Изобретение может быть использовано в радиолокационных и радионавигационных системах для определения местоположения объектов.
Известен способ радиолокационного обзора пространства и многопозиционный комплекс для его осуществления (см. 1. Патент РФ на изобретение №2667405, МПК G01S 13/04, опубл. 20.09.2018.), сущность которого заключается в подсветке пространства с помощью двух и более передающих модулей, приеме отраженных сигналов с помощью двух и более приемных модулей, определении пеленгов на цель и передаче их на центр обработки информации и управления (ЦОУ), а обзор пространства осуществляют с помощью передающих узкополосных и приемных модулей, при обнаружении признаков движущейся цели определяют пеленг на нее. измеряют ее доплеровскую скорость, передают информацию на ЦОУ. с помощью широкополосных передающих и приемных модулей и по данным ЦОУ осматривают пеленги только в направлениях, где обнаружены признаки движущейся цели.
Однако в данном способе на части позиций не измеряются дальности до цели и не используется информация о координатах целей, заложенная в суммарных измерениях и суммарном доплеровском сдвиге частоты, что приводит к снижению точности определения параметров движущейся цели.
Известен способ пространственной селекции расстояний при решении задачи позиционирования мобильного средства дальномерным методом в наземной локальной радионавигационной системе (ЛРНС) (см. 2. Патент РФ на изобретение №2644762, МПК G01S 5/04, опубл. 14.02.2018.), в котором осуществляется пространственная селекция расстояний в наземной локальной радионавигационной системе (ЛРНС) между мобильным средством (МС) и опорными станциями ЛРНС, заключающийся в том, что измеряют расстояния от мобильного средства с неизвестными координатами до опорных станций ЛРНС с известными координатами, отличающийся тем, что осуществляют фильтрацию измеренных расстояний в медианных фильтрах, передают их в блоки вычисления разностей, осуществляющие вычисление погрешностей между исходными расстояниями и их оценкой после фильтрации, с последующей передачей полученных погрешностей в блок управления селекцией для вычисления наибольшей погрешности и формированием команды управления ключом на отключение данной i-й линии, предотвращающее передачу оценок расстояний с наибольшими погрешностями в блок расчета координат МС.
Однако в данном способе расчет координат объекта осуществляется неитеративным решением системы нелинейных уравнений только по измеренным расстояниям, а информация о координатах объектов, заложенная в суммарно-дальномерных измерениях и измерениях доплеровских частот, не используется, что снижает точность определения координат объекта.
Известен также способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов (см. 3. Патент РФ на изобретение №2713498, МПК G01S 13/42, H01Q 21/00. опубл. 05.02.2020.), реализующий высокоточное определение координат и траекторий перемещающихся в пространстве воздушно-космических объектов в расширенной рабочей зоне за счет разработки операций способа многопозиционной активно-пассивной радиолокации и вывода математических соотношений, позволяющих определить значения модулей скорости движения объектов, их пространственных курсовых углов и углов пикирования (кабрирования), а также за счет определения структуры и порядка функционирования РЛС, реализующей способ обзорной активно-пассивной латерационной радиолокации воздушно -космических объектов.
Однако в данном способе при получении оценок прямоугольных координат не учитывается совокупность измерений наклонной и суммарной дальности, радиальной скорости и скорости изменения суммарной дальности, что приводит к снижению точности определения координат.
Известен способ определения координат цели в трехпозиционной дальномерной радиолокационной системе (см. 4. Патент РФ на изобретение №2515571, МПК G01S 13/46, опубл. 10.05.2014), включающий на каждой позиции излучение зондирующих сигналов, прием отраженных от цели сигналов, излученных этой позицией, измерение по принятым сигналам дальности от этой позиции до цели, определение координат цели, при этом на каждой позиции дополнительно измеряют скорости изменения дальности, принимают отраженные от цели сигналы, излученные двумя другими позициями, разделяют принятые сигналы по принадлежности к излучившей их позиции, измеряют по принятым сигналам две суммы дальностей и скорости их изменения от этой позиции до цели и от цели до двух других позиций и три попарные разности дальностей и скорости их изменения от первой, второй и третьей позиций до цели, передают сигналы, соответствующие измеренным значениям дальности и скоростям их изменения, суммы и разности дальностей и скорости их изменения на две другие позиции, измеряют три разности сумм расстояний и скорости их изменения между позициями системы, вычисляют уточненные значения дальности и скорости их изменения от первой, второй и третьей позиций до цели по соответствующим формулам с последующим расчетом прямоугольных координат цели и скорости их изменения.
Однако в данном способе не учитывается при формировании измерений доплеровских сдвигов частот вся возможная совокупность перемещений приемопередающих позиций объектов в многопозиционной радиолокационной системе, что приводит к снижению точности измерений пространственных координат целей и скорости их изменения.
Данный способ выбран в качестве прототипа.
Техническим результатом заявляемого изобретения является повышение точности определения пространственных координат целей и скорости их в многопозиционной радиолокационной системе при взаимном перемещении приемо-передающих позиций и целей.
Технический результат достигается тем, что в способе определения координат и параметров движения целей в дальномерной многопозиционной радиолокационной системе осуществляют на каждой позиции излучение зондирующих сигналов, прием отраженных от цели сигналов, излученных этой позицией, измерение по принятым сигналам дальности от этой позиции до цели, при этом на каждой позиции дополнительно измеряют радиальные скорости цели, принимают отраженные от цели сигналы, излученные другими позициями, разделяют принятые сигналы по принадлежности к излучившей их позиции, измеряют по принятым сигналам суммы дальностей и скорости их изменения от этой позиции до цели и от цели до других позиций, согласно изобретению определяют прямоугольные координаты расположения каждой из позиций, определяют скорости изменения прямоугольных координат каждой из позиций, передают сигналы, соответствующие измеренным значениям дальностей, радиальных скоростей, суммарных дальностей и скоростей их изменения, прямоугольных координат расположения каждой из позиций и скорости их изменения на каждой из позиций на центральный пункт обработки, где вычисляют уточненные значения дальностей и радиальных скоростей относительно каждой из позиций, вычисляют прямоугольные координаты целей и скорости их изменения по формулам, позволяющим определить уточненные значения наклонных дальностей до цели относительно каждой из РЛС, входящих в систему, по результатам измерений наклонных дальностей и сумм расстояний
где:
 - матрица (вектор - строка) искомых уточненных значений оценок дальностей размерностью 1×N,
- матрица (вектор - строка) искомых уточненных значений оценок дальностей размерностью 1×N,
Λ=diag[λl, λi, …, λn - диагональная матрица размерностью n×n,
А - матрица коэффициентов при неизвестных размерностью N×n,
N - число РЛС в системе,
n=N2,
А - матрица коэффициентов при неизвестных размерностью N×n,
 - матрица (вектор-строка) первичных измерений дальномерных параметров,
- матрица (вектор-строка) первичных измерений дальномерных параметров,
 - наклонные дальности до цели соответственно относительно i-ой позиции,
- наклонные дальности до цели соответственно относительно i-ой позиции,
 при
при  - суммарные дальности до цели относительно i-ой и j-ой позиций,
- суммарные дальности до цели относительно i-ой и j-ой позиций,
рассчитывают уточненные значения радиальных скоростей целей относительно каждой из РЛС входящих в систему по результатам измерений радиальных скоростей и скоростей изменения суммарных дальностей
 - матрица (вектор - строка) искомых оценок уточненных значений размерностью 1×N,
- матрица (вектор - строка) искомых оценок уточненных значений размерностью 1×N,
 - матрица (вектор-строка) первичных измерений скорости изменения дальномерных параметров,
- матрица (вектор-строка) первичных измерений скорости изменения дальномерных параметров,
 - радиальная скорость цели,
- радиальная скорость цели,
 скоростей изменения суммарных дальностей,
скоростей изменения суммарных дальностей,
λi - длина волны РЛС,
рассчитывают прямоугольные координаты цели X, Y, Н
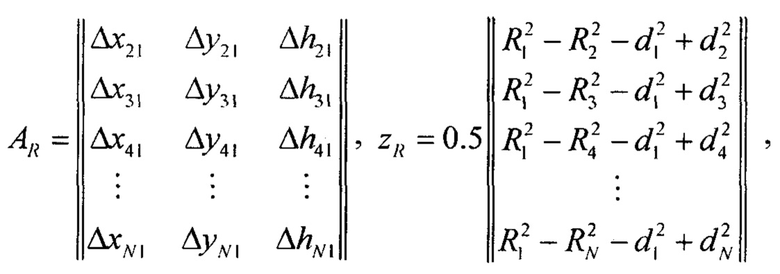
где
где Δxij=xi-xj, Δyij=yi-yj, Δhij=hi-hj,  , xi, yi, hi - прямоугольные координаты РЛС,
, xi, yi, hi - прямоугольные координаты РЛС,
определяют проекции вектора скорости цели на оси прямоугольной системы координат 

где:

осуществляют вычисление вектора скорости цели по формуле
Сущность изобретения раскрывается с помощью фигур 1-5.
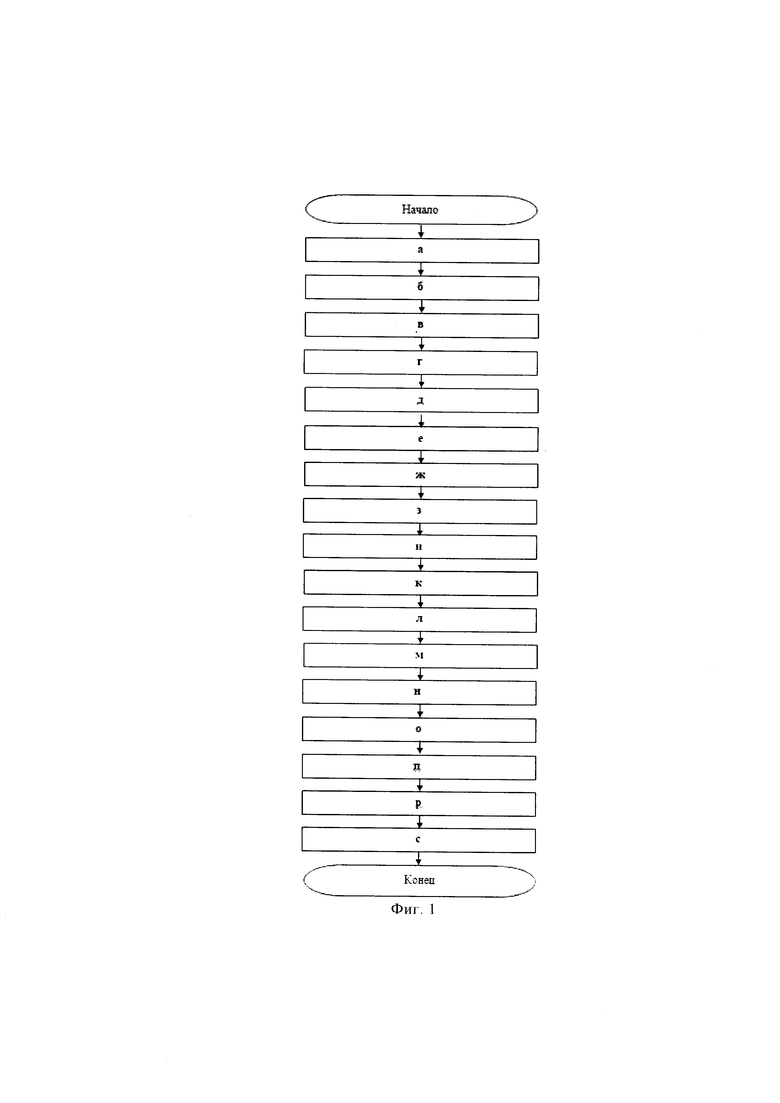
На фиг. 1 изображена блок-схема алгоритма для осуществления способа;
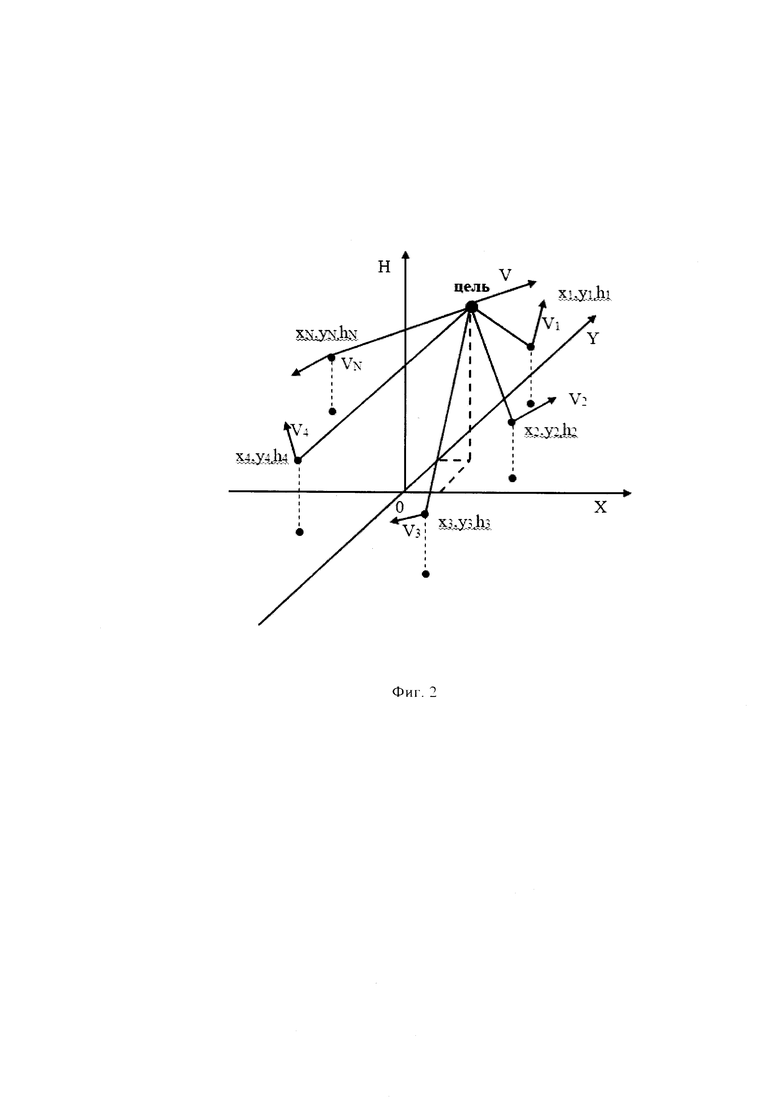
на фиг. 2 - геометрия расположения позиций РЛС в пространстве;
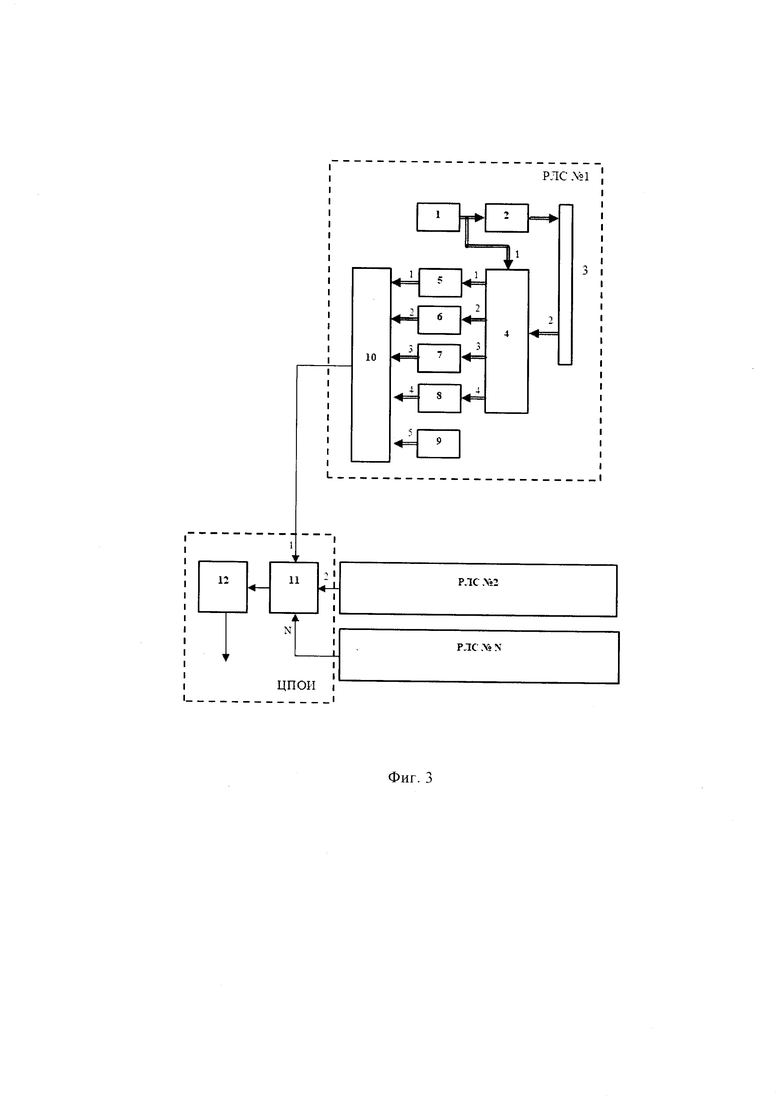
на фиг. 3 приведена структурная схема устройства для реализации заявляемого способа;
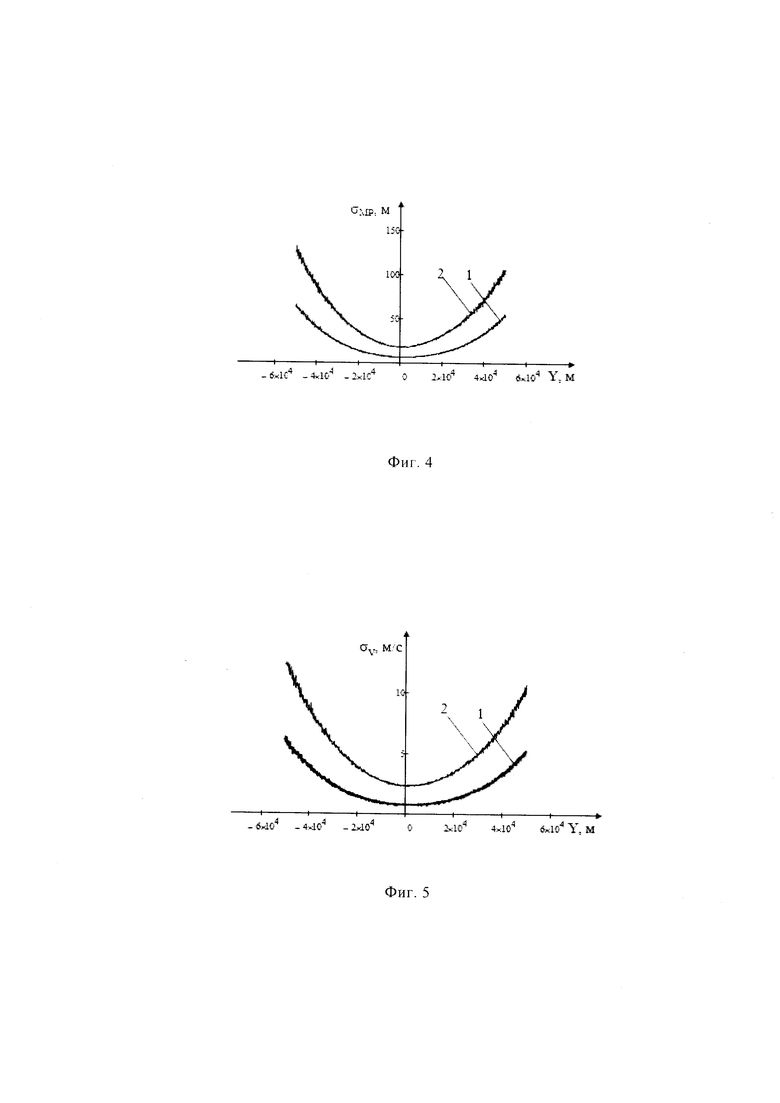
на фиг. 4 - значения среднеквадратических ошибок (СКО) определения прямоугольных координат предлагаемым способом;
на фиг. 5 - значения СКО определения скорости цели предлагаемым способом.
Способ включает следующие основные операции на каждой позиции системы (фиг. 1):
(а) - излучение сигналов каждой РЛС;
(б) - прием отраженных от цели сигналов, излученных каждой РЛС;
(в) - прием отраженных от цели сигналов, излученных другими РЛС системы;
(г) - разделение принятых сигналов по принадлежности к излучившей их РЛС;
(д) - измерение по принятым сигналам дальности от этой РЛС до цели;
(е) - измерение по принятым сигналам других РЛС сумм дальностей от этой РЛС до цели и от цели до других позиций;
(ж) - измерение по принятым сигналам радиальных скоростей целей;
(з) - измерение скоростей изменения сумм дальностей от этой РЛС до цели и от цели до других РЛС;
(и) - измерение координат расположения РЛС входящих в систему;
(к) - измерение скорости изменения координат перемещения РЛС входящих в систему;
(л) - передача измеренных сигналов, соответствующих дальностям, суммам расстояний, радиальным скоростям, скоростям изменений суммарных дальностей, координат расположения РЛС и скоростей их изменения на центральный пункт обработки;
(м) - анализ количества измерений дальномерных параметров и скоростей их изменения, формирование матрицы количества измерений принятых к анализу Λ и матрицы при неизвестных параметрах А;
(н) - вычисление уточненных значений наклонных дальностей до цели относительно каждой из РЛС входящих в систему по результатам измерений наклонных дальностей и сумм расстояний;
(о) - вычисление уточненных значений радиальных скоростей целей относительно каждой из РЛС входящих в систему по результатам измерений радиальных скоростей и скоростей изменения суммарных дальностей;
(п) - определение прямоугольных координат цели;
(р) - определение проекций вектора скорости цели на оси прямоугольной системы координат;
(с) - определение вектора скорости цели.
Предлагаемый способ определения координат и параметров движения целей согласно расположению позиций РЛС в пространстве (фиг. 2) дальномерной многопозиционной радиолокационной системой, приведенной на фиг. 3, может быть реализован на базе идентичных многочастотных многоканальных РЛС, связанных с центральным пунктом обработки измерений (ЦПОИ) системой связи и передачи данных (ССПД).
На фиг. 3 показаны:
1 - система синхронизации;
2 - многочастотный передатчик;
3 - фазированная антенная решетка (ФАР);
4 - многочастотный многоканальный приемник;
5 - измеритель наклонной дальности;
6 - измеритель сумм расстояний;
7 - измеритель радиальной скорости;
8 - измеритель скорости изменения сумм расстояний;
9 - измеритель местоположения РЛС и скорости ее изменения;
10 - система связи и передачи данных РЛС;
11 - система связи и передачи данных ЦПОИ;
12 - вычислительное устройство ЦПОИ.
При этом первый выход системы 1 синхронизации соединен со входом многочастотного передатчика 2, выход которого соединен со входом фазированной антенной решетки 3, выход которой соединен со вторым входом многочастотного многоканального приемника 4, первый вход которого соединен с выходом системы 1 синхронизации, первый, второй, третий и четвертый выходы многочастотного многоканального приемника 4 соединены соответственно со входами измерителя 5 наклонной дальности, измерителя 6 сумм расстояний, измерителя 7 радиальной скорости, измерителя 8 скорости изменения наклонной дальности, выходы которых соединены соответственно с первым, вторым, третьим и четвертым входами системы 10 связи и передачи данных РЛС, измеритель 9 местоположения РЛС и скорости ее изменения подключен к пятому входу системы 10 связи и передачи данных РЛС, выходы которой от каждой из РЛС соединены с соответствующими входами системы 11 связи и передачи данных ЦПОИ, которая выходом соединена со входом вычислительного устройства ЦПОИ 12, выход которого является выходом системы.
Способ осуществляется следующим образом.
Многопозиционная радиолокационная система состоящая из N приемо - передающих позиций измеряет N наклонных R1, R2 … RN и N(N-1)суммарных дальностей RΣ12, RΣ21, RΣN(N-1) что обеспечивает n=N2 измерений дальномерных параметров.
Система линейных алгебраических уравнений соответствующая рассматриваемым дальномерным измерениям может быть записана в виде:
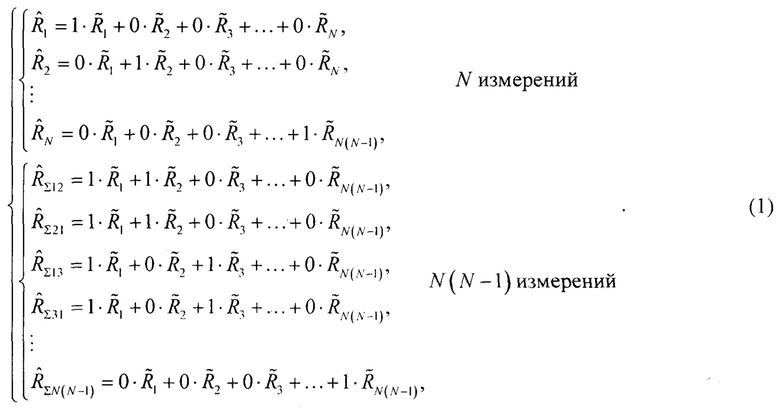
где  - наклонные дальности до цели соответственно относительно i-ой позиции;
- наклонные дальности до цели соответственно относительно i-ой позиции;
 - суммарные дальности до цели относительно i-ой и j-ой позиций.
- суммарные дальности до цели относительно i-ой и j-ой позиций.
В матричной форме записи система уравнений (1) примет вид

где:  - матрица (вектор-строка) первичных измерений размерностью 1×n;
- матрица (вектор-строка) первичных измерений размерностью 1×n;
А - матрица коэффициентов при неизвестных размерностью N×n;
 - матрица (вектор - строка) искомых уточненных значений оценок дальностей размерностью 1×N.
- матрица (вектор - строка) искомых уточненных значений оценок дальностей размерностью 1×N.
Поскольку обнаружение цели носит стохастический характер, то возможны ситуации, когда на какой либо из РЛС в каком либо из приемных каналов или группе РЛС возникнут ситуации пропуска цели. Эту можно учесть введением диагональной матрицы размерностью n×n Λ=diag[λl, λi, …, λn],  учитывающую наличие или отсутствие соответствующих дальномерных или суммарно-дальномерных измерений. Если i-e измерение используется в решении задачи, то λi=1 если не используется, то λi=0. Фактически матрица Λ есть матрица количества измерений принятых к анализу в текущем цикле обработки измерений.
учитывающую наличие или отсутствие соответствующих дальномерных или суммарно-дальномерных измерений. Если i-e измерение используется в решении задачи, то λi=1 если не используется, то λi=0. Фактически матрица Λ есть матрица количества измерений принятых к анализу в текущем цикле обработки измерений.
Применив к (2) метод наименьших квадратов (МНК), получим

Применительно к пятипозиционной МПРЛС, транспонированная матрица коэффициентов при неизвестных параметрах примет вид

С учетом (1), (3) и (4) получим уточненные значения дальностей
Измеряя доплеровские частоты относительно каждой из позиций  и доплеровский сдвиг частоты образованный скоростью изменения суммарных дальностей
и доплеровский сдвиг частоты образованный скоростью изменения суммарных дальностей  получим значения соответствующих радиальных скоростей
получим значения соответствующих радиальных скоростей  и скоростей изменения суммарных дальностей
и скоростей изменения суммарных дальностей  λi - длина волны РЛС.
λi - длина волны РЛС.
Подстановка которых в формулу

где:
 - матрица (вектор-строка) первичных измерений радиальных скоростей и скоростей изменения суммарных дальностей размерностью 1×n;
- матрица (вектор-строка) первичных измерений радиальных скоростей и скоростей изменения суммарных дальностей размерностью 1×n;
 - матрица (вектор - строка) искомых оценок уточненных значений размерностью 1×N;
- матрица (вектор - строка) искомых оценок уточненных значений размерностью 1×N;
позволит получить выражения:
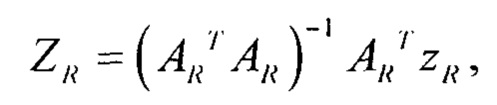
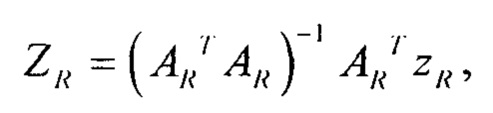
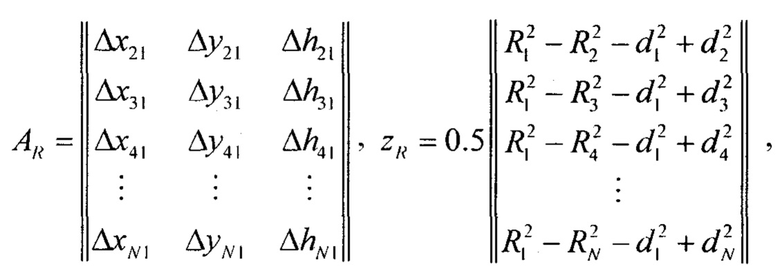
Для определения прямоугольных координат рассмотрим N нелинейных уравнений связывающих искомые координаты объекта локации с известными координатами расположения РЛС

Прямоугольные координаты цели определим методом наименьших квадратов (МНК)

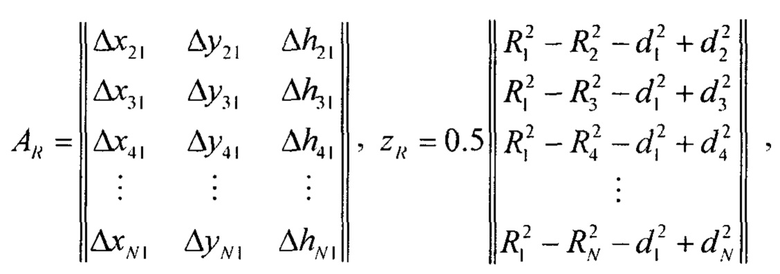
здесь
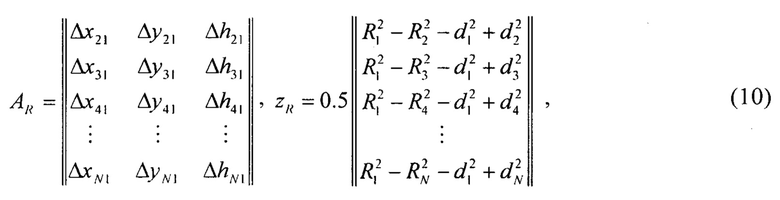
где Δxij=xi-xj, Δyij=yi-yj, Δhij=hi-hj, а  - расстояние от начала координат до i-й позиции.
- расстояние от начала координат до i-й позиции.
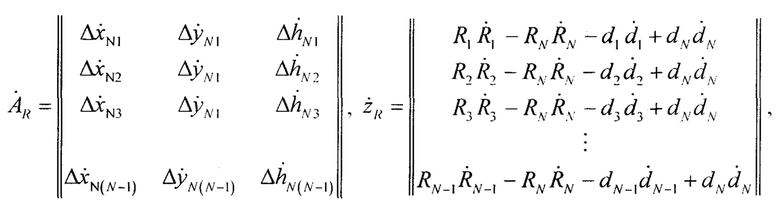
Проекции вектора скорости цели на оси декартовой системы координат получим дифференцируя (9) по времени

где:
 - проекции вектора скорости цели на оси декартовой системы координат;
- проекции вектора скорости цели на оси декартовой системы координат;
 скорость изменения расстояния между позициями по соответствующим прямоугольным координатам,
скорость изменения расстояния между позициями по соответствующим прямоугольным координатам,  - скорости изменения местоположения РЛС, а
- скорости изменения местоположения РЛС, а  - скорость удаления РЛС от начала координат.
- скорость удаления РЛС от начала координат.
На основании результатов вычислений по (11) можно получить значение вектора скорости цели:
Как следует из (9) и (11) определение координат и проекций вектора скорости объекта локации на оси декартовой системы координат возможно за один цикл обработки измерений наклонных дальностей, радиальных скоростей, суммарных дальностей и скоростей их изменения без учета ограничений на гипотезу движения объекта локации, при этом учитываются все возможные дальномерные, суммарно-дальномерные измерения и соответствующие им доплеровские сдвиги частот, что позволяет учесть всю совокупность измерений в системе.
Каждая из РЛС системы излучает сигналы, принимает отраженные целью сигналы, излученные как этой позицией, так и другими РЛС системы, разделяет принятые сигналы по принадлежности к излучившим их позициям (операции (а), (б), (в), (г) алгоритма) и производит по ним независимые измерения дальностей (операция (г)), осуществляется независимые измерения сумм дальностей (операция (е)), т.е. формируется  - матрица (вектор-строка) первичных измерений дальномерных параметров, осуществляются также независимые измерения радиальных скоростей (операция (ж)), и скоростей их изменения (операция (з)) т.е. формируется
- матрица (вектор-строка) первичных измерений дальномерных параметров, осуществляются также независимые измерения радиальных скоростей (операция (ж)), и скоростей их изменения (операция (з)) т.е. формируется  матрица (вектор-строка) первичных измерений скорости изменения дальномерных параметров.
матрица (вектор-строка) первичных измерений скорости изменения дальномерных параметров.
Осуществляется измерение координат расположения РЛС входящих в систему xi, yi, hi, (операция (и) способа).
Осуществляется измерение скорости изменения координат перемещения РЛС входящих в систему  - (операция (к) способа).
- (операция (к) способа).
Осуществляется передача измеренных сигналов, соответствующих дальностям, суммам расстояний, радиальным скоростям, скоростям изменений суммарных дальностей, координат расположения РЛС и скоростей их изменения на центральный пункт обработки (операция (л) способа).
Производится анализ количества измерений дальномерных параметров и скоростей их изменения, формирование матрицы количества измерений принятых к анализу Λ=diag[λl, λi, …, λn] и матрицы при неизвестных параметрах А (операция (м) способа).
Осуществляется вычисление уточненных значений наклонных дальностей до цели относительно каждой из РЛС входящих в систему по результатам измерений наклонных дальностей и сумм расстояний по формуле (операция (н) способа)
Осуществляется вычисление уточненных значений радиальных скоростей целей относительно каждой из РЛС входящих в систему по результатам измерений радиальных скоростей и скоростей изменения суммарных дальностей (операция (о) способа) по формулам
Осуществляется вычисление прямоугольных координат цели (операция (п) способа) по формулам
где Δxij=xi-xj, Δyij=yi-yj, Δhij=hi-hj, 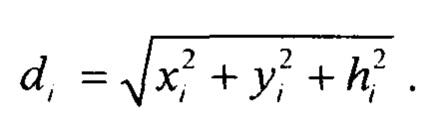
Осуществляется вычисление проекций вектора скорости цели на оси прямоугольной системы координат (операция (р) способа) по формулам

 - скорость удаления (приближения) РЛС от начала координат.
- скорость удаления (приближения) РЛС от начала координат.
Осуществляется вычисление вектора скорости цели (операция (с) способа) по формуле 
Система синхронизации 1 РЛС формирует требуемые длительности и период повторения зондирующих импульсов.
Многоканальный передатчик 2 генерирует СВЧ сигналы на соответствующей сетке частот и посредством фазированной антенной решетки (ФАР) 3 излучает их в пространство, аналогичные процессы происходят на остальных РЛС системы реализуя таким образом операцию (а) способа - излучение сигналов.
Отраженные от цели сигналы принимаются фазированной антенной решеткой (ФАР) 3 и далее поступают на второй вход многочастотного многоканального приемника 4, который осуществляет прием и обработку сигналов, выделяя таким образом сигналы целей, реализуя операцию (б) способа, кроме того, ФАР 3 принимает сигналы целей, облученные другими позициями системы, а многоканальный приемник 4 осуществляет их прием и обработку, реализуя операцию (в) способа - прием отраженных от цели сигналов, излученных другими позициями.
Система синхронизации 1 по первому входу многочастотного многоканального приемника 4 осуществляет его временные режимы работы, выполняя операцию (г) способа - разделение принятых сигналов по принадлежности к излучившей их РЛС.
Первый выход многоканального многочастотного приемника 4 соединен со входом измерителя 5 наклонной дальности (реализуя таким образом процедуру (д) - измерение по принятым сигналам дальности от РЛС до цели), второй выход многоканального многочастотного приемника 4 соединен со входом измерителя 6- со входом измерителя 6 сумм расстояний, измеряющие суммарные дальности относительно других РЛС системы (реализуя таким образом процедуру (е) - измерение по принятым сигналам других РЛС сумм дальностей от этой РЛС до цели и от цели до других позиций).
Измеритель радиальной скорости 7 и измеритель скорости изменения сумм расстояний - 8 соединенные соответственно с третьим и четвертым выходами многоканального многочастотного приемника 4 реализуют операции (ж) - измерение по принятым сигналам радиальных скоростей целей и (з) - измерение скоростей изменения сумм дальностей от этой РЛС до цели и от цели до других РЛС.
Измеритель местоположения РЛС и скорости ее изменения 9 (реализуя, таким образом, операцию (и) - измерение координат расположения РЛС входящих в систему и (к) - измерение скорости изменения координат перемещения РЛС входящих в систему).
Система связи и передачи данных РЛС 10 и система связи и передачи данных ЦПОИ 11 осуществляют (передачу измеренных сигналов, соответствующих дальностям, суммам расстояний, радиальным скоростям, скоростям изменений суммарных дальностей, координат расположения РЛС и скоростей их изменения на центральный пункт обработки реализуя, таким образом, процедуру (л) способа).
Вычислительное устройство ЦПОИ реализует следующие процедуры способа: (м) - анализ количества измерений дальномерных параметров и скоростей их изменения, формирование матрицы количества измерений принятых к анализу Л и матрицы при неизвестных параметрах А; (н) - вычисление уточненных значений наклонных дальностей до цели относительно каждой из РЛС входящих в систему по результатам измерений наклонных дальностей и сумм расстояний; (о) - вычисление уточненных значений радиальных скоростей целей относительно каждой из РЛС входящих в систему по результатам измерений радиальных скоростей и скоростей изменения суммарных дальностей; (п) - определение прямоугольных координат цели; (р) - определение проекций вектора скорости цели на оси прямоугольной системы координат; (с) - определение вектора скорости цели.
На фиг. 4 приведены среднеквадратические ошибки (СКО) определения местоположения цели примере системы, реализующей предлагаемый способ, включающей пять приемо-передающих позиций, где кривая 1 соответствует значению для существующего способа, а кривая 2 для прототипа.
На фиг. 5 приведены СКО определения вектора скорости цели примере системы, реализующей предлагаемый способ, включающей пять приемо-передающих позиций, где кривая 1 соответствует значению для существующего способа, а кривая 2 - значению для прототипа.
Значения СКО измерений дальностей σR, сумм расстояний σRΣ, радиальных скоростей  и скорости изменения суммарных дальностей
и скорости изменения суммарных дальностей  моделировались как зависящие от отношения сигнал/шум с учетом инструментальных ошибок. Значения ошибок в зависимости от местоположения цели изменялись в пределах σR=3÷52 м, σRΣ=5÷92 м,
моделировались как зависящие от отношения сигнал/шум с учетом инструментальных ошибок. Значения ошибок в зависимости от местоположения цели изменялись в пределах σR=3÷52 м, σRΣ=5÷92 м,  .
.
Среднеквадратические ошибки определения местоположения цели а и вектора ее скорости (Ту соответственно равны:  где σX, σY - СКО определения прямоугольных координат
где σX, σY - СКО определения прямоугольных координат  где
где  - СКО определения проекций вектора скорости цели на оси прямоугольных координат.
- СКО определения проекций вектора скорости цели на оси прямоугольных координат.
Анализ графиков приведенных на фиг. 4 и 5, показывает СКО определения прямоугольных координат, в зависимости нахождения цели в пространстве уменьшается в 1.55-2.5 раза, а СКО определения вектора скорости на оси прямоугольных координат цели в 1.8-2.4 раза.
Физической основой выигрыша в точности заявляемого способа по сравнению с прототипом является кратное количеству РЛС увеличение количества обрабатываемых измерений (с двадцати одного до N2), и возникающая вследствие этого значительная избыточность данных по отношению к минимально необходимой.
Таким образом, совокупность существенных признаков способа обеспечивает достижение требуемого технического результата, а именно повышение точности определения координат цели и скорости их изменения в многопозиционной дальномерной радиолокационной системе при взаимном перемещении позиций.
Использование данного способа в радиолокационных системах позволит повысить их точность, обеспечить устойчивость и надежность функционирования в сложных условиях радиоэлектронной обстановки.
Возможность технического осуществления изобретения с реализацией указанного назначения подтверждается следующими сведениями.
Фазированная антенная решетка может быть выполнена как в (см. 5. Активные фазированные антенные решетки. Гостюхин В.Л., Трусов В.Н., Гостюхин А.В. - М.: Радиотехника, 2011, стр. 20, рис. 1.3).
Многоканальное радиопередающее устройство можно реализовать также как в (см. 6. Активные фазированные антенные решетки. Под ред. Д.И. Воскресенского и А.И. Канащенкова. - М.: Радиотехника, 2004) на основе многоканального приемопередающего модуля АФАР (стр. 34, рис. 2.3).
Многочастотный многоканальный приемник можно также представить в виде отдельных модулей, принимающих и обрабатывающих сигналы на соответствующих частотах, например, как (см. 7. Справочник по учебному проектированию приемно-усилительных устройств. Белкин М.К., Белинский В.Т., Мазор Ю.Л., Терещук P.M. - К.: - Выща школа, 2-е издание. 1988 г., стр. 405, рис. 14.1 или как см. 6. Активные фазированные антенные решетки. Под ред. Д.И. Воскресенского и А.И. Канащенкова. - М.: Радиотехника, 2004) на основе многоканального приемо-передающего модуля АФАР (стр. 118, рис. 6).
Измерение наклонных дальностей, сумм расстояний производится на основе измерения времени прихода отраженных от цели с помощью известных аналоговых или цифровых устройств, предназначенных для измерения дальности (дальномеров), например, как описано в известных источниках информации (см. 8. Бакулев П.А. Радиолокационные системы. - М: Радиотехника, 2004, с. 240.).
Измерение радиальных скоростей и скорости изменения сумм производится на основе измерения соответствующих им доплеровских частот (см. 8. Бакулев П.А. Радиолокационные системы. - М.: Радиотехника, 2004, с. 277-279.).
Передача данных, соответствующих дальности, сумме и разности дальностей и скоростей изменения, на вычислительное устройство выполняется посредством известных линий передачи данных, например, (9. Патент на изобретение РФ №2441330, МПК H04L 5/02, опубл. 27.01.2012).
Синхронизация режимов работы РЛС может осуществляться как в (10. Патент на изобретение РФ №2304788, МПК G01S 7/285, H04L 7/00, опубл. 20.08.2007).
Вычисление уточненных значений дальностей, радиальных скоростей, прямоугольных координат, скоростей их изменения и вектора скорости цели являются вычислительными процедурами и могут быть реализованы как в (11. Патент на полезную модель РФ №72339, МПК G06F 15/16, опубл. 10.04.2008).
Измерение координат расположения РЛС входящих в систему и измерение скорости изменения координат перемещения РЛС входящих в систему может быть осуществлено на основе приемников глобальной спутниковой навигационной системы, например как в (см. 12. Электронный ресурс https://seacomm.ru/catalog/99/1202/).
Изобретение может быть использовано в радиолокационных и радионавигационных системах для определения местоположения объектов. Техническим результатом изобретения является повышение точности определения пространственных координат цели и скорости их изменения. В многопозиционной дальномерной радиолокационной системе при взаимном перемещении приемо-передающих позиций и целей осуществляют на каждой позиции системы излучение зондирующих сигналов, прием отраженных от цели сигналов, излученных этой позицией, измерение по принятым сигналам дальности от этой позиции до цели. При этом на каждой позиции измеряют радиальные скорости цели, принимают отраженные от цели сигналы, излученные другими позициями, разделяют принятые сигналы по принадлежности к излучившей их позиции, измеряют по принятым сигналам суммы дальностей и скорости их изменения от этой позиции до цели и от цели до других позиций. Далее определяют прямоугольные координаты расположения каждой из позиций, скорости изменения прямоугольных координат каждой из позиций и передают сигналы, соответствующие измеренным значениям дальностей, радиальных скоростей, сумм и дальностей и скорости их изменения, прямоугольные координаты расположения каждой из позиций и скорости их изменения на центральный пункт обработки, где вычисляют уточненные значения дальностей и радиальных скоростей относительно каждой из позиций. После этого определяют прямоугольные координаты целей и скорости их изменения. 5 ил.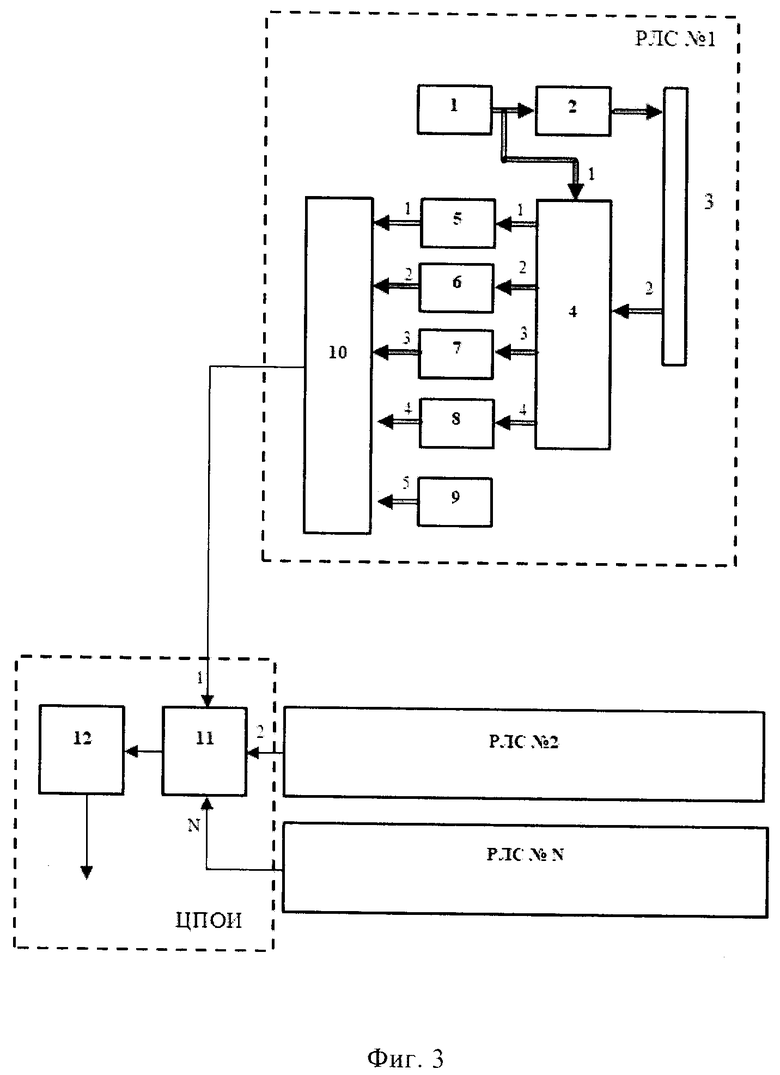
Способ определения координат и параметров движения целей в дальномерной многопозиционной радиолокационной системе, при котором осуществляют на каждой позиции излучение зондирующих сигналов, прием отраженных от цели сигналов, излученных этой позицией, измерение по принятым сигналам дальности от этой позиции до цели, при этом на каждой позиции измеряют радиальные скорости цели, принимают отраженные от цели сигналы, излученные другими позициями, разделяют принятые сигналы по принадлежности к излучившей их позиции, измеряют по принятым сигналам суммы дальностей и скорости их изменения от этой позиции до цели и от цели до других позиций, отличающийся тем, что определяют прямоугольные координаты расположения каждой из позиций, определяют скорости изменения прямоугольных координат каждой из позиций, передают сигналы, соответствующие измеренным значениям дальностей, радиальных скоростей, суммарных дальностей и скоростей их изменения, прямоугольных координат расположения каждой из позиций и скорости их изменения на каждой из позиций, на центральный пункт обработки, где вычисляют уточненные значения дальностей и радиальных скоростей относительно каждой из позиций, вычисляют прямоугольные координаты целей и скорости их изменения по формулам, позволяющим определить уточненные значения наклонных дальностей до цели относительно каждой из РЛС, входящих в систему по результатам измерений наклонных дальностей и сумм расстояний
где:
 - матрица (вектор-строка) искомых уточненных значений оценок дальностей размерностью 1×N,
- матрица (вектор-строка) искомых уточненных значений оценок дальностей размерностью 1×N,
Λ=diag[λl, λi, …, λn] - диагональная матрица размерностью n×n,
А - матрица коэффициентов при неизвестных размерностью N×n,
N - число РЛС в системе,
n=N2,
А - матрица коэффициентов при неизвестных размерностью N×n,
 - матрица (вектор-строка) первичных измерений дальномерных параметров,
- матрица (вектор-строка) первичных измерений дальномерных параметров,
 - наклонные дальности до цели соответственно относительно i-ой позиции,
- наклонные дальности до цели соответственно относительно i-ой позиции,
 при
при  - суммарные дальности до цели относительно i-ой и j-ой позиций,
- суммарные дальности до цели относительно i-ой и j-ой позиций,
рассчитывают уточненные значения радиальных скоростей целей относительно каждой из РЛС, входящих в систему по результатам измерений радиальных скоростей и скоростей изменения суммарных дальностей
 - матрица (вектор-строка) искомых оценок уточненных значений размерностью 1×N,
- матрица (вектор-строка) искомых оценок уточненных значений размерностью 1×N,
 матрица (вектор-строка) первичных измерений скорости изменения дальномерных параметров,
матрица (вектор-строка) первичных измерений скорости изменения дальномерных параметров,
 - радиальная скорость цели,
- радиальная скорость цели,
 - скорость изменения суммарных дальностей,
- скорость изменения суммарных дальностей,
λi - длина волны РЛС,
рассчитывают прямоугольные координаты цели X, Y, Н
где
где Δxij=xi-xj, Δyij=yi-yj, Δhij=hi-hj,  xi, yi, hi - прямоугольные координаты РЛС,
xi, yi, hi - прямоугольные координаты РЛС,
определяют проекции вектора скорости цели на оси прямоугольной системы координат 

где:

осуществляют вычисление вектора скорости цели по формуле 
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛИ В ТРЕХПОЗИЦИОННОЙ ДАЛЬНОМЕРНОЙ РАДИОЛООКАЦИОННОЙ СИСТЕМЕ | 2012 |
|
RU2515571C1 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| Способ и устройство определения координат источника радиоизлучения | 2017 |
|
RU2659808C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2009 |
|
RU2416806C2 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2019 |
|
RU2717231C1 |
| СПОСОБ ПАССИВНОЙ РАДИОЛОКАЦИИ | 2014 |
|
RU2560089C1 |
| WO 2013136648 A1, 19.09.2013 | |||
| CN 111273266 A, 12.06.2020 | |||
| JP 2009270827 A, 19.11.2009 | |||
| CN 111157985 A, 15.05.2020. | |||

