Изобретение относится к ракетному двигателестроению и может быть использовано в системах управления вектором тяги в ракетных двигателях на жидком топливе с различными схемами организации рабочего процесса.
Система управления вектором тяги (СУВТ) жидкостных ракетных двигателей обеспечивает движение ракеты-носителя или космического аппарата по заданной траектории с заданной пространственной ориентацией относительно трех осей.
Для создания управляющих сил используют поворот основных или управляющих ракетных двигателей, камер, сопел, включение неподвижных рулевых сопел, а также газовые рули и вдув рабочего тела в закритическую часть сопла. Совместная работа органов управления обеспечивает угловое смещение ракеты-носителя (РН) или разгонного блока (РБ) относительно плоскостей тангажа, рысканья и крена. Поворотные или качающиеся агрегаты устанавливаются в карданном подвесе, обеспечивающем качание двигателя (камеры, сопла) относительно одной или двух поперечных осей с помощью специальных рулевых машин.
С целью исключения механического воздействия рулевой машины, измеряемого тонна-силами, на двигатель (камеру или сопло), масса которых для маршевых ЖРД достигает нескольких тонн, возможно использовать вдув рабочего тела в сверхзвуковую часть сопла ЖРД. При этом создаваемая боковая управляющая сила является результирующей реактивной силы, возникающей при взаимодействии основного сверхзвукового потока и потока рабочего тела, вдуваемого с внутренней боковой поверхности сопла.
Такое техническое решение реализовано в СУВТ для двигателей на твердом топливе. Известны системы управления вектором тяги с вдувом газа в сверхзвуковую часть сопла (патенты США №3426972, 11.02.1969, №3296799, 10.01.1967), содержащие клапаны вдува, трубопроводы для подачи газа, источники газа. При этом система управления вектором тяги обеспечивает дискретное управление по каналам тангажа и рыскания, а вдуваемый газ имеет очень высокую температуру, так как используются для вдува продукты сгорания твердого топлива. Условия работы СУВТ вызывают необходимость использования специальных высокотемпературных материалов и теплоизоляции, что приводит к значительному увеличению массы конструкции, а дискретный режим работы увеличивает массу системы управления и массу заряда твердого топлива, необходимого для работы СУВТ.
Наиболее близким аналогом к предлагаемому изобретению является система управления вектором тяги жидкостного ракетного двигателя, обеспечивающая управление по крену при вдуве газа в сверхзвуковую часть сопла (патент США №3229461, 18.01.1966), содержащая коллектор, сопла вдува, трубопроводы подачи газа, клапаны вдува, клапаны подачи газа и систему управления их работой. При этом вдув газа осуществляется через сопла, имеющие одну наклонную и одну прямую стенки, такая геометрия создает нецентральную тягу, которая в сочетании с косым срезом, возникающим в зоне пересечения сопла вдува с внутренней поверхностью сопла двигателя и поперечной струей, прижимающей поток к насадку, создает момент сил относительно оси сопла, то есть обеспечивает управление по крену. Клапаны подачи газа обеспечивают дискретный режим работы управляющих сопел.
Недостатком данного технического решения является невозможность управления по каналам тангажа и рыскания, а дискретный характер управления приводит к необходимости непрерывной работы СУВТ, что требует большого запаса вдуваемого газа при большой массе и сложности конструкции системы его хранения и подачи.
Задачей изобретения является устранение вышеуказанных недостатков и создание системы управления вектором тяги, обеспечивающей управление по тангажу, рысканию и крену за счет вдува газообразного компонента, отбираемого после турбины турбонасосного агрегата (ТНА).
Технический результат изобретения заключается в обеспечении возможности управления вектором тяги ЖРД по тангажу, рысканию и крену, используя одну систему управления.
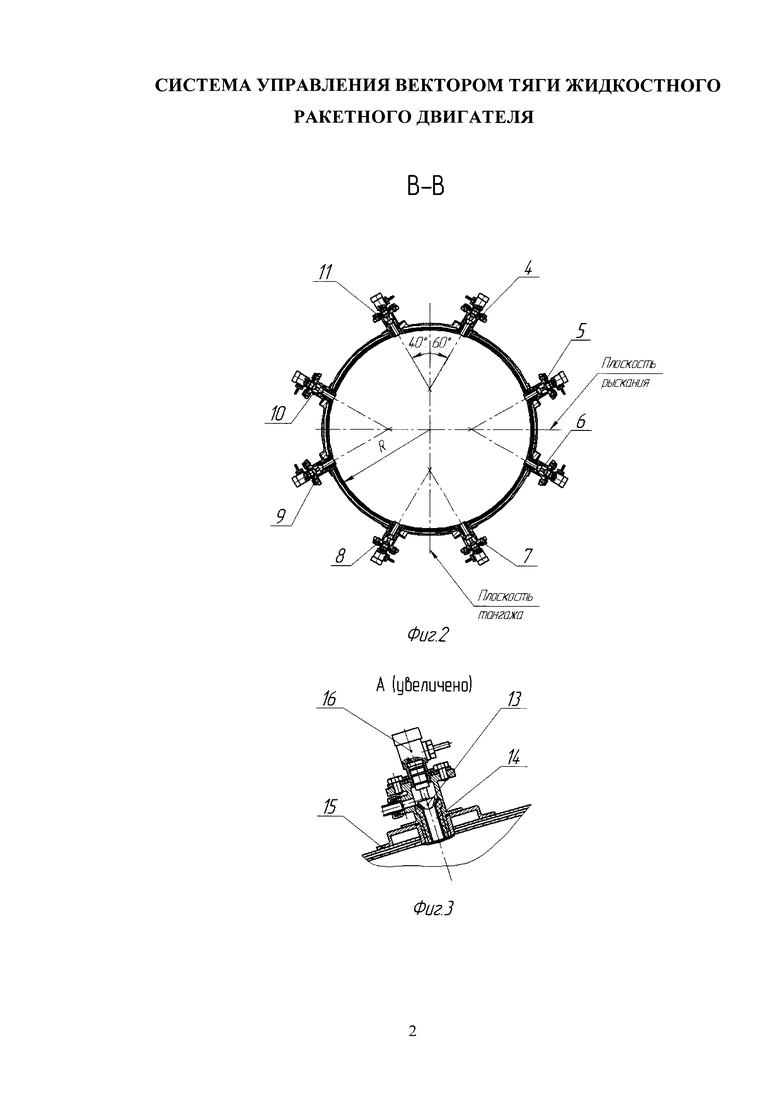
Для решения задачи и обеспечения технического результата предложена система управления вектором тяги жидкостного ракетного двигателя, состоящая из коллектора, трубопроводов и газодинамических органов управления. Система содержит 8 газодинамических органов управления, каждый из которых представляет собой клапан, через который подается газ в сопло. При этом клапаны располагаются парами равномерно на наружной поверхности сверхзвуковой части сопла в плоскости инжекции газа, перпендикулярной продольной оси сопла. Клапаны в двух парах симметричны плоскости тангажа, а в двух других парах - плоскости рыскания. Причем для исключения взаимного влияния возмущений при вдуве оси клапанов в каждой паре пересекаются под углом 40°÷60°, а точка их пересечения находится на расстоянии 1/3R…2/3R от центра окружности, образованной пересечением внутренней поверхности сопла с плоскостью инжекции газа, где R - радиус этой окружности.
Внутри каждого клапана может быть размещен регулирующий элемент с приводом и инжектор, между которыми формируется регулируемое критическое сечение, изменяющее расход вдуваемого в сопло газа.
На наружной поверхности сопла может быть установлен шпангоут, на котором располагаются пары клапанов, при этом длина канала инжектора каждого клапана обеспечивает безотрывность течения вдуваемого в сопло газа при любом положении регулирующего элемента.
Шпангоут смонтирован на наружной поверхности сверхзвуковой части сопла и зафиксирован герметичным сварным швом. В шпангоуте и в стенке сопла выполнены восемь сквозных отверстий, попарно расположенных в плоскостях тангажа и рыскания. Оси этих отверстий расположены перпендикулярно касательным к продольному контуру сопла, проведенным через их центры. Над отверстиями в шпангоуте установлены монтажные фланцы для размещения клапанов. Высота патрубков с монтажными фланцами определяется длиной инжектора клапана. Клапаны установлены на монтажные фланцы, а соединительные трубопроводы обеспечивают их газовую связь с коллектором. Внутри клапана посредством привода перемещается регулирующий элемент. Длина инжектора клапана выбирается из условия безотрывного сверхзвукового течения газа. В зазоре, формирующемся на входе в инжектор, между ним и регулирующим элементом реализуются критические параметры вдуваемого газа, т.е. формируется критическое сечение. Перемещение регулирующего элемента приводит к изменению площади критического сечения, т.е. расхода вдуваемого газа. Изменение расхода приводит к соответствующему изменению возникающей поперечной управляющей силы. Включение клапанов осуществляется в определенном порядке, обеспечивающем создание одновременно поперечных сил и крутящего момента (момента крена). Газ в коллектор поступает из системы выхлопа турбины ТНА, и затем из коллектора через трубопроводы и клапаны направляется в сопло двигателя.
Сущность изобретения поясняется чертежами.
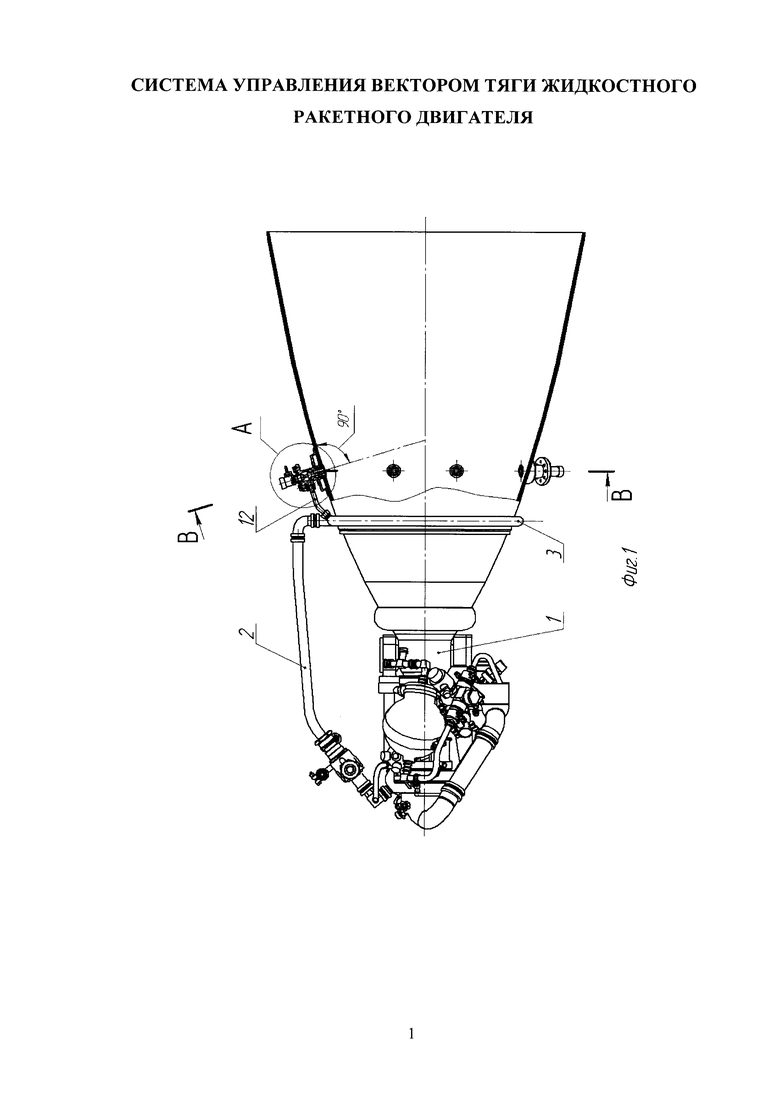
На фиг. 1 схематично показан жидкостной ракетный двигатель с системой управления вектором тяги согласно изобретению.
На фиг. 2 приведен разрез B-В.
На фиг. 3 приведена конструкция клапана.
Жидкостной ракетный двигатель 1 (фиг. 1-2) содержит трубопровод 2, соединяющий коллектор 3 системы управления вектором тяги с выхлопной системой турбины ТНА. Восемь газодинамических органов управления СУВТ состоят из клапанов 4-11, соединенных трубопроводами 12 с коллектором 3. Внутри каждого клапана (фиг. 3) расположен регулирующий элемент 13, соединенный с приводом 16, а инжектор 14 клапана монтируется на кольцевом шпангоуте 15, приваренном к внешней силовой оболочке расширяющейся сверхзвуковой части сопла.
Работа системы управления вектором тяги осуществляется от блока команд системы управления ракетой путем подачи электрических сигналов на привод 16 каждого из восьми клапанов 4-11. При перемещении регулирующих элементов 13 над инжектором 14 формируется кольцевая щель (зазор), через которую газ вдувается в основной поток газа в сопле. В кольцевой щели формируется критическое сечение и реализуются критические параметры во вдуваемом газе, а в инжекторе формируется сверхзвуковой поток вдуваемого газа. Изменение величины управляющей силы реализуется за счет изменения расхода вдуваемого газа, которое регламентируется величиной площади кольцевого зазора, формирующегося между регулирующим элементом 13 и верхней частью инжектора 14. Алгоритм работы СУВТ реализуется соответствующим порядком включения клапанов 4-11. Расположение клапанов СУВТ согласно предлагаемому изобретению позволяет одновременно создавать поперечные (управляющие) силы и момент крена.
Изобретение может быть использовано при создании ЖРД для перспективных ракет-носителей нового поколения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СОПЛО | 2022 |
|
RU2791932C1 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2726214C1 |
| УПРАВЛЯЕМЫЙ МНОГОКАМЕРНЫЙ РАКЕТНЫЙ АППАРАТ НА ЖИДКОМ ТОПЛИВЕ | 1999 |
|
RU2156874C1 |
| КАМЕРА ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ГАЗОДИНАМИЧЕСКИМ СПОСОБОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 2021 |
|
RU2771254C1 |
| СИСТЕМА ВЫДАЧИ ИМПУЛЬСОВ ТЯГ | 2014 |
|
RU2560645C1 |
| Устройство обеспечения посадки возвращаемой многоразовой ступени ракеты-носителя | 2024 |
|
RU2841245C1 |
| ВОЗВРАЩАЕМАЯ СТУПЕНЬ РАКЕТЫ-НОСИТЕЛЯ | 2015 |
|
RU2603305C1 |
| МАНЕВРИРУЮЩАЯ СТУПЕНЬ РАКЕТЫ С КОМБИНИРОВАННОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СПОСОБ УПРАВЛЕНИЯ ЕЕ ДВИЖЕНИЕМ | 2010 |
|
RU2427507C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С РЕГУЛИРУЕМЫМ СОПЛОМ И БЛОК СОПЕЛ КРЕНА | 2010 |
|
RU2441170C1 |
| ЗВЕЗДОЛЕТ С ЯДЕРНОЙ СИЛОВОЙ УСТАНОВКОЙ И АТОМНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2011 |
|
RU2459102C1 |
Изобретение относится к ракетному двигателестроению и может быть использовано в системах управления вектором тяги в ракетных двигателях на жидком топливе с различными схемами организации рабочего процесса. Система управления вектором тяги жидкостного ракетного двигателя, состоящая из коллектора, трубопроводов и газодинамических органов управления, содержит восемь газодинамических органов управления, каждый из которых представляет собой клапан, через который подается газ в сопло. При этом клапаны располагаются парами равномерно на наружной поверхности сверхзвуковой части сопла в плоскости инжекции газа, перпендикулярной продольной оси сопла. Клапаны в двух парах симметричны плоскости тангажа, а в двух других парах - плоскости рыскания. При этом в каждой паре оси клапанов пересекаются под углом 40°÷60°, а точка их пересечения находится на расстоянии 1/3R…2/3R от центра окружности, образованной пересечением внутренней поверхности сопла с плоскостью инжекции газа, где R - радиус этой окружности. Изобретение обеспечивает управление вектором тяги ЖРД по тангажу, рысканию и крену, используя одну систему управления. 2 з.п. ф-лы, 3 ил.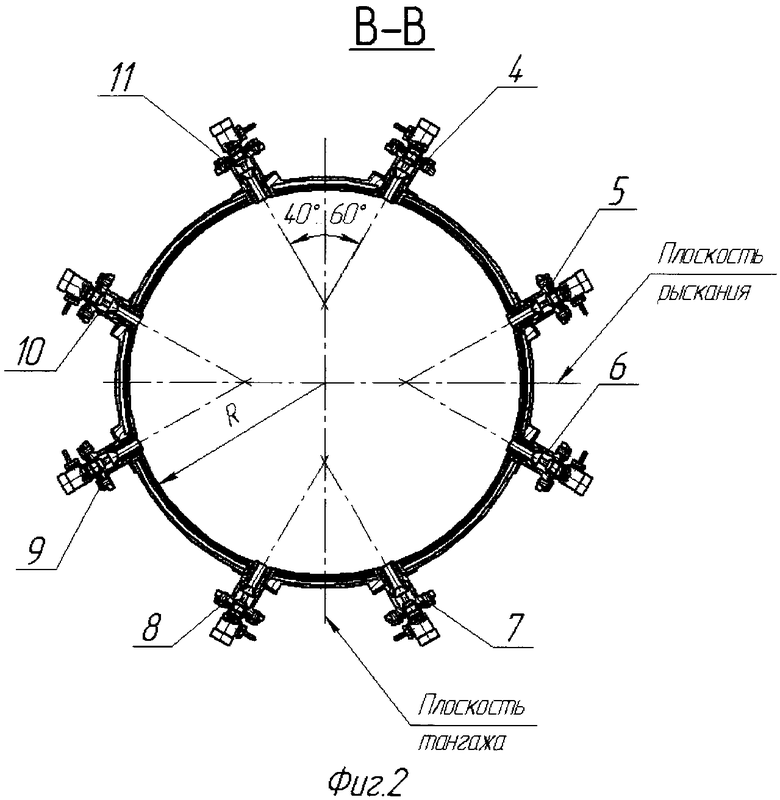
1. Система управления вектором тяги жидкостного ракетного двигателя, состоящая из коллектора, трубопроводов и газодинамических органов управления, отличающаяся тем, что содержит 8 газодинамических органов управления, каждый из которых представляет собой клапан, через который подается газ в сопло, при этом клапаны располагаются парами равномерно на наружной поверхности сверхзвуковой части сопла в плоскости инжекции газа, перпендикулярной продольной оси сопла, клапаны в двух парах симметричны плоскости тангажа, а в двух других парах - плоскости рыскания, причем в каждой паре оси клапанов пересекаются под углом 40°÷60°, а точка их пересечения находится на расстоянии 1/3R…2/3R от центра окружности, образованной пересечением внутренней поверхности сопла с плоскостью инжекции газа, где R - радиус этой окружности.
2. Система управления вектором тяги жидкостного ракетного двигателя по п. 1, отличающаяся тем, что внутри каждого клапана размещен регулирующий элемент с приводом и инжектор, между которыми формируется регулируемое критическое сечение, изменяющее расход вдуваемого в сопло газа.
3. Система управления вектором тяги жидкостного ракетного двигателя по п. 2, отличающаяся тем, что на наружной поверхности сопла установлен шпангоут, на котором располагаются пары клапанов, при этом длина канала инжектора каждого клапана обеспечивает безотрывность течения вдуваемого в сопло газа при любом положении регулирующего элемента.
| US 3229461 A, 18.01.1966 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ МЕТОДОМ ВДУВА РАБОЧЕГО ТЕЛА В СВЕРХЗВУКОВУЮ ЧАСТЬ СОПЛА | 1992 |
|
RU2046202C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ И СВЕРХЗВУКОВОЕ СОПЛО | 2009 |
|
RU2412368C1 |
| ДВИГАТЕЛЬНАЯ УСТАНОВКА | 2000 |
|
RU2190115C2 |
| Машина для литья под давлением | 1978 |
|
SU749560A1 |
| US 6298658 B1, 09.10.2001. | |||

