Изобретение относится к ракетным двигателям, в которых для управления вектором тяги в полете используются различные органы управления, расположенные у среза сопла или внутри него.
Известно, что на заре развития жидкостных ракетных двигателей (ЖРД) в немецкой ракете ФАУ-2 для управления вектором тяги использовались газовые рули, выполненные из графита и расположенные на срезе сопла. При повороте этих рулей вокруг оси с увеличением площади натекания создается боковое усилие. Развитие ракетной техники потребовало создания более надежных и эффективных органов управления вектором тяги.
Известны газовые рули по патенту США №3251555 и по книге «Конструкция ракетных двигателей на твердом топливе» под общей редакцией Л.Н. Лаврова. – М.: Машиностроение, 1993, стр. 145, которые расположены в полости истекающей струи.
Недостатком является условие работы этих газовых рулей:
- тепловые и эрозионные воздействия высокотемпературного газового потока в течение всего времени работы двигателя;
- наличие механических нагрузок от сверхзвукового потока в течение всего времени работы двигателя.
Известен газовый руль ракетного двигателя, выбранный за прототип, содержащий перо, тарель с цилиндрическим выступом, вал, хвостовик которого с помощью кольцевой выточки через посредство разжимного кольца насажен на выступ тарели. В этой конструкции тарель и перо выполнены из разных деталей (патент России №2251013 F02К 9/80, 2003).
Недостатком данной конструкции является:
- низкая надежность органов управления, так как они все время находятся в высокотемпературном газовом потоке, что приводит к их эрозии и быстрому выгоранию;
- нахождение газовых рулей все время в потоке сопровождается наличием их лобового сопротивления, что снижает удельные энергетические характеристики;
- невозможность получения большой величины бокового управляющего усилия из-за небольшой рабочей поверхности органов управления;
- значительные усилия на рулевых органах.
Предлагаемое изобретение устраняет указанные недостатки прототипа и решает техническую задачу повышения эффективности, ресурса работы и получения большей величины бокового управляющего усилия и уменьшения усилия на рулевых органах.
Поставленная техническая задача решается тем, что в ЖРД, содержащем камеру с охлаждаемой сверхзвуковой частью сопла, рулевые агрегаты и раму, на наружной поверхности охлаждаемой сверхзвуковой части сопла в районе среза выполнено четыре сектора со сферической наружной поверхностью с центром, расположенным на оси камеры, и боковыми стенками, соединяющими сферические поверхности секторов, с наружной поверхностью охлаждаемой сверхзвуковой частью сопла, на которые установлены части дефлектора, выполненные из углерод-углеродного композиционного материала (УУКМ), наружные и внутренние поверхности которого, эквидистантные наружной поверхности секторов, закреплены к сферическим секторам с помощью фасонных кронштейнов, расположенных по бокам частей дефлектора и имеющих эквидистантные внутренние поверхности относительно наружных поверхностей дефлектора, имеющих зазор между собой для крепления кронштейна, расположенного на наружной поверхности частей дефлектора, при этом все эквидистантные поверхности сферических секторов, частей дефлектора и кронштейнов имеют графитовое покрытие.
Такое исполнение ЖРД позволяет реализовать следующие процессы:
- когда не требуется боковое управляющее усилие, сектора дефлектора находятся в исходном положении и не обтекаются газовым потоком;
- при необходимости получения бокового усилия в определенной плоскости подается команда на соответствующие рулевые агрегаты. Рулевым агрегатом сектор дефлектора погружается в газовый поток.
Боковое управляющее усилие будет реализовываться из двух составляющих: усилия от распределения давления на поверхности дефлектора и усилия от повышения давления в зоне сопла перед дефлектором.
При погружении дефлектора в газовую струю боковое усилие будет реализовываться не только за счет повышения давления на поверхности дефлектора, но также и за счет повышения давления в отрывной зоне на сопловой части перед сектором дефлектора. Причем повышение давления на сопловой части перед сектором дефлектора вносит существенную составляющую в получение бокового управляющего усилия и позволяет значительно уменьшить усилия на рулевом агрегате. За счет этого реализуется эффективное боковое усилие при уменьшенном усилии на рулевом агрегате и уменьшенных осевых потерях импульса тяги.
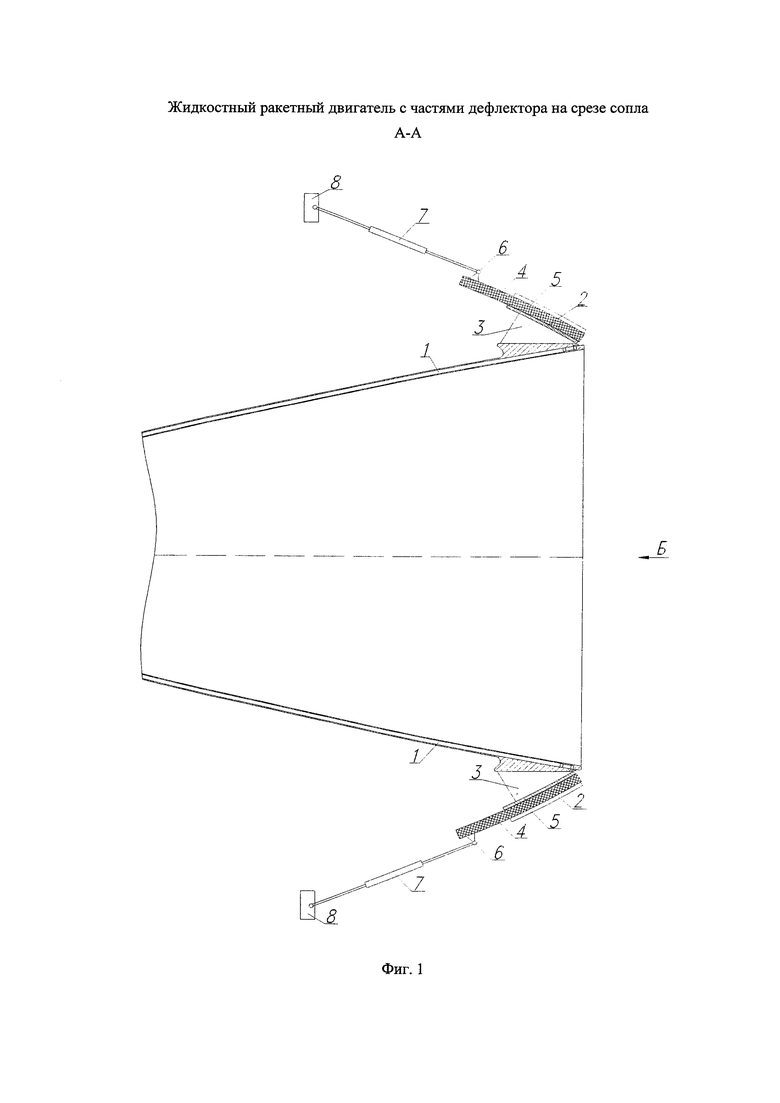
Сущность предлагаемого изобретения поясняется схемами, показанными на фиг. 1, 2, 3.
ЖРД (фиг. 1) содержит камеру 1 с охлаждаемой сверхзвуковой частью сопла, сферические сектора 2, боковые стенки 3, части дефлектора 4, кронштейны 5, проушины (кронштейны) 6, рулевые агрегаты 7, раму двигателя 8.
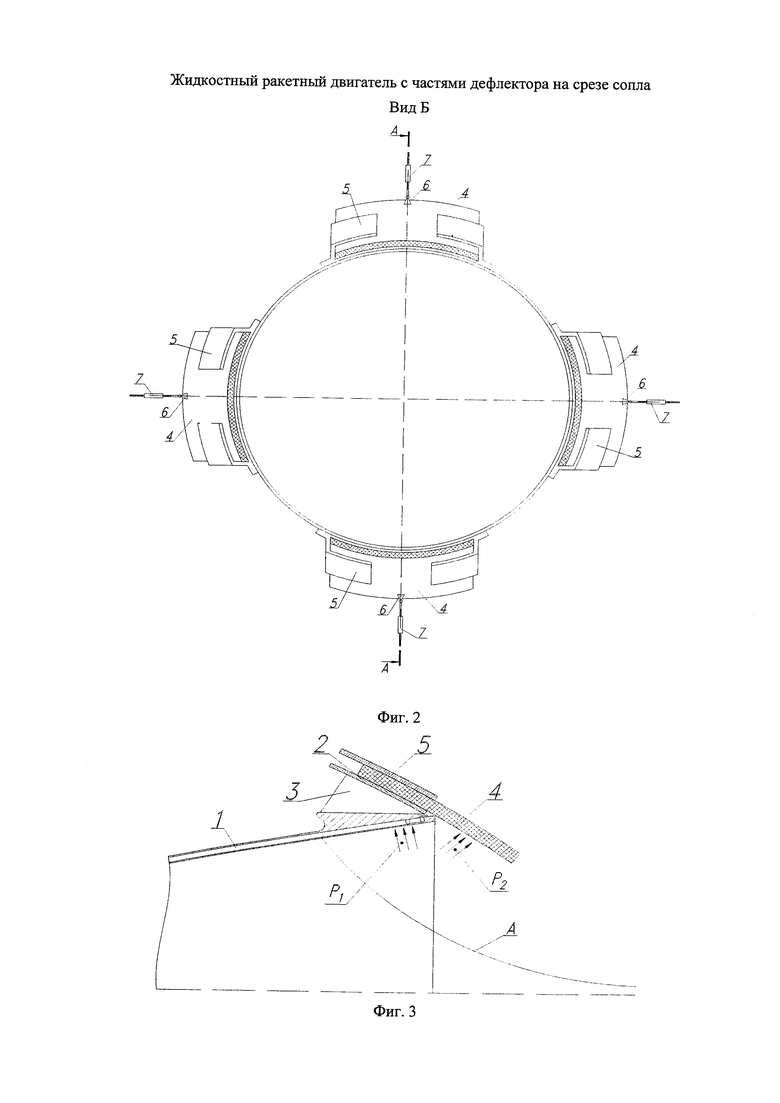
На фиг. 2 показано расположение четырех частей дефлектора 4, фасонных кронштейнов 5, проушин (кронштейнов) 6, рулевых агрегатов 7
На фиг. 3 показана физическая картина получения бокового усилия. При погружении сектора дефлектора 4 в газовую струю на охлаждаемую сверхзвуковую часть сопла камеры 1 действует повышенное давление P1 за скачком уплотнения А перед сектором дефлектора 4, при этом на сектор дефлектора 4 действует давление Р2.
ЖРД с органами управления вектором тяги (частями дефлектора) работает следующим образом.
По команде «Запуск» ЖРД начинает работать по штатной циклограмме. Происходит подача компонентов топлива в камеру 1 и на их воспламенение, образуя внутри камеры газовую струю. При необходимости поворота на определенный угол от системы управления РН подается сигнал на соответствующие рулевые агрегаты 7, которые через проушину 6 поворачивают часть дефлектора 4 вокруг оси, расположенной на оси камеры 1. В результате погружения части дефлектора 4 в газовую струю на поверхности сектора дефлектора и охлаждаемой сверхзвуковой части сопла, примыкающей к сектору дефлектора, повышается статическое давление, которое существенно выше давления на противоположной части охлаждаемого сопла, в результате создается боковое управляющее усилие.
Таким образом, использование частей дефлектора со сферической поверхностью, выполненных из УУКМ и расположенных в районе среза сопла, позволяет получить большое управляющее усилие, уменьшение потерь в осевой тяге при получении бокового усилия, уменьшение усилия на рулевые агрегаты и повышение надежности работы и ресурса работы конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С НАСАДКОМ ИЗ УГЛЕРОД-УГЛЕРОДНОГО КОМПОЗИЦИОННОГО МАТЕРИАЛА (УУКМ) | 2017 |
|
RU2657400C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДЕФЛЕКТОРОМ НА СРЕЗЕ СОПЛА | 2015 |
|
RU2579294C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДЕФЛЕКТОРОМ ВНУТРИ СОПЛА | 2018 |
|
RU2686367C1 |
| ЖРД С ПЕРИФЕРИЙНЫМИ РУЛЯМИ НА СРЕЗЕ СОПЛА | 2022 |
|
RU2783307C1 |
| КАМЕРА ВЫСОТНОГО ЖРД С ПЕРИФЕРИЙНЫМИ РУЛЯМИ НА СРЕЗЕ СОПЛА | 2024 |
|
RU2833285C1 |
| КАМЕРА ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ (ЖРД) С ГАЗОДИНАМИЧЕСКИМ СПОСОБОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ И СОПЛОВЫМ НАСАДКОМ ИЗ УГЛЕРОД-УГЛЕРОДНОГО КОМПОЗИЦИОННОГО МАТЕРИАЛА (УУКМ) | 2022 |
|
RU2786606C1 |
| КАМЕРА ЖРД С РЕГУЛИРУЕМЫМ СОПЛОМ | 2016 |
|
RU2640903C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2015 |
|
RU2594844C1 |
| УЗЕЛ КАЧАНИЯ КАМЕРЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ (ЖРД) | 2014 |
|
RU2536738C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2391549C1 |
Изобретение относится к ракетным двигателям, в которых для управления вектором тяги в полете используются различные органы управления, расположенные у среза сопла или внутри него. ЖРД содержит камеру с охлаждаемой сверхзвуковой частью сопла, рулевые агрегаты и раму, на наружной поверхности охлаждаемой сверхзвуковой части сопла в районе среза выполнено четыре сектора со сферической наружной поверхностью с центром, расположенным на оси камеры, и боковыми стенками, соединяющими сферические поверхности секторов, с наружной поверхностью охлаждаемой сверхзвуковой частью сопла, на которые установлены части дефлектора, выполненные из углерод-углеродного композиционного материала (УУКМ), наружные и внутренние поверхности которого, эквидистантные наружной поверхности секторов, закреплены к сферическим секторам с помощью фасонных кронштейнов, расположенных по бокам частей дефлектора и имеющих эквидистантные внутренние поверхности относительно наружных поверхностей дефлектора, имеющих зазор между собой для крепления кронштейна, расположенного на наружной поверхности частей дефлектора, при этом все эквидистантные поверхности сферических секторов, частей дефлектора и кронштейнов имеют графитовое покрытие. Изобретение обеспечивает повышение эффективности, ресурса работы и получения большей величины бокового управляющего усилия и уменьшения усилия на рулевых органах. 3 ил.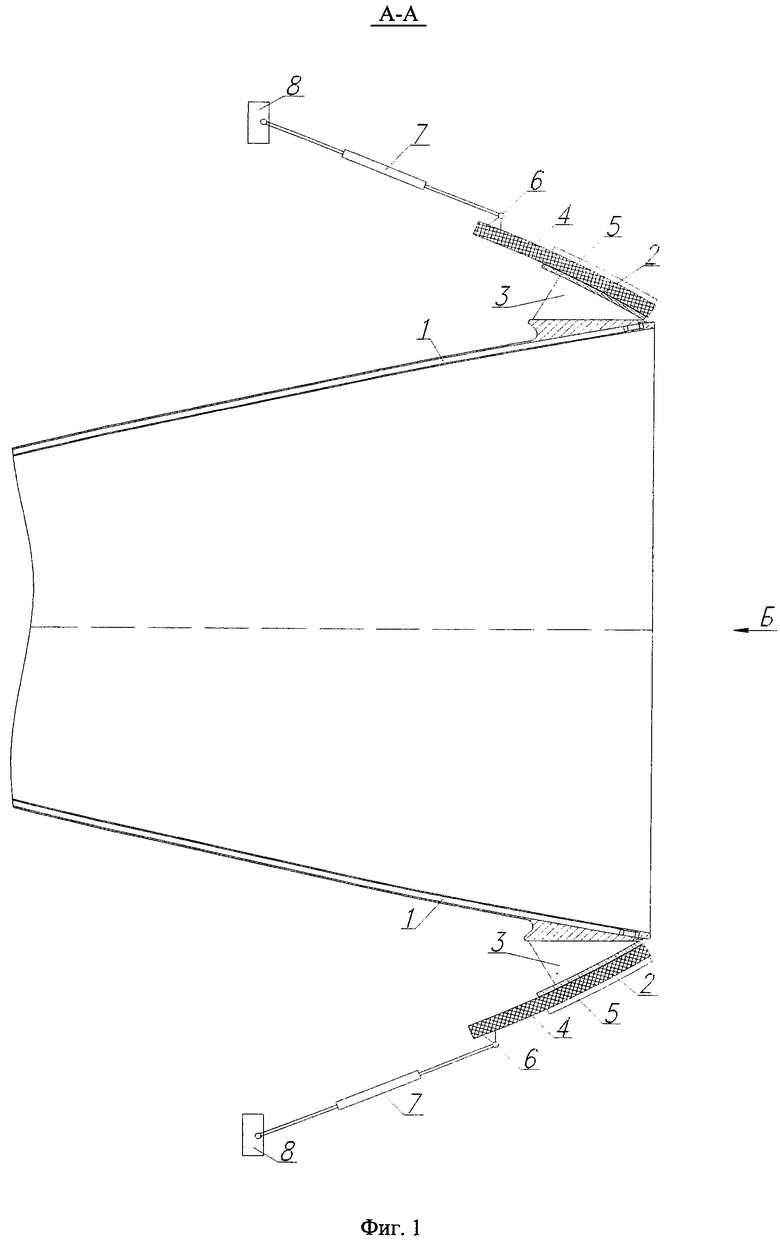
ЖРД, содержащий камеру с охлаждаемой сверхзвуковой частью сопла, рулевые агрегаты и раму, отличающийся тем, что на наружной поверхности охлаждаемой сверхзвуковой части сопла в районе среза выполнено четыре сектора со сферической наружной поверхностью с центром, расположенным на оси камеры, и боковыми стенками, соединяющими сферические поверхности секторов, с наружной поверхностью охлаждаемой сверхзвуковой частью сопла, на которые установлены части дефлектора, выполненные из углерод-углеродного композиционного материала, наружные и внутренние поверхности которого, эквидистантные наружной поверхности секторов, закреплены к сферическим секторам с помощью фасонных кронштейнов, расположенных по бокам частей дефлектора и имеющих эквидистантные внутренние поверхности относительно наружных поверхностей дефлектора, имеющих зазор между собой для крепления кронштейна, расположенного на наружной поверхности частей дефлектора, при этом все эквидистантные поверхности сферических секторов, частей дефлектора и кронштейнов имеют графитовое покрытие.
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДЕФЛЕКТОРОМ НА СРЕЗЕ СОПЛА | 2015 |
|
RU2579294C1 |
| ГАЗОВЫЙ РУЛЬ РАКЕТНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2251013C2 |
| US 5067316 A1, 26.11.1991 | |||
| УСТРОЙСТВО МАССОВОЙ ПАМЯТИ И СИСТЕМА ХРАНЕНИЯ ДАННЫХ | 2009 |
|
RU2509349C2 |

