать множество этапов N.
Способ из блоков 308 и 310 может быть повторен для заданного количества этапов N (или для заданного количества взвешенных центроидов) или заданное количество раз. В некоторых вариантах реализации значение заданного количества этапов N (или заданного количества взвешенных центроидов) или заданного количества раз может быть запрограммированным значением, хранящимся в памяти 108. В некоторых вариантах реализации это значение может быть установлено процессором 102 на основе информации, полученной из испытания, выполненного на пробных наборах данных, или основанной на пользовательском вводе, принятом посредством пользовательского интерфейса 104. Значение может также быть адаптируемым процессором 102 на основе информации, изученной процессором 102 или введенной пользователем и принятой посредством пользовательского интерфейса 104.
При каждом повторе способа из блоков 308 и 310 определяемые взвешенные центроиды перемещаются в направлении или вдоль структуры на изображении по меньшей мере части тела субъекта. Например, в случае взвешивания центроида по плотности определяемые взвешенные центроиды перемещаются в направлении более плотной (и/или более толстой) структуры на изображении и вдоль структуры к более плотным (и/или более толстым) частям структуры. Аналогичным образом, в случае взвешивания центроида по интенсивности определяемые взвешенные центроиды перемещаются в направлении более интенсивной структуры на изображении и вдоль структуры к более интенсивным частям структуры. Таким образом, можно создавать проекции структур высокой плотности или высокой интенсивности на изображении.
Отображенную первую проекцию структуры на изображении затем можно подготовить для просмотра субъектом или другим пользователем. Например, как упоминалось выше, процессор 102 может быть выполнен с возможностью управления одним или более пользовательскими интерфейсами 104 с целью подготовки для просмотра отображенной первой проекции структуры на изображении. В одном примере реализации отображенной первой проекции структуры подготавливают для просмотра на дисплейном экране. Отображенная первая проекция структуры может быть подготовлена для просмотра в виде накладки поверх исходного изображения. Таким образом, структуру части тела на изображении можно визуализировать или выделить.
Показанный на ФИГ. 3 способ может быть повторен, начиная по меньшей мере c одной другой точки на изображении, чтобы отобразить по меньшей мере часть по меньшей мере одной другой проекции структуры части тела на изображении. В некоторых вариантах реализации каждую точку на изображении используют в качестве начальной точки для проекции. Другими словами, в соответствии с некоторыми вариантами реализации, проекция начинается из каждой точки на изображении.
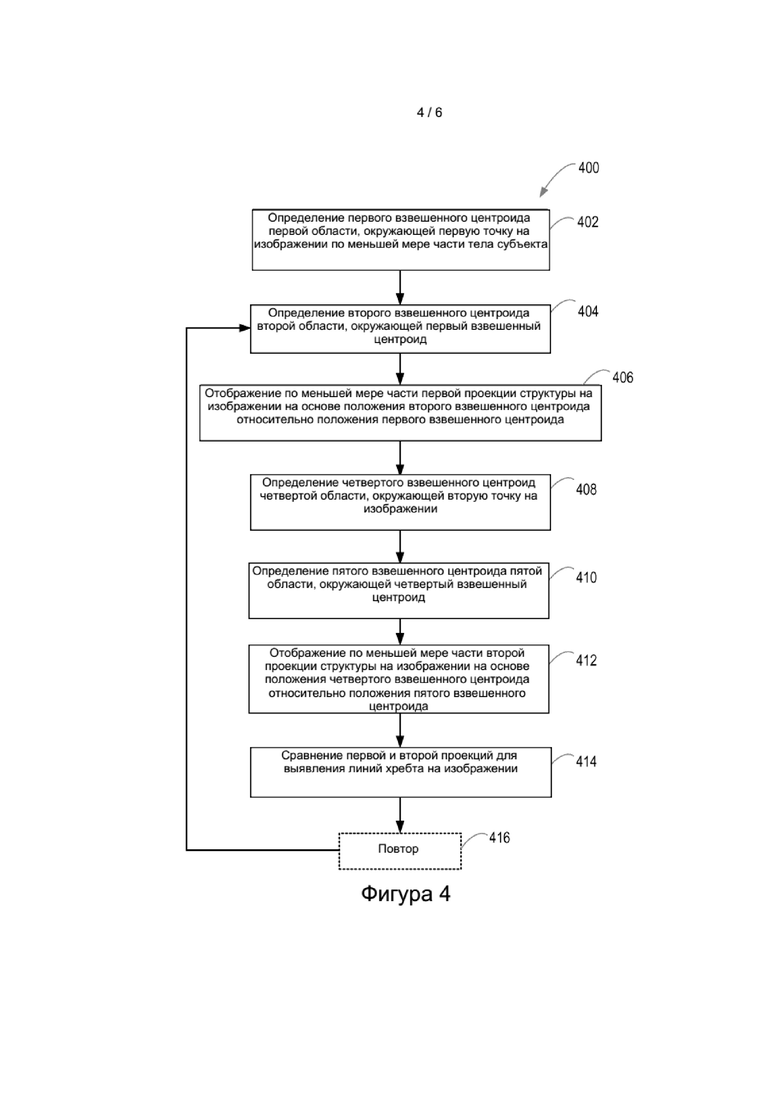
На ФИГ. 4 показан способ 400 отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта в соответствии с другим вариантом реализации. Показанный способ 400 в общем случае может быть осуществлен под управлением процессора 102 устройства 100.
Как показано на ФИГ. 4, в блоке 402 определяют первый взвешенный центроид первой области, окружающей первую точку на изображении по меньшей мере части тела субъекта. В блоке 404 определяют второй взвешенный центроид второй области, окружающей первый взвешенный центроид. В блоке 406 отображают по меньшей мере часть первой проекции структуры на изображении на основе положения второго взвешенного центроида относительно положения первого взвешенного центроида. Как упоминалось выше, отображение между положением второго взвешенного центроида относительно положения первого взвешенного центроида является первым этапом в первой проекции. Другими словами, выполняют способ, описанный выше со ссылкой, соответственно, на блок 202, блок 204 и блок 206, изображенные на ФИГ. 2,. Подробности способа не будут повторяться здесь, но понятно, что они также применимы к блокам 402, 404 и 406, изображенным на ФИГ. 4.
В блоке 408 определяют четвертый взвешенный центроид четвертой области, окружающей вторую точку на изображении. Вторая точка на изображении может быть смежной (или соседней) с первой точкой на изображении. Например, первая точка и вторая точка могут быть смежными (или соседними) пикселями на двумерном изображении или смежными (или соседними) вокселями на трехмерном изображении. Фактически, каждую из двух смежных (или соседних) точек на изображении используют в качестве начальных точек. Вторая точка является исходной точкой для второй проекции структуры по меньшей мере части тела на изображении.
В блоке 410 определяют пятый взвешенный центроид пятой области, окружающей четвертый взвешенный центроид. В блоке 412 отображают по меньшей мере часть второй проекции структуры на изображении на основе положения четвертого взвешенного центроида относительно положения пятого взвешенного центроида. Отображение между положением четвертого взвешенного центроида относительно положения пятого взвешенного центроида является первым этапом во второй проекции. Таким образом, вторая проекция, соответственно, содержит множество центроидов, включая по меньшей мере вторую (начальную) точку, четвертый взвешенный центроид и пятый взвешенный центроид. Фактически, первая проекция и вторая проекция представляют две независимые проекции структуры по меньшей мере части тела на изображении.
В блоке 414 сравнивают первую проекцию и вторую проекцию для выявления по меньшей мере одной линии хребта структуры на изображении. Линия хребта представляет собой границу между областями структуры на изображении. Например, линия хребта может быть границей между областями структуры с встречными или противоположными направлениями потока или границей между областями, где структура расходится (например, ветви). В вариантах реализации, где изображение является трехмерным изображением, линия хребта может быть плоскостью или поверхностью в трехмерном изображении. Например, линия хребта может быть плоскостью или поверхностью, которая определяет границу между различными частями структуры или между частями структуры, которые расходятся. В вариантах реализации, где изображение является двумерным изображением, линия хребта может быть линией на двумерном изображении. Например, линия хребта может быть линией, которая определяет границу между различными частями структуры или между частями структуры, которые расходятся.
В варианте реализации сравнение первой проекции и второй проекции может включать в себя любое одно или более из определения локального максимума расхождения между первой проекцией и второй проекцией, определения среднего арифметического евклидова расстояния между первой проекцией и второй проекцией и определения евклидова расстояния между соответствующими точками на первой проекции и второй проекции.
В случае определения среднего арифметического евклидова расстояния определяют среднее расстояние для соответствующих точек на двух проекциях Например, для каждой точки на первой проекции определяют евклидово расстояние между этой точкой на первой проекции и соответствующей точкой на второй проекции, а затем получают среднее значение расстояния путем усреднения этих определенных евклидовых расстояний. Другими словами, определяют евклидово расстояние между i-й точкой на первой проекции и i-й точкой на второй проекции, определяют евклидово расстояние между (i + 1)-й точкой на первой проекции и (i + 1)-й точкой на второй проекции и т. д. для каждой точки на первой проекции и среднее арифметическое этих определенных евклидовых расстояний (которое можно также назвать средним арифметическим евклидовым расстоянием) используют в качестве определенного расстояния.
В качестве альтернативы или дополнительно в случае определения локального максимума расхождения определяют максимальное расстояние для соответствующих точек на двух проекциях. Например, для каждой точки на первой проекции определяют евклидово расстояние между этой точкой на первой проекции и соответствующей точкой на второй проекции. Максимум этих определенных евклидовых расстояний является максимальным расстоянием. Другими словами, определяют евклидово расстояние между i-й точкой на первой проекции и i-й точкой на второй проекции, определяют евклидово расстояние между (i + 1)-й точкой на первой проекции и (i + 1)-й точкой на второй проекции и т. д. для каждой точки на первой проекции и максимальное или наибольшее из этих определенных евклидовых расстояний (которое можно также назвать локальным максимумом расхождения) используют в качестве определенного расстояния.
Если определенное расстояние (например, среднее арифметическое евклидово расстояние между соответствующими точками на первой проекции и второй проекции или максимальное евклидово расстояние между соответствующими точками первой проекции и второй проекции) ниже или меньше заданного порогового значения, определенное расстояние указывает, что первая проекция и вторая проекция сходятся. С другой стороны, если определенное расстояние (например, среднее арифметическое евклидово расстояние между соответствующими точками на первой проекции и второй проекции или максимальное евклидово расстояние между соответствующими точками первой проекции и второй проекции) выше или больше заданного порогового значения, определенное расстояние указывает, что первая проекция и вторая проекция расходятся.
В некоторых вариантах реализации заданное пороговое значение может быть запрограммированным пороговым значением, хранящимся в памяти 108. В некоторых вариантах реализации пороговое значение может быть установлено процессором 102 на основе информации, полученной из испытания, выполненного на пробных наборах данных, или основанной на пользовательском вводе, принятом посредством пользовательского интерфейса 104. Пороговое значение может также быть адаптируемым процессором 102 на основе информации, изученной процессором 102 или введенной пользователем и принятой посредством пользовательского интерфейса 104. Заданное пороговое значение может быть установлено на 40 мм, 45 мм, 50 мм, 55 мм, 60 мм или промежуточное значение. Хотя для заданного порогового значения приведены примеры значений, понятно, что можно использовать любое другое значение.
В качестве альтернативы или дополнительно при определении евклидова расстояния между соответствующими точками на первой проекции и второй проекции евклидово расстояние между точкой на первой проекции и второй проекции сравнивают с евклидовым расстоянием между последующей точкой на первой проекции и второй проекции. Например, для каждой точки на первой проекции определяют евклидово расстояние между этой точкой на первой проекции и соответствующей точкой на второй проекции. Другими словами, определяют евклидово расстояние между i-й точкой на первой проекции и i-й точкой на второй проекции, определяют евклидово расстояние между (i + 1)-й точкой на первой проекции и (i + 1)-й точкой на второй проекции и т. д. для каждой точки на первой проекции. Затем, определяют, увеличивается ли или уменьшается определенное евклидово расстояние для двух или более последовательных или идущих подряд точек. Например, определяют, является ли евклидово расстояние между (i + 1)-ми точками первой проекции и второй проекции больше или меньше евклидова расстояния между i-ми точками первой проекции и второй проекции. Если евклидово расстояние, определенное для двух или более последовательных или идущих подряд точек на проекциях увеличивается (например, если евклидово расстояние между (i + 1)-ми точками первой проекции и второй проекции больше евклидова расстояния между i-ми точками первой проекции и второй проекции), то первую проекцию и вторую проекцию определяют как расходящиеся. Другими словами, определяют, что первая проекция и вторая проекция расходятся, если евклидово расстояние между точкой на первой проекции и соответствующей точкой на второй проекции меньше, чем евклидово расстояние между последующей точкой на первой проекции и последующей соответствующей точкой на второй проекции. С другой стороны, если евклидово расстояние, определенное для двух или более последовательных или идущих подряд точек на проекция уменьшается (например, если евклидово расстояние между (i + 1)-ми точками первой проекции и второй проекции меньше евклидова расстояния между i-ми точками первой проекции и второй проекции), то первую проекцию и вторую проекцию определяют как сходящиеся. Другими словами, определяют, что первая проекция и вторая проекция сходятся, если евклидово расстояние между точкой на первой проекции и соответствующей точкой на второй проекции больше, чем евклидово расстояние между последующей точкой на первой проекции и последующей соответствующей точкой на второй проекции.
Таким образом, любым из вышеописанных способов можно определить, расходятся (сходятся) ли первая проекция и вторая проекция. Если определено, что первая проекция и вторая проекция расходятся, значит выявлено, что линия хребта структуры лежит (или находится) между первой проекцией и второй проекцией. Например, может быть выявлено, что линия хребта структуры лежит (или находится) на полпути между первой проекцией и второй проекцией, например, вдоль линии, которая равноудалена от первой проекции и второй проекции. С другой стороны, если определено, что первая проекция и вторая проекция сходятся, значит не выявлено, что линия хребта структуры лежит (или находится) между первой проекцией и второй проекцией, или выявлено, что она отсутствует между первой проекцией и второй проекцией.
Таким образом, можно установить по меньшей мере одну линию хребта структуры на изображении путем сравнения первой проекции и второй проекции. Это полезно, например, в случае сосудистой структуры на изображении, так как две проекции будут либо сходиться, либо расходиться из-за разветвляющегося характера сосудистой структуры. Фактически, первая проекция и вторая проекция будут притягиваться к все более укрупняющимся сосудам, чтобы таким образом следовать внутренней структуре сегментов или долей структуры на изображении
Выявленную по меньшей мере одну линию хребта структуры на изображении затем можно подготовить для просмотра субъектом или другим пользователем. Например, процессор 102 может быть выполнен с возможностью управления одним или более пользовательскими интерфейсами 104 с целью подготовки для просмотра выявленной по меньшей мере одной линии хребта структуры. В одном примере реализации выявленную по меньшей мере одну линию хребта структуры подготавливают для просмотра на дисплейном экране. Выявленная по меньшей мере одна линия хребта структуры может быть подготовлена для просмотра в виде накладки поверх исходного изображения. Таким образом, структуру части тела на изображении можно визуализировать или выделить.
Возвращаясь к ФИГ. 4, в блоке 416 можно повторить способ из блоков 404, 406, 408, 410, 412 и 414 для по меньшей мере одних других первой и второй проекций структуры на изображении. Здесь для первой и второй проекций определяют каждый взвешенный центроид на основе области, окружающей предыдущий взвешенный центроид, и положение взвешенного центроида относительно предыдущего взвешенного центроида используют для определения этапа в проекции структуры на изображении. Способ из блоков 404, 406, 408, 410, 412 и 414 может быть повторен для заданного количества этапов N (или для заданного количества взвешенных центроидов) или заданное количество раз. В некоторых вариантах реализации каждую точку на изображении используют в качестве начальной точки для проекции. Другими словами, в соответствии с некоторыми вариантами реализации, проекция начинается из каждой точки на изображении. В некоторых вариантах реализации точность местоположения линии хребта можно улучшить за счет формирования одной или более пар проекций (таким же образом, как описано выше) с другими начальными точками, чем у первой пары проекций, и интерполяции местоположения линии хребта путем сравнения местоположений других расходящихся проекций.
Как упоминалось ранее, в любом из описанных вариантов реализации изображение по меньшей мере части тела субъекта, которое используют в описанном в настоящем документе способе, может быть получено любым пригодным способом. Изображение может быть исходным (например, непосредственным или необработанным) изображением по меньшей мере части тела субъекта или может быть результатом первой обработки полученного изображения по меньшей мере части тела человека.
В одном примере реализации, в котором изображение получают путем обработки первоначально полученного изображения по меньше мере части тела субъекта, причем первоначально полученное изображение свертывают с первым гауссовым ядром для получения первого сглаженного изображения. Первоначальное полученное изображение также свертывают со вторым гауссовым ядром для получения второго сглаженного изображения. Затем путем вычитания первого сглаженного изображения из второго сглаженного изображения получают изображение по меньшей мере части тела субъекта, которое используют в способе, описанном в настоящее документе. В некоторых вариантах реализации стандартное отклонение первого гауссова ядра больше стандартного отклонения второго гауссова ядра. В некоторых вариантах реализации масштаб гауссова ядра выбирают так, чтобы оно было меньше отображаемой структуры. Например, если отображаются сегменты (или доли) легкого, ядро выбирают так, чтобы оно было меньше по масштабу, чем типичный размер сегмента легкого.
В некоторых вариантах реализации перед обработкой изображения по меньшей мере части тела субъекта в соответствии с некоторыми вариантами реализации, описанными в настоящем документе, способ может включать предварительную сегментацию изображения на множество сегментов изображения. В этих вариантах реализации способ может затем выполняться для по меньшей мере одного из множества сегментов изображения. Множество сегментов изображения может представлять различные части тела субъекта. Например, если изображение является изображением легких субъекта, один сегмент изображения может быть левым легким, а другой сегмент изображения может быть правым легким.
В любом из вариантов реализации, описанном в настоящем документе, взвешенный центроид (который может быть первым взвешенным центроидом, вторым взвешенным центроидом, третьим взвешенным центроидом, четвертым взвешенным центроидом, пятым взвешенным центроидом или любым другим взвешенным центроидом) может быть взвешенным любым подходящим образом. Например, взвешенный центроид может быть взвешенным по интенсивности центроидом, взвешенным по плотности центроидом, взвешенным по сосудистости центроидом или взвешенным в соответствии со степенью интенсивности, как описано выше.
В дополнение к этим весам центроид может быть дополнительно взвешенным (т. е. взвешивание по интенсивности, взвешивание по плотности, взвешивание по сосудистости или взвешивание в соответствии со степенью интенсивности может быть дополнительно взвешено) в соответствии с единым весом (например, прямоугольный фильтр) в пределах локального соседства или пространственным весом (например, гауссовский вес евклидова расстояния). В варианте реализации можно выбирать множество точек x (или каждую точка x) в области, окружающей начальную точку или предыдущий взвешенный центроид c. Для каждой выбранной точки x определяют евклидово расстояние d(x) = |x – c|. Затем определяют вес w(x) каждой точки x с помощью гауссовского нормального распределения. Например, формулу гауссовского нормального распределения для определения веса w(x) каждой точки x можно выразить следующим образом:
w(x) = exp(–0,5 × (d × d)/(s × s)),
где s - заданное значение. Заданное значение s может быть запрограммированным значением, хранящимся в памяти 108. В некоторых вариантах реализации заданное значение s может быть установлено процессором 102 на основе информации, полученной из испытания, выполненного на пробных наборах данных, или основанной на пользовательском вводе, принятом посредством пользовательского интерфейса 104. Заданное значение s может также быть адаптируемым процессором 102 на основе информации, изученной процессором 102 или введенной пользователем и принятой посредством пользовательского интерфейса 104.
В некоторых вариантах реализации взвешенный центроид может быть взвешенным в соответствии с гауссовским весом евклидова расстояния, умноженным на отклик локального фильтра сосудов в степени целого числа. Например, отклик фильтра сосудов может быть определен для каждой точки на изображении. Фильтр сосудов обеспечивает значение сосудистости. Как описано ранее, значение сосудистости является скалярным значением, которое описывает, какова вероятность того, что точка (или взвешенный центроид) на изображении принадлежит сосуду. Степень может быть любым целым числом, таким как 1, 2, 3, 4, 5, 6 или любое другое целое число. Использование фильтра сосудов таким образом может обеспечить усиление сосудов. Другими словами, более высокие значения интенсивности можно выделить на изображении, а более низкие значения интенсивности можно преуменьшить на изображении.
В любом из вариантов реализации, описанных в настоящем документе, перед определением первого взвешенного центроида (в блоке 202 на ФИГ. 2, в блоке 302 на ФИГ. 3 или в блоке 402 на ФИГ. 4) способ может дополнительно включать повторную дискретизацию изображения в изотропные точки. Например, изотропные точки в вариантах реализации с двумерным изображением представляют собой изотропные пиксели, а изотропные точки в вариантах реализации с трехмерным изображением представляют собой изотропные воксели. Таким образом, изображение, на котором расстояние между точками неодинаковое, может быть повторно дискретизировано для достижения изотропного расстояния, при котором точки равноудалены от соседних точек во всех направлениях Например, объемы изображения, в которых расстояние между вокселями в направлениях x, y и z не одинаковое, могут быть повторно дискретизированы для получения изотропного расстояния между вокселями, при котором воксели равноудалены от соседних вокселей в трех направлениях - x, y и z. В этих вариантах реализации первая изотропная точка на повторно дискретизированном изображении может быть использована для определения первого взвешенного центроида в любом из вариантов реализации, изображенных на ФИГ. 2, 3 или 4. Аналогичным образом, вторая изотропная точка на повторно дискретизированном изображении может быть использована для определения первого взвешенного центроида в варианте реализации, изображенном на ФИГ. 4. Таким образом, анизотропные точки на изображении могут быть изотропно дискретизированы таким образом, чтобы способ, описанный в настоящем документе, мог быть выполнен без учета расстояния между точками на изображении и без введения геометрических искажений.
В соответствии с любым из вариантов реализации первая точка и вторая точка (и любые другие начальные точки) на изображении, определенные взвешенные центроиды, первая проекция и вторая проекция (и любые другие проекции) могут быть сохранены, например, в памяти 108 под управлением процессора 102. Таким образом, сохраненную информацию можно легко извлечь.
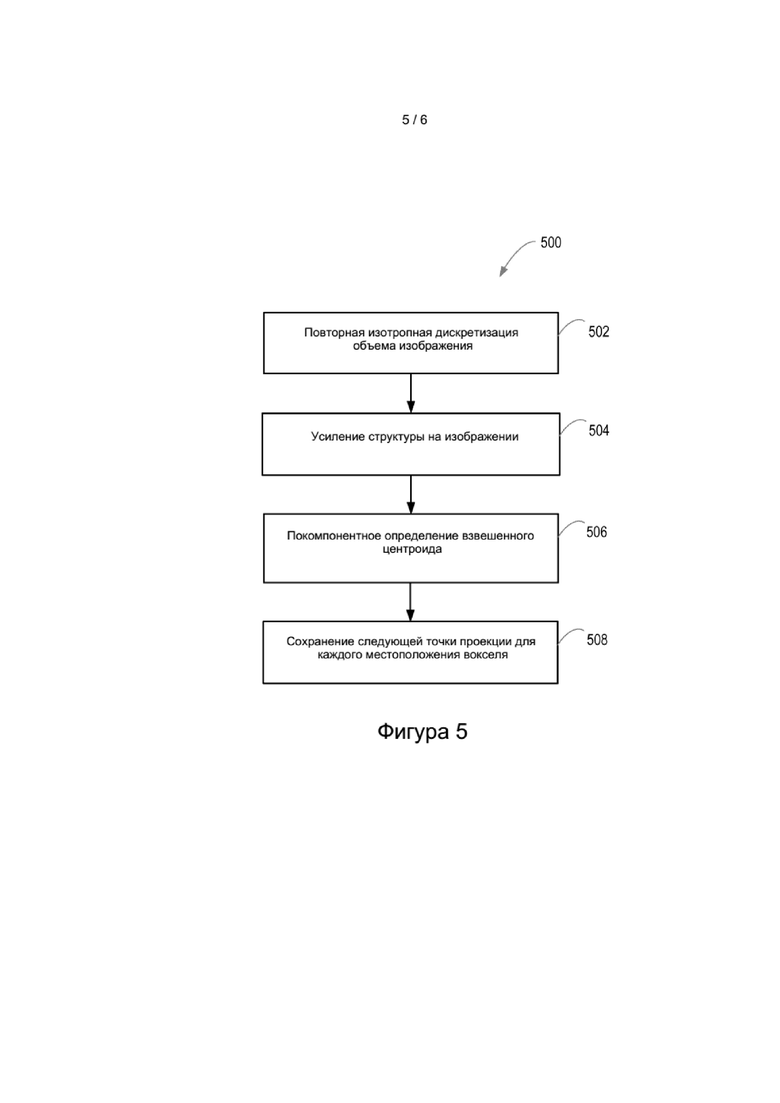
На ФИГ. 5 показан способ 500 отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта в соответствии с примером реализации. В этом примере реализации изображение представляет собой трехмерное изображение, а точки на изображении являются вокселями. Показанный способ 500 в общем случае может быть осуществлен под управлением процессора 102 устройства 100.
Как показано на ФИГ. 5, в блоке 502 объем изображения повторно дискретизируют изотропно. Изотропная повторная дискретизация объема изображения (который может представлять собой анизотропную сетку вокселей) позволяет выполнять последующие этапы без учета расстояния между вокселями и без введения геометрических искажений.
В блоке 504 усиливают структуру (например, по меньшей мере один сосуд) на изображении. Это достигается способом, описанным ранее, за счет свертывания изображения с первым гауссовым ядром для получения первого сглаженного изображения, свертыванием изображения со вторым гауссовым ядром для получения второго сглаженного изображения и вычитанием первого сглаженного изображения из второго сглаженного изображения. В данном примере реализации стандартное отклонение σ1 первого гауссова ядра больше стандартного отклонения σ2 второго гауссова ядра.
В блоке 506 покомпонентно определяют взвешенный центроид. Например, гауссовское сглаживание трехмерного объема Mx, для компонента x пространственного положения выполняют следующим образом:
Mx = x ∙ Ik(x),
где Ik(x) - интенсивность фильтра сосудов (или, в альтернативном варианте реализации, интенсивность изображения) в месте положения
x = (x, y, z), а
k - положительное целое число (например, целое число 8 или любое другое положительное целое число) для сдвига среднего значения в сторону более высоких интенсивностей сосудов.
Здесь компонент x пространственного положения суммируют со взвешиванием по локальной интенсивности в каждой точке на изображении.
Аналогичным образом, выполняют гауссовское сглаживание трехмерного объема My для компоненты y пространственного положения, гауссовское сглаживание объема Mz для компоненты z пространственного положения и гауссовское сглаживание трехмерного объема M0 следующим образом:
My = y ∙ Ik(x), Mz = z ∙ Ik(x) и M0 = Ik(x).
Другими словами каждую компоненту x, y, z пространственного положения суммируются независимо друг от друга, взвешивая по локальной интенсивности в каждой точке на изображении. Здесь трехмерный объем M0 представляет собой сумму весов локальной интенсивности каждой точки на изображении.
Фактически, гауссовское сглаживание компоненты x, y, z трехмерного пространственного положения дает четыре объема такого же размера, что и исходное изображение. Таким образом, следующая точка x' проекции задается xyz-компонентами следующим образом:
x' = [Gσ × Mx(x), Gσ × My(x), Gσ × Mz(x)]/( Gσ ×M0(x)).
Здесь три компоненты x, y, z пространственного положения определяют из взвешенной суммы каждой компоненты, деленной на сумму весов (т. е. взвешенное среднее арифметическое для каждой компоненты).
В блоке 508 для каждого местоположения x вокселя сохраняют следующую точку проекции x' в памяти 108 для последующего извлечения.
Таким образом, в показанном способе 500 в соответствии с данным примером реализации используют серию гауссовских свертываний. Эта серия гауссовских свертываний позволяет эффективно осуществлять способ отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта для всего объема по меньшей мере части (например, легкого) тела субъекта.
На ФИГ. 6 показаны исходное изображение A и обработанное изображение B в соответствии с вариантом реализации. Обработанное изображение B представлено с накладкой, визуализированной поверх исходного изображения A, которое представляет структуру части тела на изображении. Как показано, наивысшие значения 600 расхождения сосудов 600 выглядят темнее на накладке обработанного изображения B. На иллюстрации можно увидеть, что линии хребта, визуализированные на накладке обработанного изображения B, образуются не только на видимых долевых щелях, но и в местах расхождения.
Таким образом, обеспечиваются улучшенный способ и устройство для отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта. Эти способ и устройство могут быть полезны в медицинском визуализационном анализе и инструментах визуализации. Например, эти способ и устройство, в частности, полезны при скрининге рака.
Понятно, что изобретение также применимо к компьютерным программам, в частности компьютерным программам на или в носителе, приспособленном для воплощения изобретения на практике. Программа может быть в виде исходного кода, объектного кода, источника промежуточного кода и объектного кода, например, в частично компилированном виде или любом ином виде, пригодном для использования в реализации способа согласно настоящему изобретению. Понятно также, что такая программа может иметь множество различных структур на архитектурном уровне Например, программный код, реализующий функциональные возможности способа или системы в соответствии с настоящим изобретением, может быть подразделен на одну или более подпрограмм. Специалистам в данной области техники понятны множество различных способов распределения функциональных возможностей между этими подпрограммами. Подпрограммы могут быть сохранены вместе в одном исполняемом файле с образованием независимой программы. Такой исполняемый файл может содержать инструкции, которые могут быть исполнены компьютером, например, инструкции процессору и/или инструкции интерпретатору (например, инструкции интерпретатору Java). В альтернативном варианте одна или более либо все подпрограммы могут быть сохранены по меньшей мере в одном файле внешней библиотеки и связываться с основной программой статически или динамически, например во время запуска. Основная программа содержит по меньшей мере одно обращение по меньшей мере к одной из подпрограмм. Подпрограммы могут также содержать обращения к функциям друг друга. Вариант реализации, относящийся к компьютерному программному продукту, содержит выполненные с возможность исполнения на компьютере инструкции, соответствующие каждой стадии обработки по меньшей мере одного из способов, изложенных в настоящем описании. Эти инструкции могут подразделяться на подпрограммы и/или храниться в одном или более файлов, которые могут быть связаны статически или динамически. Еще один вариант реализации, относящийся к компьютерному программному продукту, содержит выполненные с возможность исполнения на компьютере инструкции, соответствующие каждому средству по меньшей мере одной из систем и/или продуктов, изложенных в настоящем описании. Эти инструкции могут подразделяться на подпрограммы и/или храниться в одном или более файлов, которые могут быть связаны статически или динамически.
Носитель компьютерной программы может быть любым объектом или устройством, выполненным с возможностью содержания программы. Например, носитель может включать в себя хранилище данных, такое как постоянное запоминающее устройство (ПЗУ), например, ПЗУ на компакт-диске (CD ROM) или полупроводниковое ПЗУ, носитель магнитной записи, например, накопитель на жестком диске. Кроме того, носитель может быть носителем, выполненным с возможностью передачи, таким как электрический или оптический сигнал, который может быть передан по электрическому или оптическому кабелю, или по радио, или другими средствами. Когда программа реализована в виде такого сигнала, носитель может быть выполнен в виде такого кабеля, или другого устройства или средств. В альтернативном варианте носитель может быть интегральной схемой, в которой реализована программа, причем эта интегральная схема адаптируется для выполнения или использования при выполнении соответствующего способа.
При использовании на практике данного заявленного изобретения, изучении чертежей, описания и приложенной формулы изобретения специалистами в данной области могут быть придуманы и осуществлены изменения к описанным вариантам реализации В формуле изобретения слово «содержащий/включающий в себя» не исключает другие элементы или этапы, а грамматические средства выражения единственного числа не исключают множественного числа. Один процессор или иной модуль может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт того, что определенные меры изложены во взаимно отличающихся различных пунктах формулы, не означает того, комбинация этих мер не может быть использована эффективно. Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель информации или твердотельный носитель, поставляемый вместе с другим оборудованием или как его часть, но может также распространяться в других видах, например, через Интернет или другие проводные или беспроводные системы дальней связи. Никакие ссылочные позиции в формуле изобретения не следует рассматривать как ограничивающие объем изобретения.
Изобретение относится к области медицинской визуализации, в частности к отображению (mapping) по меньшей мере части структуры на изображении по меньшей мере части тела субъекта. Предложены способ и устройство для отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта. Согласно заявленному решению определяют (202) первый взвешенный центроид первой области, окружающей первую точку на изображении по меньшей мере части тела субъекта. Определяют (204) второй взвешенный центроид второй области, окружающей первый взвешенный центроид. Отображают (206) по меньшей мере часть первой проекции структуры на изображении на основе положения второго взвешенного центроида относительно положения первого взвешенного центроида. Технический результат - повышение информативности получаемых данных. 3 н. и 12 з.п. ф-лы, 6 ил.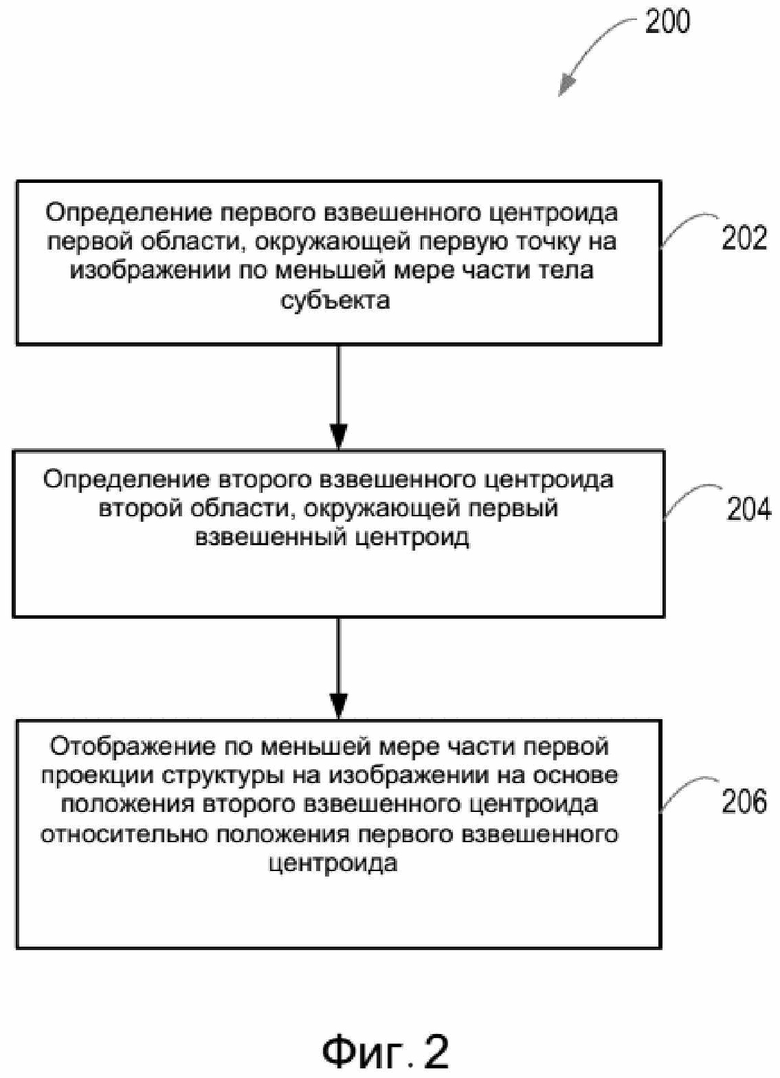
1. Способ отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта, включающий:
определение (402) первого взвешенного центроида первой области, окружающей первую точку на изображении по меньшей мере части тела субъекта;
определение (404) второго взвешенного центроида второй области, окружающей первый взвешенный центроид; и
отображение (406) по меньшей мере части первой проекции структуры на изображении на основе положения второго взвешенного центроида относительно положения первого взвешенного центроида;
определение (408) четвертого взвешенного центроида четвертой области, окружающей вторую точку на изображении, при этом вторая точка расположена рядом с первой точкой;
определение (410) пятого взвешенного центроида пятой области, окружающей четвертый взвешенный центроид;
отображение (412) по меньшей мере части второй проекции структуры на изображении на основе положения четвертого взвешенного центроида относительно положения пятого взвешенного центроида и
сравнение (414) первой проекции и второй проекции для выявления по меньшей мере одной линии хребта структуры на изображении.
2. Способ по п. 1, в котором структура представляет собой сосудистую структуру.
3. Способ по п. 1 или 2, в котором взвешенный центроид представляет собой взвешенный по интенсивности центроид, взвешенный по сосудистости центроид, взвешенный по плотности центроид или взвешенный в соответствии с мощностью интенсивности центроид.
4. Способ по п. 3, в котором центроид дополнительно взвешен в соответствии с гауссовским весом евклидова расстояния.
5. Способ по любому из предшествующих пунктов, который дополнительно включает:
определение третьего взвешенного центроида третьей области, окружающей второй взвешенный центроид, и
отображение по меньшей мере части первой проекции структуры на изображении на основе положения третьего взвешенного центроида относительно положения второго взвешенного центроида.
6. Способ по п. 1, в котором сравнение включает:
определение того, расходятся ли первая проекция и вторая проекция; и
выявление по меньшей мере одной линии хребта структуры на изображении, которая расположена между первой проекцией и второй проекцией в тех случаях, когда определено, что первая проекция и вторая проекция расходятся.
7. Способ по п. 6, в котором определение того, расходятся ли первая проекция и вторая проекция, включает:
определение того, что первая проекция и вторая проекция расходятся, если евклидово расстояние между точкой на первой проекции и соответствующей точкой на второй проекции меньше, чем евклидово расстояние между последующей точкой на первой проекции и последующей соответствующей точкой на второй проекции;
определение того, что первая проекция и вторая проекция расходятся, если среднее арифметическое евклидово расстояние между соответствующими точками на первой проекции и второй проекции больше порогового значения; или
определение того, что первая проекция и вторая проекция расходятся, если максимальное евклидово расстояние между соответствующими точками на первой проекции и второй проекции больше порогового значения.
8. Способ по любому из пп. 6 или 7, в котором выявление по меньшей мере одной линии хребта структуры на изображении включает выявление по меньшей мере одной линии хребта, которая находится на полпути между первой проекцией и второй проекцией.
9. Способ по любому из пп. 6, 7 или 8, дополнительно включающий:
выявление, что по меньшей мере одна линия хребта отсутствует между первой проекцией и второй проекцией в тех случаях, когда определено, что первая проекция и вторая проекция сходятся.
10. Способ по любому из предшествующих пунктов, в котором способ повторяют, начиная по меньшей мере c одной другой точки на изображении, чтобы отобразить по меньшей мере часть по меньшей мере одной другой проекции структуры части тела на изображении.
11. Способ по любому из предшествующих пунктов, в котором изображение представляет собой двумерное изображение, а точка на изображении является пикселем или изображение представляет собой трехмерное изображение, а точка на изображении является вокселем.
12. Способ по любому из предшествующих пунктов, в котором изображение представляет собой двумерное изображение, а по меньшей мере одна линия хребта является по меньшей мере одной линией на двумерном изображении или изображение представляет собой трехмерное изображение, а по меньшей мере одна линия хребта является по меньшей мере одной поверхностью в трехмерном изображении.
13. Компьютерочитаемый носитель, содержащий машиночитаемый код, выполненный таким образом, что его исполнение подходящим компьютером или процессором вызывает осуществление компьютером или процессором способа по любому из пп. 1-12.
14. Устройство (100) для отображения по меньшей мере части структуры на изображении по меньшей мере части тела субъекта, содержащее:
процессор (102), выполненный с возможностью
определения первого взвешенного центроида первой области, окружающей первую точку на изображении по меньшей мере части тела субъекта;
определения второго взвешенного центроида второй области, окружающей первый взвешенный центроид; и
отображения по меньшей мере части первой проекции структуры на изображении на основе положения второго взвешенного центроида относительно положения первого взвешенного центроида;
определения четвертого взвешенного центроида четвертой области, окружающей вторую точку на изображении, при этом вторая точка расположена рядом с первой точкой;
определения пятого взвешенного центроида пятой области, окружающей четвертый взвешенный центроид;
отображения по меньшей мере части второй проекции структуры на изображении на основе положения четвертого взвешенного центроида относительно положения пятого взвешенного центроида и сравнения первой проекции и второй проекции для выявления по меньшей мере одной линии хребта структуры на изображении.
15. Устройство (100) по п. 14, в котором процессор (102) выполнен с возможностью управления одним или более пользовательскими интерфейсами (104) с целью подготовки для просмотра отображенной по меньшей мере части первой проекции структуры на изображении.
| Yang G et al., "A Multiscale Tracking Algorithm for the Coronary Extraction in MSCT Angiography", Engineering in Medicine and Biology Society (EMBC), 2013, 34th Annual International Conference of the IEEE, Vol:1, Page(s):3066 - 3069 | |||
| Vyas Akondi et al., "Improved iteratively weighted centroiding for accurate spot detection in laser guide star |

