Изобретение относится к области метеорологического приборостроения и может быть использовано для оперативного дистанционного определения скорости и направления ветра.
В настоящее время для измерения скорости ветра широко используются различного типа анемометры, а именно:
- крыльчатые и чашечные, при использовании которых механический счетчик фиксирует количество оборотов насаженной на прибор крыльчатки или чашек за определенное время. Недостатком таких анемометров является наличие механических движущихся деталей, наличие минимально не измеряемой скорости ветра за счет наличия сопротивления качения, загрязнение подшипников вращения, возможность налипания на крыльчатку снега, пыли, грязи и пр.;
- тепловые, которые работают по электронной схеме. Измерение осуществляется за счет нагрева нити накаливания и анализа ее сопротивления при движении воздуха. Недостатком таких анемометров является низкая надежность работы ввиду частого повреждения спирали, большой ток потребления, необходимость использования дополнительного датчика температуры воздуха и давления (для точного измерения);
- ультразвуковые, которые отслеживают скорость потоков воздуха, ориентируясь на скорость звуков, зависящих от направления ветра. Недостатком таких анемометров является высокая стоимость устройства за счет применения нескольких высокоточных датчиков, необходимость использования дополнительного датчика температуры воздуха и давления (для точного измерения), возможность налипания льда, снега и грязи на измерительные датчики, необходимость начальной ориентации датчика по сторонам света для определения направления движения воздуха.
Для измерения направления ветра широко используются различного типа флюгеры, в том числе механические с электронным съемом угла поворота. Для измерения угла поворота существуют различные способы: оптические, резистивные, магнитные, индуктивные, механические. Кроме того, могут использовать закрепленный на валу флюгера электронный компас.
Недостатком таких устройств является применение механических деталей, наличие сопротивления воздуха, сложность определения направления ветра при минимальной его скорости.
Кроме того, указанные выше приборы не могут одновременно измерять и скорость и направление ветра. Они основаны на измерении одного из таких параметров.
Из уровня техники известно устройство для определения скорости и направления ветра на заданной высоте, содержащее газонаполненную оболочку с радиопередатчиком, радиоприемную систему и систему, обеспечивающую движение газонаполненной оболочки в горизонтальном направлении по ветру. Система, обеспечивающая движение газонаполненной оболочки в горизонтальном направлении по ветру, содержит блок определения заданной высоты, подключенный к блоку управления клапаном, который с одной стороны подсоединен к внутреннему объему газонаполненной оболочки, а с другой стороны выведен наружу в атмосферу (см. Патент RU 98256, опубликован 10.10.2010).
Недостатком такого устройства является отсутствие возможности измерения скорости и направления ветра на низких высотах и на уровне земли, а также в конкретном заданном неизменном и неподвижном месте, сложность конструкции устройства.
Наиболее близким решением к предложенному устройству является прибор для определения направления и скорости ветра, содержащий датчик, блок питания и измерительный пульт. Датчик содержит вертикальный лопастной ротор и обтекаемый свободно вращающийся на опорной трубе-мачте кожух со стабилизатором, закрывающий пространство, в котором лопасти ротора движутся против ветра, а также реостат, укрепленный на опорной трубе-мачте, с подвижным элементом, прикрепленным к кожуху, четырехполюсный или многополюсный постоянный магнит, прикрепленный к вертикальному лопастному ротору, и катушку с сердечником, закрепленную в опорной трубе-мачте. Измерительный пульт содержит вольтметр, подключенный последовательно с реостатом к блоку питания, и миллиамперметр, подключенный через выпрямитель к катушке с сердечником (см. Патент RU 2101736, опубликован 10.01.1998).
Недостатком наиболее близкого решения является невысокая точность определения скорости и направления ветра, наличие погрешностей в измерении при минимальной скорости ветра, сложность конструкции прибора, наличие движущихся частей, а значит низкая надежность, ограничения по условиям эксплуатации (запыленные условия, условия налипания снега и пр.), высокая стоимость прибора.
Из уровня техники известны способы определения скорости и направления ветра, основанные на использовании оптических или электромагнитных излучений.
Так, известен способ определения скорости и направления ветра, включающий использование некогерентного доплеровского лидара, основанного на излучении лазера и приеме рассеянного излучения (см. Патент RU 2545498, опубликован 10.04.2015).
Также известен способ оперативного дистанционного определения скорости и направления ветра заключающийся в том, что атмосферу зондируют двумя импульсными лазерными пучками, распространяющимися с малым до угловым расстоянием между ними, регистрируют сигналы от рассеивающих объемов аэрозольных неоднородностей в атмосфере, облучение атмосферы осуществляют короткими лазерными импульсами с длительностью, определяемой минимальным расстоянием между рассеивающими объемами в атмосфере и скоростью света, определяют минимальные значения взаимно-структурных функций между сигналом от рассеивающего объема первого пучка и сигналами от рассеивающих объемов второго пучка, принимают за направление ветра направление между рассеивающим объемом и рассеивающим объемом с наименьшим минимальным значением взаимно-структурной функции, определяют величину и знак скорости ветра по временному положению минимума взаимно-структурной функции сигналов для этих рассеивающих объемов и по расстоянию между этими объемами (см. Патент RU 2404435, опубликован 20.11.2010).
Также известен способ дистанционного измерения скорости и направления ветра, заключающийся в помещении в интересующуюся область пространства отражателей, движущихся под действием ветра и пропорционально его скорости, облучении отражателей электромагнитным сигналом и приеме сигнала, отражающего от них с различных ракурсов приема, измерении пропорционального скорости ветра доплеровского сдвига и истинного пеленга отражателя, вычислении скорости ветра и направления ветра. При приеме сигнала для каждого пеленга приема измеряют глубину амплитудной модуляции принятого сигнала и скорость ветра, определяют наибольшее значение глубины амплитудной модуляции и наибольшее значение скорости ветра. Направление ветра определяют относительно северного направления геофизического меридиана. Осуществляют обработку отраженного сигнала в измерительном и двух пеленгационных каналах, причем приемные антенны пеленгационных каналов размещают на концах лопастей несущего винта вертолета, а приемопередающую антенну измерительного канала устанавливают над втулкой винта вертолета, осуществляют обработку принятых сигналов (см. Патент RU 2449311, опубликован 28.09.2010).
Недостатком таких способов является необходимость размещения (разбрасывания) в пространстве для каждого измерения отражателей, а также необходимость обеспечения радиоизлучения для определения положения отражателей. Необходимость радиоизлучения требует мощного электропитания, разрешения на использование радиочастот и пр., что существенно ограничивает возможность массового применения.
Наиболее близким к предложенному способу является способ определения усредненных значений скорости и направления ветра в заданной точке пространства, заключающийся в запуске зонда, снабженного системой спутниковой навигации, электронным гироскопом, электронным магнитным компасом, в интересующую область пространства, отслеживании траектории его движения под действием ветра. При этом в качестве зонда используют беспилотный летательный аппарат (БПЛА), способный возвращаться в заданную точку. Запускают БПЛА в заранее выбранную точку с заданными географическими координатами и на нужную высоту, переводят БПЛА в режим удержания высоты и горизонтального положения путем перевода суммарного вектор тяги БПЛА в вертикальное направление относительно земной поверхности. Затем запускают режим равномерного вращения вокруг вертикальной оси и через время, необходимое для уравнивания скорости БПЛА относительно ветра, измеряют с помощью системы спутниковой навигации широту и долготу первой точки и текущее время, а через время, кратное полному обороту аппарата вокруг вертикальной оси, измеряют координаты и время второй точки. При этом полный оборот и направление БПЛА определяют с помощью электронного магнитного компаса, после чего, решая обратную геодезическую задачу, рассчитывают направление и скорость ветра (см. Патент RU 2600519, опубликован 20.10.2016).
Недостатком наиболее близкого решения является непригодность реализации способа для массового использования, сложность осуществления способа, наличие ограничений в применении БПЛА в различных зонах.
Технической проблемой, решаемой изобретением, является существенное повышение точности оперативных дистанционных определений скорости и направления ветра при одновременном упрощении конструкции устройства и осуществления способа измерения, упрощение процессов поддержки жизненного цикла устройства - внедрения, эксплуатации, обслуживания, выведения из эксплуатации
Техническим результатом изобретения является обеспечение возможности высокоточного определения скорости и направления ветра при любых скоростях воздушных потоков в любых местах и на любой высоте относительно земной поверхности, при одновременном повышении надежности дистанционного определения скорости и направления ветра.
Технический результат изобретения достигается благодаря тому, что устройство для измерения скорости и направления ветра содержит корпус, соединенный с гибким подвесом, средство электропитания и соединенные со средством электропитания контроллер управления, передающее устройство и акселерометр, причем передающее устройство и акселерометр соединены с контроллером управления, акселерометр расположен внутри корпуса, а центр тяжести корпуса с акселерометром совмещен с геометрическим центром корпуса.
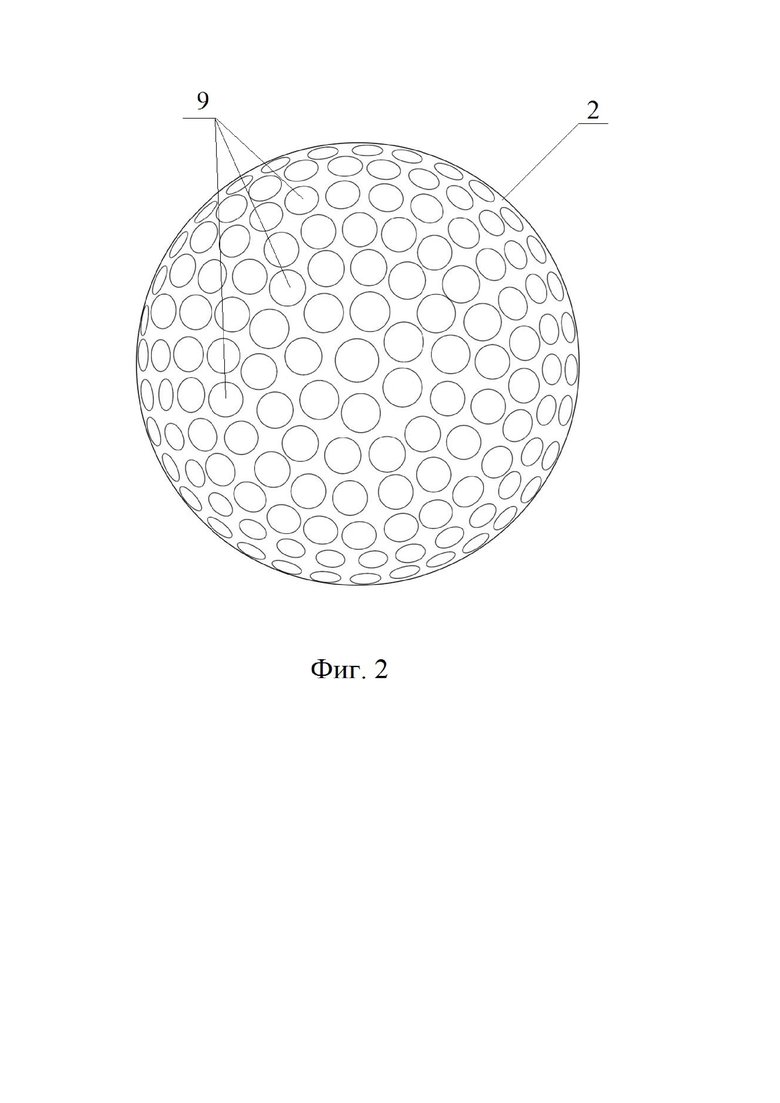
Кроме того, корпус может иметь сферическую поверхность с впадинами и/или выступами.
Кроме того, устройство может дополнительно содержать компас.
Кроме того, средство электропитания и/или контроллер управления, и/или передающее устройство, и/или компас могут быть расположены внутри корпуса. При этом центр тяжести корпуса с акселерометром, а также со средством электропитания и/или контроллером управления, и/или передающим устройством, и/или компасом может быть совмещен с геометрическим центром корпуса.
Также технический результат изобретения также достигается благодаря осуществлению способа определения скорости и направления ветра с помощью вышеописанного устройства, который заключается в том, что определяют данные о начальном положении корпуса относительно по меньшей мере одной из сторон света и передают указанные данные в программное обеспечение пользователя, при отклонении корпуса на подвесе от вертикальной линии определяют с помощью акселерометра величину угла отклонения корпуса от вертикальной линии и направление отклонения корпуса относительно по меньшей мере одной из сторон света, передают значения величины угла отклонения и направления отклонения корпуса на контроллер управления, с помощью которого осуществляют обработку указанных значений и передачу обработанных значений на передающее устройство, с помощью которого направляют посредством сети связи в программное обеспечение пользователя сообщения, включающие идентификационные данные устройства и обработанные значения.
Кроме того, могут использовать беспроводную сеть связи на базе BLE, или ZigBEE, или WiFi, или LPWAN, или NBIoT, или GSM, или UMTS, или LTE, или иных 2G, или 3G, или 4G, или 5G технологий.
Кроме того, могут использовать передающее устройство, выполненное в виде проводного сетевого интерфейса или шины передачи данных.
Кроме того, при определении данных о начальном положении корпуса относительно по меньшей мере одной из сторон света могут использовать механический компас.
Кроме того, при определении данных о начальном положении корпуса относительно по меньшей мере одной из сторон света могут использовать электронный компас, который соединен со средством электропитания и контроллером управления, при этом передачу данных о начальном положении в программное обеспечение осуществляют с помощью контроллера управления.
Кроме того, определение направления отклонения корпуса относительно по меньшей мере одной из сторон света могут осуществлять дополнительно с помощью электронного компаса, при этом значения направления отклонения от электронного компаса передают на контроллер управления.
Кроме того, с помощью контроллера управления и/или программного обеспечения пользователя могут осуществлять хранение полученных от акселерометра значений.
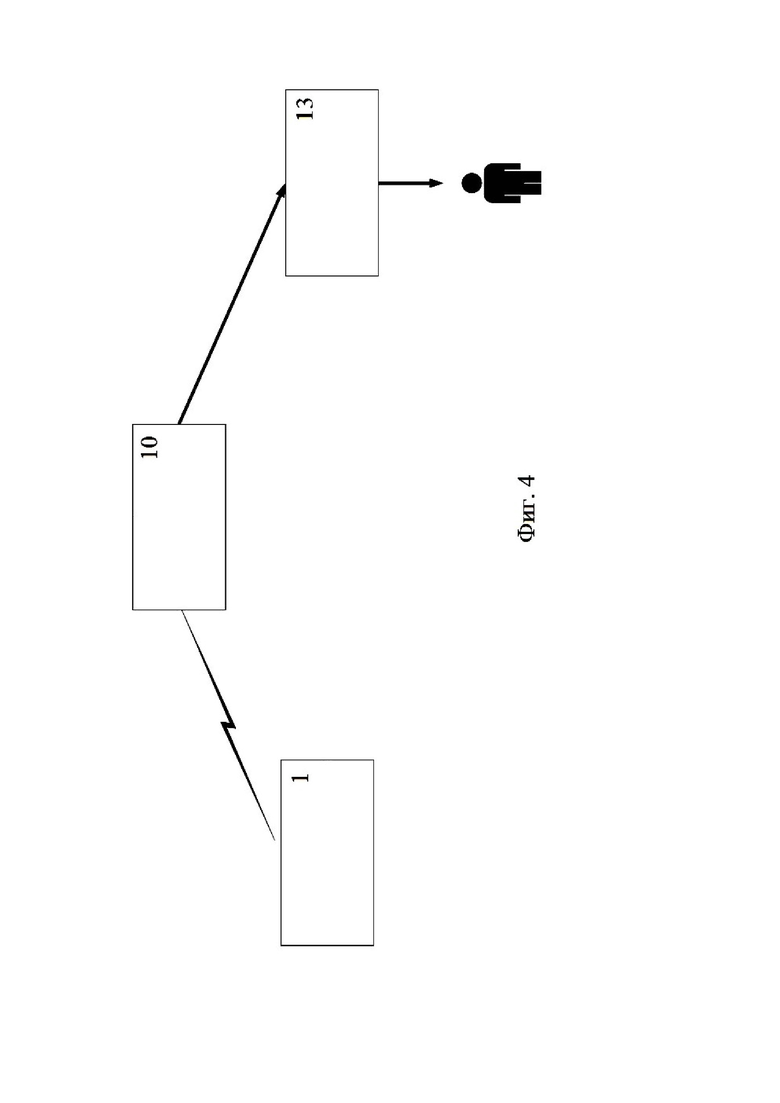
Изобретение поясняется с помощью чертежей, где на фиг. 1 показана схема предложенного устройства с размещением электронных компонентов внутри корпуса; на фиг. 2 показан вариант выполнения поверхности корпуса устройства; на фиг. 3 показан пример размещения предложенного устройства при осуществлении способа; на фиг. 4 схематично показана связь элементов, с помощью которых осуществляется предложенный способ.
Предложенное изобретение предназначено для автоматизированного дистанционного определения скорости и направления ветра в любых местах, где это необходимо осуществлять, а также на любой высоте от поверхности Земли и при любых погодных условиях.
Устройство 1 для измерения скорости и направления ветра содержит корпус 2, соединенный с гибким подвесом 3, способным обеспечить свободное раскачивание корпуса 2 при воздействии на него воздушного потока любой скорости, т.е. обеспечить отклонение корпуса 2 в направлении движения воздушного потока. Корпус 2 может иметь форму сферы или трубки (цилиндра), или конуса, или любую иную форму, близкую к кругу в горизонтальном сечении. Внутри корпуса 2 расположен акселерометр 4, который может быть выполнен на единой печатной плате (объединен в корпусе одной микросхемы), либо на различных независимых платах, либо как независимый прибор.
Предложенное устройство 1 также содержит средство 6 электропитания (источник питания, систему электропитания), контроллер 7 управления и передающее устройство 8 (радиопередатчик, контроллер связи, радиомодем, при необходимости антенна 11).
Также предложенное устройство 1 может содержать механический или электронный компас 5.
Со средством 6 электропитания соединены акселерометр 4, контроллер 7, передающее устройство 8, а также электронный компас 5 (при его наличии).
С контроллером 7 управления соединены акселерометр 4, передающее устройство 8, а также электронный компас 5 (при его наличии).
Помимо обязательного расположения внутри корпуса 2 акселерометра 4, внутри корпуса 2 могут быть также расположены и контроллер 7, и передающее устройство 8, и средство 6 электропитания, и электронный компас 5 (при его наличии). Либо возможен вариант, когда совместно с акселерометром 4 внутри корпуса 2 расположен либо только контроллер 7, либо только передающее устройство 8, либо только средство 6 электропитания, либо только электронный компас 5. Либо возможен вариант, когда внутри корпуса 2 расположено некоторое сочетание таких приборов, например, вместе с акселерометром 4 внутри корпуса 2 расположено средство 6 электропитания и контроллер 7 управления (без передающего устройства 8 и электронного компаса 5), либо контроллер 7 и передающее устройство 8 (без средства 6 электропитания и электронного компаса 5), либо средство 6 электропитания и передающее устройство 8 (без контроллера 7), либо контроллер 7 и электронный компас 5, и т.п. сочетания. При этом если средство 6 электропитания и/или контроллер 7, и/или передающее устройство 8, и/или компас 5 расположены не в корпусе 2, то они располагаются вне корпуса 2 так, чтобы обеспечить надежное соединение, связь и функционирование входящих в устройство 1 компонентов (приборов) и всего устройства 1 в целом.
При расположении внутри корпуса 2 только акселерометра 4, центр тяжести корпуса 2 с акселерометром 4 может быть совмещен с геометрическим центром корпуса 2. А при расположении внутри корпуса 2 совместно с акселерометром 4 средства 6 электропитания и/или контроллера 7 управления, и/или передающего устройства 8, и/или электронного компаса 5 (в зависимости от того, какой из перечисленных приборов или их сочетание расположены внутри корпуса 2), центр тяжести корпуса 2 совместно со всеми расположенными внутри него компонентами может быть совмещен с геометрическим центром корпуса 2. Совмещение центра тяжести корпуса 2 с входящими в корпус 2 компонентами с геометрическим центром корпуса 2 необходимо для увеличения точности измерения скорости и направления ветра. Такое совмещение позволит избежать вращения корпуса 2 вокруг вертикальной оси при воздействии воздушного потока и упростит расчет скорости по данным об отклонениях корпуса 2 на повесе 3 от вертикальной оси.
Корпус 2 может иметь гладкую поверхность, т.е. без впадин и выпуклостей. Однако, в преимущественном варианте выполнения изобретения, корпус 2 имеет впадины 9 (т.е., например, внешняя поверхность выполнена в виде мяча для гольфа) или выступы (выпуклости, бугорки), или и впадины 9 и выступы одновременно, которые служат для минимизации аэродинамических эффектов, возникающих при воздействии воздушного потока.
Установленный внутри корпуса 2 акселерометр 4 предназначен для определения скорости ветра, в том числе средней скорости ветра по среднему углу отклонения корпуса 2 на подвесе 3 от вертикальной оси (линии) за определенный период времени; а также для определения порывов ветра по максимальному углу отклонения корпуса 2 на подвесе 3 от вертикальной оси за определенный период времени.
Компас 5 предназначен для определения положения устройства 1 (корпуса 2) относительно сторон света (например, относительно севера, или юга или любой другой стороны света, или сразу относительно двух и более сторон света). Определение направления ветра и диапазона направления ветра осуществляется по данным о величине наклона корпуса 2 в процессе его отклонения под действием ветра и направлением отклонения относительно корпуса 2 (устройства 1), положение которого относительно севера известно.
Контроллер 7 управления предназначен для управления входящими в устройство 1 компонентами (приборами). Контроллер 7 способен: проводить замеры; осуществлять расчеты скорости ветра (минимальной скорости ветра за период времени, средней скорости ветра за период времени, максимальной скорости ветра за период времени) или иных требуемых данных о скорости и направлении ветра; управлять тактикой работы устройства 1; передавать полученные от акселерометра 4 и компаса 5 данные на передающее устройство 8; осуществлять иную обработку полученных от акселерометра 4 и компаса 5 данных; и пр. Контроллер 7 имеет специальное программное обеспечение, которое обеспечивает расчет значений скорости ветра по величине угла отклонения корпуса 2. Для расчета значений используются известные данные о массе корпуса 2 и его содержимого, а также о воздушном сопротивлении корпуса 2, которое зависит от его диаметра и типа поверхности. Кроме того, контроллер 7 управления имеет программное обеспечение, которое обеспечивает обработку данных, а также расчет значений направления ветра относительно корпуса 2 устройства 1 по данным о положении корпуса 2, получаемых от электронного акселерометра 4 при наклоне (отклонении от вертикальной линии) корпуса 2 под действием ветрового потока. Контроллер 7 осуществляет расчеты минимального угла (направления) на север, максимального угла (направления) на север, среднего угла (направления) на север, при наличии электронного компаса 5. Полученные данные контроллер 7 управления передает на передающее устройство 8 для последующей передачи данных в сеть 10 связи.
Передающее устройство 8 предназначено для обеспечения передачи в сеть 10 связи данных, полученных от контроллера 7. Передающее устройство 8 может иметь антенну 11, обеспечивающую беспроводную передачу данных в сеть 10 связи. Передающее устройство 8 может быть выполнено в виде проводного сетевого интерфейса или средства для подключения к шине передачи данных, при этом в случае применения проводной технологии передачи данных антенна 11 не используется. Передающее устройство 8 может быть совмещено с контроллером 7 управления, в том числе путем выполнения на единой печатной плате.
Средство 6 электропитания обеспечивает электропитание и автономную работу акселерометра 4, электронного компаса 5, контроллера 7 и передающего устройства 8. При этом средство 6 электропитания (источник питания) может быть размещен внутри корпуса 2, либо вне корпуса 2, например, в стационарной конструкции 12 или даже за ее пределами. В данном случае подвес 3 должен обеспечивать передачу электропитания к корпусу 2 (к расположенным внутри корпуса 2 компонентам). Внешнее размещение средства 6 электропитания позволяет использовать любые беспроводные способы передачи данных независимо от их энергопотребления (например, 2G, 3G, 4G, Wi-Fi и пр.). Внутреннее размещение средства 6 электропитания (внутри корпуса 2, в том числе с радиопередающим устройством 8) позволяет обеспечить беспроводную передачу данных о скорости и направлении ветра с помощью технологий низкого энергопотребления (например, BLE, LPWAN, NBIoT и пр.).
Гибкий подвес 3 предназначен для обеспечения подвеса корпуса 2 (с расположенными внутри него компонентами) с возможностью его свободного качания на конструкции 12. Гибкий подвес 3 может быть выполнен как в виде жесткого стержня с жестким креплением к корпусу 2 и свободным креплением к конструкции 12, так и в виде гибкого провода. Кроме того, по подвесу 3 может обеспечиваться как подача электропитания к акселерометру 4 и иным компонентам при их расположении внутри корпуса 2 (электронному компасу 5, контроллеру 7, передающему устройству 8), так и проводное подключение сети передачи данных (каналов связи).
Корпус 2 с акселерометром 4 и компасом 5 выполняется из легких и прочных материалов. Для минимизации налипания снега, пыли, грязи, накопления воды наружная поверхность корпуса 2 должна быть выполнена из материалов, препятствующих налипанию и накоплению, например, полиэтилена. Также при изготовлении корпуса 2 возможно применение дополнительных водо- и грязе- отталкивающих покрытий. Кроме того, корпус 2 может быть выполнен из нержавеющей стали, а также может иметь дополнительные защитные козырьки и т.п.
Таким образом, предложенное устройство 1 может быть как проводным, так и беспроводным. При беспроводном выполнении устройства 1 его компоненты (контроллер 7, передающее устройство 8, средство 6 электропитания, электронный компас 5) располагаются, преимущественно, внутри корпуса 2. При проводном выполнении устройства 1, часть его компонентов (например, средство 6 электропитания и передающее устройство 8) могут быть расположены вне корпуса 2, при этом подвес 3 обеспечивает проводное соединение с компонентами (в том числе питание), расположенными внутри корпуса 2, что является реализуемым ввиду небольшого энергопотребления приборов (датчиков).
Описанное выполнение устройства 1 позволяет с высокой точностью измерять скорость и направление ветра на любых высотах. Использование корпуса 2, подвешенного к конструкции 12 на гибком подвесе 3 позволяет с высокой точностью определять скорость и направление ветра даже при минимальной скорости ветра. А совмещение центра тяжести устройства 1 с геометрическим центром корпуса 2, и выполнение на наружной поверхности корпуса 2 впадин 9 и/или выступов позволяет исключить воздействие аэродинамических эффектов, приводящих к вращению и раскачиванию корпуса 2, что также повышает точность измерения.
Предложенный способ определения скорости и направления ветра реализуется с помощью совокупности технических средств, связанных между собой, в том числе беспроводными каналами связи и включающих в себя (но, не ограничиваясь): устройство 1 для измерения скорости и направления ветра; стационарную конструкцию 12 для подвеса устройства 1; сеть 10 связи (сеть передачи данных с оконечными устройствами (в том числе сетевыми серверами), связанными каналами связи); специальное программное обеспечение 13 пользователя (приложение пользователя, сервис), которое может быть реализовано либо на любом электронном устройстве конечного пользователя (телефон, смартфон, планшет, ноутбук, персональный компьютер или иное устройство), либо может быть реализовано на любом внешнем сервере (серверах) обработки информации (данных), причем такой сервер может быть частью программного обеспечения 13 пользователя, либо может быть реализовано на любых других средствах обработки информации.
Перед осуществлением способа устройство 1 необходимо установить (закрепить) с помощью подвеса 3 на стационарной конструкции 12 (за пределами помещения), которая обеспечит постоянное, надежное и неизменное положение устройства 1 в пространстве (относительно конкретного места, где необходимо измерить скорость и направление ветра) при любых климатических условиях, в которых осуществляется измерение. Устройство 1 устанавливают на конструкции 12 таким образом, чтобы обеспечивалось свободное движение воздушных масс или иные требования, связанные с измерением скорости и направления ветра (метеорологические наставления и правила), и так чтобы обеспечивалась связь устройства 1 с приложением 13 пользователя в соответствии с техническими условиями применяемых технологий передачи данных. В качестве технологии передачи данных могут применятся любые технологии и стандарты связи, обеспечивающее своевременную передачу данных о замеренных показателях скорости и направлении ветра. Такими технологиями могут быть проводные сети или беспроводные сети связи на базе BLE, или ZigBEE, или WiFi, или LPWAN, или NBIoT, или GSM, или UMTS, или LTE, или иные 2G, или 3G, или 4G, или 5G технологии. Причем протокол передачи данных определяется применяемой в конкретном случае технологией.
Кроме того, для реализации предложенного способа важным является размещение устройства 1 в месте со свободным движением воздушных масс и обеспечение конфигурирования сети 10 связи таким образом, чтобы обеспечивалась доставка сообщений (сигналов) от устройства 1 до программного обеспечения 13 (приложения) конечного пользователя. Для этого осуществляют настройку сети 10 связи, настройку передающего устройства 8 в соответствии с используемой технологией передачи данных. Также до начала определения параметров угла отклонения и направления отклонения корпуса 2 (положения корпуса 2 относительно вертикальной линии) могут осуществлять настройку контроллера 7 управления и программного обеспечения 13 пользователя. На данном этапе уникальные идентификаторы (идентификационные данные) устройства 1 вносятся в базу данных, которая связана с программным обеспечением 13. Настройка также осуществляется путем ассоциации программного обеспечения 13 с идентификационными данными устройства 1.
Кроме того, на этапе настройки до начала определения параметров угла отклонения с помощью акселерометра 4 определяют начальное направление вертикали вниз по направлению вектора земного притяжения при отсутствии ветра. Для дальнейших расчетов силы ветра используется значение угла отклонения вектора полного ускорения, измеряемого акселерометром 4 при наличии ветра от начального направления вертикали вниз при отсутствии ветра. Тангенс угла отклонения устройства 1 от начального положения определяет силу горизонтальной ветровой нагрузки на устройства 1 в долях силы тяжести устройства 1. Скорость ветра рассчитывается из значения ветровой нагрузки и значения ветрового сопротивления устройства 1.
Кроме того, для повышения точности измерения и расчета скорости ветра через значение ветрового сопротивления устройства 1 можно использовать калибровочную таблицу зависимости ветрового сопротивления устройства 1 (в частности корпуса 2) от скорости ветра. Также для повышения точности измерения можно использовать данные зависимости воздушного сопротивления корпуса 2 (шарика) от температуры, влажности и атмосферного давления в месте измерения.
Кроме того, для того, чтобы избежать резкого уменьшения воздушного сопротивления корпуса 2 при сильных порывах ветра, связанного с турбулентным характером движения воздушного потока, и приводящего к «полосканию» устройства 1 на ветру, необходимо ограничить диаметр корпуса 2 и сделать его поверхность более шершавой с помощью нанесения на нее специальных впадин 9 (вмятин) и/или выступов (бугорков). Например, для измерения скоростей ветра до 50 метров в секунду, диаметр корпуса 2 не должен превышать 50-60 мм.
Кроме того, в случае отсутствия электронного компаса 5, на этапе настройки до начала определения направления ветра с помощью механического компаса 5 определяют данные о начальном положении корпуса 2 относительно одной из сторон света или нескольких сторон света (например, севера, или севера и запада) и вносят такие данные в программное обеспечение 13 пользователя. А при использовании электронного компаса 5 данные о положении относительно одной из сторон света или нескольких сторон света (например, севера, или севера и запада) определяются и передаются указанные данные посредством контроллера 7 управления (и передающего устройства 8) в программное обеспечение 13 пользователя в соответствии с тактикой работы устройства 1.
После того, как устройство 1 размещено на конструкции 12, а также осуществили всю необходимую настройку, осуществляют определение скорости и направления ветра. При воздействии воздушного потока любой скорости на устройство 1 (на корпус 2), он отклоняется на подвесе 3 от вертикальной линии. В данном случае при отклонении корпуса 2 на подвесе 3 от вертикальной линии с помощью акселерометра 4 определяют параметры угла отклонения корпуса 2 относительно вертикальной линии, при этом значения угла отклонения передают на контроллер 7 управления, на котором они обрабатываются. При этом обработка значений величины угла отклонения осуществляется, например, путем вычисления тангенса угла отклонения от вертикальной линии. Также одновременно с вычислением тангенса угла отклонения на контроллере 7 могут осуществлять расчет значения скорости ветра с учетом тангенса угла отклонения. В вариантном исполнении изобретения на контроллере 7 могут осуществлять обработку только путем вычисления тангенса угла отклонения корпуса 2 от вертикальной линии, а сам расчет значения скорости ветра осуществляют в программном обеспечении пользователя с использованием калибровочной таблицы и/или калибровочной формулы (после отправки контроллером 7 управления через передающее устройство 8 вычисленного тангенса угла отклонения в программное обеспечение 13 пользователя).
Кроме того, одновременно с измерением скорости ветра при отклонении корпуса 2 от вертикальной линии (при воздействии воздушного потока любой скорости на устройство 1) с помощью акселерометра 4 (в том числе при учете значений, определяемых компасом 5) определяют направление отклонения корпуса 2 от вертикальной линии при его отклонении под действием воздушного потока. При этом значения отклонений корпуса 2 от акселерометра 4 (и при необходимости от электронного компаса 5) передают на контроллер 7 управления, на котором они обрабатываются и осуществляется расчет значения направления ветра.
После того, как контроллер 7 осуществил обработку данных (в том числе расчет значения скорости и направления ветра в заданный период времени, если расчет осуществляется непосредственно с помощью программного обеспечения контроллера 7), с помощью контроллера 7 управления передают обработанные значения (рассчитанные значения) на передающее устройство 8. Далее с помощью передающего устройства 8 направляют посредством сети 10 связи в программное обеспечение 13 пользователя сообщения, которые включают идентификационные данные устройства 1 и обработанные значения и/или сразу рассчитанные значения скорости и направления ветра (данные о скорости и направлении ветра в конкретное время или за определенный промежуток времени). При этом предложенный способ не накладывает ограничений на технологию доставки сообщений в программное обеспечение 13 (приложение) пользователя.
Все обработанные и рассчитанные контроллером 7 значения скорости и направления ветра (полученные от акселерометра 4 и компаса 5), и/или значения вычисленного тангенса угла отклонения могут быть сохранены с помощью контроллера 7 управления, а также с помощью программного обеспечения 13 пользователя.
При получении программным обеспечением 13 пользователя из сети 10 связи сообщений (сигналов) от устройства 1, осуществляются сопоставление идентификационных данных устройства 1 с местом, на котором установлено устройство 1. В случае, если в программное обеспечение поступили обработанные значения без проведенных точных расчетов скорости и направления ветра, то в программное обеспечение 13 осуществляет такой расчет с использованием обработанных контроллером 7 данных, полученных от акселерометра 4 и электронного компаса 5 (при его наличии). Также осуществляют уведомление (информирование) пользователя о скорости и направлении ветра в конкретное время или в определенный промежуток времени. Информирование пользователя может быть осуществлено путем отправки ему сообщений (например, через определенные периоды времени, настраиваемые пользователем), включающих идентификационные данные устройства 1 и измеренные значения скорости и направления ветра. При необходимости в случае резкого усиления скорости ветра или резкой смене его направления, пользователя могут немедленно уведомлять об этом путем отправки ему сообщений и путем воспроизведения определенного сигнала на его электронном устройстве. Такие сигналы (сообщения) могут отправляться немедленно при соответствующей настройке устройства 1 и программного обеспечения 13 пользователя. Также, в случае, если пользователь желает узнать скорость и направление ветра в конкретное заданное время, то благодаря организации связи устройства 1 и программного обеспечения 13 пользователя, а также благодаря соответствующей настройке программного обеспечения 13, пользователя уведомляют его. Метод информирования (уведомления) пользователя может быть любым.
В процессе осуществления предложенного способа при отсутствии ветра устройство 1 может осуществлять автоматическую калибровку положения корпуса относительно вертикальной линии.
Благодаря осуществлению предложенного способа обеспечивается высокоточное непрерывное определение скорости и направления ветра в любом месте, а также любых климатических условиях. Организация связи устройства 1 с программным обеспечением 13 пользователя позволяет в режиме реального времени оперативно дистанционно определять скорость и направление ветра в любых местах, где это необходимо осуществлять, и где установлено устройство 1. Возможность хранения данных, полученных от акселерометра 4 и компаса 5, позволяет в любое время узнать какая скорость и какое направление ветра были в месте установки устройства 1 в конкретное время (вплоть до секунд) или за определенный промежуток времени.
Применение предложенного устройства 1 и организация связи устройства 1 с программным обеспечением пользователя позволяют повысить надежность осуществления способа без перебоев в получении данных. Кроме того, обеспечивается простота конструкции устройства 1 и простота осуществления способа, низкая стоимость, надежность работы устройства 1. Отсутствует необходимость начального ориентирования устройства 1 по сторонам света. Обеспечивается возможность применения проводных и беспроводных каналов связи для сбора данных с устройства 1.
Ограничения на минимальную и максимальную измеряемую скорость ветра определяются соотношением размеров корпуса 2 (сферы) и ее массы (совместно с расположенными в корпусе 2 компонентами). Таким образом, имеется возможность исполнения устройства 1 любых размеров и массы для измерения любых адекватных скоростей ветра.
Кроме того, использование устройства 1 и реализация предложенного способа с помощью устройства 1 обеспечивают:
- удаленное автоматизированное измерение скорости ветра, порывов ветра и его направления в одном устройстве 1;
- отсутствие движущихся механических частей, что существенно увеличивает надежность способа и минимизирует необходимость в обслуживании устройства 1;
- отсутствие существенных ограничений на способ и место крепежа устройства 1;
- низкую стоимость устройства 1 и совокупную стоимость владения системой за счет долгого срока работы устройства 1 и отсутствия необходимости его обслуживания;
- существенное расширение функциональных возможностей способа за счет возможности настройки устройства 1 и программного обеспечения 13 пользователя таким образом, чтобы осуществлялось информирование пользователя о скорости и направлении ветра в любое время, в любой промежуток времени, а также за любые прошлые периоды определения скорости и направления ветра.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЕТРА В СУДОВЫХ УСЛОВИЯХ | 2023 |
|
RU2798154C1 |
| УКАЗАНИЕ ПАРАМЕТРОВ ВЕТРА | 2013 |
|
RU2571439C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСРЕДНЕННЫХ ЗНАЧЕНИЙ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2015 |
|
RU2600519C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2744772C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСРЕДНЕННЫХ ЗНАЧЕНИЙ ГОРИЗОНТАЛЬНОЙ И ВЕРТИКАЛЬНОЙ СОСТАВЛЯЮЩИХ СКОРОСТИ ВЕТРА И ЕГО НАПРАВЛЕНИЯ | 2016 |
|
RU2616352C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСРЕДНЕННЫХ ЗНАЧЕНИЙ ГОРИЗОНТАЛЬНОЙ И ВЕРТИКАЛЬНОЙ СОСТАВЛЯЮЩИХ СКОРОСТИ ВЕТРА И ЕГО НАПРАВЛЕНИЯ | 2016 |
|
RU2650094C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНЫХ РАСПРЕДЕЛЕНИЙ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2018 |
|
RU2692736C1 |
| АВТОНОМНОЕ УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ СКОРОСТИ И НАПРАВЛЕНИЯ ТЕЧЕНИЯ ЖИДКОСТИ И ГАЗА | 2012 |
|
RU2503962C1 |
| Способ определения усредненного вектора скорости ветра | 2016 |
|
RU2617020C1 |
| Самовсплывающая портативная донная сейсмическая станция без оставления груза на дне моря | 2022 |
|
RU2796944C1 |


Изобретение относится к области метеорологии и может быть использовано для оперативного дистанционного измерения скорости и направления ветра. Сущность: устройство (1) для измерения скорости и направления ветра содержит корпус (2), снабженный гибким подвесом, средство электропитания (6), контроллер (7) управления, передающее устройство (8) и акселерометр (4). Акселерометр (4) расположен внутри корпуса (2). Центр тяжести корпуса (2) с акселерометром (4) совмещен с геометрическим центром корпуса. Технический результат: обеспечение возможности высокоточного определения скорости и направления ветра при любых скоростях воздушных потоков, в любых местах и на любой высоте относительно земной поверхности, повышение надежности дистанционного определения скорости и направления ветра. 2 н. и 10 з.п. ф-лы, 4 ил.
1. Устройство для измерения скорости и направления ветра, содержащее корпус, соединенный с гибким подвесом, средство электропитания и соединенные со средством электропитания контроллер управления, передающее устройство и акселерометр, причем передающее устройство и акселерометр соединены с контроллером управления, акселерометр расположен внутри корпуса, а центр тяжести корпуса с акселерометром совмещен с геометрическим центром корпуса.
2. Устройство по п. 1, в котором корпус имеет сферическую поверхность с впадинами и/или выступами.
3. Устройство по п. 1, в котором оно дополнительно содержит компас.
4. Устройство по п. 3, в котором средство электропитания и/или контроллер управления, и/или передающее устройство, и/или компас расположены внутри корпуса.
5. Устройство по п. 4, в котором центр тяжести корпуса с акселерометром, а также со средством электропитания и/или контроллером управления, и/или передающим устройством, и/или компасом совмещен с геометрическим центром корпуса.
6. Способ определения скорости и направления ветра с помощью устройства, выполненного по любому из пп. 1-5, заключающийся в том, что определяют данные о начальном положении корпуса относительно по меньшей мере одной из сторон света и передают указанные данные в программное обеспечение пользователя, при отклонении корпуса на подвесе от вертикальной линии определяют с помощью акселерометра величину угла отклонения корпуса от вертикальной линии и направление отклонения корпуса относительно по меньшей мере одной из сторон света, передают значения величины угла отклонения и направления отклонения корпуса на контроллер управления, с помощью которого осуществляют обработку указанных значений и передачу обработанных значений на передающее устройство, с помощью которого направляют посредством сети связи в программное обеспечение пользователя сообщения, включающие идентификационные данные устройства и обработанные значения.
7. Способ по п. 6, в котором используют беспроводную сеть связи на базе BLE, или ZigBEE, или WiFi, или LPWAN, или NBIoT, или GSM, или UMTS, или LTE, или иных 2G, или 3G, или 4G, или 5G технологий.
8. Способ по п. 6, в котором используют передающее устройство, выполненное в виде проводного сетевого интерфейса или шины передачи данных.
9. Способ по п. 6, в котором при определении данных о начальном положении корпуса относительно по меньшей мере одной из сторон света используют механический компас.
10. Способ по п. 6, в котором при определении данных о начальном положении корпуса относительно по меньшей мере одной из сторон света используют электронный компас, который соединен со средством электропитания и контроллером управления, при этом передачу данных о начальном положении в программное обеспечение осуществляют с помощью контроллера управления.
11. Способ по п. 6, в котором определение направления отклонения корпуса относительно по меньшей мере одной из сторон света осуществляют дополнительно с помощью электронного компаса, при этом значения направления отклонения от электронного компаса передают на контроллер управления.
12. Способ по любому из пп. 10, 11, в котором с помощью контроллера управления и/или программного обеспечения пользователя осуществляют хранение полученных от акселерометра значений.
| ПУТЕИЗМЕРИТЕЛЬНАЯ СЛЕДЯЩАЯ СИСТЕМА | 2014 |
|
RU2603452C2 |
| УКАЗАНИЕ ПАРАМЕТРОВ ВЕТРА | 2013 |
|
RU2571439C1 |
| WO 2020168189 А3, 20.08.2020. | |||

