Область техники, к которой относится изобретение
Изобретение относится к распознаванию существа или другого объекта. Например, распознавание может использоваться для управления одним или более устройствами освещения в зависимости от обнаруженного пребывания внутри комнаты, коридора или другого внутреннего или наружного пространства или для других применений распознавания.
Уровень техники
В текущих применениях освещения эффективность использования энергии является все более и более важным вопросом.
Одним из возможных методов уменьшения энергопотребления системы освещения является выключение или приглушение света, когда ни один человек не присутствует, и наоборот, включение света, когда кто-нибудь присутствует. Для того чтобы это сделать, должно быть обнаружено присутствие сколько-нибудь людей в соответствующем пространстве (например, для обнаружения присутствует ли кто-нибудь в определенной комнате или участке комнаты). Присутствие человека в пространстве может быть описано как пребывание. Различные типы датчиков пребывания и датчиков присутствия используются в настоящее время. Большинство из этих датчиков представляют собой датчики движения и используют пассивный инфракрасный датчик (PIR) для обнаружения движения.
Другой метод обнаружения присутствия человека является использование активной технологии распознания, посредством которой одна или более волн излучаются в рассматриваемое пространство и обнаруживается присутствие на основе принятых обратно эхо-сигналов. Одна технология, подходящая для использования в активном распознавании, представляет собой ультразвуковую (США). Активный ультразвуковой детектор присутствия посылает сигнал в виде серии импульсов акустических волн (или незатухающую волну) с ультразвуковой частотой, например, 40 кГц. Датчик тогда использует эхо-сигналы, которые он получает обратно от окружающей среды для того, чтобы определить, выявлено ли присутствие в этой окружающей среде, например в комнате. Для этого могут быть использованы различные способы, например доплеровские измерения, измерения времени пролета и/или обработка индикатора движущихся целей (MTI).
При выполнении активных измерений в окружающей среде измерение может негативно повлиять на другие источники сигнала в том же пространстве, которое излучает сигнал с аналогичными характеристиками как у датчика присутствия. Например, было показано, что когда брелок или набор ключей гремят, они излучают звук, включающий в себя компонент в ультразвуковом спектре, и он может привести к ошибочному результату при выполнении измерения в тот же момент. В качестве другого примера рассматриваемый датчик может испытывать помехи от другого ближайшего ультразвукового датчика, передающего в тот же или даже другой момент времени, в зависимости от таких факторов, как уровень выходного звукового давления, время между импульсами от двух датчиков и расстояния между двумя датчиками.
Такие ошибочные результаты могут привести к включению света, когда ни один человек не присутствует. В качестве альтернативы, если чувствительность датчика уменьшена, чтобы попытаться избежать этого, то небольшие, но подлинные движения человека могут быть пропущены. Помехи или другие искажения могут также быть проблемой в других применениях распознавания.
Сущность изобретения
Трудность при обнаружении помех или другого искажения представляет собой различие между полезным сигналом и искажением. Например, активный датчик не может обычно обнаруживать помехи в собственном периоде измерения (временном интервале, в течение которого он прослушивает эхо-сигнал собственного сигнала), поскольку он не может различить свой собственный сигнал и сигнал помехи.
Настоящее изобретение, с другой стороны, применяется к частотной области для поиска искажения за пределами полосы полезного сигнала. Это может быть сделано в течение периода измерения полезного сигнала в областях спектра с одной из сторон ожидаемой полосы полезных сигналов. Если искажение здесь обнаружено, то можно сделать вывод, что искажение может также распространяться на этой полосе. Альтернативно или дополнительно, обнаружение может быть выполнено за пределами периода измерения полезных сигналов во всем широком диапазоне частот, включающем в себя, но распространяющемся за пределы того полезного сигнала. Это может иметь отношение к нахождению искажения, которое может распространяться в периоде измерения датчика.
Следовательно, согласно одному описанному здесь аспекту, обеспечивается блок обработки сигналов для использования с приемником для приема эхо-сигналов излучаемого сигнала. Блок обработки сигналов содержит логическую схему распознавания для распознавания присутствия существа или объекта в пространстве, используя эхо-сигналы упомянутого сигнала, отраженные от существа или объекта, при этом эхо-сигналы принимаются c соответствующей полосой частот в спектре. Блок обработки сигналов дополнительно содержит логическую схему управления для обнаружения искажения, которое может негативно повлиять на упомянутое распознавание. Логическая схема управления сконфигурирована с возможностью обнаружения упомянутого искажения посредством прослушивания паразитного сигнала в области спектра за пределами полосы частот эхо-сигналов и адаптирования распознавания в зависимости от обнаруженного искажения.
В вариантах воплощения для уменьшения ошибочных результатов логическая схема управления может быть сконфигурирована с возможностью определения, имеется ли помеха как (i) для полного (релевантного) спектра до периода измерения, так и (ii) за пределами ожидаемого спектра эхо-сигнала от активного импульса в течение периода измерения.
Амплитуда обнаруженного сигнала может тогда использововаться для определения, какое количество порогового значения обнаружения сигнала должно быть изменено (увеличено), чтобы уменьшить чувствительность распознавания и, таким образом, уменьшить ошибочные результаты, еще будучи в состоянии определения присутствия.
Когда для множества последовательных измерений определено, что присутствуют помехи, это может быть признаком того, что другое ультразвуковое устройство обнаружения присутсвия также выполняет измерения. В этом случае логическая схема управления может решиться на определение нового временного интервала для выполнения своих измерений таким образом, что они могут быть выполнены без дальнейшей помехи. В этом случае, если пороговое значение обнаружения было ранее увеличено из-за помехи, оно может быть уменьшено снова для того, чтобы это увеличение было только временным и чувствительность могла быть восстановлена.
В примерном применении обеспечивается система освещения, содержащая: блок обработки сигналов, приемник, выполненный с возможностью приема эхо-сигнала излучаемого сигнала, передатчик, выполненный с возможностью излучения упомянутого сигнала, и одно или более устройство освещения. В этом случае логическая схема управления сконфигурирована с возможностью управления одним или более устройством освещения в зависимости от распознавания.
Согласно еще одному аспекту, может быть обеспечен компьютерный программный продукт для выполнения распознавания на основе эхо-сигналов излучаемого сигнала. Компьютерный программный продукт содержит код, реализованный на машиночитаемом носителе и сконфигурированый так, чтобы при его исполнении на процессоре выполнялисть операции в соответствии с любым представленным здесь раскрытием свойств датчика.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения и чтобы показать, как могут быть осуществлены варианты воплощения, осуществляется ссылка на прилагаемые чертежи, на которых:
Фиг. 1 представляет собой схематическую иллюстрацию области распознавания внутри пространства,
Фиг. 2 схематически иллюстрирует серию временных интервалов,
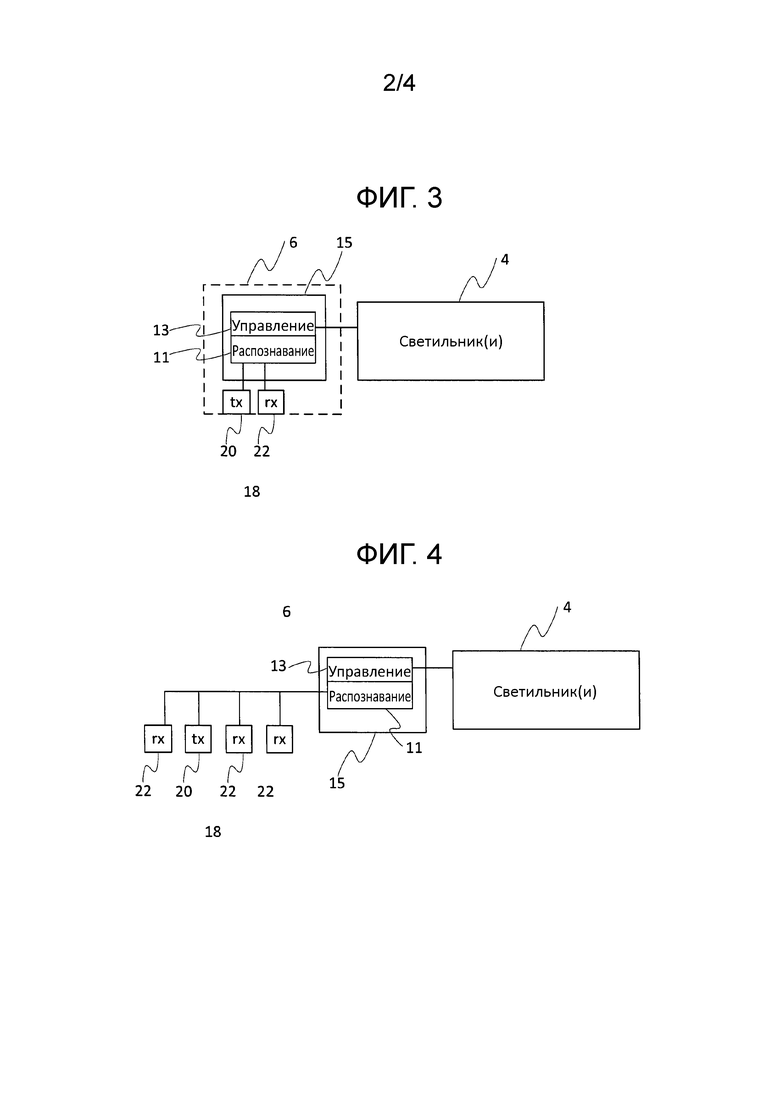
Фиг. 3 представляет собой схематическую структурную схему устройства освещения с датчиком,
Фиг. 4 представляет собой схематическую структурную схему устройства освещения с распределенной системой датчиков,
Фиг. 5 схематически иллюстрирует времена и частоты для обнаружения искажений,
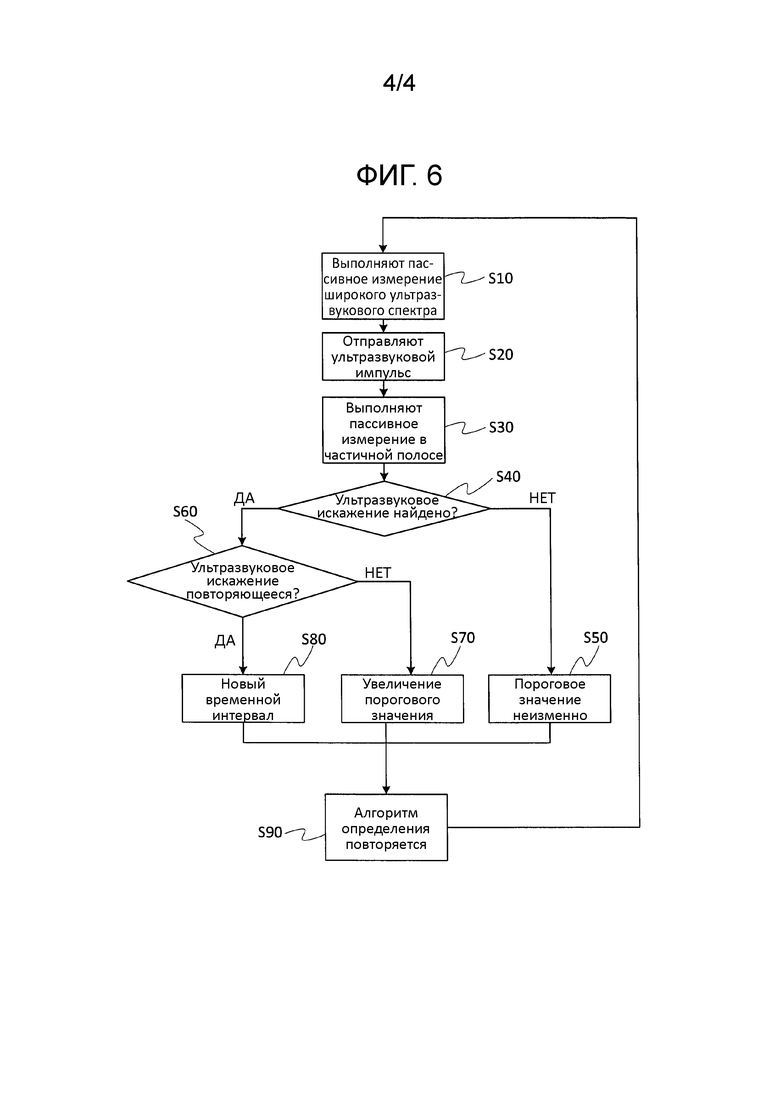
Фиг. 6 представляет собой схематическую блок-схему способа распознавания.
Осуществление изобретения
Фиг. 1 иллюстрирует пример окружающей среды, в которой могут использоваться раскрытые здесь варианты воплощения.
Окружающая среда содержит закрытое или открытое пространство 2, такое как офисное пространство, внутреннее пространство в доме, лабораторию, шатер, сад или парк и т.д. Пространство 2 содержит датчик 6 установленный или иным образом размещенный на местоположении, давая возможность ему распознавать существо в пространстве 2 или желаемой области 12 внутри пространства. В иллюстративном примере датчик 6 установлен на потолке 8 офиса 2 так, чтобы распознавать присутствие кого-то идущего по полу 10. В этом случае область 12 распознавания может соответствовать определенной области 14 на полу 10.
Как схематично показано на Фиг.3, датчик 6 содержит блок 15 обработки сигналов и ультразвуковой приемопередатчик 18, содержащий ультразвуковой передатчик 20 и ультразвуковой приемник 22, соединенные с блоком 15 обработки сигналов. Блок 15 обработки сигналов может быть реализован в коде (программном обеспечении), который хранится в памяти, содержащей один или более носителей информации, и выполненный с возможностью исполнения на процессоре, содержащемся в одном или более блоков обработки. Код сконфигурирован так, чтобы при вызове из памяти и исполнении на процессоре выполнялись операции в соответствии с вариантами воплощения, рассмотренные ниже. Альтернативно не исключается, что некоторые части или весь блок 15 обработки сигналов реализованы в специализированных схемах аппаратных средств или конфигурируемых схемах аппаратных средств, как FPGA.
В примерном применении раскрытых здесь технологий пространство 2 содержит одно или более устройств 4 освещения в виде одного или более светильников, выполненных с возможностью излучения света. Блок 15 обработки сигналов датчика 6 соединен со светильником(ами) 4 для управления светом, чтобы быть включать, или выключать, или понижать яркость в зависимости от распознанного присутствия. Светильник(и) 4 могут быть выполнены с возможностью управления напрямую посредством результатов распознавания, выведенных модулем обработки сигналов 15, или результатов распознавания, сообщенных блоком обработки 15 сигналов к отдельному блоку управления, например центральному контроллеру, ответственному за управление множеством светильников.
В вариантах воплощения блок 15 обработки сигналов передатчик 20 и приемник 22 интегрированы вместе в том же блоке (например, тот же корпусе) для формирования блока автономного датчика. Например, блок 15 обработки сигналов может принимать форму кода, сохраненного на встроенном запоминающем устройстве датчика 6, и выполнен для исполнения на встроенном процессоре датчика 6. Кроме того, в некоторых вариантах воплощения датчик 6 может быть интегрирован вместе в том же блоке (том же корпусе) в качестве светильника 4 для формирования автономного, управляемого автономно устройства освещения.
В альтернативных расположениях, как показано на Фиг. 4, приемопередатчик 18 не обязательно должен быть автономным и/или может не содержать тоже количество передатчиков 20, что и приемников 22. Вместо этого может быть обеспечено множество приемников 22 распределенных вокруг пространства 2 и обслуживаться общим передатчиком 20. Альтернативно или дополнительно, блок 15 обработки сигналов (или некоторые его элементы) может быть удаленным от передатчика 20 и/или приемника (ов) 22, например, как часть сигналов обработки центрального контроллера от нескольких приемников. В целом возможна любая комбинация интегрированных или распределенных компонентов.
Передатчик 20 выполнен с возможностью излучения ультразвукового сигнала. В вариантах воплощения сигнал излучается в виде серии импульсов определенной частоты (например, 40 кГц), но также может быть незатухающей волной, идентифицированной посредством собственной частоты (например, 40 кГц). Приемопередатчик 18 также содержит приемник 22 для приема отраженного эхо передаваемого сигнала, например передаваемых импульсов. Присутствие может быть распознано на основе обнаружения импульсов (или в более общем смысле сигнала), которые отражены эхом (отражены) от существа или другого объекта в соответствующем пространстве 2, например, посредством обнаружения движения на основе доплеровского сдвига между передаваемым сигналом и принятом эхо-сигналом. Технологии распознавания присутствия на основе отраженных эхо-сигналов сами по себе понятны специалистам в данной области техники.
Фиг. 2 иллюстрирует схему излучения импульсов и обнаружения эхо-сигналов этих импульсов для выполнения распознавания. Здесь датчик 6 выполнен с возможностью работы в соответствии с временным интервалом на основе схемы, в результате чего датчику 6 выделяется определенный временной интервал T1 схемы, в котором он выполняет свое распознавание. Временной интервал T1 возникает в повторяющиеся моменты в течение долгого времени, например, регулярно по времени. В вариантах воплощения существует также пространство между последовательными моментами данного временного интервала T1, например моменты этого временного интервала T1 возникающие через равные промежутки времени. Например, схема может содержать серию нескольких неповторяющихся последовательных моментов времени T1…TN и датчик 6 может быть одним из нескольких датчиков, работающих в той же окружающей среде, каждый из которых сконфигурирован с возможностью использования другого соответствующего одного из временных интервалов T1…TN. В этом случае последовательность повторяется в течение долгого времени с каждым датчиком, используя момент, соответствующий временному интервалу, в каждом повторяющимся моменте цикла.
Временные интервалы могут быть выделены с помощью центрального контроллера или на этапе ввода в эксплуатацию. В качестве альтернативы в вариантах воплощения каждый отдельный датчик или по меньшей мере датчик 6 выделяет собственный временной интервал автономно. В предназначенном для этого случае блок 15 обработки сигналов сконфигурирован с возможностью выбора временного интервала для себя и переключения на другой временной интервал, если он обнаружил помеху в текущем временном интервале от другого датчика в пределах диапазона прослушивания.
Блок обработки сигналов 15 датчика 6 содержит логическую схему 11 распознавания и логическую схему 13 управления. Логическая схема 11 распознавания выполнена с возможностью обрабатывать входящие сигналы, поступающие в приемник 22 для того, чтобы обнаружить, отображается ли существо, находящееся в пространстве 2. Например, это может быть сделано на основании движения - в случае обнаружения движения предполагается, это оно связано с живым существом, скорее всего человеком в типичном применении. Логическая схема 11 распознавания, таким образом, генерирует сигнал, величина которого представляет собой выходное значение приемника 22, что свидетельствует о присутствии, например, характерное размеру или скорости распознанного движения. Величина сигнала может быть представлена, например, с точки зрения амплитуды или мощности (квадрату амплитуды).
Передатчик 20 излучает импульс в начале одного момента своего временного интервала T1 и прослушивает на предмет любого эхо-сигнала, происходящего в остальной части этого момента временного интервала T1. Это представляет собой период измерения. Если величина сигнала, принимаемого в приемнике 22, превышает пороговое значение обнаружения, тогда логическая схема 11 распознавания определяет, что это положительный результат распознавания, свидетельствующий о том, что существо выявлено в пространстве 2 (конечно, логическая схема 11 распознавания не обязательно знает, что распознанное различаемое существо является живым, но воспринимает свойства распознанного существа, например движение, которое, вероятно, происходит от живого существа). За пределами момента соответствующего временного интервала T1, с другой стороны, логическая схема 11 распознавания не рассматривает принятые сигналы как указывающие присутствие и не должна обрабатывать эти сигналы, например, потому что именно теперь во время Т2…TN импульсы от других датчиков будут излучаться и/или потому что они будут представлять собой время пролета и, следовательно, расстояние от датчика, который находится за пределами диапазона интереса.
Логическая схема 13 управления выполнена с возможностью управления одним или более светильников 4 для включения и выключения и/или понижения яркости в зависимости от положительного результата определения возникновения входных сигналов, поступающих в приемник 22, в момент соответствующего интервала времени Т1. Логическая схема 13 управления также сконфигурирована с возможностью смягчения эффекта помехи в распознаваемом сигнале, что будет проиллюстрировано ниже.
При использовании датчиков, таких как основанные на импульсе, ультразвуковые датчики присутствия, обнаруженное присутствие (например движения) является результатом в сигнале определенной амплитуды. Например, амплитуда этого сигнала может быть связана с размером или скоростью движения. Идущий человек (и следовательно, делает крупные движения) выдает больший сигнал, чем человек, печатающий за компьютером. Никакое присутствие не приводит к более низкому амплитудному сигналу.
Тем не менее, принимаемый сигнал будет также содержать определенное количество искажений. Термин искажение используется здесь для обозначения любого случайного или бессмысленного шума и/или любых помех от другого источника передачи, например другого активного датчика в той же окружающей среде или любых других паразитных искажений (кроме полезного сигнала), которые не обязательно легко классифицируются, либо как совершенно случайных или из-за другого информационного сигнала. Например, гремящий набор ключей может создавать высокочастотные тона, которые создают помехи ультразвуковому датчику. В другом примере уровень шума также будет оказывать влияние посредством искажений в окружающей среде (т.е. воздушном потоке): большое количество воздуха выдает повышенный уровень шума. Например, это может быть результатом от кондиционирования воздуха.
Для того чтобы по меньшей мере смягчить эффект искажения, возникающего в окружающей среде 2, логическая схема 13 управления выполнена с возможностью обнаружения искажения и адаптирования распознавания в зависимости от результата. Обнаружение затем содержит внеполосное измерение, которое прослушивают за пределами ожидаемого диапазона полезного сигнала. Чтобы сделать это, логическая схема 13 управления выполнена с возможностью генерирования частотного представления сигнала, принимаемого через приемник 22 (например, применяя преобразование для преобразования из временного интервала, такое как быстрое преобразование Фурье или дискретное косинусное преобразование). Варианты воплощения обсуждаются в отношении Фиг. 5 и 6.
Как показано на Фиг.5, внеполосное измерение может принимать форму "широкополосного" измерения 24 во всем диапазоне 30 частот, включающем в себя ожидаемую полосу отражаемых эхом импульсов (т.е. полезного сигнала), но также выходящие за рамки этой полосы. Это измерение может быть выполнено за пределами периода измерения датчика 6, т.е. за пределами текущего распределенного временного интервала Т1.
Альтернативно или дополнительно, внеполосное измерение может принимать форму «побочной полосы» измерения 28, исключая ожидаемую полосу 32 полезного сигнала, и выполнятся только в боковых областях 34, расположенных по бокам этой полосы. Это измерение может быть выполнено внутри периода измерения датчика 6, т.е. в течение текущего распределенного временного интервала Т1.
При прослушивании внутри ожидаемой полосы и за пределами временного интервала датчика любой принимаемый сигнал рассматривается как паразитный (так как известно, что датчик 6 сам по себе не вызывает его).
В течение собственного временного интервала датчика, если никакое присутствие не возникает и помех от другого датчика нет или тому подобное, то измерение принятого сигнала будет просто выражаться в шуме. В случае движущегося объекта или человека сигнал будет увеличиваться за пределы этого минимального порогового уровня сигнала и будет подтверждено присутствие.
Однако при прослушивании внутри полосы собственного временного интервала датчика нет никакого способа различия между эхо-сигналом собственного излучаемого сигнала датчика и сигнала от источника помех. Он может нарушить работу датчика 6 присутствия, поскольку источник помех может привести к увеличению порогового значения обнаружения, это означает, что даже полезные сигналы теперь могут не превысить пороговое значение.
Соотношение между уровнем сигнала за пределами полосы и уровнем сигнала внутри полосы не обязательно может быть определено аналитически. Но можно считать, что когда уровень сигнала выше вне полосы, существует значительная вероятность, что уровень сигнала внутри полосы также быть увеличен. Возможно, хотя и менее вероятно, что существует только минимальное искажение за пределами полосы, но лучше перестраховаться, чем потом сожалеть. Поэтому в вариантах воплощения пороговое значение обнаружения датчика увеличивается в ответ на обнаружение внеполосного вывода. При работе с обычным движением датчик 6 будет видеть увеличение уровня сигнала только внутри полосы, а не за пределами.
В вариантах воплощения пороговое значение обнаружения увеличивается только временно. Если измерение искажения впоследствии обнаруживает повторяющееся искажение внутри или вблизи того же временного интервала, что и у датчика 6, то можно предположить, что оно следует из другого регулярно передающего источника, такого как другой активный датчик, работающий в пределах или вблизи того же временного интервала. В ответ датчик 6 затем переходит к другому временному интервалу и понижает пороговое значение обнаружения снова (т.е. восстанавливает чувствительность).
Пример операций, которые могут быть осуществлены посредством логической схемы 13 управления, теперь описывается со ссылкой на Фиг.6.
На этапе S10 до следующего момента текущего распределенного временного интервала T1 датчика упомянутая логическая схема 13 управления датчика выполняет пассивное сканирование 24 полного спектра 30. В вариантах воплощения логическая схема 13 управления датчика 6 имеет автономно распределенной датчик 6 с собственным временным интервалом, хотя альтернативно текущий временной интервал может быть распределенным по умолчанию на этапе ввода в эксплуатацию или посредством центрального контроллера.
Сканирование называется "полным" в том смысле, что оно не исключает полосу вблизи частоты активного полезного сигнала и распространяется по существу за пределами этого диапазона, предпочтительно распространяясь по обе ее стороны. Например, если частота ультразвукового импульса, используемая для активного распознавания, представляет собой 40 кГц, тогда полное или широкополосное сканирование 24 может распространяться непрерывно от 20 кГц до 60 кГц.
Тем не менее, это сканирование выполняется также непосредственно перед приближающимся временным интервалом, предпочтительно закончившись непосредственно перед ним. Следовательно, не смотря на то что сканирование происходит в той же полосе, что и полезный сигнал, оно происходит не совсем в то же время. Если любое искажение обнаружено непосредственно перед началом временного интервала, вполне вероятно, что оно будет распространяться в этом периоде.
На этапе S20 в начале следующего момента временного интервала датчиков логическая схема 11 распознавания управляет передатчиком 20, чтобы отправить импульс 26 ультразвука. Затем использует приемник 22 для выполнения обнаружения присутствия посредством прослушивания любых эхо-сигналов этого импульса, возникающего в остальной части временного интервала - что представляет собой полезный сигнал.
На этапе S30 во время периода измерения (например, текущего временного интервала T1) пока логическая схема 11 распознавания выполняет обнаружение присутствия (пока продолжается этап S20), логическая схема 13 управления будет сканировать искажение широкого спектра, исключая небольшую полосу 32 вблизи активного сигнала, используемого для обнаружения присутствия. Отсюда сканирование выполняется только в боковых областях 34 спектра вблизи этой полосы.
Следовательно, хотя это сканирование выполняется в то же время, как прослушивание полезного сигнала, оно выполняется в другой области спектра в непосредственной близости от полосы полезного сигнала. Если найдено какое-либо искажение только за пределами этой полосы, скорее всего, оно будет также распространяться в ней.
Следует отметить, что излучаемый сигнал может иметь только одну номинальную частоту, например 40 кГц, но следует понимать, что на практике принятые эхо-сигналы будут иметь определенный разброс в принятом спектре. Дополнительно, форма этого распространения в принципе считается расширенной помехой вблизи номинальной частоты, но на практике ширина полосы 32 считается связанной с эхо-сигналом, представляет собой диапазон, в котором эффект полезного сигнала считается значительным или не незначительным. Например, если частота ультразвукового импульса, используемая для активного распознавания, представляет собой 40 кГц, то сканирование 24 в побочной полосе может быть выполнено от 20 кГц до 35 кГц и от 45 кГц до 60 кГц, в результате чего 10 кГц полосы связывается с полезным эхо-сигналом (5 кГц по обе стороны номинальной определенной частоты).
Кроме того где упоминается, что датчик или один из его компонентов прослушивает или сканирует сигнал в определенное время или на определенных частотах - прослушивает ли полезный сигнал или сигнал из-за искажения - следует обратить внимание, что это не обязательно подразумевает, что передатчик 20 или приемник 22 физически работают по-разному. В вариантах воплощения передатчик 20 может продолжать передавать импульсы (частоту импульсов) через регулярные промежутки времени (например, в начале каждого момента своего распределенного временного интервала T1), и приемник 22 остается "открытым" для приема сигналов все время (например, на протяжении всех временных интервалов), но логическая схема 11 распознавания и/или логическая схема 13 управления сконфигурированы на прослушивание или на непрослушивание посредством одного из использования или игнорирования сигнала, принимаемого приемником 22 соответственно. Например, решение использовать или игнорировать сигнал может применяться в программном обеспечении, работающем на датчике 6.
На этапе S40 логическая схема 13 управления определяет, положительны ли или отрицательны результаты пассивных сканирований.
Если результаты пассивных сканирований отрицательны, то на этапе S50 пороговое значение обнаружения, применяемое логической схемой 11 распознавания, оставляют неизменным. Таким образом, сохраняется текущая чувствительность датчика 6. Обнаружение присутствия тогда продолжает выполняться как обычно на этапе S90, и способ возвращается к этапу S10, который будет повторен для последующих моментов текущего распределенного временного интервала T1.
Если, с другой стороны, результат пассивных сканирований отрицателен, то на этапе S70 логическая схема 13 управления управляет логической схемой 11 распознавания для увеличения порогового значения обнаружения присутствия. На этапе S90 обнаружение присутствия тогда выполняется на основе увеличенного порогового значения, и способ возвращается к этапу S10, который будет повторен для последующих моментов временного интервала T1.
В вариантах воплощения условие для увеличения порогового значения обнаружения может состоять в том, что любое из сканирований положительно или что оба из сканирований положительны.
Увеличение порогового значения обнаружения приведет к наименьшей вероятности ошибочных результатов. Тем не менее, это также означает, что чувствительность датчика 6 к подлинным событиям присутствия уменьшится. Для решения этой проблемы в вариантах воплощения настоящего изобретения логическая схема 13 управления сконфигурирована с возможностью определения, является ли обнаруженное искажение повторяющимся, то есть возникают многочисленные последовательные моменты текущего распределенного временного интервала T1. Это показано на этапе S60 на Фиг.6.
Критерий для определения повторения может быть установлен в двух моментах временного интервала T1 или трех или более. В вариантах воплощения условие для обнаружения повторения может состоять в том, что любое из сканирований неоднократно положительно или что оба из сканирований неоднократно положительны.
Если результаты пассивных сканирований неоднократно положительны, то способ переходит к этапу S80, где логическая схема 13 управления введет алгоритм назначения временного интервала, чтобы найти новый соответствующий временной интервал для выполнения измерений обнаружения присутствия. Иначе способ переходит к этапу S70, где пороговое значение обнаружения увеличивается, как обсуждено выше. Способ возвращается к этапу S10, который будет повторен для последующих моментов текущего распределенного временного интервала T1.
В вариантах воплощения новый временной интервал может быть выбран автономно логической схемой 13 управления на самом датчике 6 посредством подбора нового временного интервала, отличного от текущего - если он по-прежнему совпадает с другим активным датчиком после переключения, который вскоре будет определен тем же процессом, и при этом новый временной интервал можно подобрать, и т.д. до тех пор, пока временной интервал не найден. Альтернативно логическая схема 13 управления может переключать временной интервал посредством переноса к центральному контроллеру.
Следует иметь в виду, что упомянутые выше варианты воплощения были описаны только в качестве примера.
Например, распознавание присутствия не ограничивается обнаружением движения ни распознаванием человека. Вообще технологии обнаружения присутствия доступны для распознавания либо движения или наличия любого существа (человека ли или другого живого существа) или другого живого или неживого объекта. Дополнительно, вышеупомянутые технологии не должны быть ограничены в отношении ультразвукового распознавания, но могут быть распространены для любой активной технологии обнаружения, основанной на излучении любого сигнала (например, механическое или электромагнитное излучение) и принимающей обратно эхо-сигнал такого сигнала. Когда датчик представляет собой ультразвуковой датчик, тогда приемник 22 может быть или не быть специализированным для приема только ультразвука. В вариантах воплощения, помимо измерения ультразвукового контента, такие микрофоны могут также использоваться для приема слышимого звука.
Дополнительно, раскрытые здесь технологии могут быть распространены на другие способы управления светом, обеспеченные внутри пространства, например гелиостатное или оконное приспособление (например, автоматические жалюзи); или действительно другие функции обеспеченного пространства для существа или в пользу того, чтобы быть ожидаемым в пространстве, таком как кондиционирование воздуха или нагревание. Где функция является светом, не ограничивается тем, чтобы быть включенным и выключенным в виде да/нет, но управление может также расшириться до снижения яркости света переменным способом.
Согласно некоторым вышеупомянутым вариантам воплощения, было описано, что логическая схема 13 управления может прослушивать искажения внутри текущего распределенного временного интервала в области спектра, исключая полосу частот полезного сигнала. Тем не менее, хотя некоторая погрешность может подвергать в характерном искажении от полезного сигнала, что не исключено, что область спектра, используемого для прослушивания помех даже внутри того же временного интервала, может пересекаться с полосой частот полезного сигнала.
Как упоминается выше, значение представляет собой предельное или пороговое значение (или тому подобное), что охватывает варианты либо операции типа "меньше чем", либо операции типа "меньше или равно". Аналогичным образом, если упомянуто, что значение находится за пределами или превышает предельное или пороговое значение (или тому подобное), это охватывает варианты либо операции типа "больше чем", либо операции типа "больше чем или равно".
Другие варианты в соответствии с настоящим изобретением могут быть поняты и осуществляться специалистами в данной области техники при применении заявленного изобретения, при изучении чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения слово "содержащий" не исключает другие элементы или этапы, и употребление элементов или этапов в единственном числе не исключает их множества. Один процессор или другой блок могут выполнять функции нескольких элементов в формуле изобретения. Тот факт, что определенные меры перечислены во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих мер не может быть использована для целесообразности. Компьютерная программа может храниться/размещаться на соответствующем носителе, таком как оптический носитель или твердотельный носитель, соединенный вместе с или как часть других аппаратных средств, но также может быть размещена в других формах, например через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные обозначения в формуле изобретения не должны быть истолкованы как ограничивающие объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБНАРУЖЕНИЕ ИНТЕРФЕРЕНЦИИ В СЕТИ АКТИВНЫХ ДАТЧИКОВ | 2013 |
|
RU2617324C2 |
| АУДИОСИСТЕМА И СПОСОБ ОПЕРИРОВАНИЯ ЕЮ | 2012 |
|
RU2595943C2 |
| СИГНАЛИЗАЦИЯ ФИЗИЧЕСКОГО УРОВНЯ ПАРАМЕТРОВ УПРАВЛЕНИЯ ДЛЯ ТЕХНОЛОГИЙ МНОЖЕСТВЕННОГО РАДИОДОСТУПА | 2010 |
|
RU2519056C2 |
| ДЕТЕКТОР ПРИСУТСТВИЯ И СПОСОБ РАБОТЫ ДЕТЕКТОРА ПРИСУТСТВИЯ | 2013 |
|
RU2648969C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБРАБОТКИ АУДИОСИГНАЛА | 2017 |
|
RU2725017C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЗВУКОВОГО СИГНАЛА | 2010 |
|
RU2517315C2 |
| Гидролокатор с трактом прослушивания эхо-сигналов | 2017 |
|
RU2649655C1 |
| УПРАВЛЕНИЕ УСТРОЙСТВАМИ ОСВЕЩЕНИЯ | 2013 |
|
RU2632248C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПЛАСТОВОГО ФЛЮИДА ПРИ ЯДЕРНО-МАГНИТНОМ КАРОТАЖЕ | 2006 |
|
RU2393509C2 |
| ОПТИМИЗИРОВАННОЕ СОЧЕТАНИЕ ПРЕАМБУЛЫ И ПОЛЕЙ ДАННЫХ ДЛЯ СЕТЕЙ ДАТЧИКОВ, ИМЕЮЩИХ НИЗКОЕ ПОТРЕБЛЕНИЕ ЭЛЕКТРИЧЕСТВА, НА ОСНОВЕ СПОСОБА РАЗДЕЛЕНИЯ ТЕЛЕГРАММ | 2017 |
|
RU2750043C2 |


Изобретение относится к системе управления одним или более устройствами освещения в зависимости от обнаруженного пребывания внутри комнаты, коридора или другого внутреннего или наружного пространства. Техническим результатом является повышение достоверности определения присутствия существа или объекта в пространстве. Результат достигается тем, что блок обработки сигналов содержит логическую схему распознавания для распознавания присутствия существа или объекта в пространстве, используя эхо-сигналы упомянутого сигнала, отраженные от существа или объекта, при этом эхо-сигналы принимаются с соответствующей полосой частот. Блок обработки сигналов дополнительно содержит логическую схему управления для обнаружения искажения, которое может негативно повлиять на упомянутое распознавание, причем логическая схема управления сконфигурирована с возможностью обнаружения упомянутого искажения посредством прослушивания паразитного сигнала в области спектра за пределами полосы частот эхо-сигналов и адаптирования распознавания в зависимости от обнаруженного искажения. 3 н. и 12 з.п. ф-лы, 6 ил.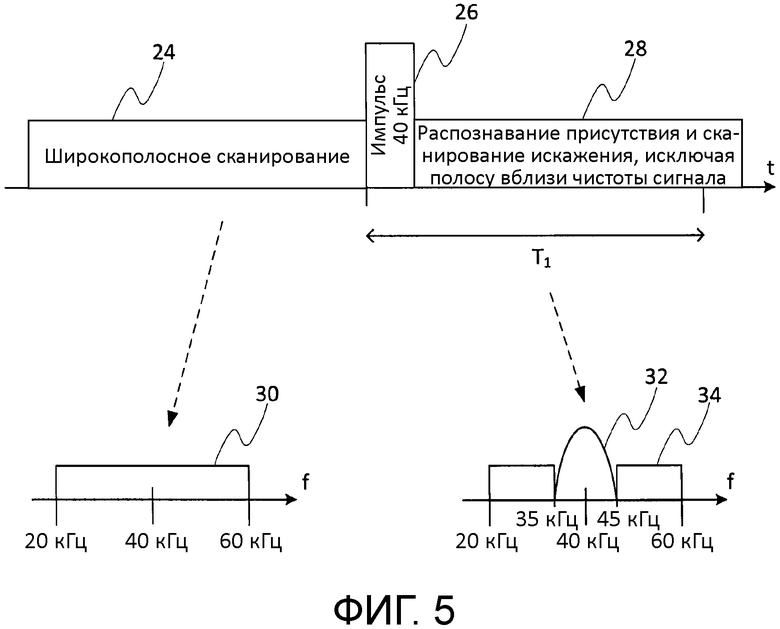
1. Блок (15) обработки сигналов для использования с приемником (22) для приема эхо-сигналов излучаемого сигнала, причем блок обработки сигналов содержит:
логическую схему (11) распознавания для распознавания присутствия существа или объекта в пространстве, используя эхо-сигналы упомянутого сигнала, отраженные от существа или объекта, при этом эхо-сигналы принимаются c соответствующей полосой частот в спектре; и
логическую схему (13) управления для обнаружения искажения, которое может негативно повлиять на упомянутое распознавание, причем логическая схема управления сконфигурирована с возможностью обнаружения упомянутого искажения посредством прослушивания паразитного сигнала в области спектра за пределами полосы частот эхо-сигналов и адаптирования распознавания в зависимости от обнаруженного искажения.
2. Блок обработки сигналов по п. 1, в котором:
упомянутый сигнал содержит серию импульсов, каждый из которых излучается в соответствующий момент временного интервала; и
логическая схема (11) распознавания сконфигурирована с возможностью выполнения упомянутого распознавания посредством прослушивания эхо-сигнала в каждый из моментов временного интервала.
3. Блок обработки сигналов по п. 2, в котором логическая схема (13) управления сконфигурирована с возможностью обнаружения искажения, возникающего во временном интервале, посредством прослушивания паразитного сигнала в области спектра за пределами полосы частот эхо-сигналов импульсов.
4. Блок обработки сигналов по п. 3, в котором для обнаружения искажения, возникающего во временном интервале, логическая схема (13) управления сконфигурирована с возможностью прослушивания на предмет паразитного сигнала в области спектра, исключая полосу частот эхо-сигналов импульсов.
5. Блок обработки сигналов по любому предшествующему пункту, в котором логическая схема (13) управления сконфигурирована с возможностью обнаружения искажения посредством прослушивания паразитного сигнала во всем диапазоне частот, включающем в себя полосу эхо-сигналов и продолжающемся за пределы упомянутой полосы.
6. Блок обработки сигналов по п. 3, в котором для прослушивания искажения во всем упомянутом диапазоне частот логическая схема (13) управления сконфигурирована с возможностью прослушивания вне упомянутого временного интервала.
7. Блок обработки сигналов по п. 2, в котором логическая схема (13) управления сконфигурирована с возможностью обнаружения того, выявлено ли возникновение искажения в повторяющиеся моменты упомянутого временного интервала.
8. Блок обработки сигналов по п. 7, в котором упомянутый временной интервал является одним распределенным из схемы временных интервалов и логическая схема (13) управления сконфигурирована с возможностью адаптирования упомянутого распознавания посредством переключения на другой из упомянутых временных интервалов в ответ на обнаружение искажения в или вблизи повторяющихся моментов в настоящее время распределенного временного интервала.
9. Блок обработки сигналов по п. 1, в котором для использования с активным датчиком (6), содержащим упомянутый приемник (22) и передатчик (20) для излучения излучаемого сигнала, датчик (6) должен быть использован среди одного или более других активных датчиков, каждый из которых содержит соответствующий передатчик и приемник; и при этом искажение содержит помеху от одного из других активных датчиков.
10. Блок обработки сигналов по п. 9, в котором каждый из активных датчиков использует соответствующий временной интервал упомянутой схемы для излучения соответствующего сигнала для выполнения распознавания, и при этом помеха исходит от одного из других активных датчиков, излучающего свой соответствующий сигнал в том же временном интервале.
11. Блок обработки сигналов по п. 7, в котором логическая схема (13) управления сконфигурирована с возможностью адаптирования упомянутого распознавания посредством регулировки чувствительности упомянутого распознавания в зависимости от обнаруженного искажения.
12. Блок обработки сигналов по п. 6, в котором логическая схема (13) управления сконфигурирована с возможностью обнаружения искажения посредством как (i) прослушивания на предмет паразитного сигнала во всем упомянутом диапазоне частот, но вне упомянутого временного интервала, так и (ii) прослушивания на предмет паразитного сигнала внутри упомянутого временного интервала, но за пределами полосы частот эхо-сигналов.
13. Блок обработки сигналов по п. 11, в котором блок управления сконфигурирован так, чтобы: если чувствительность уменьшается в ответ на обнаруженное искажение и если искажение было впоследствии выявлено повторяющимся, то временной интервал переключается и чувствительность увеличивается.
14. Система освещения, содержащая:
блок (15) обработки сигналов согласно любому предыдущему пункту;
приемник (22), выполненный с возможностью приема эхо-сигналов излучаемого сигнала;
передатчик (20), выполненный с возможностью излучения упомянутого сигнала; и
одно или более устройств (4) освещения;
при этом логическая схема (13) управления сконфигурирована с возможностью управления одним или более устройствами освещения в зависимости от распознавания.
15. Машиночитаемый носитель данных, на котором хранится компьютерная программа, для распознавания нахождения существа или объекта в пространстве с помощью эхо-сигналов излучаемого сигнала, отраженного от существа или объекта, причем компьютерная программа выполнена таким образом, чтобы при исполнении ее на процессоре выполнялись операции, согласно которым:
выполняют распознавание на основе упомянутых эхо-сигналов, причем эхо-сигналы принимаются с соответствующей полосой частот в спектре;
обнаруживают искажение, которое может негативно повлиять на упомянутое распознавание, посредством прослушивания паразитного сигнала в области спектра за пределами полосы частот эхо-сигналов; и
адаптируют распознавание в зависимости от обнаруженного искажения.
| WO 2011151772 A1, 2011.12.08 | |||
| WO 2012176101 A2, 2012.12.27 | |||
| US 2010296285 A1, 2010.11.25 | |||
| US 6909668 B2, 2005.06.21 | |||
| US 5973996 A, 1999.10.26 | |||
| Четырех планчатое мотовило к жатвенной машине для уборки прямостойных и полеглых хлебов | 1956 |
|
SU106482A1 |

