Способ определения вертикальных распределений скорости и направления ветра относится к метеорологии и предназначен для измерения вертикальных распределений метеорологических параметров атмосферы.
Известны способы и устройства для определения скорости и направления ветра шаров-зондов или радиозондов. (Патент на изобретение РФ №2101736, МПК G01W 1/02, 01.10.1998, патенты на полезные модели №103195, МПК G01W 1/08, 01.12.2010, №92204, МПК G01W 1/02, 10.03.2010). Недостатком таких технических решений является невозможность проведения измерений в заранее выбранных географических координатах вследствие неуправляемости зонда.
Известен способ, описанный в устройстве для определения скорости и направления ветра на заданной высоте. Способ заключается в запуске зонда в интересующую область пространства на заданную высоту с помощью специальных средств, обеспечение движения зонда в горизонтальном направлении по ветру и регистрацию скорости и направления ветра с помощью специальных средств. Зонд снабжен системой спутниковой навигации, электронным гироскопом, электронным магнитным компасом. (Патент РФ 98256, МПК G01W 1/00, 27.04.2010). Недостатком такого технического решения также является невозможность проведения измерений в заранее выбранных географических координатах вследствие неуправляемости зонда.
Известен способ измерения вертикального распределения скорости и направления ветра анемометрами, расположенными на различных высотах на метеорологической мачте на высотах до нескольких сот метров. Однако, такие измерения могут быть выполнены далеко не везде, а только в местах, где такие мачты установлены.
Наиболее близким является способ с использованием беспилотного летательного аппарата (РФ № 2617020 МПК G01W 1/08), 19.04.2017), выбранный в качестве прототипа. Способ заключается в запуске беспилотного летательного аппарата (БПЛА) мультироторного типа в заранее выбранную точку с заданными географическими координатами, переводе БПЛА в режим удержания координат, равномерного движения по вертикали и, используя заранее измеренную эмпирическую зависимость, по наклону вектора тяги БПЛА, потребляемой двигателями мощности, атмосферному давлению, температуре и влажности воздуха определяют направление и скорость ветра в выбранной точке либо в вертикальном разрезе. Недостатком данного способа является его инерционность и большие погрешности измерений, связанные с тем, что в режиме удержания координат при меняющемся ветре время стабилизации аппарата может составлять несколько секунд, что при равномерном движении по вертикали может привести к ошибке измерений. Кроме того, угол наклона летательного аппарата в процессе его стабилизации по мере достижения требуемых географических координат не является постоянным, а изменяется, что может привести к дополнительным погрешностям.
Целью предлагаемого изобретения является повышение быстродействия системы измерений на базе БПЛА и повышения точности измерения скорости и направления ветра. Эта цель достигается тем, что одновременно с измерением наклона вектора тяги, потребляемой двигателями мощности, атмосферного давления, температуры и влажности воздуха, измеряют дифференциальные давления между N (по крайней мере, между двумя) парами точек в области за пределами зоны, возмущенной пропеллерами летательного аппарата во время его движения, а скорость и направление ветра вычисляют по заранее определенной при калибровке зависимости между вектором скорости ветра V и дифференциальными давлениями (ΔР1, ΔР3,…, ΔPN), измеренных в точках за пределами зоны, возмущенной пропеллерами летательного аппарата, с учетом наклона вектора тяги (α), атмосферного давления (Р), влажности (ψ) и температуры (Т), потребляемой двигателями мощности (W) и ориентации БПЛА (φ):
V = f(α, φ, P, ψ, T, W, ΔР1, ΔP3,…,ΔPN).
Способ осуществляется следующим образом.
1. БПЛА, способный зависать в воздухе, имеющий спутниковую систему навигации, гироскоп, магнитный компас, датчики потребляемой двигателями суммарной мощности, атмосферного давления, влажности и температуры, оснащают, по крайней мере, четырьмя измерительными трубками, выставленными за пределы зоны возмущенной пропеллерами летательного аппарата по двум не параллельным (в частности взаимно перпендикулярным) направлениям, К другим концам трубок подсоединяют дифференциальные датчики давления, причем один дифференциальный датчик давления подключался к трубкам, расположенным параллельно в противоположных направлениях (Фиг. 1).
Беспилотный летательный аппарат с установленными на нем датчиками, помещают в аэродинамическую трубу и определяют зависимость между наклоном БПЛА а, вектором скорости ветра V, углом поворота корпуса БПЛА φ, атмосферным давлением Р, влажностью ψ, температурой Т и суммарной мощностью W, развиваемой двигателями БПЛА в виде:
V = f(α, φ, P, ψ, T, W, ΔР1, ΔР2,…,ΔPN).
2. Запускают БПЛА в интересующую область пространства.
3. Переводят БПЛА в режим удержания географических координат и ориентации и равномерного движения по вертикали. Начинают фиксацию показаний бортовых навигационных приборов и датчиков.
4. Используя заранее измеренную при калибровке системы зависимость наклона вектора скорости БПЛА, давления, влажности, температуры и дифференциальных давлений от скорости и направления ветра определяют направление и величину трехмерного вектора скорости ветра в каждой точке траектории движения БПЛА.
5. Исходные данные передают на наземную станцию управления по радиоканалу или (и) записывают на регистрирующее устройство на борту БПЛА.
Основными параметрами, по которым вычисляются скорость и направление ветра, являются дифференциальные давления в точках за пределами зоны, возмущенной пропеллерами летательного аппарата. Так как давление, создаваемое набегающим потоком воздуха, обусловленным соответствующей компонентой вектора скорости ветра, пропорционально квадрату скорости составляющей потока, перпендикулярной торцам измерительных трубок, точность измерений возрастает с возрастанием скорости потока. Быстродействие имеющихся в продаже абсолютных и дифференциальных датчиков давления составляет 1 миллисекунду. Данные измерений навигационных параметров (в частности, углов наклона летательного аппарата относительно горизонтали) определяются с частотой 5-10 Гц.
Таким образом, в данном техническом решении благодаря новой взаимосвязи известных и новых действий над материальными средствами получен неожиданный технический результат, а именно, измерение дифференциальных давлений стандартными датчиками в точках за пределами зоны, возмущенной пропеллерами летательного аппарата в процессе их работы и математический учет этих величин позволяет повысить точность определения скорости и направления ветра. Причем одновременное проведение измерений в горизонтальной плоскости относительно поверхности Земли в совокупности с вертикальной траекторией полета летательного аппарата позволяет расширить функциональные возможности способа - получить данные о вертикальном распределении параметров ветра.
Пример конкретного выполнения
Для измерения скорости и направления ветра был использован специально разработанный летательный аппарат вертолетного типа с четырьмя несущими винтами, расположенными в вершинах квадрата со стороной 0,45 м. Вес аппарата составляет 0,85 кг. Аппарат был оснащен системой автопилотирования, позволяющей осуществлять полет в автоматическом режиме. В состав бортовой системы автопилотирования входят GPS модуль, гироскоп и компас (не показаны). Высота полета 1500 м.
Управление летательным аппаратом заключалось только в подаче команды на взлет, дальнейший полет, а также возвращение аппарата в точку вылета и его приземления происходили в автоматическом режиме без участия оператора. Программа, по которой происходил полет, состояла в подъеме аппарата вертикально вверх на заданную высоту с заданной постоянной скоростью подъема, спуск с заданной скоростью и приземление в точку вылета. Общая схема системы для осуществления способа определения скорости и направления ветра на летательном аппарате приведена на Фиг. 1.
Для измерения скорости ветра по направлениям диагоналей квадрокоптера были установлены измерительные трубки диаметром 2 мм, причем концы трубок выходили за пределы зоны возмущения воздуха, создаваемого несущими винтами. К другим концам трубок были подсоединены дифференциальные датчики давления, причем один датчик давления подключался к трубкам, расположенным параллельно в противоположных направлениях. Схема расположения измерительных трубок 1, 2, 3 и 4 и дифференциальных датчиков давления D1 и D2 приведены на Фиг. 1.
Летательный аппарат в режиме автопилотирования поднимался вертикально вверх, при этом он был сориентирован таким образом, что одна из измерительных трубок была направлена строго на север.
Одновременно измерялось абсолютное давление воздуха с помощью датчика давления, установленного на борту летательного аппарата.
Таким образом, на борту летательного аппарата измерялись два дифференциальных давления ΔP1 (разность давлений между точками 1 и 2, измеряемое дифференциальным датчиком давления D1)) и ΔР2 (разность давлений между точками 3 и 4, измеряемое дифференциальным датчиком давления D2) в двух взаимно перпендикулярных направлениях и абсолютное давление воздуха Р. Данные измерений записывались на карту памяти на борту летательного аппарата.
Определение скорости и направления ветра из показаний датчиков осуществлялось по измерению давления набегающего потока, создаваемого компонентами вектора скорости перпендикулярным соответствующим торцам измерительных трубок  с использованием формулы:
с использованием формулы:

По значениям измеренных дифференциальных давлений ΔP1 и ΔР2 и вычисленных с использованием формулы (1) составляющих скорости ветра Vsinα и Vcosα (см. Фиг. 1) с учетом наклона вектора тяги, потребляемой двигателями мощности и ориентации БПЛА, атмосферного давления, влажности и температуры.
Плотность воздуха ρ может быть определена из результатов измерения метеопараметров по формуле:
ρ = F(M, Р, Т, R, ψ), где М -молекулярный вес воздуха, Р - абсолютное давление воздуха, Т - абсолютная температура, R - универсальная газовая постоянная, ψ - относительная влажность воздуха. В случае сухого воздуха  .
.
Таким образом, используя формулу (1) по разности давлений между точками 1, 2 и 3, 4 определяются компоненты скорости ветра, по которым с учетом наклона вектора тяги, потребляемой двигателями мощности и ориентации БПЛА вычисляются скорость и направление ветра.
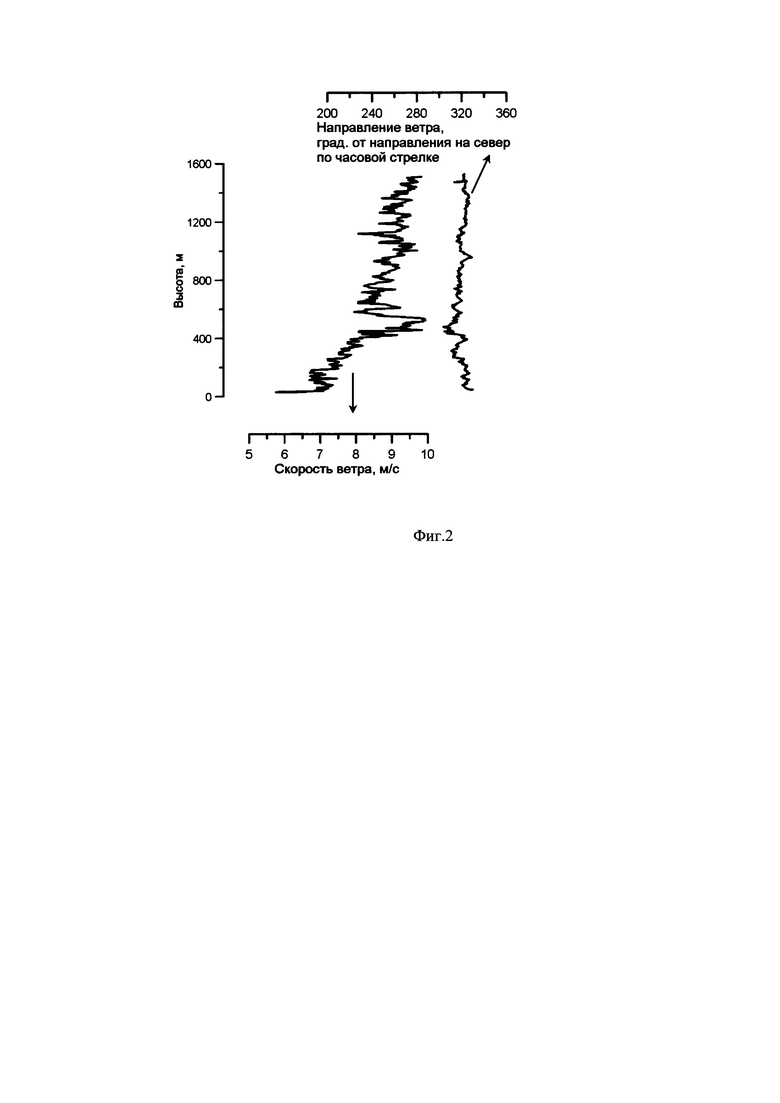
Скорость подъема летательного аппарата составляла 4,5 м/с. Постоянная времени при измерениях составляла 1 секунду. Угол направления ветра отсчитывался от направления на север по часовой стрелке (азимут ветра).
Графики измеренной зависимости скорости и направления ветра от высоты, полученные в процессе полевых испытаний, приведены на Фиг. 2.
Выводы
Способ определения вертикального распределения скорости и направления ветра, осуществляемый предлагаемым способом с помощью измерения дифференциальных давлений выбранного расположения датчиков дифференциальных давлений на летательном аппарате с вертикальной траекторией полета, с учетом наклона вектора тяги, атмосферного давления, влажности и температуры, потребляемой двигателями мощности и ориентации БПЛА, а также с применением приведенных выше математических уравнений позволит повысить возможности измерения пространственного распределения скорости ветра по высоте и повысить точность измерения вертикального распределения скорости ветра в исследуемой зоне нижних слоев земной атмосферы. При этом новые технические характеристики данного технического решения позволят применять данный способ для оперативного метеорологического обеспечения безопасности полетов летательных аппаратов, эксплуатации объектов космической инфраструктуры, зонах чрезвычайных ситуаций, а также для метеообеспечения войск. Он также может быть использован в труднодоступных географических регионах Земли.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ РАСПРЕДЕЛЕНИЙ ПАРАМЕТРОВ АТМОСФЕРЫ | 2014 |
|
RU2590229C2 |
| Способ определения усредненного вектора скорости ветра с помощью беспилотного летательного аппарата | 2016 |
|
RU2632270C1 |
| Способ определения усредненного вектора скорости ветра | 2016 |
|
RU2617020C1 |
| Способ определения усредненного вектора скорости ветра с помощью беспилотного летательного аппарата | 2018 |
|
RU2695698C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2744772C1 |
| Система и способ натурных измерений нестационарного ветрового воздействия на здание | 2024 |
|
RU2839555C1 |
| Способ определения усредненных значений метеорологических параметров в пограничном слое атмосферы | 2019 |
|
RU2727315C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСРЕДНЕННЫХ ЗНАЧЕНИЙ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2015 |
|
RU2600519C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИНАМИКИ АТМОСФЕРЫ В ПРИЗЕМНОМ СЛОЕ | 2013 |
|
RU2548299C2 |
| Способ измерения уровня радионаблюдаемости и устройство для его реализации | 2020 |
|
RU2750133C1 |

Изобретение относится к области метеорологии и может быть использовано для определения вертикальных распределений скорости и направления ветра. Сущность: вертикально вверх запускают беспилотный летательный аппарат (БПЛА) вертолетного (мультироторного) типа в режиме удержания географических координат и ориентации, снабженный датчиками наклона, температуры, давления, влажности и потребляемой двигателями мощности. Измеряют наклон вектора тяги БПЛА, потребляемую двигателями мощность, атмосферное давление, температуру и влажность воздуха, а также дифференциальное давление между не менее чем двумя парами точек за пределами зоны, возмущенной пропеллерами летательного аппарата. Определяют скорость и направление ветра, используя заранее выявленную при калибровке зависимость дифференциальных давлений от вектора скорости ветра с учетом наклона вектора тяги, потребляемой двигателями мощности, ориентации БПЛА, атмосферного давления, влажности и температуры. Технический результат: повышение точности определения вертикальных распределений скорости и направления ветра, расширение функциональных возможностей. 2 ил.
Способ определения вертикальных распределений скорости и направления ветра, состоящий в том, что вертикально вверх запускают беспилотный летательный аппарат (БПЛА) вертолетного (мультироторного) типа в режиме удержания географических координат и ориентации, снабженный датчиками наклона, температуры, давления, влажности и потребляемой двигателями мощности, измеряют наклон вектора тяги БПЛА, потребляемую двигателями мощность, атмосферное давление, температуру и влажность воздуха, отличающийся тем, что дополнительно измеряют дифференциальное давление между N (по крайней мере между двумя) парами точек за пределами зоны, возмущенной пропеллерами летательного аппарата, а определение скорости и направления ветра производят, используя заранее измеренную при калибровке системы зависимость дифференциальных давлений от вектора скорости ветра с учетом наклона вектора тяги, потребляемой двигателями мощности и ориентации БПЛА, атмосферного давления, влажности и температуры.
| Способ определения усредненного вектора скорости ветра | 2016 |
|
RU2617020C1 |
| Способ определения усредненного вектора скорости ветра с помощью беспилотного летательного аппарата | 2016 |
|
RU2632270C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСРЕДНЕННЫХ ЗНАЧЕНИЙ ГОРИЗОНТАЛЬНОЙ И ВЕРТИКАЛЬНОЙ СОСТАВЛЯЮЩИХ СКОРОСТИ ВЕТРА И ЕГО НАПРАВЛЕНИЯ | 2016 |
|
RU2616352C1 |

