Способ определения усредненного вектора скорости ветра с помощью беспилотного летательного аппарата относится к метеорологии и предназначен для измерения метеовеличин в вертикальном разрезе атмосферы в определенной географической точке.
Известны способы и устройства для определения скорости и направления ветра путем использования воздушных шаров или радиозондов (Патент на изобретение РФ №2101736, МПК G01W 1/02, 01.10.1998, патенты на полезные модели №103195, МПК G01W 1/08, 01.12.2010, №92204, МПК G01W 1/02, 10.03.2010).
Недостатком таких технических решений является невозможность проведения измерений в заранее выбранных географических координатах вследствие неуправляемости зонда.
Наиболее близким является способ, описанный в устройстве для определения скорости и направления ветра на заданной высоте, который выбран в качестве прототипа. Способ заключается в запуске зонда в интересующую область пространства на заданную высоту с помощью специальных средств, обеспечении движения зонда в горизонтальном направлении по ветру и регистрации скорости и направления ветра с помощью специальных средств. Зонд снабжен системой спутниковой навигации, электронным гироскопом, электронным магнитным компасом (Патент РФ 98256, МПК G01W 1/00, 27.04.2010).
Недостатком прототипа является невозможность выбора координат точки проведения измерений.
Задачей изобретения является расширение функциональных возможностей, повышение точности позиционирования зонда.
Технический результат - расширение функциональных возможностей, а именно возможность измерения усредненного вектора скорости ветра в вертикальном разрезе атмосферы.
Технический результат достигается тем, что, как и в известном способе определения усредненных значений скорости и направления ветра, запускают зонд в интересующую область пространства на заданную высоту, направляя информацию на радиоприемную систему, при этом зонд снабжен системой спутниковой навигации, электронным гироскопом, электронным магнитным компасом.
В отличие от известного способа, в предлагаемом техническом решении в качестве зонда используют беспилотный летательный аппарат (БПЛА) с известными калибровочными характеристиками влияния ветра на наклон вектора тяги, способный зависать в заданной точке пространства и снабженный датчиками наклона, температуры, давления, влажности и потребляемой двигателями мощности, который, при достижении им нужной точки с заранее выбранными географическими координатами переводят в режим удержания географических координат, равномерного движения по вертикали, затем запускают режим равномерного вращения вокруг вертикальной оси, через промежутки времени, кратные полному обороту аппарата вокруг вертикальной оси, измеряют калибровочные характеристиками БПЛА, фиксируя наклон вектора тяги БПЛА, потребляемую двигателями мощность, атмосферное давление, температуру и влажность воздуха, при этом полный оборот и направление БПЛА определяют с помощью электронного магнитного компаса, используя заранее известные калибровочные характеристики и вновь измеренные, определяют направление и скорость ветра в вертикальном разрезе.
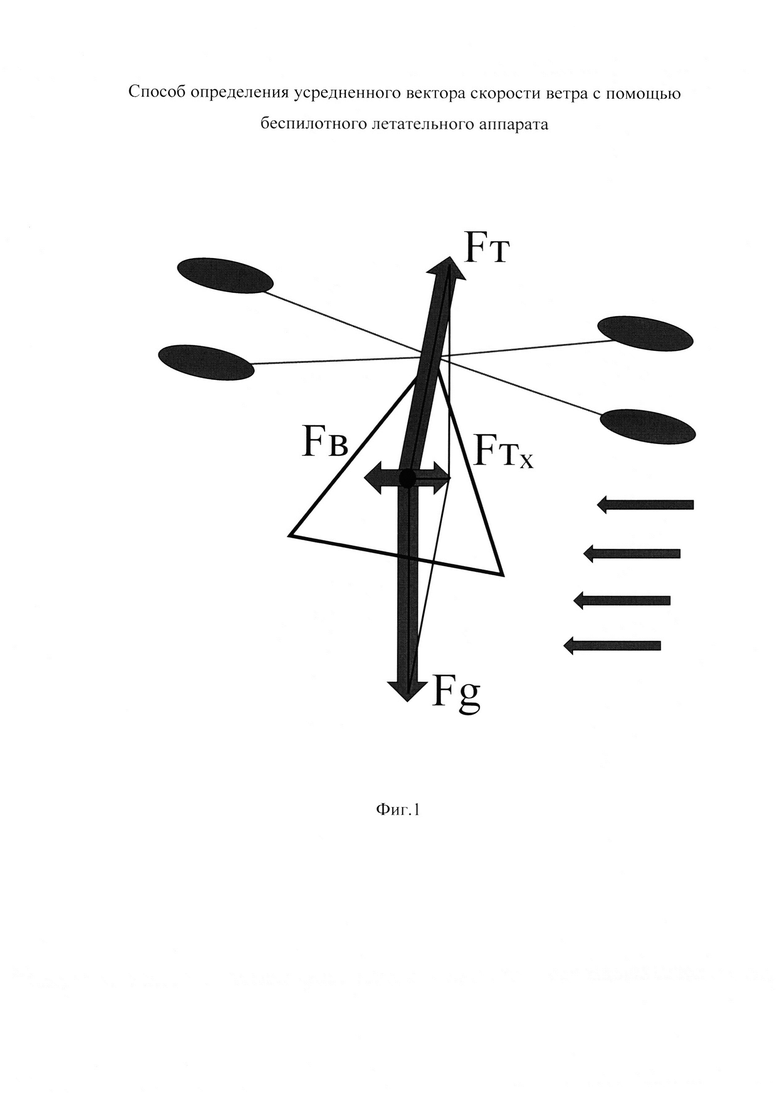
Режим удержания координат проиллюстрирован на фиг. 1.
Он характеризуется равновесием горизонтальной (Fтx) проекции тяги (Fт) БПЛА, находящегося в наклонном положении, и силы Fв, с которой ветер воздействует на БПЛА (см. фиг. 1). При этом БПЛА может перемещаться по вертикали или находиться на неизменной высоте, в зависимости от соотношения между вертикальной проекцией тяги и весом (Fg) БПЛА.
Наклон вектора тяги БПЛА в описанном выше режиме однозначно соответствует усредненному движению ветра в данной точке пространства при известных значениях атмосферного давления, влажности и температуры, а также суммарной мощности, развиваемой двигателями БПЛА. Кратность оборотов вокруг оси БПЛА нивелирует асимметрию его парусности. Вращение БПЛА также повышает его устойчивость за счет возникновения момента инерции. Для определения вектора средней скорости ветра необходимо использовать заранее измеренную при калибровке системы зависимость между наклоном БПЛА α, вектором скорости ветра Fв, углом поворота корпуса БПЛА ϕ, атмосферным давлением Р, влажностью ψ, температурой Т и суммарной мощностью W, развиваемой двигателями БПЛА:

При одновременном запуске нескольких БПЛА в разных точках можно получить объемную модель метеопроцессов в рассматриваемой области пространства. Также использование нескольких БПЛА, одновременно сканирующих равноподеленные между ними участки единого вертикального разреза может служить для сокращения времени регистрации быстропротекающих процессов в атмосфере, при этом время получения вертикального разреза уменьшается в N раз, где N - количество одновременно запускаемых БПЛА.
Способ осуществляется следующим образом.
1. БПЛА, способный зависать в воздухе, имеющий спутниковую систему навигации, гироскоп, магнитный компас, датчики потребляемой двигателями суммарной мощности, атмосферного давления, влажности и температуры, помещают в аэродинамическую трубу и определяют зависимость между наклоном БПЛА α, вектором скорости ветра Fв, углом поворота корпуса БПЛА ϕ, атмосферным давлением Р, влажностью ψ, температурой Т и суммарной мощностью W, развиваемой двигателями БПЛА, в виде:

2. Запускают БПЛА в интересующую область пространства.
3. Переводят БПЛА в режим удержания географических координат и равномерного движения по вертикали, после чего придают БПЛА равномерное вращение вокруг вертикальной оси. Начинают фиксацию показаний бортовых навигационных приборов и датчиков через промежутки времени, кратные полному обороту аппарата вокруг вертикальной оси. Полный оборот и направление БПЛА определяют с помощью электронного магнитного компаса.
4. Используя заранее измеренную при калибровке системы зависимость наклона БПЛА от вектора скорости ветра, давления, влажности и температуры, определяют направление и величину трехмерного вектора средней скорости ветра в каждой точке траектории движения БПЛА.
5. Исходные данные передают на наземную станцию управления по штатному радиоканалу (телеметрия).
Можно перемещать БПЛА по вертикали для непрерывных измерений в вертикальном разрезе атмосферы, либо удерживать БПЛА на месте для точечных измерений, либо осуществить приземление БПЛА для замены аккумуляторных батарей.
Данный алгоритм может выполняться автоматически, по программе.
Измеренные величины передаются наземной станции управления с телеметрией и анализируются автоматически в режиме реального времени.
Таким образом может быть рассчитан усредненный вектор скорости ветра на вертикальном разрезе.
Возможен вариант, в котором измеряемые величины записываются на сменный носитель, устанавливаемый на БПЛА. Расчеты ведутся после посадки БПЛА.
Дополнительные достоинства: независимость от состояния облачности, тумана; произвольный выбор точки измерения; управляемый возврат зонда в точку старта по завершении измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения усредненного вектора скорости ветра | 2016 |
|
RU2617020C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСРЕДНЕННЫХ ЗНАЧЕНИЙ ГОРИЗОНТАЛЬНОЙ И ВЕРТИКАЛЬНОЙ СОСТАВЛЯЮЩИХ СКОРОСТИ ВЕТРА И ЕГО НАПРАВЛЕНИЯ | 2016 |
|
RU2616352C1 |
| Способ определения усредненного вектора скорости ветра с помощью беспилотного летательного аппарата | 2018 |
|
RU2695698C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСРЕДНЕННЫХ ЗНАЧЕНИЙ ГОРИЗОНТАЛЬНОЙ И ВЕРТИКАЛЬНОЙ СОСТАВЛЯЮЩИХ СКОРОСТИ ВЕТРА И ЕГО НАПРАВЛЕНИЯ | 2016 |
|
RU2650094C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНЫХ РАСПРЕДЕЛЕНИЙ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2018 |
|
RU2692736C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСРЕДНЕННЫХ ЗНАЧЕНИЙ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2015 |
|
RU2600519C1 |
| Способ определения усредненных значений метеорологических параметров в пограничном слое атмосферы | 2019 |
|
RU2727315C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2744772C1 |
| Способ определения скорости и направления ветра и устройство для измерения скорости и направления ветра | 2020 |
|
RU2770563C1 |
| Способ определения высоты шероховатости поверхности водоема | 2022 |
|
RU2796383C1 |
Изобретение относится к области метеорологии и может быть использовано для определения направления и скорости ветра в вертикальном разрезе. Сущность: в интересующую область пространства запускают беспилотный летательный аппарат (БПЛА), для которого заранее определена калибровочная зависимость между наклоном вектора тяги, вектором скорости ветра, углом поворота корпуса БПЛА, атмосферным давлением, влажностью, температурой и суммарной мощностью, развиваемой двигателями БПЛА. При этом БПЛА, выполненный способным зависать в заданной точке пространства, при достижении нужной точки с заранее выбранными координатами переводят в режим удержания географических координат и равномерного движения по вертикали, а затем запускают режим равномерного вращения вокруг вертикальной оси. Через промежутки времени, кратные полному обороту БПЛА вокруг вертикальной оси, измеряют наклон вектора тяги, потребляемую двигателями мощность, атмосферное давление, температуру и влажность воздуха. При этом полный оборот и направление БПЛА определяют с помощью электронного магнитного компаса. Используя полученную при калибровке зависимость и вновь измеренные характеристики, определяют направление и скорость ветра в вертикальном разрезе. Технический результат: расширение функциональных возможностей, повышение точности позиционирования зонда. 1 ил.
Способ определения усредненного вектора скорости ветра с помощью беспилотного летательного аппарата, по которому в интересующую область пространства запускают зонд, снабженный навигационными приборами, отличающийся тем, что в качестве зонда используют беспилотный летательный аппарат (БПЛА) с известными калибровочными характеристиками влияния ветра на наклон вектора тяги, способный зависать в заданной точке пространства и снабженный датчиками наклона, температуры, давления, влажности и потребляемой двигателями мощности, который при достижении им нужной точки с заранее выбранными географическими координатами переводят в режим удержания географических координат, равномерного движения по вертикали, затем запускают режим равномерного вращения вокруг вертикальной оси, через промежутки времени, кратные полному обороту аппарата вокруг вертикальной оси, измеряют калибровочные характеристиками БПЛА, фиксируя наклон вектора тяги БПЛА, потребляемую двигателями мощность, атмосферное давление, температуру и влажность воздуха, при этом полный оборот и направление БПЛА определяют с помощью электронного магнитного компаса, используя заранее известные калибровочные характеристики и вновь измеренные, определяют направление и скорость ветра в вертикальном разрезе.
| RU 2013151242 A, 27.05.2015 | |||
| CN 205139164 U, 06.04.2016 | |||
| Способ измерения средних направления и скорости ветра | 1976 |
|
SU593150A1 |

