Область техники
Настоящее изобретение относится к области измерения цвета.
В частности, настоящее изобретение относится к способу спектрометрии для измерения цвета объекта с использованием электронного устройства и к соответствующему устройству.
Уровень техники
Цвет является световым потоком, воспринимаемым человеческим глазом. Речь идет о спектральном распределении энергии С(λ) в диапазоне длин волн, при этом в данном случае λ меняется от 380 до 780 нм для видимой области (наблюдатель по стандарту CIE 1931). В дальнейшем функция, описывающая это спектральное распределение энергии, будет обозначаться буквой и знаком λ в скобках.
С учетом аддитивного синтеза любой цвет можно выразить трихроматическими координатами по трем первичным цветам. Существует несколько систем первичных цветов, из которых в дальнейшем мы остановимся на двух стандартных, которыми являются пространство CIE XYZ (и его версия CIE Yxy с плоскостью хроматичности постоянной яркости) и пространство CIE L*a*b, которое позволяет оценивать цветовое отличие при помощи эвклидовой нормы «дельта Е», характеризующей зрительно воспринимаемые цветовые отличия. «Гамут» (пределы) этих двух пространств охватывает всю видимую область. Мы будет также ссылаться на трихроматическое пространство sRGB, соответствующее базовому гамуту всех современных электронных устройств. Гамут пространства sRGB не охватывает всей видимой области, в частности, в диапазоне синих-зеленых цветов.
Цвет объекта получается в результате взаимодействий между падающим световым потоком и поверхностью указанного объекта. Для придания материалу присущего ему внешнего вида действуют три феномена: поглощение, зеркальное отражение и диффузное отражение. Зеркальное отражение происходит на поверхности объекта. Свет мало взаимодействует с материалом объекта и, в частности, с его пигментами. Следовательно, цвет отраженного света является близким к принимаемому свету, но отраженная энергия концентрируется в секторе, центрованном в теоретическом направлении, определяемом законами Снеллиуса-Декарта. Диффузное отражение, наоборот, происходит больше по глубине. Излучаемый свет окрашивается в цвет пигментов, и отраженная энергия не зависит от направления наблюдения. Иначе говоря, зеркальное отражение является блестящей составляющей поверхности, а диффузное отражение является матовой и окрашенной составляющей поверхности.
Следовательно, цвет объекта зависит от двух независимых факторов: от освещения объекта и от природы поверхности объекта. Последний фактор характеризуется функцией «способности двунаправленного спектрального отражения». Ее определяют как соотношение между яркостью, отражаемой поверхностью, и ее освещенностью. Значение этой функции зависит от длины волны λ, от направления падающего света и от направления наблюдения. Однородная диффузная отражательная способность объекта RОБ(λ), соответствующая диффузному отражению, зависит только от длины волны λ. Именно она дает информацию о цвете в хроматическом смысле, исключая феномен яркости.
Поэтому цвет объекта можно характеризовать 1) отраженным светом при данном осветителе (например, трихроматические координаты CIE L*a*b с источником света D50 в темной комнате) или, предпочтительно, 2) его спектральной отражательной способностью RОБ(λ). Первый метод требует применения относительно простых устройств (каталоги цветов, трехцветные колориметры), но с большим риском метамерии (этот метод не отличается высокой точностью). Как правило, его применение ограничивается отслеживанием колебаний по отношению к эталонному цвету в ходе процесса изготовления (полиграфия, текстильное производство, живопись и т.д.). Второй метод требует наличия более сложных устройств (среди которых дифракционный спектрометр, двойной параллельный спектрометр); он не подвержен метамерии (этот метод является очень точным) и позволяет моделировать восприятие цвета при разных источниках света (внутренний, внешний). Он предназначен для опытных профессионалов и для конструкторско-проектировочной деятельности.
Все эти устройства не совместимы с мобильным и не запланированным использованием при помощи мобильного телефона или электронного планшета, которые можно использовать повсеместно. Их использование является относительно сложным, не говоря уже об их более высокой стоимости.
Что же касается приложений для измерения цвета, присутствующих в настоящее время на мобильных телефонах или планшетах (iOS, Android …), то они не требуют специального дополнительного оборудования, но эти приложения не обеспечивают надежного измерения цветов. Действительно, они основаны только на использовании датчика цветного изображения в составе прибора (решетка трехцветных фотодетекторов, матрица Байера «красный-зеленый-синий») с программой вычисления баланса белого. Их восприятие цветов объектов искажается непредсказуемой вариативностью окружающего освещения.
Из уровня техники известны эмиссионный спектрометр на дифракционной решетке и способ определения функции спектральной отражательной способности объекта: устройство производит эталонированный белый свет S(λ) в направлении мишени, при этом свет отражается от объекта, затем проходит через призму, где он преломляется и попадает в несколько десятков фотодетекторов (по одному на субспектр), которые позволяют интерполировать Е(λ), откуда RОБ(λ)=E(λ)/S(λ). Измерение цвета объекта при помощи этого известного способа осуществляют со специально разработанным корпусом и с использованием каше для маскирования любого неизвестного внешнего осветителя. Кроме того, спектрометр этого типа не позволяет осуществлять спектрометрическое фотографирование.
Из американского патента № US 5963333 известны светодиодный спектрометр с установленными параллельно двойными фотоприемниками, спектрометрический детекторный блок и способ определения функции спектральной отражательной способности объекта. Измерение цвета объекта при помощи этого известного способа осуществляют со специально разработанным корпусом и с использованием каше для маскирования любого неизвестного внешнего осветителя. Кроме того, спектрометр этого типа не позволяет осуществлять спектрометрическое фотографирование.
Из патентной заявки РСТ № WO 2004/079314 известны также колориметр, колориметрический детекторный блок и способ определения цвета объекта с вычислением отклонения относительно эталонного цвета. Измерение цвета объекта при помощи этого известного способа осуществляют со специально разработанным корпусом и с использованием каше для маскирования любого неизвестного внешнего осветителя, и способ не позволяет измерять собственно функцию спектральной отражательной способности.
Из британской патентной заявки № GB 2474701 A известны также колориметр, колориметрический детекторный блок и способ определения цвета объекта с вычислением отклонения относительно эталонного цвета. Измерение цвета с применением этого известного способа осуществляют при помощи телефона, оснащенного экраном для излучения цветных вспышек и фотоаппаратом на противоположной стороне. Измерение цвета с применением этого известного способа осуществляют при помощи специально разработанных волноводов (наборы зеркал, оптические волокна и т.д.), при этом способ требует использования каше или волноводов для маскирования любого неизвестного внешнего источника света и не позволяет измерять собственно функцию спектральной отражательной способности.
Раскрытие изобретения
Настоящее изобретение призвано устранить недостатки известных технических решений и предложить способ спектрометрического измерения цвета объекта с использованием в качестве излучателя средства, выполненного с возможностью излучения цветных осветителей, и в качестве приемника - электронного датчика цветного изображения, расположенных рядом друг с другом, в присутствии или в отсутствие неизвестного внешнего осветителя (но постоянного при всех вспышках).
По своему принципу изобретение работает противоположно эмиссионному спектрометру на дифракционной решетке: вместо генерирования одного эталонированного осветителя и его анализа с помощью нескольких десятков фотодетекторов, заявленное устройство генерирует несколько десятков эталонированных осветителей и анализирует их только с помощью трех фотодетекторов.
В связи с этим объектом настоящего изобретения является способ измерения однородной диффузной отражательной способности RОБ(λ), по меньшей мере, в одной точке объекта при помощи устройства, содержащего средство, выполненное с возможностью излучения цветных осветителей в виде световых потоков, и электронный датчик цветных изображений, отличающийся тем, что содержит следующие этапы:
 указанный объект помещают в зону, находящуюся напротив и по существу перпендикулярно к указанному средству, выполненному с возможностью излучения цветных осветителей в виде световых потоков и находящемуся в поле видимости указанного электронного датчика цветных изображений, при этом указанный объект освещается также внешним осветителем в виде неизвестного и постоянного окружающего внешнего светового потока Iвнеш(λ), где λ обозначает длину волны, при помощи указанного средства излучают последовательность из N осветителей Sисточник(λ)i (где N является натуральным целым числом больше единицы, i меняется от 1 до N, и λ является длиной волны), при этом Sисточник(λ)i известен в зависимости от входных параметров указанного средства, выполненного с возможностью излучения цветных световых потоков, при этом указанный электронный датчик цветных изображений принимает световой поток, отраженный, по меньшей мере, в одной точке указанного объекта и входящий в датчик, при этом указанный световой поток обозначают Едатчик(λ)i, где N является натуральным целым числом, строго превышающим два, i меняется от 1 до N, и λ является длиной волны, и получают N уравнений «Ei»: Едатчик(λ)i=RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i) с учетом аддитивного характера волнообразного света и по определению однородной диффузной отражательной способности RОБ(λ), по меньшей мере, в одной точке объекта; и
указанный объект помещают в зону, находящуюся напротив и по существу перпендикулярно к указанному средству, выполненному с возможностью излучения цветных осветителей в виде световых потоков и находящемуся в поле видимости указанного электронного датчика цветных изображений, при этом указанный объект освещается также внешним осветителем в виде неизвестного и постоянного окружающего внешнего светового потока Iвнеш(λ), где λ обозначает длину волны, при помощи указанного средства излучают последовательность из N осветителей Sисточник(λ)i (где N является натуральным целым числом больше единицы, i меняется от 1 до N, и λ является длиной волны), при этом Sисточник(λ)i известен в зависимости от входных параметров указанного средства, выполненного с возможностью излучения цветных световых потоков, при этом указанный электронный датчик цветных изображений принимает световой поток, отраженный, по меньшей мере, в одной точке указанного объекта и входящий в датчик, при этом указанный световой поток обозначают Едатчик(λ)i, где N является натуральным целым числом, строго превышающим два, i меняется от 1 до N, и λ является длиной волны, и получают N уравнений «Ei»: Едатчик(λ)i=RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i) с учетом аддитивного характера волнообразного света и по определению однородной диффузной отражательной способности RОБ(λ), по меньшей мере, в одной точке объекта; и
при помощи указанного устройства определяют две непрерывные неизвестные функции RОБ(λ) и Iвнеш(λ) посредством решения системы из N уравнений Ei:
- интегрируя каждое уравнение Ei на пересечении спектров источника и датчика, обозначая x, y и z значения чувствительности в выбранной колориметрической базе, при этом каждое уравнение Ei приводит к трем уравнениям «интегрированного Ei»:
∫ Едатчик(λ)i*x(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*x(λ)*dλ
∫ Едатчик(λ)i*y(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*y(λ)*dλ
∫ Едатчик(λ)i*z(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*z(λ)*dλ
- вычисляя цифровое значение, соответствующее левому члену уравнений интегрированного Ei, при помощи выходных параметров цифрового датчика изображения;
- выражая две непрерывные неизвестные функции RОБ(λ) и Iвнеш(λ) при помощи конечного числа точек интерполяции (λj, yj), связанных, по меньшей мере, одной функцией интерполяции s(λ), чтобы сохранить непрерывный характер указанных непрерывных неизвестных функций RОБ(λ) и Iвнеш(λ), при этом λj являются длинами волн, выбранными в пересечении спектров источника и датчика, и являются входными параметрами способа, выбираемыми для минимизации точек интерполяции при данной точности; и
- изыскивая параметры yj функций RОБ(λ) и Iвнеш(λ), которые минимизируют систему наименьших квадратов ||А*Х-В||2, вытекающую из уравнений интегрированных Ei.
Таким образом, способ в соответствии с настоящим изобретением позволяет точно измерить однородную диффузную отражательную способность объекта, по меньшей мере, в одной точке, причем с большей степенью оптимизации по сравнению с известными решениями. Кроме того, настоящее изобретение прекрасно работает с общедоступными мобильными приборами.
Предпочтительно указанный способ дополнительно содержит этап определения значения внешнего осветителя Iвнеш(λ).
Предпочтительно указанный способ дополнительно содержит этап транскрипции функции RОБ(λ) однородной диффузной отражательной способности, по меньшей мере, в одной точке объекта в координатах CIE XYZ при данном осветителе.
Согласно варианту выполнения, число вспышек имеет такой же порядок величины, что и число точек интерполяции, для определения значений однородной диффузной отражательной способности RОБ(λ), по меньшей мере, в одной точке объекта и внешнего осветителя Iвнеш(λ).
Согласно варианту, указанный способ содержит этап определения значений однородной диффузной отражательной способности RОБ(λ), по меньшей мере, в одной точке объекта и внешнего осветителя Iвнеш(λ) в нескольких спектральных диапазонах.
Согласно варианту выполнения, указанное устройство использует экран для излучения цветных вспышек и электронный датчик изображения для приема света, отраженного объектом-мишенью.
Согласно частному варианту осуществления, указанное устройство является фотоаппаратом или камерой с встроенной или съемной вспышкой.
Предпочтительно указанное устройство использует волноводы для направления излучения и приема цветных вспышек.
Согласно варианту, указанный способ применяют для получения спектрометрических фотографий объекта и для реализации хроматических адаптации (баланса белого) в любом объеме.
Согласно другому варианту, указанный способ по одному из предыдущих пунктов формулы изобретения отличается тем, что его применяют для измерения цвета элемента, входящего в следующую группу: материалы, твердые тела, жидкости, газы, краски, обои, графические формы, текстиль, пластики, дерево, металлы, грунт, минералы, растения и пищевые продукты.
Согласно варианту осуществления, указанный способ применяют для измерения в медицинских или косметических целях на человеке и живых существах цветов, по меньшей мере, одного элемента, входящего в следующую группу: кожа, прыщи, родинки, волосы на голове и на теле, макияж и зубы.
Согласно варианту, указанный способ применяют при использовании одномерных или многомерных цветных штрихкодов.
Согласно частному варианту, указанный способ применяют с целью оказания помощи дальтоникам и/или слепым.
Объектом настоящего изобретения является также устройство, содержащее средство, выполненное с возможностью излучения цветных осветителей в виде световых потоков, и электронный датчик цветных изображений, для измерения однородной диффузной отражательной способности RОБ(λ), по меньшей мере, в одной точке объекта, помещенного в зону, находящуюся напротив и по существу перпендикулярно к указанному средству, выполненному с возможностью излучения цветных осветителей в виде световых потоков и находящемуся в поле видимости указанного электронного датчика цветных изображений, и освещаемого также внешним осветителем в виде неизвестного и постоянного окружающего внешнего светового потока Iвнеш(λ), отличающееся тем, что содержит средства для:
излучения последовательности из N осветителей Sисточник(λ)i (где N является натуральным целым числом, строго превышающим два, i меняется от 1 до N, и λ является длиной волны), при этом Sисточник(λ)i известен в зависимости от входных параметров указанного средства, выполненного с возможностью излучения цветных световых потоков, при этом указанный электронный датчик цветных изображений принимает световой поток, отраженный, по меньшей мере, в одной точке указанного объекта и входящий в датчик, при этом указанный световой поток обозначают Едатчик(λ)i, где N является натуральным целым числом больше единицы, i меняется от 1 до N, и λ является длиной волны, и получают N уравнений (Ei): Едатчик(λ)i=RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i) с учетом аддитивного характера волнообразного света и по определению однородной диффузной отражательной способности RОБ(λ), по меньшей мере, в одной точке объекта; и
определения двух непрерывных неизвестных функций RОБ(λ) и Iвнеш(λ) посредством решения системы из N уравнений Ei:
- интегрируя каждое уравнение Ei на пересечении спектров источника и датчика, обозначая x, y и z значения чувствительности в выбранной колориметрической базе, при этом каждое уравнение Ei приводит к трем уравнениям «интегрированного Ei»:
∫ Едатчик(λ)i*x(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*x(λ)*dλ
∫ Едатчик(λ)i*y(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*y(λ)*dλ
∫ Едатчик(λ)i*z(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*z(λ)*dλ
- вычисляя цифровое значение, соответствующее левому члену уравнений интегрированного Ei, при помощи выходных параметров цифрового датчика изображения;
- выражая две непрерывные неизвестные функции RОБ(λ) и Iвнеш(λ) при помощи конечного числа точек интерполяции (λj, yj), связанных, по меньшей мере, одной функцией интерполяции s(λ), чтобы сохранить непрерывный характер указанных непрерывных неизвестных функций RОБ(λ) и Iвнеш(λ), при этом λj являются длинами волн, выбранными в пересечении спектров источника и датчика, и являются входными параметрами способа, выбираемыми для минимизации точек интерполяции при данной точности; и
- изыскивая параметры yj функций RОБ(λ) и Iвнеш(λ), которые минимизируют систему наименьших квадратов ||А*Х-В||2, вытекающую из уравнений интегрированных Ei.
Краткое описание чертежей
Изобретение будет более очевидно из нижеследующего описания варианта выполнения изобретения со ссылками на прилагаемые чертежи, на которых:
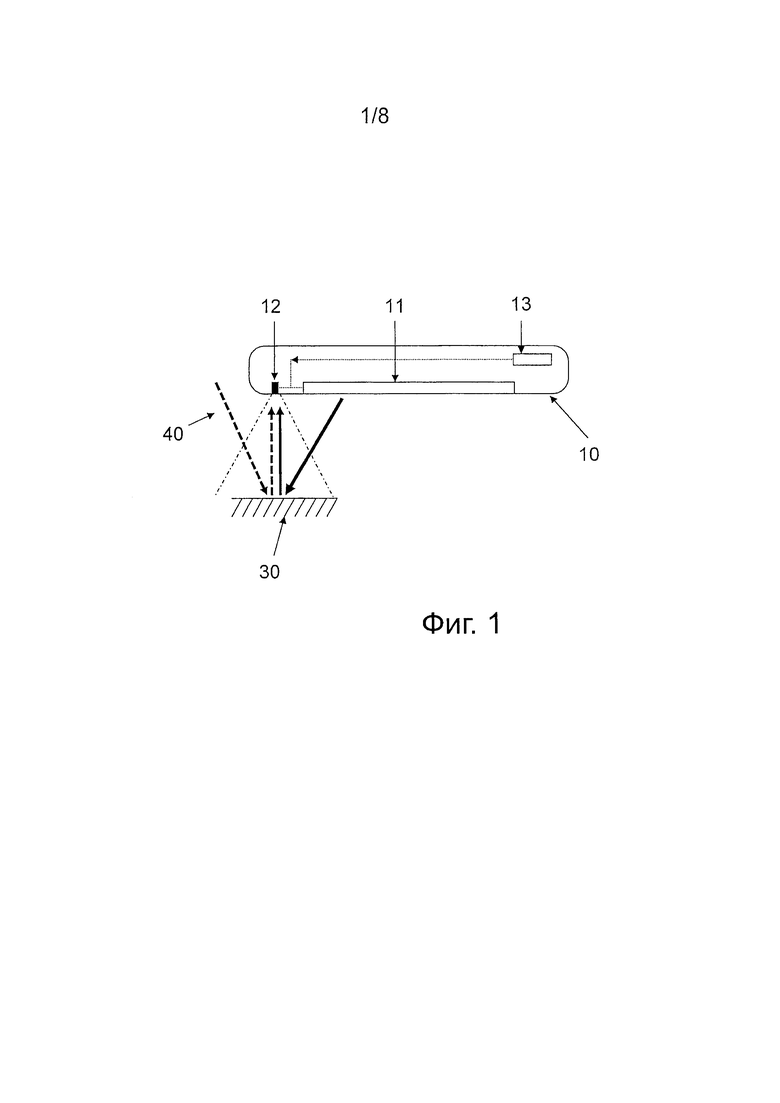
Фиг. 1 - схематичный вид устройства в соответствии с настоящим изобретением.
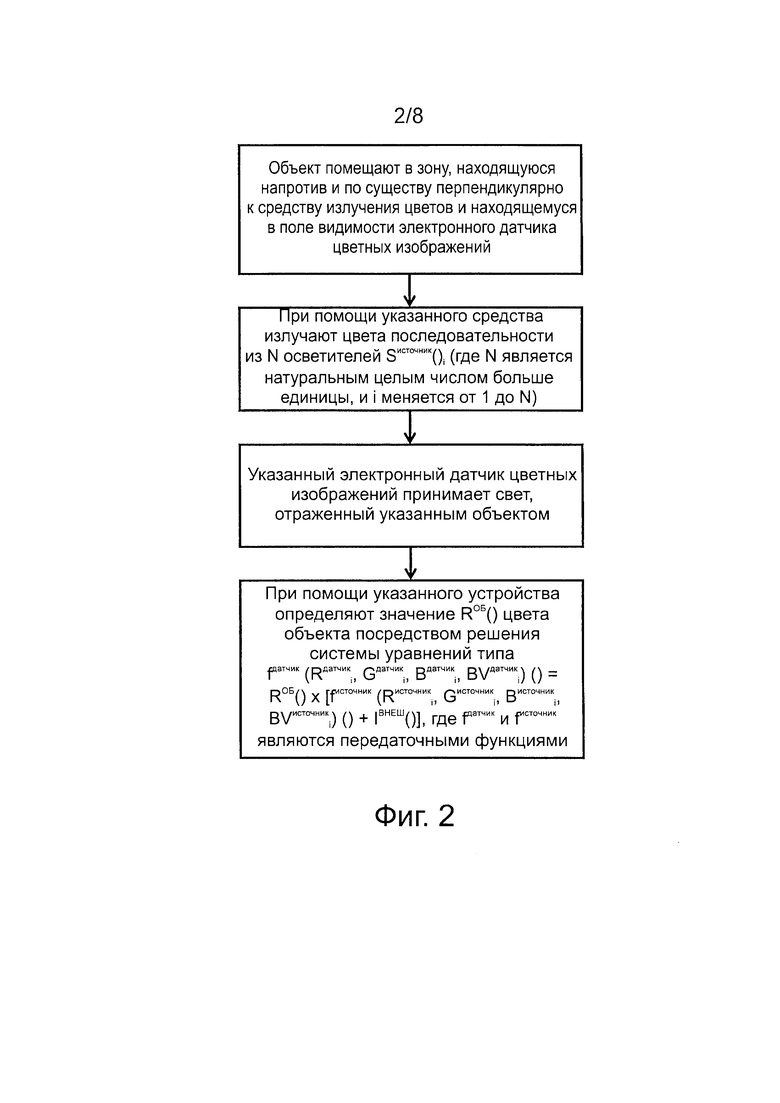
Фиг. 2 - различные этапы способа в соответствии с настоящим изобретением.
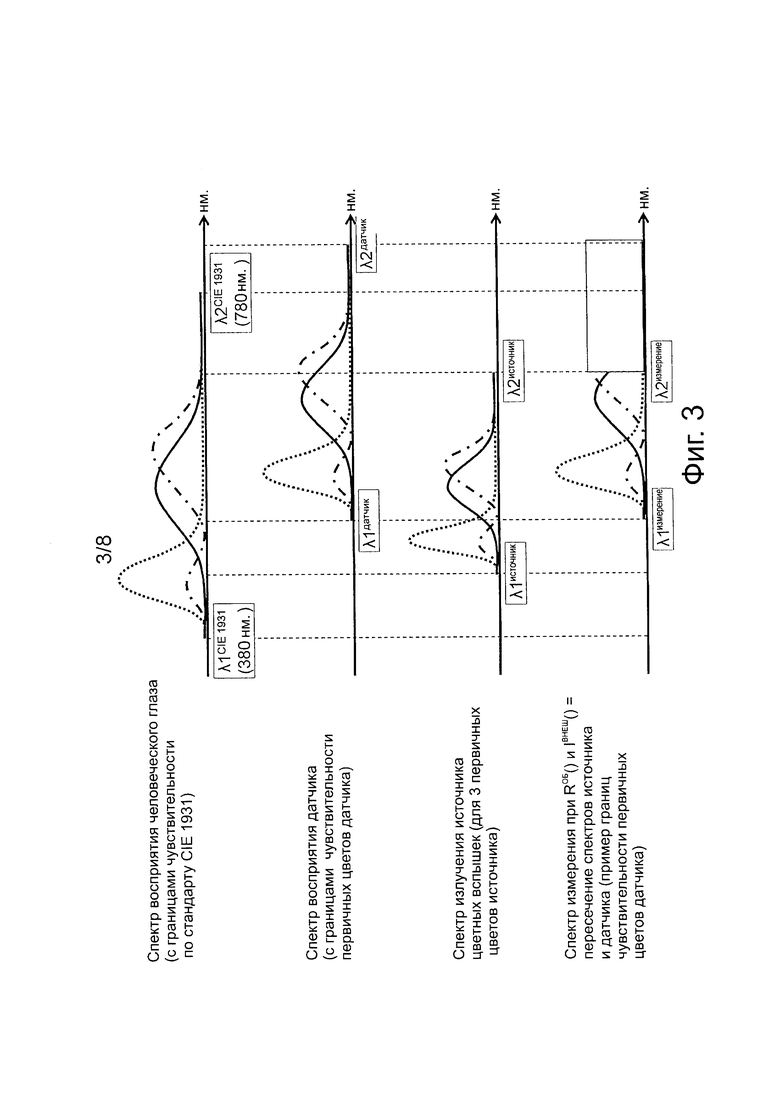
Фиг. 3 - иллюстрирует систематическое отсутствие перекрывания диапазонов длин волн, используемых в рамках заявленного способа: человеческий глаз, датчик, источник, измерение.
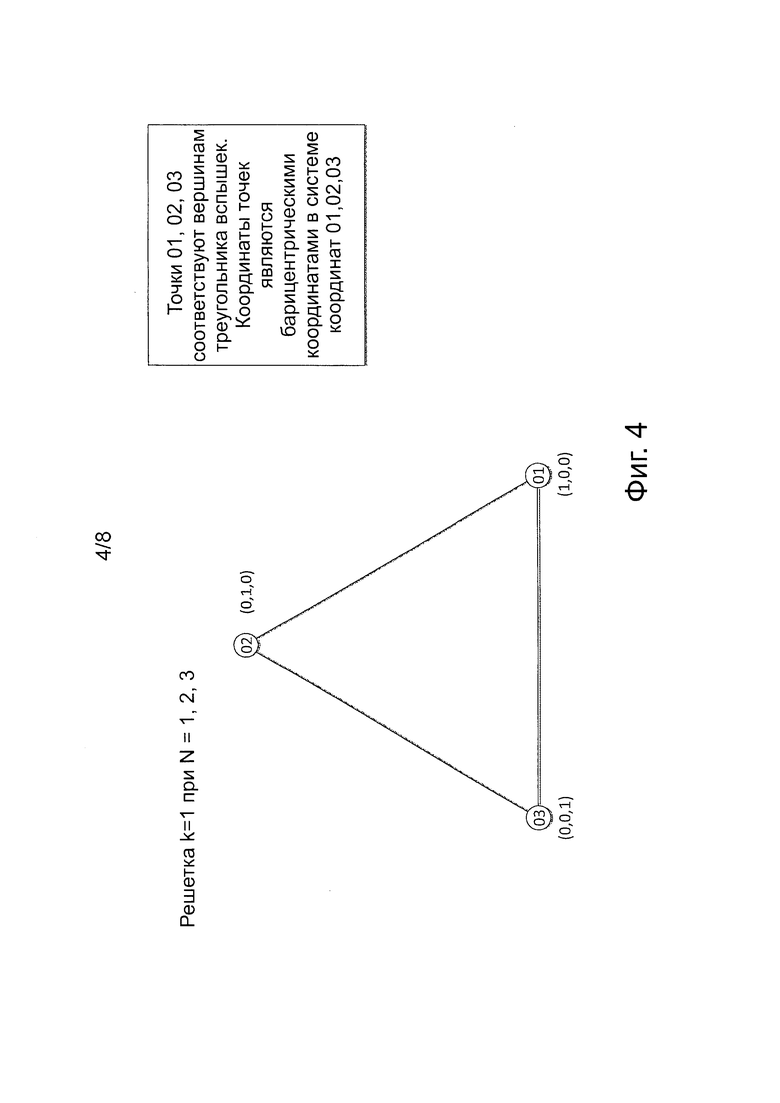
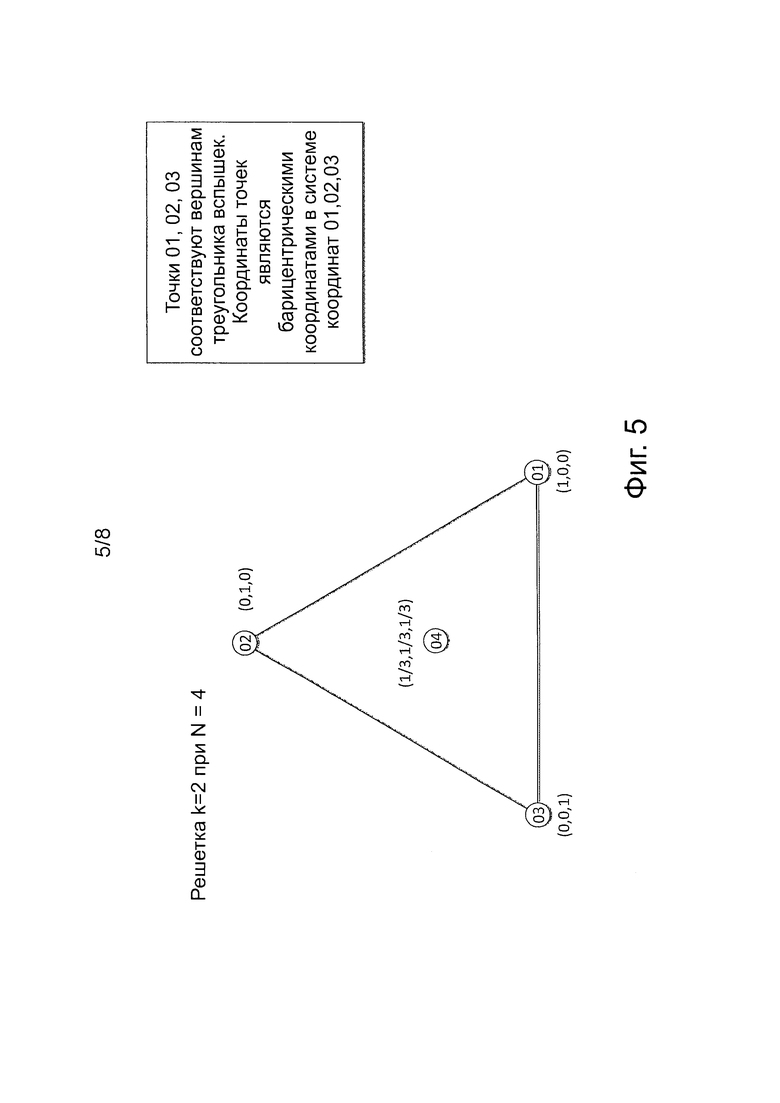
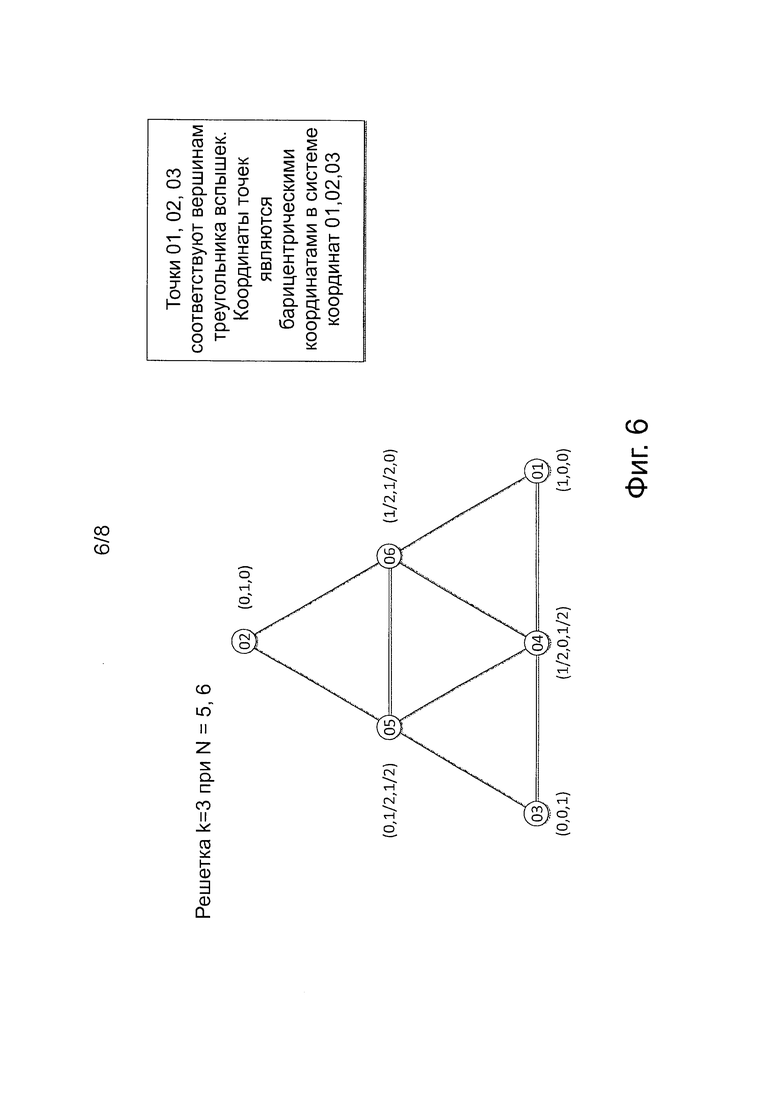
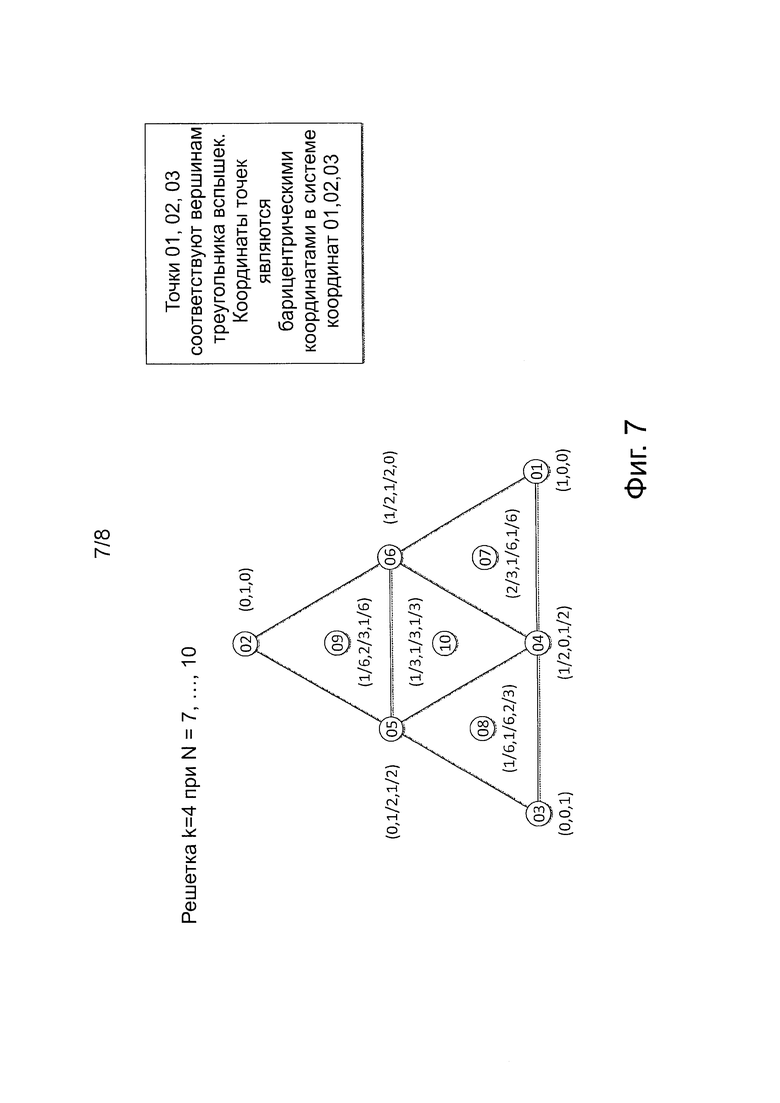
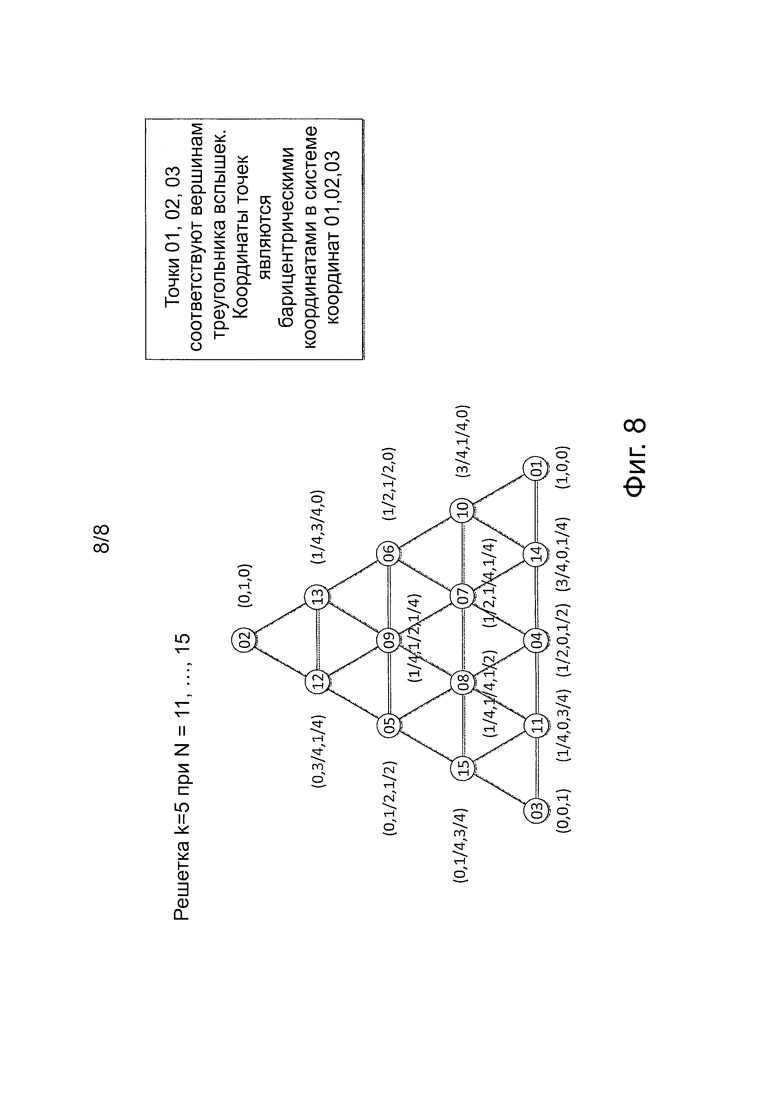
Фиг. 4, 5, 6, 7 - иллюстрируют алгоритм освещения вспышками, в данном случае создания последовательных решеток для наиболее равномерного распределения N вспышек внутри треугольника вспышек.
Подробное описание вариантов выполнения изобретения
Прежде всего следует отметить, что в этом параграфе использованы следующие обозначения: датчик = электронный датчик цветных изображений (в рамках эталонирования функцию видео не используют, а используют только съемку статических изображений); источник - источник цветных осветителей/вспышек (экран, диод(ы), лазер(ы) и т.д.): (R,G,B)источникi = нелинейные входные параметры цветности источника цветных осветителей (RGBWисточникi или RGBYисточникi для устройств с 4 и более первичными цветами); BLисточникi - нелинейный входной параметр яркости источника цветных осветителей (например, подсветка жидкокристаллического экрана); (R,G,B)датчикi = нелинейные выходные параметры цветности светового потока, принимаемого датчиком цветных изображений; BVдатчикi = нелинейный выходной параметр яркости светового потока, принимаемого датчиком цветных изображений (например, Brightness Value японской нормы EXIF); ОБ = измеряемый цветной объект; ВНЕШ = окружающий внешний осветитель; R/G/B = уравнение для каждого первичного цвета: красный (red) или зеленый (green) или синий (blue); ОБ/ВНЕШ = уравнение для цветного объекта или для внешнего осветителя; x/y/z(λ) = уравнение для каждой спектральной чувствительности x(λ), y(λ) и z(λ); спектральные границы чувствительности стандартного наблюдателя CIE 1931 = xEC_CIE_1931(λ), yEC_CIE_1931(λ), zEC_CIE_1931(λ) при λ∈[380 нм; 780 нм]; спектральные границы чувствительности электронного датчика цветных изображений: xEC_датчик(λ), yEC_датчик(λ), zEC_датчик(λ). Показатель степени ЕС_ХХХ обозначает, что речь идет о колориметрическом пространстве XXX.
На фигурах и в описанном ниже примере выполнения средство 11, выполненное с возможностью излучения цветов, является эмиссионным экраном. При этом подразумевается, что это средство 11, выполненное с возможностью излучения цветов, может быть также одним или несколькими многоцветными диодами, одним или несколькими многоцветными лазерами, одной или несколькими многоцветными вспышками или любым другим средством, выполненным с возможностью излучения «цветов» («цвет» = спектральная функция энергии в рассматриваемом диапазоне длин волн). Кроме того, на фигурах и в описанном ниже примере выполнения цвет объекта сведен к диффузной однородной отражательной способности. При этом подразумевается, что указанный способ позволяет улавливать другие составляющие отражательной способности, в частности, способность зеркального отражения для блестящих и глянцевых объектов при помощи выведения на экран белой фигуры на черном фоне и отслеживания сектора зеркального отражения, вытекающего из анализа градиента в фокусной плоскости изображения датчика цветных изображений.
На фиг. 1 в разрезе схематично показано устройство 10 в соответствии с изобретением для измерения цветов объекта и внешнего окружающего света, а также: измеряемый цветной объект 30 RОБ(λ); средство 11, выполненное с возможностью излучения цветов, которое может излучать N известных осветителей Sисточник(λ)i; внешний окружающий свет 40 Iвнеш(λ); электронный датчик 12 цветных изображений, характеризующий отраженный световой поток Едатчик(λ)i по цветности и яркости; «предварительно эталонированное по колориметрии» компьютерное приложение 13, управляющее всей системой и взаимодействующее с оператором.
В варианте изобретения компьютерное приложение 13 частично или полностью распределяют через сеть или «облако» (”cloud” в англо-саксонской терминологии).
На фиг. 2 представлены различные этапы заявленного способа, на которых:
указанный объект 30 помещают в зону, находящуюся напротив и по существу перпендикулярно к указанному средству 11, выполненному с возможностью излучения цветных осветителей в виде световых потоков и находящемуся в поле видимости указанного электронного датчика 12 цветных изображений, при этом указанный объект 30 освещается также внешним осветителем в виде неизвестного и постоянного окружающего внешнего светового потока 40 Iвнеш(λ), где λ обозначает длину волны, при помощи указанного средства 11 излучают последовательность из N осветителей Sисточник(λ)i (где N является натуральным целым числом больше единицы, i меняется от 1 до N, и λ является длиной волны), при этом Sисточник(λ)i известен в зависимости от входных параметров указанного средства 11, выполненного с возможностью излучения цветных световых потоков, при этом указанный электронный датчик 12 цветных изображений принимает световой поток, отраженный, по меньшей мере, в одной точке указанного объекта 30 и входящий в датчик, при этом указанный световой поток обозначают Едатчик(λ)i, где N является натуральным целым числом больше единицы, i меняется от 1 до N, и λ является длиной волны, и получают N уравнений «Ei»: Едатчик(λ)i=RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i) с учетом аддитивного характера волнообразного света и по определению однородной диффузной отражательной способности RОБ(λ), по меньшей мере, в одной точке объекта 30; и
при помощи указанного устройства 10 определяют две непрерывные неизвестные функции RОБ(λ) и Iвнеш(λ) посредством решения системы из N уравнений Ei:
- интегрируя каждое уравнение Ei на пересечении спектров источника и датчика, обозначая x, y и z значения чувствительности в выбранной колориметрической базе, при этом каждое уравнение Ei приводит к трем уравнениям «интегрированного Ei»:
∫ Едатчик(λ)i*x(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*x(λ)*dλ
∫ Едатчик(λ)i*y(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*y(λ)*dλ
∫ Едатчик(λ)i*z(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*z(λ)*dλ
- вычисляя цифровое значение, соответствующее левому члену уравнений интегрированного Ei, при помощи выходных параметров цифрового датчика изображения;
- выражая две непрерывные неизвестные функции RОБ(λ) и Iвнеш(λ) при помощи конечного числа точек интерполяции (λj, yj), связанных, по меньшей мере, одной функцией интерполяции s(λ), чтобы сохранить непрерывный характер указанных непрерывных неизвестных функций RОБ(λ) и Iвнеш(λ), при этом λj являются длинами волн, выбранными в пересечении спектров источника и датчика, и являются входными параметрами способа, выбираемыми для минимизации точек интерполяции при данной точности; и
- изыскивая параметры yj функций RОБ(λ) и Iвнеш(λ), которые минимизируют систему наименьших квадратов ||А*Х-В||2, вытекающую из уравнений интегрированных Ei.
На фиг. 3 показано систематическое отсутствие перекрывания диапазонов длин волн в рамках способа в соответствии с настоящим изобретением:
Человеческий глаз: в соответствии с нормой CIE 1931 он воспринимает световой поток между λ1CIE 1931=380 нм и λ2CIE 1931=780 нм со спектральными границами чувствительности, обозначаемыми x/y/zEC_CIE_1931(λ), отсюда хорошо известное специалисту колориметрическое пространство X/Y/ZEC_CIE_1931 при интегрировании по [λ1CIE_1931; λ2CIE_1931];
Датчик: воспринимает световой поток между λ1датчик и λ2датчик со спектральными границами чувствительности, обозначаемыми x/y/zEC_датчик(λ), отсюда колориметрическое пространство X/Y/ZEC_датчик при интегрировании по [λ1датчик; λ2датчик], по примеру колориметрического пространства CIE 1931. Необходимо отметить, что спектральный диапазон обычных электронных датчиков изображений (CCD, CMOS) охватывает часть инфракрасной области в дополнение к видимой области (за исключением случаев присутствия инфракрасного фильтра);
Источник: источник излучает цветные вспышки в интервале [λ1источник; λ2источник], где  Если источник является жидкокристаллическим экраном мобильного телефона, то обычно охватываемый спектральный диапазон ограничен пределами [300 нм; 700 нм], то есть является намного более узким, чем охватываемый спектральный диапазон человеческого глаза [380 нм; 780 нм];
Если источник является жидкокристаллическим экраном мобильного телефона, то обычно охватываемый спектральный диапазон ограничен пределами [300 нм; 700 нм], то есть является намного более узким, чем охватываемый спектральный диапазон человеческого глаза [380 нм; 780 нм];
Измерение: Измерение функций RОБ(λ) и Iвнеш(λ) можно осуществлять только на пересечении спектров источника и датчика, которое обозначают [λ1измерение; λ2измерение]. Действительно, с одной стороны, датчик не улавливает ничего за пределами своего спектра интегрирования. С другой стороны, матрица AT*A должна быть обратимой, что проверяется, когда  (см. конец подробного описания и приложение 2). Выбор границ чувствительности x/y/zEC_измерение(λ)>0 по [λ1измерение; λ2измерение] и нулевых за его пределами позволяет создать колориметрическое пространство XYZEC_измерение по примеру нормы CIE 1931. Можно также использовать значения чувствительности датчика согласно норме CIE 1931, если диапазон [λ1измерение, λ2измерение] включен в интервал [380 нм; 780 нм].
(см. конец подробного описания и приложение 2). Выбор границ чувствительности x/y/zEC_измерение(λ)>0 по [λ1измерение; λ2измерение] и нулевых за его пределами позволяет создать колориметрическое пространство XYZEC_измерение по примеру нормы CIE 1931. Можно также использовать значения чувствительности датчика согласно норме CIE 1931, если диапазон [λ1измерение, λ2измерение] включен в интервал [380 нм; 780 нм].
Из фигуры 3 и представленных выше пояснений вытекает, что способ в соответствии с изобретением позволяет определять значения однородной отражательной способности RОБ(λ) и внешнего осветителя Iвнеш(λ) в спектральных диапазонах, отличных от диапазона видимой области, при условии что источник и датчик являются совместимыми с этими диапазонами и что «свет» сохраняет волнообразный характер: ультрафиолетовое излучение, инфракрасные лучи и т.д.
Фиг. 4, 5, 6, 7 и 8 иллюстрируют алгоритм освещения вспышками и описывают решетки к, используемые в зависимости от возрастающего числа необходимых вспышек N, для максимального равномерного распределения вспышек в данном треугольнике вспышек, совместимом с гамутом источника и датчика. Последовательность решеток к является итеративной, когда N возрастает:
На фиг. 4 показана решетка k=1, используемая при N, составляющем от 1 до 3. Положение каждой вспышки i указано ее номером.
На фиг. 5 показана решетка k=2, используемая при N=4. Положение каждой вспышки i указано ее номером.
На фиг. 6 показана решетка k=3, используемая при N, составляющем от 5 до 6. Положение каждой вспышки i указано ее номером.
На фиг. 7 показана решетка k=4, используемая при N, составляющем от 7 до 10. Положение каждой вспышки i указано ее номером.
На фиг. 8 показана решетка k=5, используемая при N, составляющем от 11 до 15. Положение каждой вспышки i указано ее номером.
Далее следует описание обработки для определения неизвестных RОБ(λ) и Iвнеш(λ) на основании N цветных вспышек.
В варианте выполнения, представленном на фиг. 1, измеряемый объект 30 помещен под источником цветных вспышек 11 и в поле видимости электронного датчика 12 цветных изображений.
Затем источник 11 последовательно излучает последовательность цветных вспышек в соответствии с алгоритмом освещения вспышками, описанным в приложении 1, целью которого является оптимизация упорядочения матрицы А в пределах гамута экрана и камеры, при этом внешний осветитель должен оставаться постоянным во время вспышек.
Этот алгоритм использует на входе число затребованных нормальных вспышек N. N зависит от числа т точек интерполяции, необходимых для определения функций RОБ(λ) и Iвнеш(λ). Как минимум, 3*N≥(2n+2), чтобы правильно определить систему А*Х=В (см. конец подробного описания), то есть N≥2/3*(n+1).
На выходе алгоритм освещения вспышками выдает последовательность из N нормальных вспышек и, для каждой вспышки, входные параметры источника и выходные параметры датчика. Индекс последовательности вспышек обозначен i.
Примечание: Если для определения функций RОБ(λ) и Iвнеш(λ) необходима точность порядка 10 нм, N≈n≈30. С учетом реакции существующих электронных компонентов весь цикл освещения вспышками занимает не более десятка секунд. Для неоднородной мишени (например, текстуры) способ применяет алгоритм стабилизации изображения, по меньшей мере, с одной точкой контраста.
Примечание: Если источником цветных вспышек 11 является эмиссионный экран, он может генерировать большое число цветных вспышек, и, как правило, N может достигать 224=16,7 миллионов для систем RGB на 3×8 бит.
Для каждой вспышки i свет, излучаемый источником 11, отражается от окрашенной стороны 30, затем поступает в датчик 12 изображения, что дает уравнение (Ei): Едатчик(λ)i=RОБ(λ)*(Sисточник(λ)i+Iвнеш(λ)).
Развернем уравнение (Ei):
Едатчик(λ)i=RОБ(λ)*[(Sисточник(λ)i+Iвнеш(λ))]=RОБ(λ)*Sисточник(λ)i+Iвнеш(λ)
Если принять Iвнеш контр(λ)=RОБ(λ)*Iвнеш(λ)
Уравнение (Ei) принимает вид: Едатчик(λ)i=RОБ(λ)*(Sисточник(λ)i+Iвнеш контр(λ))
где значения с индексом КОНТР являются контрольными (опорными значениями).
Во-первых, способ интерполирует функции RОБ(λ) и Iвнеш(λ) при помощи закрытой кубической сплайн-функции и при помощи (nОБ/ВНЕШ КОНТР+1) точек интерполяции координат [xk=λОБ/ВНЕШ КОНТРk, yОБ/ВНЕШ КОНТРk] при k = от 0 до nОБ/ВНЕШ КОНТР, при этом:
- все λОБ/ВНЕШ КОНТРk заключены в пересечении спектров датчика и источника [λ1измерение; λ2измерение] (см фиг. 3) при λОБ/ВНЕШ КОНТР0=λ1измерение и ;
;
- нулевой наклон сплайнов является нулевым на концах: р0=p nОБ/ВНЕШ КОНТР=0
Все yОБ/ВНЕШ КОНТРk являются неизвестными, которые должен определить способ.
Поскольку функции RОБ(λ) и Iвнеш(λ) являются закрытыми сплайн-функциями с нулевым наклоном на концах, RОБ(λ) и Iвнеш(λ) можно записать в линейной форме:


где:
- l от 1 до nОБ/ВНЕШ КОНТР, при этом λl-1<λ≤λ1 и l=0, если λ=λ1измереиие;
- ФВНЕШ КОНТР(l,k,λ)=аОБ/ВНЕШКОНТРk+bОБ/ВНЕШКОНТРk*(λ-λl-1)+cОБ/ВНЕШКОНТРk*-(λ-λl-1)2*(λ-λl)+dОБ/ВНЕШКОНТРk*(λ-λl-1)*(λ-λ1)2 при k = от 0 до nОБ/ВНЕШ КОНТР;
- аОБ/ВНЕШКОНТРk=0 при k = от 0 до l-1;
- аОБ/ВНЕШКОНТРl-1=1;
- аОБ/ВНЕШКОНТРl=0;
- аОБ/ВНЕШКОНТРk=0 при k = от l+1 до nОБ/ВНЕШ КОНТР;
- bОБ/ВНЕШКОНТРk=0 при k = от 0 до l-1;
- bОБ/ВНЕШКОНТРl-1=1/(λl-1-λl);
- bОБ/ВНЕШКОНТРl=-1/(λl-1-λl);
- bОБ/ВНЕШКОНТРk=0 при k = от l+1 до nОБ/ВНЕШ КОНТРk;
- cОБ/ВНЕШКОНТРk=αОБ/ВНЕШ КОНТР(l,k)/hОБ/ВНЕШКОНТРl-l2 при k = от 0 до l-1;
- cОБ/ВНЕШКОНТРl-1=(αОБ/ВНЕШ КОНТР(l,l-1)-1/(λl-1-λl))/hОБ/ВНЕШКОНТРl-l2;
- cОБ/ВНЕШКОНТРl=(αОБ/ВНЕШ КОНТР(l,l)+1/(λl-1-λl))/hОБ/ВНЕШКОНТРl-l2;
- cОБ/ВНЕШКОНТРk=αОБ/ВНЕШ КОНТР(l,k)/hОБ/ВНЕШКОНТРl-l2 при k = от l+1 до nОБ/ВНЕШКОНТРk;
- dОБ/ВНЕШКОНТРk=αОБ/ВНЕШ КОНТР(l-1,k)/hОБ/ВНЕШКОНТРl-l2 при k = от 0 до l-1;
- dОБ/ВНЕШКОНТРl-1=(αОБ/ВНЕШ КОНТР(l-1,l-1)-1/(λl-1-λl))/hОБ/ВНЕШКОНТРl-l2;
- dОБ/ВНЕШКОНТРl=(αОБ/ВНЕШ КОНТР(l-1,l)+1/(λl-1-λl))/hОБ/ВНЕШКОНТРl-l2;
- dОБ/ВНЕШКОНТРk=αОБ/ВНЕШ КОНТР(l-1,k)/hОБ/ВНЕШКОНТРl-l2 при k = от l+1 до nОБ/ВНЕШКОНТРk;
- hОБ/ВНЕШКОНТРl-l=λl-λl-1 при 1 = от 1 до hОБ/ВНЕШКОНТР;
- Все αОБ/ВНЕШКОНТР(l-1,k) выражают наклон сплайна в точке 1 в зависимости от yОБ/ВНЕШКОНТРk: 
Значения  вычисляют путем инверсии (путем поворота) следующей линейной системы, характеризующей закрытые кубические сплайн-функции; они зависят только от λl (l = от 0 до nОБ/ВНЕШ КОНТР):
вычисляют путем инверсии (путем поворота) следующей линейной системы, характеризующей закрытые кубические сплайн-функции; они зависят только от λl (l = от 0 до nОБ/ВНЕШ КОНТР):

Во-вторых, в рамках способа известна передаточная функция источника цветных вспышек fисточник, которая дает функции Sисточник (λ)i в зависимости от входных параметров источника по цветности (R,G,B)источникi=(CисточникR/G/Bi) и по яркости BLисточникi=CисточникBLi. Эту передаточную функцию определяют на основании выходных «заводских» теоретических значений электронного устройства и/или эталонирования до измерения. Не обязательно возобновлять это эталонирование перед каждым измерением цвета. Эта передаточная функция имеется также для устройств с 4 и более первичными цветами (красный-зеленый-синий-белый, красный-зеленый-синий-желтый и т.д.).
В качестве иллюстрации можно указать следующую форму передаточной функции источника с учетом того, что общедоступные электронные устройства стремятся соблюдать стандарт sRGB:
- fисточник(CисточникR/G/B/BLi)(λ)=Sисточник(λ)i
- fисточник(CисточникR/G/B/BLi)(λ)=CисточникBLлинейная i*(Sисточник(λ)Ri+Sисточник(λ)Gi+Sисточник(λ)Bi);
- 
- Sисточник(λ)R/G/Bi=CисточникR/G/Bлинейнаяi*Sисточник(λ)R/G/B MAX
- 
Где a, b, с, γ, g - являются обозначениями в соответствии со стандартом Лаборатория JET NASA, Solving Least Squares Problems, издательство SIAM.
В-третьих, в рамках способа известна передаточная функция электронного датчика цветного изображения fдатчик, которая в колориметрическом пространстве измерения дает трихроматические координаты (X,Y,Z)EC_измерениеi светового потока Едатчик(λ)i, входящего в датчик, в зависимости от его выходных параметров цветности (R,G,B)датчикi=(CдатчикR/G/Bi) и яркости  . Эту передаточную функцию определяют на основании выходных «заводских» теоретических значений электронного устройства и/или эталонирования до измерения. Не обязательно возобновлять это эталонирование перед каждым измерением цвета.
. Эту передаточную функцию определяют на основании выходных «заводских» теоретических значений электронного устройства и/или эталонирования до измерения. Не обязательно возобновлять это эталонирование перед каждым измерением цвета.
В качестве иллюстрации можно указать следующую форму передаточной функции электронного датчика цветного изображения с учетом того, что общедоступные электронные устройства стремятся соблюдать стандарт sRGB:
Яркость Y: Из EXIF извлекают Brightness Value Bvдатчик для вычисления яркости Bдатчик входящего светового потока (Bv=Log2(B/N/K) в кд/см2) при N=1/3,125 и К=10,7, затем определяют яркость Y=К*В (К является параметром эталонирования, связанным с различными потерями: рассеяние света на экране, поглощение линзы и т.д.).
Цветность (x,y)EC_измерение: во-первых, линеаризуют 3 координаты (RGB)датчик при помощи параметрической функции гамма (g,a,b) f(x)=(a*x+b)g и получают 3 координаты (RGB_линейная)ЕС_датчик. Во-вторых, 3 координаты (RGB_линейная)ЕС_датчик преобразуют в 3 координаты (RGB_необработанная)ЕС_датчик посредством перемножения с матрицей 3×3 [WBдатчик], которая соответствует значениям баланса белых цветов. Баланс белых цветов состоит в хроматической адаптации, чтобы перейти от белого D65 (эталон sRGB) к оценочному белому. В-третьих, 3 координаты (RGB_необработанная)ЕС_датчик преобразуют в 3 координаты (X,Y,Z)EC_измерение посредством перемножения с переходной матрицей 3×3 [PEC_датчик>EC_измерение], которая соответствует изменению векторной базы для перехода от колориметрического пространства датчика к векторному подпространству, которое является колориметрическим пространством измерения. В-четвертых, 3 координаты (X,Y,Z)EC_измерение преобразуют В (x,y)EC_измерение.
Теперь развернем уравнения (Ei), интегрируя их на пересечение спектров датчика и источника [λ1измерение; λ2измерение] (см. фиг. 3) для создания уравнений «Ei интегрированные»:


После перестановки порядка сложений уравнения (Ei интегрированные) принимают следующий вид:


Принимая nОБ+ВНЕШ КОНТР=(nОБ+1)+(nВНЕШ КОНТР+1);
Принимая вектор XОБ+ВНЕШ КОНТР размером ОБ+ВНЕШ КОНТР, при котором:
(XОБ+ВНЕШ КОНТР)T=(yОБ0,…,yОБnОБ,yВНЕШ КОНТР0,…,yВНЕШ КОНТРnВНЕШ КОНТР);
(XОБ+ВНЕШ КОНТР)T=(XОБ+ВНЕШ КОНТР1,…,XОБ+ВНЕШ КОНТРnОБ+ВНЕШ КОНТР);
Принимая переменные ФОБ+ВНЕШ КОНТР(i,k*,X/Y/ZEC_измерение) такими что:
- если 1≤k≤nОБ+1:

- если nОБ+2≤k'<nОБ+nВНЕШ К0НТР+2:

Уравнения (Ei интегрированные) можно записать в виде следующих 3*N уравнении с единственными неизвестными XОБ+ВНЕШ КОНТРk:

Возьмем матрицу Джейкоба А размером (3*N; nОБ+ВНЕШ КОНТР):
Примем вектор В равным fдатчик(CдатчикR/V/B/BLi)(X,Y,Z)EC_измерение размером 3*N (где i составляет от 1 до N).
В этом случае уравнения (Ei интегрированные) образуют линейную систему А*Х=В.
В рамках способа используют алгоритм наименьших квадратов для минимизации ||А*Х-В||2. Минимум достигается при: Xmin=(AT.A)-1.AT.B, откуда получаем значения точек интерполяции RОБ(λ) и IВНЕШ КОТР(λ), и, следовательно, IВНЕШ(λ)=IВНЕШ КОТР(λ)/RОБ(λ).
Необходимо соблюдать 3 условия: матрица AT. А является обратимой, если и только если А является инъективным, что достоверно при  в интервале [λ1измерение, λ2измерение] и при достаточно малом h=max(λk+1-λk). Математическое доказательство записано в приложении 2. Кроме того, XОБ+ВНЕШ КОНТРk≥0 при всех k, так как они являются координатами потока энергии.
в интервале [λ1измерение, λ2измерение] и при достаточно малом h=max(λk+1-λk). Математическое доказательство записано в приложении 2. Кроме того, XОБ+ВНЕШ КОНТРk≥0 при всех k, так как они являются координатами потока энергии.
Первое условие проверяется построением [λ1измерение, λ2измерение] в качестве пересечения спектров источника и датчика (см. фиг. 3), а второе - при минимуме точек интерполяции для RОБ(λ) и IВНЕШ(λ).
Что касается третьего условия, поиск Xmin осуществляют при условии XОБ+ВНЕШ КОНТРk≥0 при всех k, используя, кроме сего прочего, алгоритм NLLS Лоусона и Хансона (Лаборатория JET NASA, Solving Least Squares Problems, издательство SIAM) или, в целом, алгоритм квадратичной оптимизации.
Примечание: Способ можно предусмотреть с другими функциями интерполяции в линейном или нелинейном варианте. Линейный вариант можно также предусмотреть для перехода от системы 3*N уравнений по составляющим X,Y,ZEC_измерение к системе N уравнений в виде норм типа эвклидовых (||..||2) или типа дельтаЕ координат (X,Y,Z)EC_измерение.
Примечание: Способ работает, с одной стороны, с датчиками, дающими доступ к координатам (R,G,B_необработанное) и, с другой стороны, с датчиками, не дающими доступа к координатам (R,G,B_необработанное), не дающими доступа к значениям матриц баланса белого, но позволяют заблокировать эти значения баланса белого во время процесса освещения вспышками. В этом втором случае значения матрицы баланса белого становятся дополнительными неизвестными (не более 9), которые необходимо определить. Для решения этой системы А*Х=В, увеличенной на неизвестные баланса белого, увеличивают число вспышек для получения сверхопределенной системы, затем ее решают либо в нелинейном варианте, либо в итеративном линейном варианте следующим образом (в том числе, когда возможные значения параметров баланса белого включены в конечную совокупность дискретных значений): разложение QR системы с двумя блоками (X | баланс белого), определение X с первым блоком с предположением по параметрам баланса белого, введение значений X во второй блок, определение параметров баланса белого, затем повторное введение в первый блок для итерации X, и так далее.
Для изобретения в варианте «колориметра» возможны два способа реализации визирования с целью обогащения опыта пользователя и повышения точности варианта «каталога цветов» изобретения:
Первый способ реализации: экран 11 нацеливают противоположно глазам пользователя
Второй способ реализации: экран 11 нацеливают в направлении глаз пользователя
Первый способ реализации: экран нацелен противоположно глазам пользователя
На экран 1 выведена белая фигура на черном фоне (круг/полосы/квадрат …) для материального отображения визируемого места, затем пользователь нажимает на спуск, обычно используемый для съемки фотографии (например, кнопка на боковой стороне для iPhone S или на нижней стороне экрана противоположно положению веб-камеры).
Этот первый способ реализации представляет интерес, так как он является мало чувствительным к световой окружающей среде, что обеспечивает работу изобретения практически во всех обычных местах, даже очень освещенных (интерьер, открытое пространство). Это качество основано на очень коротком расстоянии между мишенью, экраном 11 и датчиком 12 изображения, на сильной яркости эмиссионных экранов и на том, что существуют несколько «препятствий» для окружающих световых лучей:
держатель экрана или датчика изображения, рука/палец(пальцы) пользователя на боковых сторонах.
Второй способ реализации: экран нацелен в направлении глаз пользователя
Экран 11 поворачивают напротив внешнего осветителя, как правило, в сторону неба. При этом пользователь помещает над экраном предназначенный для измерения окрашенный объект (часть, близкая к датчику изображения). Для облегчения операции экран 11 поделен на две части, при этом верхняя часть, близкая к датчику изображения, служит для излучения светового потока с целью измерения, а нижняя часть служит для обеспечения отображения визируемого места для пользователя (wysiwyg).
Преимуществом этого второго способа реализации является возможность измерения отражательной способности экрана Rэкран(λ).
Устройство 10 в соответствии с настоящим изобретением позволяет трансформировать к спектрометр все электронные приборы, имеющие эмиссионный экран и расположенный сбоку датчик 12 изображения, в том числе телефоны, планшеты, PDA (личный цифровой секретарь), компьютеры и мониторы/телевизоры, оборудованные веб-камерой. Оно применимо также для фотоаппаратов и видеокамер, имеющих ориентируемый/съемный экран.
Устройство 10 в соответствии с настоящим изобретением позволяет открыть новые мобильные возможности надежного измерения абсолютного цвета в повседневной жизни, не прибегая к специальной аппаратуре. Указанный ниже список этих возможностей не является ограничительным:
измерение цветов на объектах любого типа: материалы, твердые тела, жидкости, газы, краски, обои, графические формы, текстиль, пластики, дерево, металлы, грунт, минералы, растения и пищевые продукты …;
использование цветных штрихкодов (одномерных или многомерных);
измерение цветов в медицинских или косметических целях на человеке и живых существах: кожа, прыщи, родинки, волосы на голове и на теле, макияж, зубы …;
измерение цветов с целью оказания помощи дальтоникам и/или слепым;
измерение цвета объекта(ов), проявляющегося на фотографии, с целью хроматической адаптации и направления алгоритма баланса белого, вместо использования дополнительной сетки эталонированных цветов.
Настоящее изобретение описано в качестве примера. Разумеется, специалист может предусматривать различные версии изобретения, не выходя при этом за рамки объема патентных притязаний.
ПРИЛОЖЕНИЕ 1: АЛГОРИТМ ОСВЕЩЕНИЯ ВСПЫШКАМИ
Введение
В настоящем приложении представлен алгоритм освещения вспышками, предназначенный для оптимизации упорядочения матрицы А с целью максимального удаления указанных вспышек и их распределения максимально равномерно в колориметрическом пространстве измерения, оставаясь при этом в пределах гамутов источника и электронного датчика изображения и проверяя, чтобы во время вспышек внешний осветитель оставался постоянным.
Описание алгоритма освещения вспышками
Указанный алгоритм использует на входе число N необходимых нормальных вспышек.
Указанный алгоритм выдает на выходе последовательность из N нормальных вспышек (с входными параметрами источника и выходными параметрами датчика для каждой вспышки). Индекс этой последовательности обозначен i (flash_i).
Указанный алгоритм взаимодействует со способом и устройством в соответствии с изобретением, которое излучает цветные вспышки в сторону объекта-мишени и которое принимает отраженный свет при помощи электронного датчика изображения (в том числе смартфона с экраном, который излучает вспышки, и веб-камеры, которая принимает свет, отраженный от объекта-мишени).
Указанный алгоритм работает в присутствии внешнего осветителя IВНЕШ(λ).
Алгоритм делится на 4 больших «фазы», а каждая фаза - на «этапы»:
- Фаза 1: излучение вспышки «черная 1»
- Фаза 2: поиск 3 вершин, которые максимизируют «треугольник вспышек»
- Фаза 3: равномерное комплектование числа необходимых нормальных вспышек
- Фаза 4: излучение вспышки «черная 2».
Примечание: в дальнейшем координаты (dispR%, dispG%, dispB%) обозначают входные параметры цветности источника цветных вспышек в процентах ([0;1]). DispBL% обозначает входной параметр яркости источника цветных вспышек в процентах ([0;1]). На практике это бинарные значения, обычно изменяющиеся от 0 до 255. (dispECMY, dispECMx, dispECMy) обозначают координаты светового потока, излучаемого источником, в колориметрическом пространстве YxyЕС_измерение.
Примечание: в дальнейшем координаты (camR%_k, camG%_k, camB%_k) обозначают выходные параметры цветности электронного датчика изображения в процентах ([0;1]). На практике это бинарные значения, обычно изменяющиеся от 0 до 255. camBv обозначает Brightness Value, то есть выходной параметр яркости электронного датчика изображения (см. стандарт EXIF). (camECMX, camECMY, camECMZ) и (camECMY, camECMx, camECMy) обозначают координаты светового потока, излучаемого источником, соответственно в колориметрическом пространстве XYZEC_измерение и в его диаграмме хроматичности.
Примечание: в дальнейшем значения dispEps и camEps обозначают пороговые значения, ниже которых входные значения источника и выходные значения датчика считаются нулевыми.
Фаза 1: Излучение вспышки «черная 1»
Фаза 1 преследует двойную цель: контроль совместимости внешнего осветителя с физическими пределами устройства и контроль постоянства внешнего осветителя во время вспышек.
Алгоритм излучает «черную» вспышку, то есть производит измерение с выключенным источником, то есть dispR%=dispG%=dispB%=0 (и, по возможности, dispBL=0).
Алгоритм сталкивается с 2 возможными случаями:
- Случай 1: Значение camECMY строго превышает предел camECMY IEmax, определяемый в зависимости от максимальной яркости источника цветных вспышек, что значит, что яркость внешнего осветителя является слишком большой по отношению к физическим пределам источника цветных вспышек. Измерение производить невозможно. Алгоритм прерывает процесс освещения вспышками, генерируя код ошибки.
- Случай 2: Значение camECMY меньше или равно пределу camECMY IEmax, определяемому в зависимости от максимальной яркости источника цветных вспышек, что значит, что яркость внешнего осветителя является совместимой с физическими пределами источника цветных вспышек. Алгоритм сохраняет в памяти значения цветности и яркости, измеренные датчиком цветных изображений, чтобы проверять, что осветитель остается постоянным во время освещения вспышками, затем алгоритм переходит на этап 1 фазы 2.
Примечание: в настоящем приложении 1 упомянуты только 2 черные вспышки для проверки постоянности внешнего осветителя: первая в начале освещения вспышками и вторая в конце. В зависимости от условий применения заявленного устройства можно уменьшить или увеличить число черных вспышек для контроля постоянности внешнего осветителя.
Фаза 2: Поиск 3 вершин, которые максимизируют «треугольник вспышек»
Целью фазы 2 является построение «подгамута вспышек» максимального размера при данной точности с сохранением совместимости с гамутом источника световых вспышек и с гамутом электронного датчика изображений.
Определим функцию f: (dispECMx, dispECy)→(camECMx, CamECMy) от гамута источника цветных вспышек к гамуту электронного датчика изображений.
«Подгамут источника-датчика» определяют как пересечение гамута датчика и изображения функцией f гамута источника. Подгамут источника определяют как обратное изображение, возвращенное функцией f подгамута датчика.
Иначе говоря, целью фазы 2 является определение треугольника, вписанного в «подгамут датчика-источника» и имеющего максимальный размер при данной точности. Этот треугольник называют «треугольником вспышек».
Этап 1: Поиск поворотной вспышки
Целью этапа 1 является определение поворотной вспышки внутри гамута датчика.
Алгоритм переходит к этапу 1.1, используя предварительно определенное значение поворотной вспышки при итерации k=1, например, белой вспышки максимальной яркости (dispR%_1=dispG%_1=dispB%_1=dispBL%_1=1).
Этап 1.1; Проверка поворотной вспышки к
Целью этапа 1.1 является проверка, чтобы убедиться, что предложенная вспышка с индексом k находится внутри гамута датчика.
Алгоритм подает команду источнику на генерирование поворотной вспышки к и получает выходные координаты датчика (camR%_k, camG%_k, camB%_k, camBv_k).
Алгоритм сталкивается с 2 возможными случаями:
- Случай 1.1-1: По меньшей мере, одна из составляющих (camR%_k, camG%_k, camB%_k) меньше или равна camEps, что значит, что вспышка находится за пределами гамута датчика. Алгоритм переходит на этап №1.2.
- Случай 1.1-2. Все составляющие (camR%_k, camG%_k, camB%_k) находятся строго внутри camEps, что значит, что вспышка находится внутри гамута датчика. Алгоритм переходит на этап 2.
Этап 1.2: Генерирование новой поворотной вспышки с индексом k+1
Целью этапа 1.2 является генерирование новой поворотной вспышки k+1 внутри гамута датчика в отличие от предыдущей поворотной вспышки с индексом k.
Алгоритм сталкивается с 2 возможными случаями в зависимости от (camR%_k, camG%_k, camB%_k):
- Случай 1.2-1: Только одна из трех составляющих является нулевой с поворотной вспышкой к. В этом случае алгоритм пробует новую поворотную вспышку (k+1) с большей долей обнуленной составляющей. Например, если
camR%k<camEps,
dispR%k+1=α*dispR%k,
dispG%k+1=dispG%k*(1-α*dispR%k)/(dispG%k+dispB%k),
dispB%k+1=dispB%k*(1-α*dispR%k)/(dispG%k+dispB%k)
при 1<α<1/dispR%k.
Алгоритм переходит на этап 1.1 с этой поворотной вспышкой k+1.
- Случай 1.2-2: Две из трех оставляющих являются нулевыми (camR%_k, camG%_k, camB%_k). В этом случае алгоритм пробует новую поворотную вспышку (k+1) с большей долей двух обнуленных составляющих. Например, если
camR%k<camEps и camG%k<camEps,
dispR%k+1=α*dispRα%k,
dispG%k+1=β*dispG%k,
dispB%k+1=1-α*dispR%k-β*dispG%k,
при α>1, β>1 и α*dispR%k+β*dispG%k<1.
Алгоритм переходит на этап 1.1 с этой поворотной вспышкой k+1.
- Случай 1.2-3: алгоритм не может найти новой поворотной вспышки k+1. В этом случае алгоритм объявляет измерение невозможным и прекращает работу, выдавая код ошибки.
Этап 2. Кратчайший путь для перехода от поворотной вспышки к первому треугольнику вспышек большого размера
Целью этапа 2 является экономия вспышек для увеличения размера треугольника вспышек вокруг поворотной вспышки.
Для этого алгоритм использует базу данных, которая на входе имеет входные и выходные значения контрольных вспышек и на выходе - координаты соответствующих треугольников вспышек. Таким образом, эта база данных представляет собой короткий путь для увеличения треугольника вспышек.
В частности, алгоритм охватывает поворотную вспышку 3 ближайшими контрольными вспышками (с точки зрения эквлидовой нормы в пространстве измерения). Затем он микширует координаты треугольников контрольных вспышек, используя барицентрические координаты поворотной вспышки в треугольнике 3 контрольных вспышек. Таким образом, алгоритм получает треугольник вспышек большого размера вокруг поворотной вспышки. Затем он производит гомотетию отношения K<1 на этом треугольнике по отношению к поворотной вспышке, чтобы получить запас надежности, и подает в источник команду на излучение 3 цветных вспышек, соответствующих 3 вершинам указанного треугольника. Затем алгоритм переходит на этап 4.1 с целью анализа результатов.
Если алгоритм не может охватить поворотную вспышку 3 контрольными вспышками, он выбирает ближайшую контрольную вспышку из базы данных (если эта вспышка является достаточно близкой относительно параметрируемого порога), затем он подает команду на излучение 3 вспышек, как было указано выше, и переходит на этап 4.
Если в базе данных нет ни одной достаточно близкой контрольной вспышки, алгоритм переходит на этап 3.
Этап 3. Переход от поворотной вспышки к первому треугольнику вспышек малого размера
Целью этапа 3 является создание первого треугольника вспышек малого размера при помощи трех точек, первая из которых является выходом датчика для поворотной вспышки (camR%_k, camG%_k, camB%_k).
Алгоритм задает значения (camR%_k, camG%_k, camB%_k), затем генерирует две новые вспышки, при этом первая содержит больше (пропорционально) наименьшей составляющей, а вторая содержит больше вторых наименьших составляющих.
Например, если camG%_k<camR%_k<camB%_k, алгоритм излучает первую вспышку, содержащую больше (пропорционально) зеленой составляющей, затем вторую вспышку, содержащую больше зеленой и больше красной составляющей.
Этап 3.1: Проверка треугольника вспышек малого размера
Целью этапа 3.1 является проверка, чтобы убедиться, что треугольник вспышек малого размера включен в гамут датчика.
Алгоритм сталкивается с 3 возможными случаями:
- Случай 3.1-1: по меньшей мере, одна вспышка выходит из гамута датчика. Алгоритм переходит на этап 3.2.
- Случай 3.1-2: выходы датчика для этих вспышек находятся на одной линии с выходом датчика для поворотной вспышки. Алгоритм объявляет измерение невозможным и прекращает работу, выдавая код ошибки.
Случай 3.1-3: треугольник вспышек малого размера заключен в гамут датчика, и точки не находятся на одной линии. Алгоритм переходит на этап 4.
Этап 3.2: Генерирование нового треугольника вспышек малого размера
Целью этапа 3.2 является генерирование нового треугольника вспышек малого размера путем замены вспышек, при которых выход датчика является выходом гамута датчика.
Алгоритм меняет вспышку или вспышки, которые оказались неудачными, добавляя меньше добавленных составляющих. Алгоритм переходит на этап 3.1 с этой новой базой.
Этап 4: Максимизация размера треугольника вспышек
Целью этапа 4 является построение треугольника вспышек максимального размера для данной точности.
Преобразование f предполагается линейным, и алгоритм определяет это преобразование, благодаря данным 3 точек базы гамута датчика. Алгоритм выводит на их основании подгамут источника-датчика, затем определяет треугольник максимальной площади, включенный в этот подгамут. Затем он производит гомотетию отношения К<1 на этом треугольнике по отношению к поворотной вспышке для получения запаса надежности и подает команду в источник на излучение 3 цветных вспышек, соответствующих 3 вершинам указанного треугольника. После этого алгоритм переходит на этап 4.1 для анализа результатов.
Этап 4.1: Проверка треугольника вспышек порядка к
Целью этапа 4.1 является проверка на предмет того, что треугольник вспышек включен в гамут датчика.
Алгоритм сталкивается с 2 возможными случаями:
- Случай 4.1-1: вершина треугольника выходит из гамута датчика. Алгоритм переходит на этап 4.2.
- Случай 4.1-2: треугольник вспышек считается недостаточно большим, так как, по меньшей мере, одна из его вершин слишком удалена от ближайшей вершины гамута датчика (в рамках эвклидовой нормы в измерительном пространстве), и вспышка, соответствующая этой вершине, слишком удалена также от ближайшей вершины гамута источника. Алгоритм переходит на этап 4.3.
- Случай 4.1-3: треугольник вспышек является удовлетворительным. Алгоритм переходит к фазе 3.
Этап 4.2: Генерирование новой вершины с индексом k+1 треугольника вспышек вследствие выхода вершины с индексом k из гамута датчика
Целью этапа 4.2 является генерирование новой вершины с индексом k+1 треугольника вспышек внутри гамута датчика, отличной от вершины с индексом k и c координатами (camR%k, camG%_k, camB%k).
Алгоритм сталкивается с 2 возможными случаями в зависимости от (camR%k, camG%k, camB%k):
- Случай 4.2-1: Только одна из трех составляющих (camR%k, camG%k, camB%k) является нулевой. В этом случае алгоритм пробует новую поворотную вспышку (k+1) с большей долей обнуленной составляющей. Например, если camR%k<camEps,
dispR%k+1=α*dispR%k,
dispG%k+1=dispG%*(1-α*dispR%k)/(dispG%k+dispB%k),
dispB%k+1=dispB%k*(1-α*dispR%k)/(dispG%k+dispB%k)
при 1<α<1/dispR%k.
Алгоритм переходит на этап 1.1 с этой поворотной вспышкой k+1.
- Случай 4.2-2: Две из трех оставляющих являются нулевыми (camR%k, camG%k, camB%k). В этом случае алгоритм пробует новую поворотную вспышку (k+1) с большей долей двух обнуленных составляющих. Например, если
camR%k<camEps и camG%k<camEps,
dispR%k+1=α*dispRα%k,
dispG%k+1=β*dispG%k,
dispB%k+1=1-α*dispR%k-β*dispG%k,
при α>1, β>1 и α*dispR%k+β*dispG%k<1.
Где α и β являются присваиваемыми весовыми коэффициентами.
Алгоритм переходит на этап 1.1 с этой поворотной вспышкой k+1.
- Случай 4.2-3: алгоритм не может найти новой поворотной вспышки k+1. В этом случае алгоритм объявляет измерение невозможным и прекращает работу, выдавая код ошибки.
Этап 4.3: Генерирование новой вершины треугольника вспышек по причине недостаточного размера треугольника вспышек
Целью этапа 4.3 является увеличение треугольника вспышек, так как, по меньшей мере, одна из его вершин слишком удалена от ближайшей вершины гамута датчика, и вспышка flash_k_1, соответствующая этой вершине, слишком удалена также от ближайшей вершины гамута источника.
Две вспышки, для которых выходы датчика являются двумя другими вершинами треугольника вспышек, обозначены flash_k_2 и flash_k_3.
Алгоритм генерирует две вспышки, соответственно вспышку барицентра системы {(вспышка flash_k_1, α), (вспышка flash_k_2, 1-α)} и вспышку барицентра системы {(вспышка flash_k_1, α), (вспышка flash_k_3, 1-α)} (например: α=0.2). Эти две вспышки и вспышка flash_k_1 образуют треугольник, на которой преобразование f предполагается афинным. Алгоритм определяет это преобразование, благодаря данным трех точек, и выводит на их основании подгамут источника-датчика, затем определяет вершину, которая позволяет получить треугольник вспышек максимальной площади, включенный в этот подгамут. Затем он производит гомотетию отношения К<1 на этой точке по отношению к предыдущей вершине для получения запаса надежности и подает команду в источник на излучение цветной вспышки, соответствующей указанной точке. Если выход датчика выходит из гамута датчика, алгоритм повторяет операцию с более значительным запасом (с меньшим К), в противном случае выход датчика заменяет предыдущую вершину и образует с двумя другими вершинами новый треугольник вспышек. Алгоритм переходит на этап 4.1 с этим новым треугольником вспышек.
Фаза 3: Однородное комплектование числа необходимых нормальных вспышек
Целью фазы 3 является генерирование последовательности из N вспышек, при которой выходы датчика равномерно распределены в треугольнике вспышек, образованном в фазе 2.
Таким образом, алгоритм располагает координатами вершин треугольника вспышек, а также определенным числом промежуточных вспышек, которые позволили определить треугольник вспышек во время фазы 2 (по меньшей мере, одна: поворотная вспышка). Эти точки обозначены (camECMx_k, camECMy_k).
Этап 1: Генерирование решетки из N точек в треугольнике вспышек
Целью этапа 1 является генерирование решетки из N точек, равномерно распределенных в треугольнике вспышек.
Алгоритм генерирует решетку из N точек, распределенных, как описано со ссылками на фиг. 4-8, при значениях N от 1 до 15.
Алгоритм переходит на этап 2 с этой решеткой из N точек в треугольнике вспышек, обозначенных (camECMx_g_k, camECMy_g_k).
Этап 2: Генерирование вспышки
Целью этапа 2 является генерирование вспышек, при которых выход датчика приближается к идеальным точкам, находящимся на решетке, образованной на этапе 1.
Для каждой точки (camECMx_g_k, camECMy_g_k) алгоритм определяет треугольник с вершинами из трех точек, не находящихся на одной линии (camECMx_k, camECMy_k), который минимизирует сумму квадратов расстояний от точки (camECMx_g_k, camECMy_g_k) до вершин треугольника. Эту сумму называют расстоянием до треугольника.
Алгоритм выбирает точку (camECMx_g_k, camECMy_g_k), расстояние от которой до ее треугольника является наименьшим.
На этом треугольнике и вблизи него преобразование f считается линейным, и его определяют, благодаря данным 3 вершин треугольника. Таким образом, алгоритм определяет вспышку (dispECMx_g_k, dispECMy_g_k), при которой выходом датчика будет (camECMx_g_k, camECMy_g_k).
Если выход датчика для вспышки (dispECMx_g_k, dispECMy_g_k) выходит из гамута датчика, вспышку не подтверждают.
Точку (camECMx_g_k, camECMy_g_k) удаляют из списка выбираемых ближайших точек.
Алгоритм сталкивается с 2 возможными случаями:
- Случай 2-1: не остается ни одной выбираемой ближайшей точки (camECMx_g_k, camECMy_g_k). Алгоритм переходит на этап №3 со всеми вспышками, которые были генерированы во время фаз 2 и 3.
- Случай 2-2: остается еще, по меньшей мере, одна выбираемая ближайшая точка (camECMx_g_k, camECMy_g_k). Алгоритм переходит на этап 2 с новым списком точек (camECMx_g_k, camECMy_g_k).
Этап 3: Выбор поворачиваемых вспышек
Алгоритм выбирает только вспышки, для которых выход датчика является достаточно близким от точки решетки, генерированной на этапе 1 (с точки зрения эквлидового расстояния в колориметрическом пространстве измерения). Если две точки находятся достаточно близко от точки решетки, то оставляют только самую близкую точку. После этого алгоритм переходит к фазе 4.
Примечание: если, оставляют, по меньшей мере, одну вспышку, выход датчика которой строго включен в гамут датчика, следовательно, проверяется условие  в интервале [λ1измерение, λ2измерение], используемого при доказательстве обратимости АТ*А в приложении 2.
в интервале [λ1измерение, λ2измерение], используемого при доказательстве обратимости АТ*А в приложении 2.
Фаза 4: излучение вспышки «черная 2»
Целью фазы 4 является контроль постоянности внешнего осветителя во время освещения вспышками.
Алгоритм излучает «черную» вспышку, то есть производит измерение с выключенным источником, то есть dispR%=dispG%=dispB%=0 (и, по возможности, dispBL=0).
Алгоритм сталкивается с 2 возможными случаями:
- Случай 1: Разность значений цветности и яркости, измеренных датчиком цветных изображений, между текущей черной вспышкой и предыдущей черной вспышкой, строго превышает заданный порог. Это значит, что во время вспышек внешний осветитель изменился. Алгоритм прерывает процесс освещения вспышками, генерируя код ошибки.
- Случай 2: Разность значений цветности и яркости, измеренных датчиком цветных изображений, между текущей черной вспышкой и предыдущей черной вспышкой, меньше или равна заданному порогу. Это значит, что во время вспышек внешний осветитель не изменился. Алгоритм возобновляет последовательность из N произведенных нормальных вспышек с входными параметрами источника и выходными параметрами датчика для каждой вспышки.
ПРИЛОЖЕНИЕ 2: ДОКАЗАТЕЛЬСТВО НЕОБРАТИМОСТИ АТ*А
Целью является показать, что AT*A является обратимой в случае, когда в интервале [λ1измерение, λ2измерение] (вспышки охватывают все длины волн, рассматриваемые при определении RОБ(λ) и Iвнеш(λ), и при h=max(λi+1-λi) достаточно малого значения.
Обозначим x собственный вектор, соответствующий собственному значению μ.
С одной стороны, имеем (AT*A*x, x)=(μ*x, x)=μ.(x, x)=μ||x||2
И, с другой стороны: (AT*A*x, A*x)=(A*x, A*x)=||A*x||2
Следовательно, μ=||A*x||2/||x||2
Следовательно, μ является положительным и строго положительным, если А является инъективным.
Таким образом, если А является инъективным, то все собственные значения АT*А являются строго положительными, то есть АT*А является обратимой.
С другой стороны, если АТ*А не является инъективным, существует нулевое x, при котором А*х=0. В этом случае AT*A*x=0, и, следовательно, АТ*А не является обратимой.
Наконец, AT*A является обратимой, если и только если А является инъективным.
Лемма 1: интеграл закрытой кубической сплайн-функции S(λ) с нулевыми наклонами на концах ∫S(λ)*dλ, является всегда положительным, когда все yi являются положительными
Случай №1: если все yi=0
В этом случае s(λ)=0 для всех λ, по причине нулевых наклонов на краях, откуда Int{S(λ)*dλ}=0
Случай №2: если существует одно значение yi>0, а все другие yi являются нулевыми:
y_i создает «положительную пучность» на [λi-1;λi] ∪ [λi;λi+1] (площадь >0) и «отрицательные пучности» на [λi-2;λi-1] и [λi+1;λi+2] (площадь <0), и так далее до самых краев. Поскольку сплайн-функция минимизирует энергию выступа, площадь положительной пучности [λi-1;λi-1] ∪ [λi;λi+1] превышает площади отрицательных пучностей [λi-2;λi] и [λi+1;λi+2]. Это связано с тем, что |pi+1|>|pi+2|>…>|pn|=0 и что |pi-1|>|pi-2|>…>|p0|=0. Площадь положительных пучностей сразу становится больше площади отрицательных пучностей, то есть ∫S(λ)*dλ>0.
Случай №3: если существует два yi>0:
Случай №3.1: yi и yi+1>0 (смежные): Это создает «большую» положительную пучность. Можно применить рассуждение для случая №2.
Случай №3.2: yi и yi+2>0 (yi+1=0): существуют 2 смежных положительных пучности. Можно применить рассуждение для случая №2.
Случай 3.3: yi и yi+3>0 (yi+1=yi+2): имеем 1 положительную пучность, 1 отрицательную пучность, 1 положительную пучность. Можно применить рассуждение для случая №2.
Случай №3.4: yi и yi+k>0 при k>3. Все как в случае №3.3.
Случай №4: если существует, по меньшей мере, 3 yi>0 (общий случай)
В этом случае применимо рассуждение для случая №3. Что и требовалось доказать.
Лемма 2: интеграл закрытой кубической сплайн-функции S(A,) с нулевыми наклонами на концах, умноженный на функцию К(λ)>0 (∫S(λ)*K(λ)*dλ), является всегда положительным, когда все у; являются положительными
Лемму 1 (случай №2) нельзя применить напрямую, так как член К(λ) может сильно уменьшать площадь положительных пучностей и увеличивать площадь отрицательных пучностей.
Поэтому ставится задача увеличения точек интерполяции для уменьшения площади отрицательных пучностей.
Вернемся к случаю №2 леммы 1. Погрешность закрытой сплайн-функции ограничена следующей формулой: |f(x)-s(x)|≤a*h^4 при a=5/384*max[a;b]{|f(4)(E)|}>0 (постоянное значение) и h=max{|xi-xi-1|}.
То есть: f(x)-a*h≤s(x)≤f(x)+a*h
Поскольку f(x)≥0 (RОБ(λ) и IВНЕШ(λ) являются потоками энергии), s(x)≥-a*h, следовательно максимальная площадь отрицательных пучностей [λi-2;λi-1] ∪ [λi+1;λi+2] равна -2*a*h^2.
Площадь положительных пучностей остается постоянной, так как увеличение числа точек интерполяции создает несколько смежных yi>0.
Следовательно, существует h, при котором площадь положительных пучностей строго превышает площадь отрицательных пучностей.
Возвращение к доказательству
Примем x таким, что А*х=0 с x, образованным ординатами закрытых кубических сплайн-функций с нулевыми наклонами на концах, представляющих RОБ(λ) и IВНЕШ(λ).
Докажем, что х=0.
При любом i=1, …, N и при любой чувствительности x/y/z(λ) имеем:
∫ RОБ(λ)*Sисточник(λ)i*x/y/z(λ)*dλ+∫ IВНЕШ(λ)*x/y/z(λ)*dλ=0
где RОБ(λ) и IВНЕШ(λ) являются закрытыми кубическими сплайн-функциями с нулевыми наклонами на концах.
Произведя суммирование по 3*N уравнениям, получаем:

При x(λ)+y(λ)+z(λ)>0 и  для всех λ, из леммы 2 заключают, что существует достаточное малое h, при котором:
для всех λ, из леммы 2 заключают, что существует достаточное малое h, при котором:
 и
и
∫ IВНЕШ(λ)*(x(λ)+y(λ)+z(λ))*dλ=0
так как RОБ(λ)=0 и IВНЕШ(λ)=0 при всех λ,
то есть х=0. А является инъективным. Следовательно, АТ*А является обратимой. Что и требовалось доказать.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ПЕРВИЧНОЙ ПЕРЕРАБОТКИ НЕФТИ В СЛОЖНОЙ РЕКТИФИКАЦИОННОЙ КОЛОННЕ | 1990 |
|
RU2040294C1 |
| СПОСОБ ЦВЕТОКОРРЕКЦИИ СИГНАЛА ИЗОБРАЖЕНИЯ | 1990 |
|
RU2024214C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦВЕТА И НЕЙРОКОЛОРИМЕТР ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2395063C1 |
| УСТРОЙСТВО СОРТИРОВКИ ОБЪЕКТОВ ПО ВИЗУАЛЬНЫМ ПРИЗНАКАМ | 2010 |
|
RU2424859C1 |
| Способ определения координат и параметров движения целей в дальномерной многопозиционной радиолокационной системе | 2020 |
|
RU2759198C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЦВЕТОВЫХ ВЕЛИЧИН В ФОТОМЕТРИИ И КОЛОРИМЕТРИИ | 1994 |
|
RU2087879C1 |
| СПОСОБ РЕГИСТРАЦИИ И ФОРМИРОВАНИЯ СИГНАЛОВ РАЗНОСПЕКТРАЛЬНЫХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2674411C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ РАЗНОСПЕКТРАЛЬНЫХ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 2019 |
|
RU2713716C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЦВЕТА В ПРОИЗВОЛЬНОЙ СИСТЕМЕ КООРДИНАТ | 2012 |
|
RU2491521C1 |
| ВНУТРИСОСУДИСТЫЙ ЛАЗЕРНЫЙ КАТЕТЕР | 1991 |
|
RU2032433C1 |
Изобретение относится к области измерения цвета и касается способа и устройства измерения однородной диффузной отражательной способности. Способ осуществляется с помощью устройства, которое включает в себя средство для излучения цветных осветителей в виде световых потоков и электронный датчик цветных изображений. При проведении измерений исследуемый объект освещают произвольным внешним постоянным окружающим световым потоком и последовательностью цветных осветителей. С помощью датчика изображений принимают отраженный от объекта световой поток. На основе полученных данных получают систему уравнений, связывающую между собой отраженный световой поток, внешний постоянный окружающий световой поток, световой поток от осветителей и диффузную отражательную способность. На основе полученных уравнений определяют диффузную отражательную способность исследуемого объекта и параметры внешнего постоянного окружающего светового потока. Технический результат заключается в повышении точности и упрощении способа измерений. 2 н. и 12 з.п. ф-лы, 8 ил.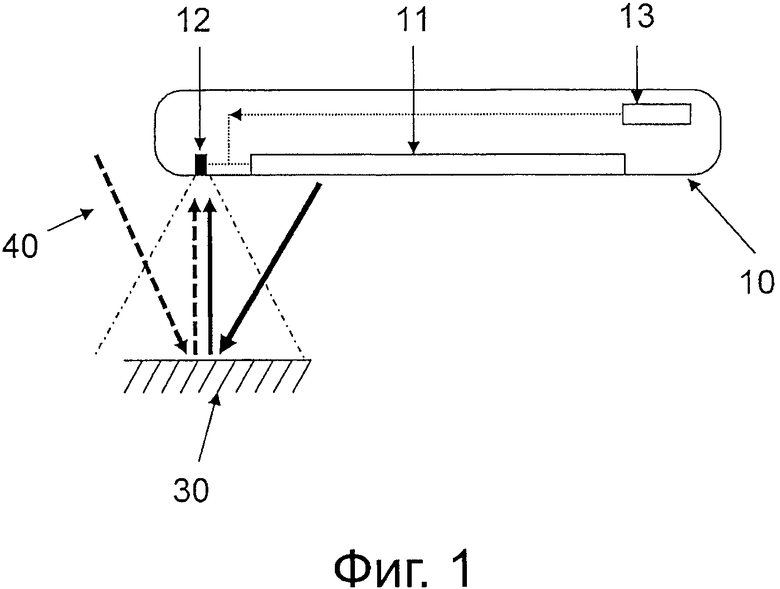
1. Способ измерения однородной диффузной отражательной способности RОБ(λ), по меньшей мере, в одной точке объекта (30), посредством устройства (10), содержащего средство (11), выполненное с возможностью излучения цветных осветителей в виде световых потоков, и электронный датчик (12) цветных изображений, содержащий этапы, на которых:
помещают указанный объект (30) в зону, расположенную напротив и по существу перпендикулярно к указанному средству (11), выполненному с возможностью излучения цветных осветителей в виде световых потоков и расположенному в поле видимости указанного электронного датчика (12) цветных изображений, при этом указанный объект (30) освещается также внешним осветителем в виде неизвестного и постоянного окружающего внешнего светового потока (40) Iвнеш(λ), где λ обозначает длину волны, излучают при помощи указанного средства (11) последовательность из N осветителей Sисточник(λ)i (где N является натуральным целым числом больше единицы, i меняется от 1 до N, и λ является длиной волны), при этом Sисточник(λ)i известен на основании входных параметров указанного средства (11), выполненного с возможностью излучения цветных световых потоков, при этом указанный электронный датчик (12) цветных изображений выполнен с возможностью приема светового потока, отраженного по меньшей мере в одной точке указанного объекта (30) и входящего в датчик, при этом указанный световой поток обозначают Едатчик(λ)i, где N является натуральным целым числом, строго превышающим два, i меняется от 1 до N, и λ является длиной волны, и получают N уравнений «Ei»: Едатчик(λ)i=RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i) с учетом аддитивного характера волнообразного света и по определению однородной диффузной отражательной способности RОБ(λ), по меньшей мере, в одной точке объекта; и
определяют с помощью указанного устройства (10) две непрерывные неизвестные функции RОБ(λ) и Iвнеш(λ), решая систему из N уравнений Ei посредством:
интегрирования каждого уравнения Ei на пересечении спектров источника и датчика, обозначения x, y и z значений чувствительности в выбранной колориметрической базе, при этом каждое уравнение Ei приводит к трем уравнениям «интегрированного Ei»:
∫ Едатчик(λ)i*x(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*x(λ)*dλ
∫ Едатчик(λ)i*y(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*y(λ)*dλ
∫ Едатчик(λ)i*z(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*z(λ)*dλ
вычисления цифрового значения, соответствующего левому члену уравнений интегрированного Ei, при помощи выходных параметров цифрового датчика изображения;
выражения двух непрерывных неизвестных функций RОБ(λ) и Iвнеш(λ) при помощи конечного числа точек интерполяции (λj, yj), связанных по меньшей мере одной функцией интерполяции s(λ), так чтобы сохранить непрерывный характер указанных непрерывных неизвестных функций RОБ(λ) и Iвнеш(λ), при этом λj являются длинами волн, выбранными в пересечении спектров источника и датчика, и являются входными параметрами способа, выбираемыми для минимизации точек интерполяции при заданной точности; и
поиска параметров yj функций RОБ(λ) и Iвнеш(λ), минимизирующих систему наименьших квадратов ||A*X-B||2, вытекающую из уравнений интегрированных Ei.
2. Способ по п. 1, дополнительно содержащий этап, на котором определяют значения внешнего осветителя Iвнеш(λ).
3. Способ по п. 1, дополнительно содержащий этап, на котором осуществляют транскрипцию функции RОБ(λ) однородной диффузной отражательной способности по меньшей мере в одной точке объекта в координатах CIE XYZ при данном осветителе.
4. Способ по п. 1 или 2, в котором число цветных осветителей в виде световых потоков имеет такой же порядок величины, что и число точек интерполяции, для определения значений однородной диффузной отражательной способности RОБ(λ) по меньшей мере в одной точке объекта (30) и внешнего осветителя Iвнеш(λ).
5. Способ по п. 1 или 2, содержащий этап, на котором определяют значения однородной диффузной отражательной способности RОБ(λ), по меньшей мере в одной точке объекта (30), и определяют внешний осветитель Iвнеш(λ) во множестве спектральных диапазонов.
6. Способ по п. 1, в котором указанное устройство (10) выполнено с возможностью использования экрана для излучения цветных осветителей в виде световых потоков и электронного датчика изображения для приема света, отраженного объектом-мишенью.
7. Способ по п. 1, в котором указанное устройство (10) является фотоаппаратом или камерой с встроенной или съемной вспышкой.
8. Способ по п. 1, в котором указанное устройство (10) выполнено с возможностью использования волноводов для направления излучения и приема цветных осветителей в виде световых потоков.
9. Способ по п. 1, характеризующийся тем, что его применяют для получения спектрометрических фотографий объекта и для реализации хроматических адаптаций (баланса белого) по мере необходимости.
10. Способ по п. 1, характеризующийся тем, что его применяют для измерения цвета элемента, входящего в следующую группу: материалы, твердые тела, жидкости, газы, краски, обои, графические формы, текстиль, пластики, дерево, металлы, грунт, минералы, растения и пищевые продукты.
11. Способ по п. 1, характеризующийся тем, что его применяют для измерения в медицинских или косметических целях на человеке и живых существах цветов, по меньшей мере, одного элемента, входящего в следующую группу: кожа, прыщи, родинки, волосы на голове и на теле, макияж и зубы.
12. Способ по п. 1, характеризующийся тем, что его применяют при использовании одномерных или многомерных цветных штрихкодов.
13. Способ по п. 1, характеризующийся тем, что его применяют для оказания помощи дальтоникам и/или слепым.
14. Устройство (10), содержащее средство (11), выполненное с возможностью излучения цветных осветителей в виде световых потоков, и электронный датчик (12) цветных изображений, для измерения однородной диффузной отражательной способности RОБ(λ), по меньшей мере, в одной точке объекта, помещенного в зону, находящуюся напротив и по существу перпендикулярно к указанному средству (11), выполненному с возможностью излучения цветных осветителей в виде световых потоков и находящемуся в поле видимости указанного электронного датчика (12) цветных изображений, и освещаемого также внешним осветителем в виде неизвестного и постоянного окружающего внешнего светового потока (40), обозначаемого Iвнеш(λ), при этом устройство содержит средства для:
излучения последовательности из N осветителей Sисточник(λ)i (где N является натуральным целым числом строго больше двух, i меняется от 1 до N, и λ является длиной волны), при этом Sисточник(λ)i известен на основании входных параметров указанного средства (11), выполненного с возможностью излучения цветных световых потоков, при этом указанный электронный датчик (12) цветных изображений принимает световой поток, отраженный по меньшей мере в одной точке указанного объекта (30) и входящий в датчик, при этом указанный световой поток обозначают Едатчик(λ)i, где N является натуральным целым числом больше единицы, i меняется от 1 до N, и λ является длиной волны, и получают N уравнений (Еi): Едатчик(λ)i=RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i) с учетом аддитивного характера волнообразного света и по определению однородной диффузной отражательной способности RОБ(λ) по меньшей мере в одной точке объекта (30); и
определения двух непрерывных неизвестных функций RОБ(λ) и Iвнеш(λ) посредством решения системы из N уравнений Ei посредством:
интегрирования каждого уравнения Ei на пересечении спектров источника и датчика, обозначения x, y и z значений чувствительности в выбранной колориметрической базе, при этом каждое уравнение Ei приводит к трем уравнениям «интегрированного Ei»:
∫ Едатчик(λ)i*x(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*x(λ)*dλ
∫ Едатчик(λ)i*y(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*y(λ)*dλ
∫ Едатчик(λ)i*z(λ)*dλ=∫ RОБ(λ)*(Iвнеш(λ)+Sисточник(λ)i)*z(λ)*dλ
вычисления цифрового значения, соответствующего левому члену уравнений интегрированного Ei, при помощи выходных параметров цифрового датчика изображения;
выражения двух непрерывных неизвестных функций RОБ(λ) и Iвнеш(λ) при помощи конечного числа точек интерполяции (λj, yj), связанных по меньшей мере одной функцией интерполяции s(λ), так чтобы сохранить непрерывный характер указанных непрерывных неизвестных функций RОБ(λ) и Iвнеш(λ), при этом λj являются длинами волн, выбранными в пересечении спектров источника и датчика, и являются входными параметрами способа, выбираемыми для минимизации точек интерполяции при данной точности; и
изыскивая осуществление поиска параметров yj кривых RОБ(λ) и Iвнеш(λ), минимизирующих систему наименьших квадратов ||A*X-B||2, вытекающую из уравнений интегрированных Ei.
| WO 2008075266 A2, 26.06.2008 | |||
| WO 1999030137 A1, 17.06.1999 | |||
| US 7443506 B2, 28.10.2008 | |||
| СПОСОБ ИЗМЕРЕНИЯ ЦВЕТА ОБЪЕКТОВ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2312314C2 |

