Настоящее изобретение относится к формированию изображений в области медицины, и более конкретно к диагностической или интервенционной системе управления для оптимизации или адаптации характеристик формирования изображений, например, вида при формировании изображений, частоты получения кадров, и т.д.
Существует широкий диапазон медицинских процедур, которые включают в себя введение устройства в тело человека под рентгеновским наведением. Эти процедуры включают в себя направляющие катетеры, чтобы выполнять сосудистые процедуры, такие как размещения стентов, и иглы, чтобы выполнить удаление и биопсию ткани. Рентгеновская флуороскопия может иметь большое значение при идентификации анатомических ориентиров в известных положениях относительно целевого положения для устройства. С помощью рентгеновской флуороскопией врачи могут получать одно изображение или множество изображений в быстрой последовательности (например, в качестве видео).
При использовании множества изображений в быстрой последовательности существует риск того, что рентгеновское облучение для врача и пациента будет значительно большим, чем необходимо для процедуры, которую следует выполнять эффективно. Это может следовать из получения изображений, выполняемых когда: a) устройство не передвигается на существенное расстояние относительно разрешения изображения; и/или b) устройство передвигается преимущественно в направлении, перпендикулярном плоскости формирования изображений, и таким образом происходит небольшое очевидное перемещение устройства внутри проекционного изображения.
В обоих случаях использование множества рентгеновских изображений, вероятно, не будет обеспечивать какой-либо пригодной клинической информации, однако это подвергнет воздействию на пациента и врача более высокими рентгеновскими дозами. Пациент, подвергающийся одной процедуре, возможно, не подвергается высокому риску вредных действий рентгеновских лучей, но для врачей, которые выполняют много процедур каждый день, понижение дозы чрезвычайно важно, и это представляет собой проблему, которую многие врачи серьезно осознают. Уменьшение рентгеновского облучения в частности важно при таких способах воздействия, как кинофлюорография, в которой используются более высокие дозы относительно флуороскопии с низкой дозой.
Во время интервенционных процедур, выполняемых под рентгеновским флуороскопическим наведением, может быть получено значительно больше изображений, чем это необходимо, чтобы эффективно выполнять процедуры. Такие результаты без всякой необходимости увеличивают облучение вредными рентгеновскими лучами врачей и пациентов. Кроме того, во время интервенционных процедур, характеристики формирования изображений обычно обновляются вручную персоналом клиники, например, чтобы попытаться оптимизировать поворот рентгеновской рамки, высоту датчика, местоположение стола и т.д. для оптимального рассмотрения интервенционного поля и интересующей анатомии. Для основанной на магнитном резонансе (MR) процедуры, планы сканирования предписываются технологом MR, работающим с командой врачей. Эти ручные регулировки часто приводят к менее, чем оптимальным клиническим последовательностям выполняемых действий и могут приводить к менее, чем оптимальному качеству изображения.
В соответствии с настоящими принципами действия, система и способ для адаптивного формирования изображений включают в себя систему определения местоположения или распознавания формы, соединенную с интервенционным устройством, чтобы измерять пространственные характеристики интервенционного устройства или другой интересующей цели в объекте. Модуль получения изображений выполнен с возможностью приема пространственных характеристик и формирования одного или более сигналов управления в соответствии с пространственными характеристиками. Устройство формирования изображений выполнено с возможностью формирования изображений объекта в соответствии с сигналами управления.
Рабочая станция включает в себя процессор и память, соединенную с процессором. Память хранит модуль распознавания формы и модуль изображения. Модуль распознавания формы выполнен с возможностью определения пространственных характеристик интервенционного устройства. Модуль изображения выполнен с возможностью регулировки устройства формирования изображений в соответствии с пространственными характеристиками, чтобы обеспечить настройки сбора изображений, пригодные для данной медицинской процедуры.
Способ, в соответствии с настоящими принципами действия, включает в себя этапы, на которых распознают форму интервенционного устройства, чтобы измерить пространственные характеристики интервенционного устройства в объекте; формируют один или более сигналов управления в соответствии с пространственными характеристиками; и регулируют устройство формирования изображений, чтобы сформировать изображение объекта в соответствии с сигналами управления.
Эти и другие цели, признаки и преимущества настоящего изобретения станут очевидными из нижеследующего подробного описания его иллюстративных вариантов осуществления, которое следует читать совместно с сопровождающими чертежами.
Далее в настоящем раскрытии будет приведено нижеследующее подробное описание предпочтительных вариантов осуществления со ссылкой на следующие фигуры, в которых:
Фиг. 1 является блок-схемой/схемой последовательности операций, на которой показана система для адаптивного формирования изображений в соответствии с одним иллюстративным вариантом осуществления;
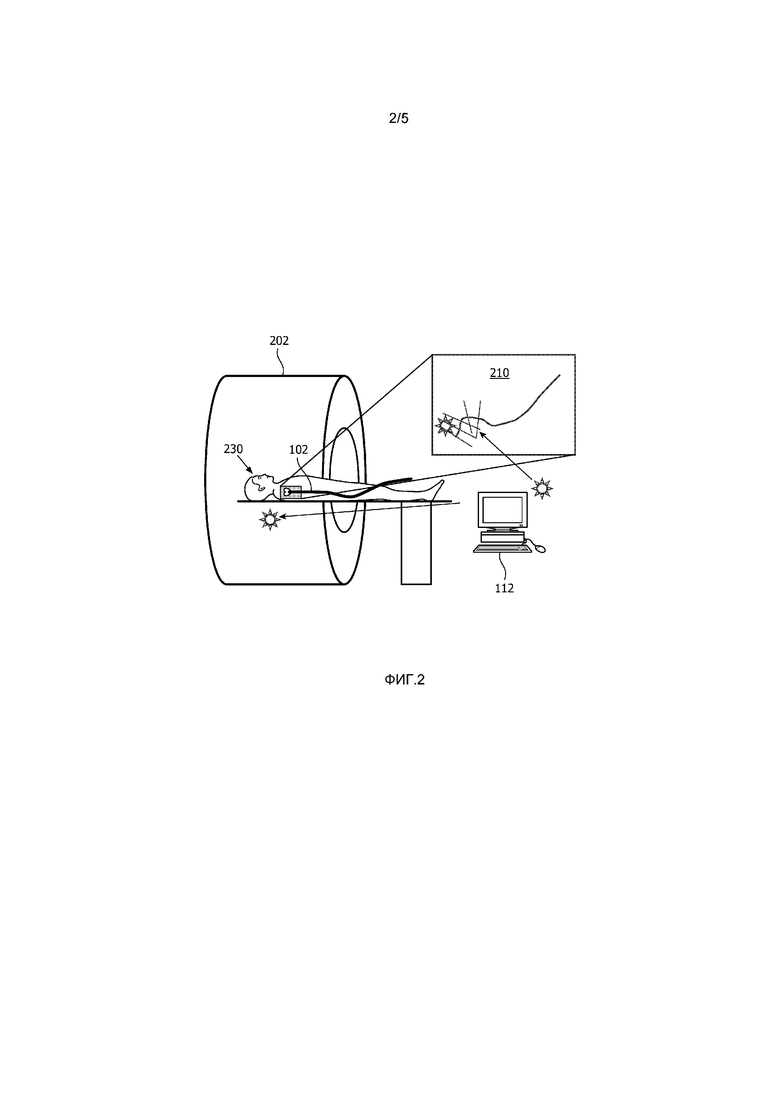
Фиг. 2 является схемой, на которой показана магниторезонансная система для адаптивного формирования изображений в форме изменяемого предписываемого сканирования в соответствии с одним иллюстративным вариантом осуществления;
Фиг. 3 является блок-схемой/схемой последовательности операций, на которой показан модуль получения изображений для решения, получить ли новое изображение или нет, в соответствии с одним иллюстративным вариантом осуществления;
Фиг. 4 является блок-схемой/схемой последовательности операций, на которой показано изображение, имеющее метку, сформированную чтобы заменить необходимость в получении нового изображения, в соответствии с одним иллюстративным вариантом осуществления;
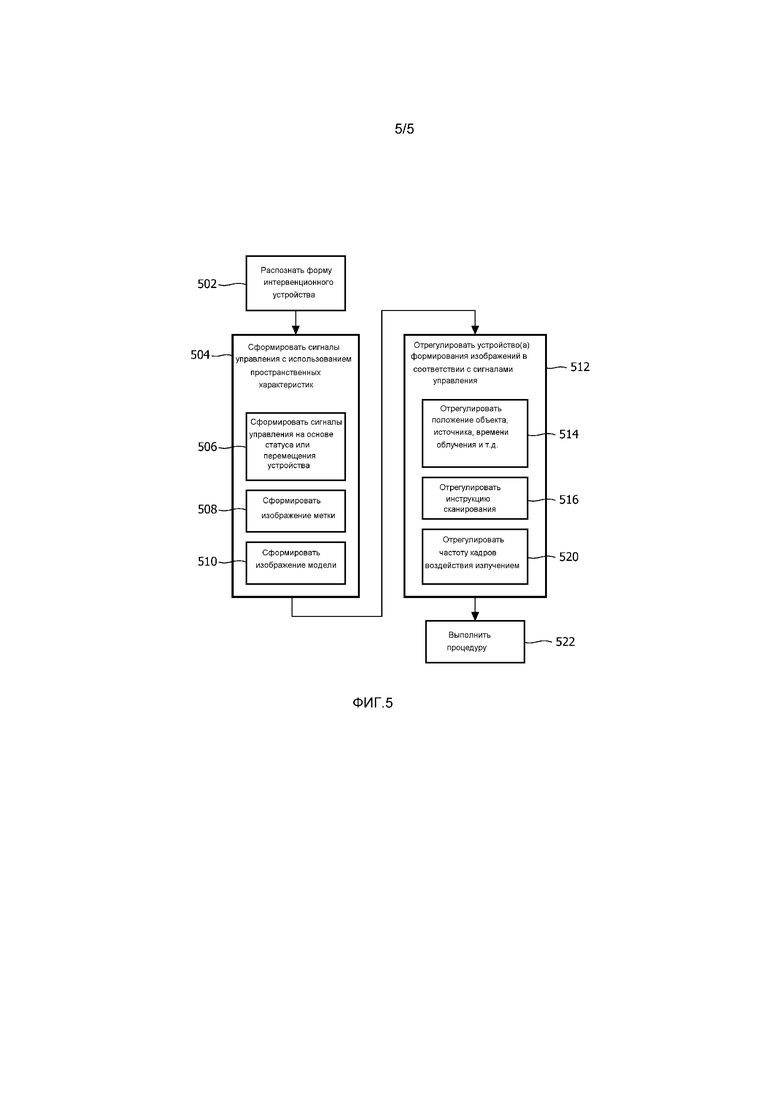
Фиг. 5 является блок-схемой, на которой показаны этапы для адаптивного формирования изображений в соответствии с иллюстративным вариантом осуществления настоящего изобретения.
Принципы настоящего изобретения обеспечивают системы и способы для информации о форме в режиме реального времени, выведенной из медицинского устройства, или другой цели, прослеживаемой в организме, например, с помощью распознавания формы оптоволокна или с помощью системы электромагнитного измерения ориентации и положения или другой подобной платформой определения местоположения. Информация о форме может использоваться, чтобы динамически адаптировать частоту кадров или другую характеристику формирования изображений или функциональные средства системы формирования изображений, например, рентгеновской (флуороскопической) системы. Частота кадров адаптируется, например, чтобы минимизировать рентгеновское облучение врачей и пациентов, во время обеспечения точной визуализации устройства, например, на виде с минимальным ракурсом посредством автоматического расположения рамки на основе информации о местоположении, выведенной от прослеживаемой цели. Частота кадров может быть адаптирована, чтобы балансировать между временным и пространственным разрешением в случае получения и восстановления магнитно-резонансного (MR) изображения. Если устройство передвинулось только на малое расстояние, с момента получения предыдущего флуороскопического изображения, то новое флуороскопическое изображение не может быть получено, но метка, указывающая на новую форму и/или местоположение устройства, может быть наложена на предыдущее флуороскопическое изображение.
Данные о движении, измеренные от инструмента, могут представлять собой доминирующее изменение внутри интервенционного рабочего пространства и могут использоваться с предшествующими данными кадра формирования изображений, чтобы вычислить новое изображение с элементами инструмента, представленными правильно. Система компьютерной томографии (CT) может использоваться для отслеживания инструмента вместо флуороскопической системы. В варианте осуществления, использующем формирование магнитно-резонансных изображений (MRI), независимо полученная информация о перемещении инструмента может быть возвращена обратно в получение последовательности импульсов MRI, чтобы автоматически адаптировать последовательности, чтобы увеличить отношение сигнал-шум (SNR) сканирования или пространственное разрешение в течение временных интервалов, в которых присутствует небольшое изменение в движении инструмента (и наоборот). Для ультразвука зонд может быть автоматически манипулируемым или может быть выполнен с возможностью оптимизации качества полученного ультразвукового изображения локализованной цели. Точно так же способы ядерного формирования медицинских изображений могут использовать информацию о местоположении по отношению к цели, чтобы оптимизировать расположение датчиков для максимального SNR. Информация для оптимизации может возвращаться обратно по автоматизированному контуру управления с обратной связью, или может быть отображена визуально в пользовательском интерфейсе для конфигурирования системы вручную.
Информация о форме в режиме реального времени (например, от распознавания формы оптоволокна или электромагнитного распознавания положения и ориентации) для медицинского инструментария, прослеживаемого в организме, используется, чтобы динамически адаптировать характеристики системы формирования изображений, чтобы гарантировать оптимальную визуализацию, навигацию устройства, и планирование вмешательства (интервенции) внутри требуемого поле обзора. Настоящие принципы действия упрощают формирование изображения и улучшают получение данных для множества способов воздействия при формировании изображения. Например, в одном варианте осуществления, в интервенционных рентгеновских системах, отслеживаемое интервенционное устройство, такое как коронарный проволочный направитель катетера, вставленный в сосудистую систему, обеспечивает оперативные данные формы/положения/ориентации о наконечном сегменте и таким образом позволяет осуществлять автоматизированные регулировки стола (панорамирование/высота) или повороты рамки с C-образным кронштейном, чтобы сохранить сегмент оптимально визуализированным внутри рентгеновского поля зрения. В одном примере эти регулировки автоматически гарантируют, что коронарный сосуд и проволочный направитель катетера поддерживаются на виде с минимальным ракурсом, поскольку выполняется коронарная интервенция. Обеспечиваются автоматизированное задание характеристик системы формирования изображений и усовершенствованная организация рабочего процесса в клинике при оптимизации качества получаемых изображений.
Элементы, изображенные на Фигурах, могут быть реализованы в различных сочетаниях аппаратных средств и обеспечивают функции, которые могут быть объединены в одном элементе или множестве элементов. Следует понимать, что настоящее изобретение будет описано с точки зрения медицинских инструментов; однако замысел настоящего изобретения намного более широк и применим к любым инструментам, используемым при отслеживании или анализе комплексных биологических или механических систем. В частности настоящие принципы действия применимы к процедурам внутреннего отслеживания биологических систем, процедурам во всех областях тела, таких как легкие, желудочно-кишечный тракт, органы выделения, кровеносные сосуды и т.д. Элементы, изображенные на Фигурах, могут быть реализованы в различных сочетаниях аппаратных и программных средств и обеспечить функции, которые могут быть объединены в одном элементе или множестве элементов.
Функции различных элементов, показанных на Фигурах, могут быть обеспечены путем использования выделенных аппаратных средств, а так же аппаратных средств, способных к исполнению программного обеспечения совместно с соответствующим программным обеспечением. Когда функции реализуются процессором, они могут быть предоставлены одним выделенным процессором, одним совместно используемым процессором, или множеством индивидуальных процессоров, некоторые из которых могут использоваться совместно. Кроме того, явное использование термина «процессор» или «контроллер» не должно толковаться как относящееся исключительно к аппаратным средствам, способным к выполнению программного обеспечения, а может неявно включать в себя, без ограничения, аппаратные средства цифрового сигнального процессора ("DSP"), постоянное запоминающее устройство ("ROM") для хранения программного обеспечения, память с произвольным доступом ("RAM"), устройство долговременное хранение и т.д.
Кроме того, все утверждения в данном документе, излагающие принципы действия, аспекты и варианты осуществления изобретения, а так же конкретные его примеры, предназначаются, чтобы охватить как структурные, так и функциональные его эквиваленты. Дополнительно, подразумевается, что такие эквиваленты включают в себя как известные в настоящее время эквиваленты, так и эквиваленты, которые будут разработаны в будущем (то есть любые разработанные элементы, которые выполняют ту же самую функцию, независимо от строения). Таким образом, например, специалистам в уровне техники будет понятно, что блок-схемы, представленные в данном документе, представляют собой концептуальные виды иллюстративных компонентов системы и/или электрических схем, воплощающих принципы действия изобретения. Точно так же будет понятно, что любые блок-схемы последовательности операций, структурные схемы и т.п. представляют собой различные процессы, которые могут быть по существу представлены в машиночитаемых носителях хранения информации и таким образом выполняться компьютером или процессором вне зависимости от того, показаны ли такие компьютеры или процессоры явно или нет.
Кроме того, варианты осуществления настоящего изобретения могут принять форму компьютерного программного продукта, доступного с используемого компьютером или считываемого компьютером носителя хранения информации, предоставляющего программный код для использования посредством или совместно с компьютером или любой системой исполнения команд. Для целей данного описания используемый компьютером или считываемый компьютером носитель хранения информации может быть любым устройством, которое может включать в себя, хранить, передавать, распространить или перемещать программу для использования посредством или совместно с системой исполнения команд, оборудованием или устройством. Носитель может быть электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой (или оборудованием или устройством) или средой распространения. Примеры считываемого компьютером носителя включают в себя полупроводниковую или твердотельную память, магнитную ленту, съемную компьютерную дискету, память с произвольным доступом (RAM), постоянное запоминающее устройство (ROM), твердый магнитный диск и оптический диск. Современные примеры оптических дисков включают в себя компакт-диск с постоянной памятью (CD-ROM), компакт-диск с чтением-записью (CD-R/W) и DVD.
С появлением устойчивых механизмов и механизмов в режиме реального времени для встроенного определения местоположения медицинских инструментов внутри интервенционной установки, например, с системами электромагнитного слежения следующего поколения или распознаванием формы волокна, информация о форме и/или местоположении устройства предоставляется процессору, чтобы автоматически оптимизировать скорость, с которой флуороскопические изображения получаются во время интервенций. Отслеживание инструмента может быть выполнено посредством основанного на оптоволокне распознавания деформаций, которые могут быть интегрированы по длине для локальной оценки формы. Основанные на оптоволокне измерения геометрии будут описаны в соответствии с настоящими принципами действия по меньшей мере по следующим причинам. Основанные на оптоволокне измерения устойчивы к электромагнитным помехам и не требуют никаких электромагнитных излучений. Связанные чувствительные элементы пассивны и поэтому по существу безопасны. Возможность мультиплексировать чувствительные элементы существует в массиве чувствительных элементов. Предоставляется возможность распознавания множества параметров (деформации, температуры, давления и т.д.) и распределенного распознавания. Чувствительные элементы обладают высокой чувствительностью (например, вплоть до нанодеформаций, когда интерферометрия используется при опросе оптических сигналов). Оптоволокно является малым, легковесным, идеальным для применений в минимальной инвазии, и нечувствительным к изменению амплитуды сигнала (например, когда волоконные чувствительные элементы Брэгга используются с обнаружением длины волны).
Технология основанного на оптоволокне распознавания формы предлагает высокоточное определения местоположения с высокой четкостью и с высоким пространственно-временным разрешением вдоль волокна. Принимая во внимание легкий вес, удлиненный форм-фактор оптоволокна и его компактная площадь поперечного сечения, данная оптоволоконная технология хорошо подходит к использованию внутри медицинского оборудования настоящих принципов действия, хотя другие технологии также могут использоваться. Например, отслеживание может также быть выполнено посредством систем электромагнитного отслеживания (EM), которые остаются устойчивыми в смешивающихся проводящих структурах в интервенционной среде.
В одном варианте осуществления управление частотой, с которой получаются изображения, предоставляется посредством отслеживания перемещения интервенционного устройства в режиме реального времени и получения изображений только тогда, когда присутствует существенное перемещение устройства в формирующей изображение плоскости. Данная проблема автоматической регулировки частоты кадров неверно рассматривается посредством только формирования изображений. Если бы обработка изображений использовалась, чтобы отслеживать характеристики движения устройства, то частота кадров могла бы быть уменьшена, чтобы соответствовать медленно движущемуся инструменту. Однако, при более низкой частоте выборки, может возникнуть временное искажение, когда устройство начинает передвигаться более быстро, приводя к задержке и неверному представлению движения устройства, пока частота получения кадров не увеличивается снова. Независимое отслеживание движения посредством основанного на оптоволокне распознавания или измерений EM следующего поколения может способствовать решению этих проблем.
Оптимальное расположение поворотов и плоскостей сканирования получения изображений необходимо для точного слежения за интервенционными процедурами. С появлением устойчивых механизмов и механизмов реального времени для интегрированного определения местоположения медицинских инструментов внутри интервенционной установки, такой как система с распознаванием формы оптоволокна или система электромагнитного слежения следующего поколения, измеренные данные отслеживания соединяются в контуре управления с обратной связью с системой получения изображений, чтобы сделать возможным автоматизированному манипулированию характеристиками системы формирования изображений оптимизировать сканирование во время интервенций. Отслеживание инструмента следующего поколения может быть выполнено посредством основанного на оптоволокне распознавания деформаций, которые могут быть интегрированы вдоль длины для локальной оценки формы. Форма инструмента и данные местоположения могут быть переданы в потоке в режиме реального времени на пульт управления системы формирования изображений для автоматизации и/или оптимизации характеристик сканирования.
Обратимся теперь к чертежам, на которых одинаковые цифры представляют одни и те же или подобные элементы, и прежде всего к Фиг. 1, на которой иллюстративно изображена адаптивная система 100 формирования изображений, реагирующую на обратную связь от интервенционного инструмента. Система 100 включает в себя отслеживаемое медицинское устройство или инструмент 102, используемый во время интервенционной процедуры внутри объекта 131. Инструмент 102 может включать в себя катетер, провод, иглу или другое интервенционное устройство. Инструмент 102 может включать в себя систему 104 определения местоположения или распознавания формы. Система 104 распознавания формы отслеживает форму инструмента, положение и/или измерения ориентации. Система 104 распознавания формы может включать в себя волоконно-оптическую систему распознавания формы (например, с волоконными решетками Брэгга или рассеивателями Рэлея), систему слежения EM или другую систему слежения.
Если волоконно-оптическая система используется как система 104 распознавания формы, то источник 106 оптических сигналов используется для освещения волокна распознавания формы. Блок 108 опроса оптических сигналов используется, чтобы обнаружить свет, возвращающийся со всех волокон. Это делает возможным определение деформаций или других параметров, которые будут использоваться, чтобы интерпретировать форму, ориентацию и т.д. интервенционного устройства 102. Световые сигналы будут использоваться как обратная связь, чтобы вносить регулировки в другие системы, такие как системы 110 формирования изображений.
Система 100 может включать в себя рабочую станцию или пульт 112 управления, который предоставляет множество инструментов и функций для того, чтобы выполнить процедуру в соответствии с настоящими принципами действия. Рабочая станция или пульт 112 управления могут предоставить хирургические инструменты, средства управления, источники энергии, интерфейсы и т.д. В частном полезном варианте осуществления рабочая станция 112 включает в себя процессор 114, память 116, устройство 118 отображения и пользовательский интерфейс 120. Процессор 114 реализует модуль 115 оптического распознавания в режиме реального времени для распознавания формы волокна, положения, ориентации волоконных пучков.
В альтернативном варианте осуществления система 104 распознавания формы использует электромагнитное (EM) отслеживание. В данном варианте осуществления используются генератор электромагнитного (EM) поля и блок 122 управления. EM катушка(и) 124 встраивается/встраиваются внутри отслеживаемого медицинского инструмента 102 во множестве местоположений. Следует понимать, что EM отслеживание и распознавание формы оптоволокна могут использоваться отдельно или вместе. Могут также использоваться другие системы и устройства распознавания формы. Процессор 114 реализует EM отслеживание в режиме реального времени и модуль 117 распознавания для распознавания формы, положения, ориентации интервенционных инструментов 102. Процессор 114 и модули 115 и/или 117 распознают форму инструмента, положение и ориентацию с использованием оптических и/или отслеживающих EM сигналов (например, компенсация искажения поля EM). Альтернативные системы слежения на основе других физических принципах действия, например, акустического, инфракрасного, формирования изображений и обработки изображений и т.д. могут также использоваться с отслеживаемыми элементами, которые могут быть включены в состав медицинских инструментов и использоваться в организме.
Система 110 формирования изображений используется для слежения за процедурой, наведением интервенции, и т.д. Система 110 формирования изображений может включать в себя флуороскопическую систему, магнитно-резонансную систему, систему компьютерной томографии и т.д. Программа оптимизации формирования изображений или модуль 130 хранятся в памяти 116 или могут быть храниться в системе 110 формирования изображений. Программа 130 оптимизации формирования изображений реализует способы в режиме реального времени, чтобы вывести оптимальные характеристики системы формирования изображений на основе положении инструмента в режиме реального времени, ориентации и информации о форме.
Один или несколько программируемых исполнительных элементов/приводов 134 реагируют на сигналы, отправленные от процессора 114, как определено программой 130 оптимизации формирования изображений. Приводы 134 изменяют атрибуты системы формирования изображений или характеристики системы формирования изображений на основе положения инструмента в режиме реального времени, ориентации и информации о форме и обратной связи.
Соединение 136 передачи данных соединяется с процессором 114 и переносит сигналы управления в блок 138 управления системой формирования изображений. Сигналы управления формируются на основе интерпретаций системы 104 распознавания формы инструмента. Сигналы, выведенные системой 104 распознавания формы, интерпретируются модулями 115 и/или 117, и результаты применяются к программе 130 оптимизации формирования изображений, которая оптимизирует характеристики системы 110 формирования изображений. Блок 138 управления и приводы 134 регулируется, чтобы вносить изменения в конфигурацию устройства формирования изображений, чтобы оптимизировать сбор изображений. Например, приводы 134 могут регулировать поворот рамки, инструкции сканирования MR, время облучения, частоту кадров, и т.д. Система 104 распознавания формы обеспечивает данные о форме в режиме реального времени, данные местоположения или информацию, выведенную из таких данных (например, плоскостей сканирования, перпендикулярных продольной оси оптического волокна) в процессор 114 для автоматизированного адаптивного управления геометрией системы формирования изображений или других атрибутов системы формирования изображений. Это может включать в себя облучение источника рентгеновского излучения, частоту кадров, пиктограммы или устройства отображения, видео инструменты или другие характеристики системы формирования изображений.
В одном варианте осуществления направляемые рентгеновским излучением интервенции могут быть упрощены посредством соединения характеристик системы рентгеновского излучения, например, положение стола, поворот рамки и т.д., с помощью системы 104 слежения и распознаванием формы. Извлеченная информация от системы 104 слежения используется для оптимальной визуализации отслеживаемого медицинского инструмента, например, отслеживаемый коронарный проволочный направитель катетера или внутривенный ультразвуковой (IVUS) катетер внутри интересующей анатомии динамически прослеживается рентгеновским датчиком в режиме «следуй за мной», который делает возможной визуализацию коронарного кровообращения с минимальным ракурсом в любой заданный момент.
Продолжая принимать во внимание Фиг. 1, обратимся к Фиг. 2 на которой иллюстративно показан вариант осуществления MR. Отслеживание в этом случае будет с помощью распознавания (104) оптоволокна при условии, что современные системы электромагнитного отслеживания не функционируют точно в присутствии магнита MR в устройстве 202 сканирования MR. Внешнее отслеживание является привлекательным, так как основанное на MR отслеживание нуждается в дополнительном чередовании последовательностей импульсов определения местоположения, которые представляют собой дополнительные издержки получения и обработки. Это уменьшает частоты кадров, доступных для наведения интервенции.
Отслеживаемые данные, полученные от манипулируемого инструмента 102, возвращаются обратно автоматически в рабочую станцию 112, которая вычисляет новые инструкции 210 сканирования на основе формы интервенционного инструмента 102. Инструкции 210 сканирования фокусируют действия по формированию изображений на конкретной части или интересующей области пациента 230. Возможные инструкции сканирования могут включать в себя автоматизированное нелинейное сканирование вдоль продольной оси инструмента 102 (например, коронарного катетера или проволочного направителя катетера), потенциально для формирования объемных изображений коронарного кровообращения или автоматизированного «живого» получения плоскостей формирования интервенционных изображений, которые динамически следуют за системой координат наконечника инструмента. В других вариантах осуществления инструкции сканирования могут включать в себя дополнительное разрешение или углы обзора для конкретной интересующей точки на основе обратной связи от системы 104 распознавания формы. Например, устройство 102 включает в себя катетер с наконечником, предоставляющим систему координат. Автоматизированное формирование инструкций сканирования определяется, например, для получения плоскости нелинейного сканирования с использованием наконечника катетера в качестве опорной точки или для живого получения плоскостей интервенционного сканирования относительно положения наконечника катетера. Дополнительно преимущества включают в себя инструкции автоматизированного сканирования нелинейных траекторий при формировании изображений анатомических строений, которые лежат параллельно оси инструмента 102, учитывая минимизацию воздействий парциального объема (например, формирование изображений стенки сосуда с MRI при использовании совместно с отслеживаемым коронарным проволочным направителем катетера).
Снова обратимся к Фиг. 1 - в случае, когда множество инструментов отслеживается в одной и той же процедуре, программа 130 оптимизации формирования изображений выводит характеристики формирования рентгеновских изображений, которые оптимальны либо для a) визуализации одного из отслеживаемых инструментов (102), либо для b) визуализации двух или более отслеживаемых инструментов. Метрики, использованные для оптимизации в случае a) могут отличаться от метрик, используемых в случае b). Например, в случае b), метрики могут включать в себя оптимизацию для визуализации взаимосвязей между положениями двух или более из отслеживаемых инструментов.
Выходной сигнал модулей 115 и/или 117 определения формы может включать в себя оценки погрешности, связанной с параметрами формы отслеживаемого инструмента(ов) 102. В этом случае, скорость изменения характеристик формирования изображения может быть сделана зависящей от амплитуд тех погрешностей. Например, если форма инструмента изменяется быстро и присутствуют большие погрешности при измерении формы, то система 110 формирования изображений не будет реагировать (или будет реагировать очень медленно), пока погрешности значительно не уменьшатся в амплитуде.
В случае, где используется множество систем 110 формирования изображений одновременно для комбинированного наведения (например, комбинация рентгеновского излучения, ультразвука (US), CT, MR и т.д.), программа 130 оптимизации формирования изображений выводит характеристики формирования изображений, которые оптимальны для визуализации с помощью одной из систем 110 формирования изображений, или с помощью двух или более из систем 110 формирования изображений. Метрики, используемые для оптимизации одной системы, могут отличаться от метрик, используемых при оптимизации множества систем формирования изображений.
Настоящие варианты осуществления имеют отношения ко всем способам воздействия формирования изображений, для которых параметры сканирования или атрибуты систем должны регулироваться для интервенционного слежения. Аналогично, любые медицинские процедуры, выполняемые под наведением с помощью изображений, для которых отслеживание данных от используемых инструментов может дополнительно улучшить производительность формирования изображений или клиническую последовательность выполняемых действий.
Модули 115 и/или 117 распознают форму, положение и ориентацию отслеживаемого инструмента 102. Модули 115 и/или 117 реализуют алгоритмы реального времени для измерений ориентации, положения и формы инструмента. Программа получения изображений или модуль 140 присутствуют, чтобы оптимизировать частоту, с которой получаются рентгеновские снимки на основе перемещения, положения, ориентации и т.д. интервенционного устройства 102. Модуль 140 может быть частью модуля 130 или может быть отдельным модулем (как изображено на Фиг. 1). Данные предоставляются между системой 104 распознавания формы и модулем 140 получения изображений так, чтобы информация о форме и местоположении устройства 102 могла быть предоставлена в модуль 140 получения изображений 140 в режиме реального времени, чтобы оптимизировать частоту, с которой получаются рентгеновские изображения. Модуль 140 получения изображений формирует сигналы, которые отправляются через соединение 136 передачи данных к блоку 138 управления системы 110 изображения. Частотой получения изображений управляют в соответствии с обратной связью от положения, движения и использования интервенционного устройства 102.
Продолжая принимать во внимание Фиг. 1, обратимся к Фиг. 3, на которой блок-схема изображает блок-схему/схему последовательности операций для модуля 140 получения изображений в соответствии с одним иллюстративным вариантом осуществления. Интервенционное устройство 102 предоставляет сигналы распознавания формы в модули 115 и/или 117, которые выводят информацию о форме и/или местоположении интервенционного устройства 102. В блоке 302, модуль 140 получения изображений определяет, должно ли быть получено еще одно флуороскопическое изображение (или другое изображение). Определение делается на основе различных критериев относительно того, должно ли новое изображение быть получено в блоке 305 или не получено в блоке 307. В одном варианте осуществления определение включает в себя любое перемещение интервенционного устройства в блоке 304. Если устройство передвигается, тогда получают новое изображение. Информация в режиме реального времени о форме и/или местоположении интервенционного устройства 102 выводится независимо от информации об изображении, предоставляемой посредством системы 110 формирования изображений. В данном варианте осуществления выбор из двух альтернатив осуществляется модулем 140 получения изображений. Если устройство передвинулось значительно с того моменте, когда было получено предыдущее флуороскопического изображения, то получают новое флуороскопическое изображение. Иначе флуороскопическое изображение не получают.
В другом варианте осуществления дополнительное определение того, насколько интервенционное устройство 102 передвинулось, выполняется в блоке 306. Если данное перемещение превышает пороговую величину, тогда получают новое изображение. Иначе не получают нового изображения. В еще одном варианте осуществления тип перемещения определяется в блоке 310. Если тип перемещения, например, сложное сгибание, кумулятивное смещение, вращение, изгиб и т.д., достигается посредством интервенционного устройства 102, тогда получают новое изображение. Иначе не получают нового изображения. В еще одном варианте осуществления частота получения или получение изображений могут изменяться на основе состояния, использования или функционирования интервенционного устройства в блоке 308. Например, если интервенционное устройство является устройством удаления, частота получения может быть изменена с началом удаления.
В одном примере, если устройство 102 передвигается только на малое расстояние, с момента как было получено предыдущее флуороскопическое изображение (при том что определение «малое расстояние» задается на основе предпочтении врача), то новое флуороскопическое изображение не получают (блок 307), но метка, указывающая на новую форму и/или местоположение устройства 102, накладывается на предыдущее флуороскопическое изображение в блоке 312.
Обратимся к Фиг. 4, на которой схема изображает пример отображения 402, созданного с метками 404, указывающими новую форму и/или местоположение устройства 102. На изображение гибкого устройства (например, катетера) 102, в том виде каким оно получается посредством флуороскопии, накладываются окружности (метки 404), которые указывают обновления местоположения наконечника устройства, полученные от системы 104 распознавания формы. Штриховая окружность 406 указывает более позднее местоположение наконечника устройства. Окружности (404) предоставляются в качестве обновлений к отображению 402 без получения новых флуороскопическых изображений. Диаметр окружности может указывать позиционную неопределенность (например, погрешность). На отображении 402 данного примера показано только местоположение наконечника, но могут предоставляться и другие отображения 402, которые указывают дополнительную информацию, полученную из системы 104 распознавания формы (например, форма устройства).
Снова обратимся к Фиг. 3, на которой в блоке 314, другой вариант осуществления использует вычислительную обработку/моделирование кадров изображения на основе предыдущих полученных кадров и измеренной деформации формы медицинского инструмента от основанного на оптоволокне распознавания формы или отслеживания EM следующего поколения. Данные о движении, измеренные от инструмента 102, представляют собой доминирующее изменение внутри интервенционного рабочего пространства и могут использоваться совместно с данными предшествующего кадра формирования изображения, чтобы вычислить новое изображение с элементами инструмента, представленными правильно внутри. Данный подход может использоваться, чтобы достигнуть высокой экстраполяции или интерполяции частоты кадров от получений рентгеновского излучения (или CT) низкой частоты кадров (низкой дозы). Модель интервенционного устройства на изображении передвигается постепенно, чтобы избежать необходимости в большем количестве получений изображений. Это может понизить воздействие излучением.
В другом варианте осуществления система CT (или другая система) используется для отслеживания инструмента вместо флуороскопической системы. С помощью системы CT рентгеновское облучение в целом намного больше облучения флуороскопической системы, таким образом проблема уменьшения рентгеновского облучения может быть более важной.
В еще одном варианте осуществления MR балансирует между SNR, пространственным разрешением и временным разрешением. Используя отслеживаемый инструмент 102 на основе быстрого распознавании формы оптоволокна, временная информация об изменении в элементах изображения во время интервенции может быть получена без служебных данных последовательностей импульсов MR, отслеживания. Независимо полученная информация о перемещении инструмента может быть возвращена обратно в получение последовательности импульсов MRI, чтобы автоматически адаптировать последовательности, чтобы увеличить пространственное разрешение или SNR сканирования во время временных интервалов, в которых присутствует небольшое изменение в движении инструмента (и наоборот). Это может привести к меньшему времени формирования изображений и/или улучшенному разрешению при конкретных условиях (например, малое перемещение устройства или отсутствие перемещения).
После того, как модуль 140 получения изображений определил, следует ли получать новое изображение, соответствующий сигнал или сигналы управления формируются и выводятся в устройства (110) формирования изображений в блоке 320. Устройством или устройствами формирования изображений управляют, чтобы получать новые изображения или не получать, соответственно.
Обратимся к Фиг. 5, на которой показана блок-схема/схема последовательности операций, изображающая систему/способ для адаптивного формирования изображений в соответствии с настоящими принципами действия. В блоке 502, распознавание формы интервенционного устройства выполняется, чтобы измерить пространственные характеристики интервенционного устройства в объекте. Распознавание формы может включать в себя основанное на оптоволокне распознавание, электромагнитное распознавание, другой способ распознавания формы или их комбинации. В блоке 504, один или более сигналов управления формируются в соответствии с пространственными характеристиками. Сигналы управления формируются с использованием пространственных характеристик, предоставленных посредством распознавания формы.
В одном варианте осуществления, в блоке 506, сигнал управления формируется для получения изображения на основе по меньшей мере одного из: перемещения интервенционного устройства, перемещения интервенционного устройства за пределами пороговой величины и типа движения интервенционного устройства. В блоке 508, изображение метки может быть сформировано в соответствии с пространственными характеристиками, чтобы указать обновленное положение интервенционного устройства на устройстве отображения. В блоке 510, изображение модели интервенционного устройства может быть сформировано в соответствии с пространственными характеристиками, чтобы указать обновленное положение интервенционного устройства на устройстве отображения. Блоки 508 и 510 исключают или уменьшают частоту получения изображений, так как обновление перемещения интервенционного устройства выполняется искусственно на цифровом изображении.
В блоке 512 устройство или устройства формирования изображений регулируют, чтобы сформировать изображение объекта в соответствии с сигналами управления. В этом случае, форма, положение, ориентация, состояние и т.д. интервенционного устройства используются, чтобы определить настройки, конфигурацию, время/частоту облучения, частоту импульсов и т.д. Например, устройство формирования изображений может включать в себя устройство рентгеновского облучения (флуороскопическое устройство, устройство компьютерной томографии и т.д.). Устройство формирования изображений может регулироваться посредством изменения положения объекта, положения источника рентгеновского излучения, времени облучения и т.д. в блоке 514. Устройство формирования изображений может направляться в соответствии с инструкцией сканирования так, что инструкция сканирования изменяется в соответствии с пространственными характеристиками в блоке 516. Это в частности полезно при использовании MR сканирований. В блоке 520 устройство формирования изображений может регулироваться посредством управления частотой кадров воздействием излучения устройства формирования изображений с использованием сигналов управления на основе пространственных характеристик. В блоке 522 последовательность операций выполняется с использованием адаптивного формирования изображений с обратной связью, как это требуется в соответствии с принципами настоящего изобретения.
При интерпретации прилагаемой формулы изобретения нужно подразумевать что:
a) слово «содержит» не исключает присутствие других элементов или действий помимо перечисленных в определенном пункте формулы изобретения;
b) упоминание элемента в единственном числе не исключает присутствия множества таких элементов;
c) никакое из условных обозначений в формуле изобретения не ограничивает ее объема;
d) несколько «средств» могут быть представлены тем же самым элементом или реализованной аппаратно или программно структурой или функцией; и
e) не предназначено, чтобы требовалось выполнение какой-либо последовательности действий, пока это не указано особым образом.
Описав предпочтительные варианты осуществления для систем и способов адаптивного формирования изображений и оптимизации частоты кадров на основе распознавании в режиме реального времени формы медицинских инструментов (которые представляются иллюстративными, но не ограничивающими), заметим, что в свете вышеупомянутых идей специалистами в данной области техники могут быть выполнены модификации и изменения. Поэтому следует понимать, что в определенных вариантах осуществления раскрытого изобретения могут быть выполнены изменения, которые входят в объем вариантов осуществления, раскрытых в данном документе, определяемый прилагаемой формулой изобретения. Таким образом, после вышеописанных подробностей и особенностей, требуемых патентным законодательством, заявляемое изобретение, для которого испрашивается правовая охрана, удостоверяемая патентной грамотой, охарактеризовано в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБКИЙ КАБЕЛЬ СО ВСТРОЕННЫМИ ДАТЧИКАМИ ДЛЯ ДИНАМИЧЕСКОГО ОТСЛЕЖИВАНИЯ ИНСТРУМЕНТА | 2011 |
|
RU2597136C2 |
| ИНТЕРВЕНЦИОННЫЕ ИНСТРУМЕНТЫ С ПОДДЕРЖКОЙ ОПТИЧЕСКОГО ЗОНДИРОВАНИЯ ДЛЯ БЫСТРЫХ РАСПРЕДЕЛЕННЫХ ИЗМЕРЕНИЙ БИОФИЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2577509C2 |
| СИСТЕМА И СПОСОБ КАРТОГРАФИРОВАНИЯ ДЛЯ МЕДИЦИНСКИХ ПРОЦЕДУР | 2011 |
|
RU2577760C2 |
| ИНТЕГРАЦИЯ ОПТОВОЛОКОННОГО ОПРЕДЕЛЕНИЯ ФОРМЫ В ИНТЕРВЕНЦИОННУЮ СРЕДУ | 2012 |
|
RU2594814C2 |
| МЕДИЦИНСКИЙ ИНТЕРФЕЙС СЛЕЖЕНИЯ, ОБЕСПЕЧИВАЮЩИЙ ИНТЕРВЕНЦИОННУЮ ИНФОРМАЦИЮ | 2013 |
|
RU2635289C2 |
| ИНТРАОПЕРАЦИОННЫЙ МОНИТОРИНГ КАЧЕСТВА СИСТЕМ ОТСЛЕЖИВАНИЯ | 2012 |
|
RU2619990C2 |
| КОМБИНАЦИЯ УЛЬТРАЗВУКОВОЙ И РЕНТГЕНОВСКОЙ СИСТЕМ | 2010 |
|
RU2556783C2 |
| СОВМЕЩЕНИЕ В РЕАЛЬНОМ ВРЕМЕНИ ДЛЯ ЛЕЧЕНИЯ СОСУДОВ | 2010 |
|
RU2535608C2 |
| РЕГИСТРАЦИЯ ДВУМЕРНЫХ/ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ НА ОСНОВЕ ПРИЗНАКОВ | 2008 |
|
RU2568635C2 |
| ИЗУЧЕНИЕ ДОЗИМЕТРИЧЕСКОГО ВОЗДЕЙСТВИЯ ДВИЖЕНИЯ НА ФОРМИРОВАНИЕ АДАПТИВНЫХ ГРАНИЦ ДЛЯ КОНКРЕТНОГО ПАЦИЕНТА ПРИ ПЛАНИРОВАНИИ НАРУЖНОЙ ДИСТАНЦИОННОЙ ЛУЧЕВОЙ ТЕРАПИИ | 2012 |
|
RU2603606C2 |



Изобретение относится к средствам для адаптивного формирования изображений. Технический результат заключается в повышении эффективности формирования изображения. Распознают форму интервенционного устройства, чтобы измерить форму интервенционного устройства в объекте. Формируют один или более сигналов управления в соответствии с информацией о форме в отношении интервенционного устройства. Регулируют устройство формирования изображений для формирования изображения объекта в соответствии с сигналами управления. Устройство формирования изображений включает в себя устройство рентгеновского облучения, и этап регулировки устройства формирования изображений включает в себя этап, на котором регулируют по меньшей мере одно из положения объекта, положения источника рентгеновского излучения и времени облучения. 3 н. и 21 з.п. ф-лы, 5 ил.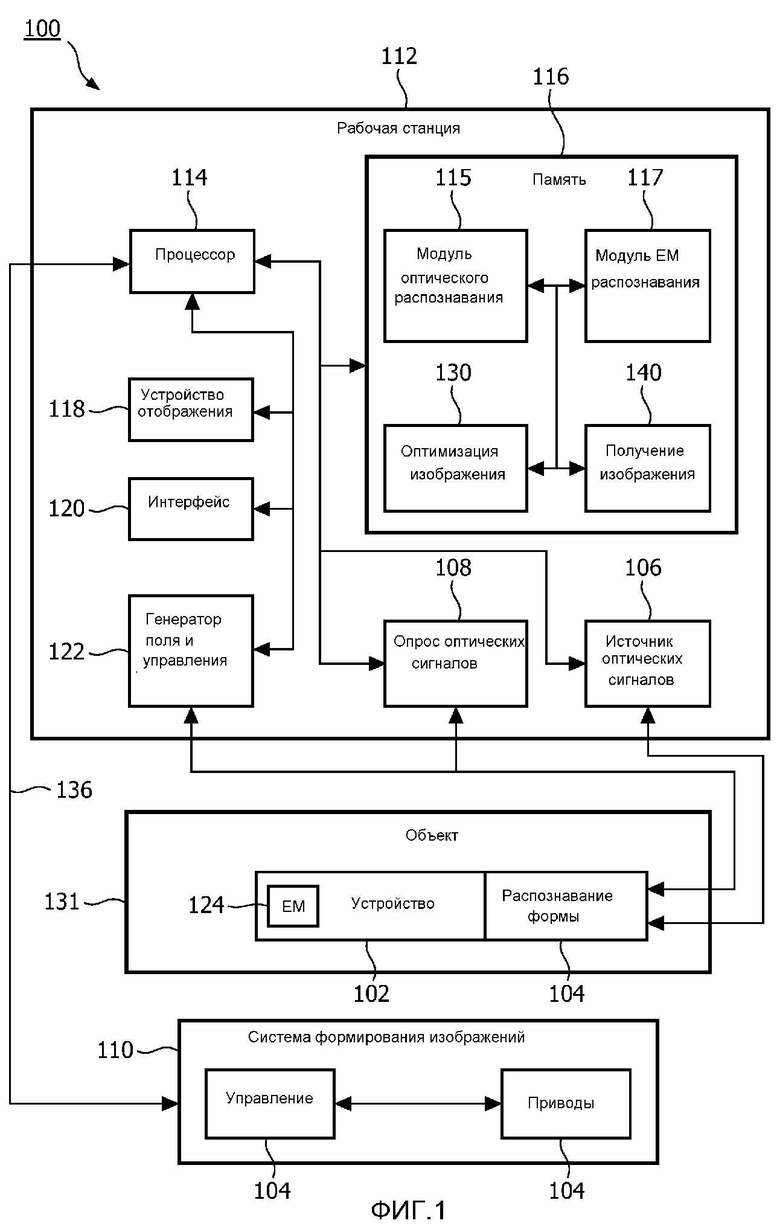
1. Система адаптивного формирования изображений, содержащая:
систему распознавания формы, соединенную с интервенционным устройством и выполненную с возможностью измерения формы интервенционного устройства в объекте;
модуль изображения, выполненный с возможностью приема информации о форме из системы распознавания формы и формирования одного или более сигналов управления в соответствии с информацией о форме; и
по меньшей мере одно устройство формирования изображений, выполненное с возможностью формирования изображений объекта в соответствии с сигналами управления.
2. Система по п. 1, в которой по меньшей мере одно устройство формирования изображений включает в себя устройство рентгеновского облучения, и сигнал управления управляет по меньшей мере одним из положения объекта, положения источника рентгеновского излучения и времени облучения.
3. Система по п. 1, в которой система распознавания формы дополнительно выполнена с возможностью измерения пространственных характеристик, содержащих положение и/или ориентацию интервенционного устройства.
4. Система по п. 3, дополнительно содержащая:
модуль получения изображений, соединённый с модулем изображения, который выполнен с возможностью определения, когда следует получить изображение, на основании по меньшей мере одного из: перемещения интервенционного устройства, перемещения интервенционного устройства за пределами пороговой величины, и типа движения интервенционного устройства;
причём модуль получения изображений выполнен с возможностью формирования изображения метки в соответствии с информацией о форме и/или пространственными характеристиками, причём упомянутое изображение метки выполнено с возможностью указания обновленного положения интервенционного устройства на устройстве отображения.
5. Система по п. 3, дополнительно содержащая:
модуль получения изображений, соединённый с модулем изображения, который выполнен с возможностью определения, когда следует получить изображение, на основании по меньшей мере одного из: перемещения интервенционного устройства, перемещения интервенционного устройства за пределами пороговой величины, и типа движения интервенционного устройства;
причём модуль получения изображений выполнен с возможностью формирования изображения модели интервенционного устройства в соответствии с информацией о форме и/или пространственными характеристиками, причём упомянутое изображение модели выполнено с возможностью указания обновленного положения интервенционного устройства на устройстве отображения.
6. Система по п. 1, в которой система определения местоположения или распознавания формы включает в себя по меньшей мере одну из системы распознавания формы на основе оптоволокна и системы электромагнитного распознавания.
7. Система по п. 1, в которой по меньшей мере одно устройство формирования изображений направляется инструкцией сканирования, сохраненной в памяти, и инструкция сканирования изменяется в соответствии с информацией о форме.
8. Система по п. 1, дополнительно содержащая модуль получения изображений, причём упомянутый модуль получения изображений выполнен с возможностью управления частотой кадров воздействия облучением по меньшей мере одного устройства формирования изображений на основании информации о форме.
9. Рабочая станция для адаптивного формирования изображений, содержащая:
процессор; и
память, соединенную с процессором, при этом в памяти сохранен модуль распознавания формы и модуль изображения,
причем модуль распознавания формы выполнен с возможностью определения формы интервенционного устройства, и
модуль изображения выполнен с возможностью регулировки устройства формирования изображений в соответствии с информаций о форме, принятой от модуля распознавания формы, для обеспечения настроек сбора изображений, пригодных для определенной медицинской процедуры.
10. Рабочая станция по п. 9, в которой устройство формирования изображений включает в себя устройство рентгеновского облучения, и улучшенные изображения обеспечиваются путем выбора по меньшей мере одного из положения объекта, положения источника рентгеновского излучения и времени облучения.
11. Рабочая станция по п. 9, в которой модуль распознавания формы дополнительно выполнен с возможностью измерения пространственных характеристик, содержащих положение и/или ориентацию интервенционного устройства.
12. Рабочая станция по п. 9, дополнительно содержащая:
модуль получения изображений, выполненный с возможностью определения, когда следует получить изображение, на основании по меньшей мере одного из: перемещения интервенционного устройства, перемещения интервенционного устройства за пределами пороговой величины, и типа движения интервенционного устройства; и
устройство отображения, выполненное с возможностью отображения изображений, причём модуль получения изображений выполнен с возможностью формирования изображения метки в соответствии с информацией о форме и/или пространственными характеристиками, которое выполнено с возможностью указания обновленного положения интервенционного устройства на устройстве отображения.
13. Рабочая станция по п. 11, дополнительно содержащая:
модуль получения изображений, соединённый с модулем изображения, который выполнен с возможностью определения, когда следует получить изображение, на основании по меньшей мере одного из: перемещения интервенционного устройства, перемещения интервенционного устройства за пределами пороговой величины, и типа движения интервенционного устройства; и
устройство отображения, выполненное с возможностью отображения изображений, причём модуль получения изображений выполнен с возможностью формирования изображения модели интервенционного устройства, формируемого модулем получения изображений в соответствии с информацией о форме и/или пространственными характеристиками, причём изображение модели выполнено с возможностью указания обновленного положения интервенционного устройства на устройстве отображения.
14. Рабочая станция по п. 9, в которой система распознавания формы включает в себя по меньшей мере одну из системы распознавания формы на основе оптоволокна и системы электромагнитного распознавания.
15. Рабочая станция по п. 9, в которой устройство формирования изображений направляется посредством инструкции сканирования, сохраненной в памяти, и инструкция сканирования изменяется в соответствии с пространственными характеристиками.
16. Рабочая станция по п. 9, дополнительно содержащая модуль получения изображений, причём упомянутый модуль получения изображений выполнен с возможностью управления частотой кадров воздействия излучением устройства формирования изображений на основании информации о форме.
17. Способ адаптивного формирования изображений, содержащий этапы, на которых:
распознают форму интервенционного устройства, чтобы измерить форму интервенционного устройства в объекте;
формируют один или более сигналов управления в соответствии с информацией о форме в отношении интервенционного устройства; и
регулируют устройство формирования изображений для формирования изображения объекта в соответствии с сигналами управления.
18. Способ по п. 17, в котором устройство формирования изображений включает в себя устройство рентгеновского облучения, и этап регулировки устройства формирования изображений включает в себя этап, на котором регулируют по меньшей мере одно из положения объекта, положения источника рентгеновского излучения и времени облучения.
19. Способ по п. 17, в котором:
этап распознавания формы интервенционного устройства также используется для измерения пространственных характеристик интервенционного устройства в объекте, причём пространственные характеристики содержат положение и/или ориентацию ориентационного устройства; и
этап формирования одного или более сигналов управления включает в себя этап, на котором формируют сигнал управления для получения изображения на основании по меньшей мере одного из: перемещения интервенционного устройства, перемещения интервенционного устройства за пределами пороговой величины и типа движения интервенционного устройства.
20. Способ по п. 19, дополнительно содержащий этап, на котором формируют изображение метки в соответствии с информацией о форме и/или пространственными характеристиками для указания обновленного положения интервенционного устройства на устройстве отображения.
21. Способ по п. 17, дополнительно содержащий этап, на котором формируют изображение модели интервенционного устройства в соответствии с информацией о форме и/или пространственными характеристиками для указания обновленного положения интервенционного устройства на устройстве отображения.
22. Способ по п. 17, в котором этап распознавания формы включает в себя этап, на котором используют по меньшей мере одну из системы распознавания формы на основе оптоволокна и системы электромагнитного распознавания.
23. Способ по п. 17, в котором этап регулировки включает в себя этап, на котором направляют устройство формирования изображений посредством инструкции сканирования таким образом, что инструкция сканирования изменяется в соответствии с информацией о форме.
24. Способ по п. 17, в котором этап регулировки устройства формирования изображений включает в себя этап, на котором управляют частотой кадров воздействия излучением устройства формирования изображений с использованием сигналов управления на основании информации о форме.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| RU 2008144533 A, 20.05.2010 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

