Изобретение относится к ракетным двигателям, в которых для управления вектором тяги в полете используются различные органы управления, расположенные у среза сопла или внутри него.
Известно, что на заре развития жидкостных ракетных двигателей (ЖРД) в немецкой ракете ФАУ-2 для управления вектором тяги использовались газовые рули, выполненные из графита и расположенные на срезе сопла. При повороте этих рулей вокруг оси с увеличением площади натекания создается боковое усилие. Развитие ракетной техники потребовало создание более надежных и эффективных органов управления вектором тяги.
Известны газовые рули по патенту США №3251555 и по патенту России №2251013 F02K 9/80, 2003.
В патенте России газовый руль содержит перо, тарель с цилиндрическим выступом, вал, хвостовик которого с помощью кольцевой выточки через разжимное кольцо насажен на выступ тарели.
Кроме того, газовые рули нашли широкое распространение в зенитных управляемых ракетах (ЗУР).
Недостатком данных конструкций является:
- низкая надежность органов управления, так как они все время находятся в высокотемпературном газовом потоке, что приводит к их эрозии и быстрому выгоранию;
- нахождение газовых рулей все время в потоке сопровождается наличием их лобового сопротивления, что снижает удельные энергетические характеристики.
Известна конструкция ЖРД, содержащего камеру с охлаждаемой сверхзвуковой частью сопла с расположенными в районе среза четырех неохлаждаемых секторов из УУКМ со сферической наружной поверхностью с центром, расположенным на оси камеры (патент России №2631370) - принятая за прототип.
Недостатком данной конструкции является:
- низкая надежность неохлаждаемых секторов при работе их в течение длительного времени работы в высокотемпературном газовом потоке порядка 800÷900 с;
- невозможность их применения в ЖРД многоразового использования (до 4÷5 раз испытаний при технологических испытаниях на стенде, периодических испытаниях и использовании до 2-3 запусков при летных испытаниях).
Предлагаемое изобретение устраняет указанные недостатки прототипа и решает техническую задачу повышения эффективности, увеличения ресурса работы и обеспечения многоразового использования.
Поставленная техническая задача решается тем, что ЖРД с периферийными рулями на срезе сопла, содержащий камеру со сверхзвуковой частью сопла, периферийные рули, установленные в разъемных цапфах на срезе сопла, подводные и отводные магистрали охладителя к периферийным рулям, силовую раму и рулевые агрегаты, согласно изложению, периферийные рули переменной толщины с каналами охлаждения внутренней и наружной поверхности, соединены с двухполостной осью вращения для подачи и отбора охладителя, соединенной с подводными и отводными магистралями, а на наружной поверхности выполнен кронштейн, соединенный с рулевыми агрегатами, закрепленными другим концом к силовой раме.
Такое исполнение ЖРД позволяет реализовать следующие процессы:
- когда не требуется боковое усилие, периферийные рули находятся в исходном положении, являясь продолжением контура сверхзвуковой части сопла, и создают дополнительное осевое усилие;
- при необходимости получения бокового усилия в определенной плоскости подается команда на соответствующие рулевые агрегаты. Рулевым агрегатом периферийный руль 1 погружается в газовый поток, а рулевой агрегат противоположного периферийного руля выводит руль из обтекания газовым потоком.
При погружении руля в газовую полость боковое усилие будет реализовываться не только за счет повышения давления на поверхности руля, но также за счет повышения давления в отрывной зоне на сопловой части перед периферийным рулем и вывода противоположного периферийного руля из контакта с газовой струей.
Причем повышение давления на сопловой части сопла перед периферийным рулем вносит существенную составляющую в получение бокового управляющего усилия и позволяет значительно уменьшить усилие на рулевом агрегате и уменьшение осевых потерь импульса тяги.
Сущность предполагаемого изобретения поясняется схемами, показанными на фиг. 1, 2, 3, 4, 5, 6.
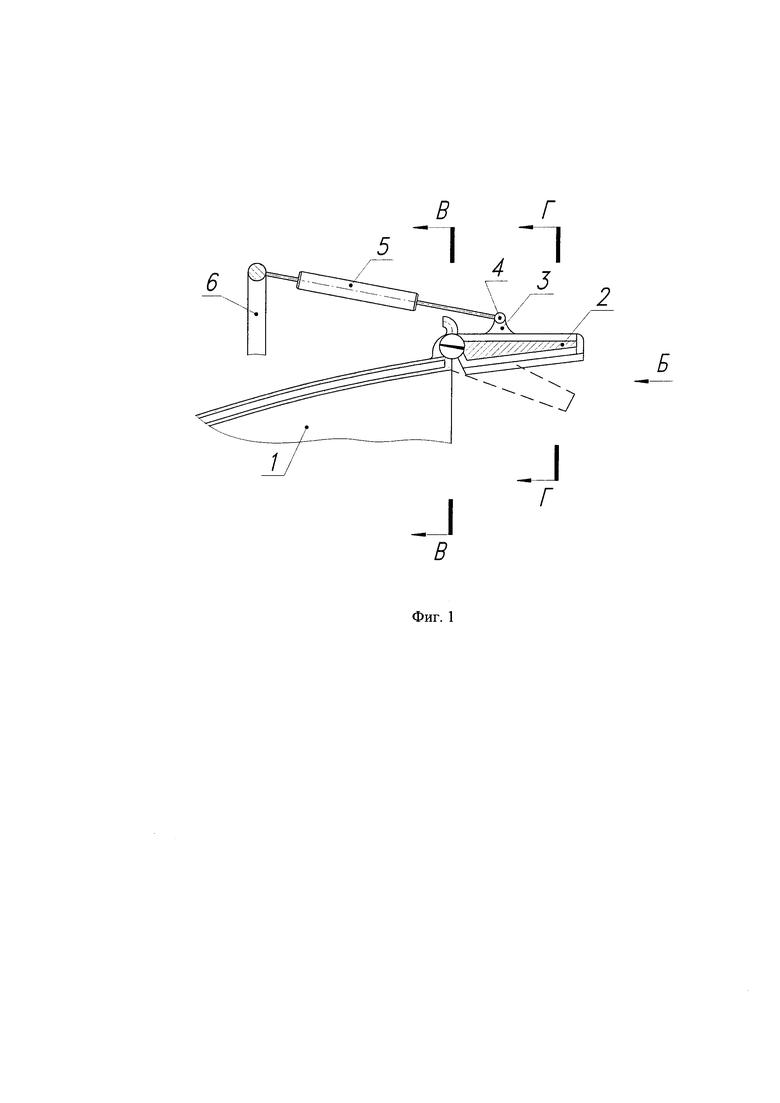
ЖРД (фиг. 1) содержит камеру 1, периферийные рули 2, кронштейны 3 с проушинами 4, рулевые агрегаты 5 и раму двигателя 6.
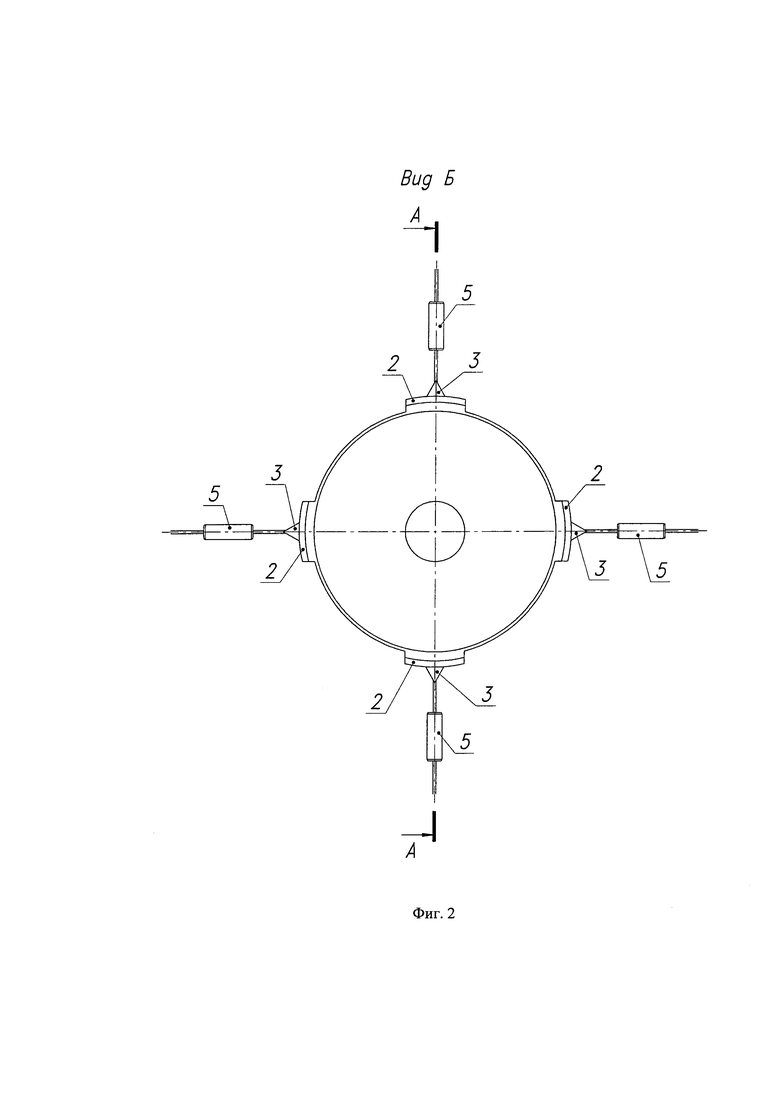
На фиг. 2 показано расположение четырех периферийных рулей 2, кронштейнов 3, рулевых агрегатов 5.
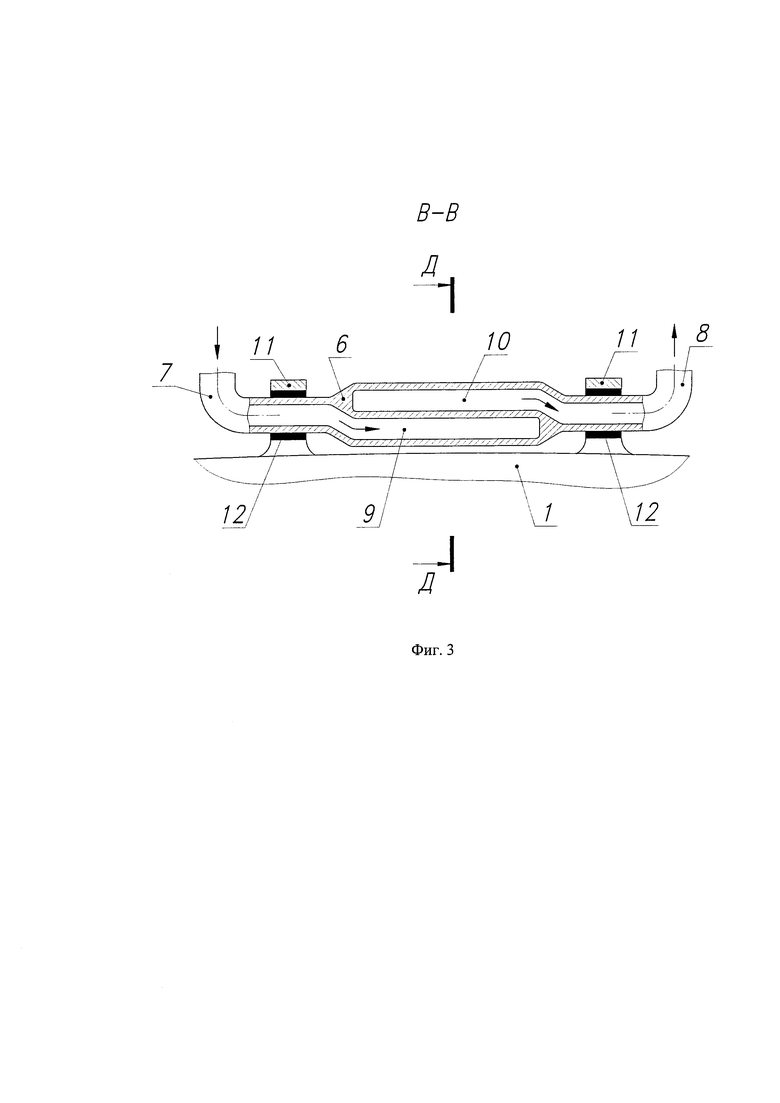
На фиг. 3 показан продольный разрез двухполостной оси вращения 6 периферийных рулей 2 с подводной магистралью 7 и отводной магистралью 8,
9 - полость подачи охладителя на внутреннюю стенку периферийного руля 2;
10 - полость сбора охладителя в оси вращения 6 после охлаждения наружной стенки периферийного руля;
11 - цапфы с графитовыми втулками 12.
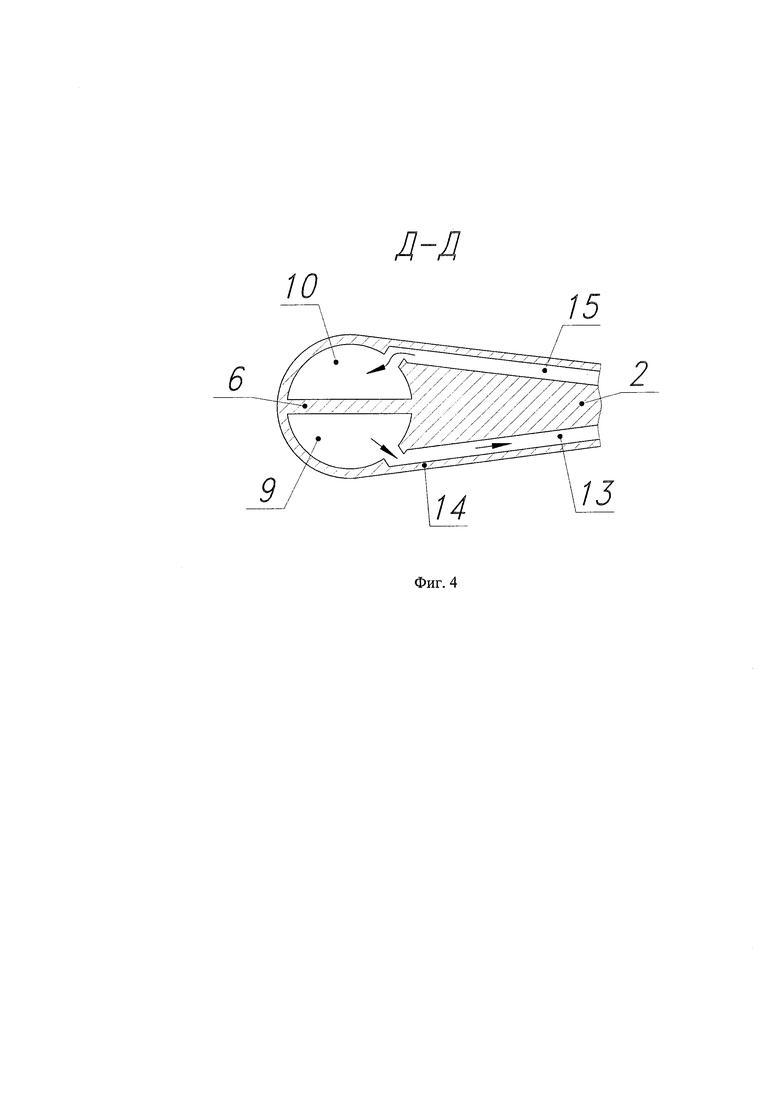
На фиг. 4 показан продольный разрез периферийного руля 2 с поступлением охладителя из входной полости 9 оси вращения 6 в каналы охлаждения 13 внутренней стенки руля 14,
15 - каналы охлаждения наружной стенки периферийного руля 2, соединенные с полостью сбора охладителя 10 оси вращения 6.
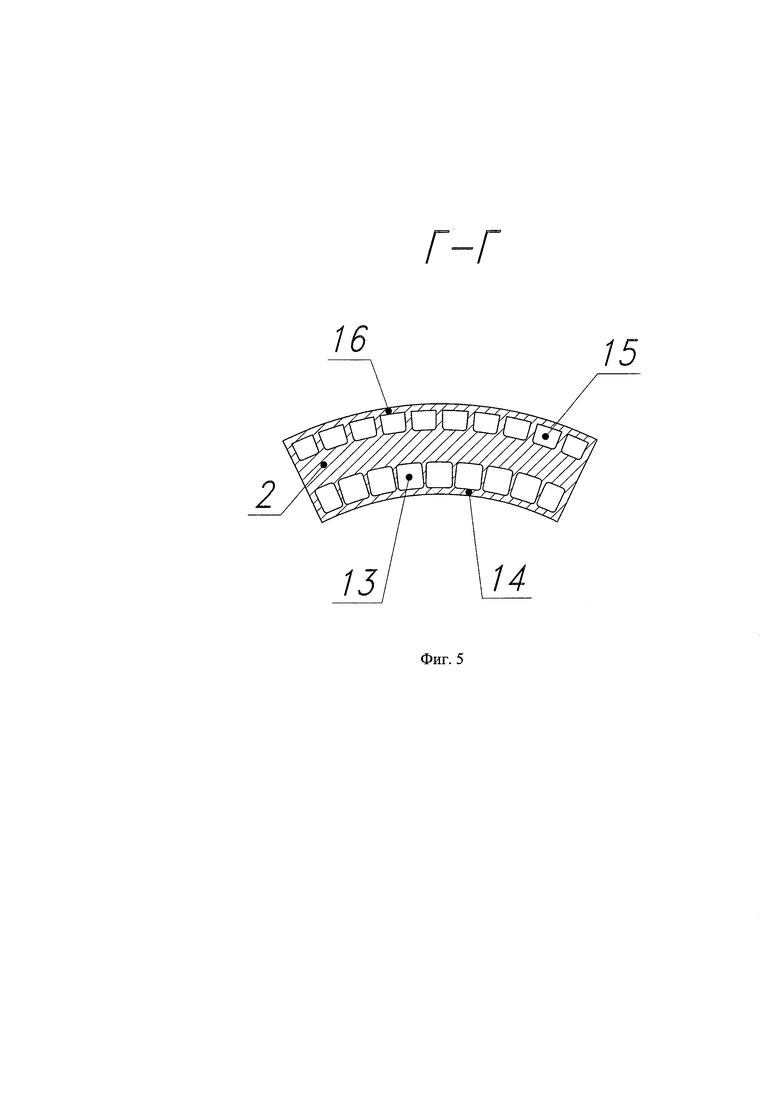
На фиг. 5 показан поперечный разрез периферийного руля 2 с каналами охлаждения 13 внутренней стенки 14 и каналами охлаждения 15 наружной стенки 16.
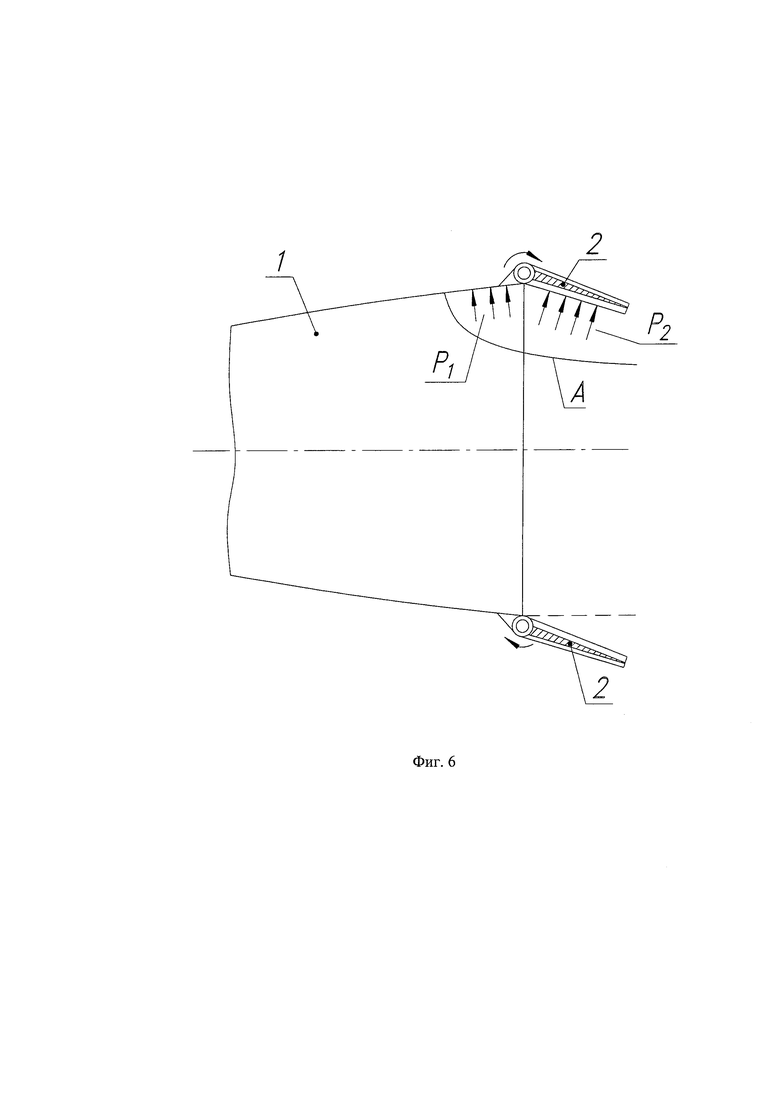
На фиг. 6 показана физическая картина получения бокового усилия с помощью работы двух периферийных рулей.
При погружении периферийного руля в газовую струю на поверхность сопла камеры 1 действует повышенное давление P1 за скачком уплотнения А перед периферийным рулем 2, при этом на периферийный руль действует давление Р2. Противоположный периферийный руль выходит из потока с газовой струей.
ЖРД с периферийными рулями на срезе сопла работает следующим образом.
По команде «Запуск» ЖРД начинает работать по штатной циклограмме. Происходит подача компонентов топлива в камеру 1 и их воспламенение, образуя внутри камеры газовую струю. Одновременно с подачей топлива в камеру подается команда на поступление охладителя в периферийные рули 2. Охладитель из подводной магистрали 7 через полость подачи охладителя 9 в оси вращения 6 поступает в каналы охлаждения 13 внутренней стенки 14, а затем в каналы 15, охлаждая наружную стенку 16 руля 2, потом в полость сбора охладителя 10 оси вращения 6 и в отводную магистраль 8.
При необходимости поворота руля на определенный угол от системы управления РН подается сигнал на соответствующие рулевые агрегаты 5, которые через проушину 4 поворачивают периферийный руль. В результате погружения периферийного руля 2 в газовую струю на поверхности руля и сверхзвуковой части сопла, примыкающей к периферийному рулю, повышается статическое давление, которое существенно выше давления на противоположной части сопла, в результате создается боковое управляющее усилие, которое увеличивается при выводе противоположного руля из контакта с газовой струей.
Таким образом, использование охлаждаемых периферийных рулей на срезе сопла позволяет получить большое управляющее усилие с уменьшением потерь в осевой тяге, уменьшение усилия на рулевые агрегаты, повышение надежности и ресурса работы, в том числе обеспечить многоразовость использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДЕФЛЕКТОРОМ ВНУТРИ СОПЛА | 2018 |
|
RU2686367C1 |
| КАМЕРА ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ (ЖРД), РАБОТАЮЩАЯ ПРИ ВЫСОКИХ ДАВЛЕНИЯХ | 2022 |
|
RU2786604C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С СЕКТОРАМИ ДЕФЛЕКТОРА НА СРЕЗЕ СОПЛА | 2016 |
|
RU2631370C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДЕФЛЕКТОРОМ НА СРЕЗЕ СОПЛА | 2015 |
|
RU2579294C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С НАСАДКОМ ИЗ УГЛЕРОД-УГЛЕРОДНОГО КОМПОЗИЦИОННОГО МАТЕРИАЛА (УУКМ) | 2017 |
|
RU2657400C1 |
| КАМЕРА ЖРД | 2017 |
|
RU2681733C1 |
| КАМЕРА ВЫСОТНОГО ЖРД С ПЕРИФЕРИЙНЫМИ РУЛЯМИ НА СРЕЗЕ СОПЛА | 2024 |
|
RU2833285C1 |
| КАМЕРА СГОРАНИЯ ДВУХРЕЖИМНОГО ЖРД, РАБОТАЮЩЕГО ПО БЕЗГЕНЕРАТОРНОЙ СХЕМЕ | 2018 |
|
RU2682466C1 |
| КАМЕРА ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ (ЖРД) С ГАЗОДИНАМИЧЕСКИМ СПОСОБОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ И СОПЛОВЫМ НАСАДКОМ ИЗ УГЛЕРОД-УГЛЕРОДНОГО КОМПОЗИЦИОННОГО МАТЕРИАЛА (УУКМ) | 2022 |
|
RU2786606C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2015 |
|
RU2594844C1 |
Изобретение относится к жидкостным ракетным двигателям (ЖРД), в которых для управления вектором тяги в полете используются различные органы управления, расположенные у среза сопла или внутри него. ЖРД с периферийными рулями на срезе сопла, содержащий камеру со сверхзвуковой частью сопла, периферийные рули, установленные в разъемных цапфах на срезе сопла, подводные и отводные магистрали охладителя к периферийным рулям, силовую раму и рулевые агрегаты, согласно изложению, периферийные рули переменной толщины с каналами охлаждения внутренней и наружной поверхностей соединены с двухполостной осью вращения для подачи и отбора охладителя, соединенной с подводными и отводными магистралями, а на наружной поверхности выполнен кронштейн, соединенный с рулевыми агрегатами, закрепленными другим концом к силовой раме. Изобретение обеспечивает повышение эффективности ЖРД, увеличение ресурса работы и многоразовое использование. 6 ил.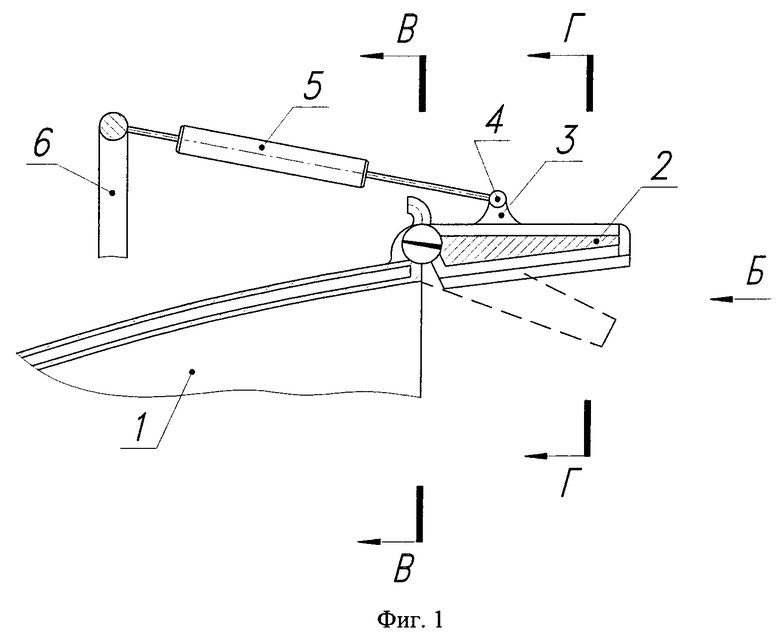
Жидкостной ракетный двигатель (ЖРД) с периферийными рулями на срезе сопла, содержащий камеру со сверхзвуковой частью сопла, периферийные рули, установленные в разъемных цапфах на срезе сопла, подводные и отводные магистрали охладителя к периферийным рулям, силовую раму и рулевые агрегаты, отличающийся тем, что периферийные рули переменной толщины с каналами охлаждения внутренней и наружной поверхностей соединены с двухполостной осью вращения для подачи и отбора охладителя, а на наружной поверхности выполнены кронштейны, соединенные с рулевыми агрегатами, закрепленными другим концом к силовой раме.
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С СЕКТОРАМИ ДЕФЛЕКТОРА НА СРЕЗЕ СОПЛА | 2016 |
|
RU2631370C1 |
| ГАЗОВЫЙ РУЛЬ РАКЕТНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2251013C2 |
| US 5511745 A1, 30.04.1996 | |||
| US 2009288389 A1, 26.11.2009 | |||
| DE 102007007568 A1, 21.08.2008. | |||

