Настоящее изобретение относится к устройству для обнаружения сигналов рассеянного света, а также к способу его обнаружения.
В частности, в области устройств обнаружения пожара известны дымовые пожарные извещатели, действующие на оптических принципах, в соответствии с которыми зона рассеянного света, в которой, возможно, могли бы присутствовать частицы, распределенные в воздухе, подвергается воздействию света из источника света. Эти частицы могут быть вызваны, например, частицами пыли или частицами табачного дыма, но также и пожарами в помещениях, обнаружение которых является обязательным. Вне прямого оптического пути света, излучаемого из источника света, в обычных устройствах предусматривается расположение оптических датчиков, таких как, например, фотодиоды, фоторезисторы и т. п., имеющих соответственно связанный контур усилителя. Эти датчики обнаруживают любой свет, который может рассеиваться этими частицами, и, например, при превышении конкретного порога подавать аварийный сигнал.
Кроме того, известны системы для классификации разных типов частиц, т.е., в конкретных системах для классификации разных типов пожара на основании свойств частиц. Например, из напечатанной публикации EP 2281 286 A1 известно устройство, позволяющее отличать частицы пыли от тех частиц, которые появляются при пожарах. В дополнение к датчикам рассеянного света (оптическим датчикам) в этих обычных системах для классификации типа частиц обычно используются и другие типы датчиков, например датчики газа и т. п.
Недостаток упомянутых обычных устройств заключается либо в том, что в случае относительно недорогого конструктивного исполнения классификация в соответствии с разными видами частиц может быть недостоверной и может не обеспечивать эффективное обнаружение и/или подавление переменного возмущения, либо в том, что необходимо использовать относительно дорогие датчики, такие как, например, датчики газа и т. п. Последнее решение приводит к увеличению расходов и усложнению схемы.
Кроме того, недостатком датчиков газа, в частности, является относительно высокая потребность энергии.
Настоящее изобретение основано на цели дополнительного усовершенствования обычного устройства для обнаружения сигналов рассеянного света с обеспечением простого и экономичного конструктивного исполнения и изготовления, а также повышенной точности обнаружения. Кроме того, должно быть уменьшено потребление энергии.
Поставленная цель достигается устройством в соответствии с независимым пунктом 1 формулы изобретения, а также способом в соответствии с независимым пунктом 24 формулы изобретения.
В зависимых пунктах изложены дополнительные преимущественные усовершенствования нового решения.
Изобретение основано на следующих базовых знаниях.
Основной принцип устройств, действующих оптически при обнаружении сигналов рассеянного света, в частности, дымовых пожарных извещателей и т. п., заключается в использовании отличающихся характеристик рассеяния у разных типов частиц, распределенных в окружающем воздухе. В соответствии с настоящим изобретением окружающий воздух представляет собой текучую среду-носитель, в которой распределены частицы, под которыми обычно понимаются твердые частицы, но которые определенно включают и микрочастицы жидкости.
В зависимости от взаимосвязи между размером частиц и длиной волны света, попадающего в зону рассеянного света, вступают в действие разные механизмы отражения и рассеяния с разными частицами или типами частиц. Хотя при некоторых условиях «размер частиц - длина волны падающего света» можно ожидать, что рассеянный свет будет наблюдаться во всех пространственных направлениях от частицы, при других условиях «длина волны - размер частиц» возникают другие распределения интенсивности для отражающей и/или рассеивающей частицы, например распределения интенсивности, связанные с телесным углом или связанные с поляризацией.
Иными словами, связанное с телесным углом распределение рассеянного света частицы, на которую падает луч света, освещая эту частицу, зависит не только от длины волны падающего света, но и, в зависимости от обстоятельств, от угла зрения, размера частиц, показателя преломления среды частицы, а также поляризации падающего излучения.
В размерном диапазоне очень малых частиц, в каждом случае относительно длины волны возбуждающего света, обычно доминирует механизм упругого рассеяния падающих электромагнитных волн, известного как Рэлеевское рассеяние. В одном размерном диапазоне, в котором длина волны возбуждающего света приблизительно соответствует размеру частицы, механизм упругого рассеяния падающих электромагнитных волн можно описать теорией Ми, которая при описании точного решения процесса рассеяния требует предположения геометрии частиц (сферические частицы). При дальнейшем увеличении размера частиц рассеяние может описываться обычной геометрической рефракцией частиц.
В области Рэлеевского рассеяния и в области рассеяния Ми интенсивности рассеяния излучения, рассеивающегося на частицах, зависят, среди прочего, от телесного угла, размера частиц (радиуса частиц), плоскости поляризации, угла рассеяния и комплексного показателя преломления среды суспензии, т.е., конкретного воздуха.
Пространственное распределение света, рассеиваемого самой частицей, имеет профили интенсивности, зависящие от направления наблюдения. В процессе рассеяния, особенно в области Рэлеевского рассеяния и рассеяния Ми, взаимодействующие составляющие дифракции, преломления и отражения на соответствующей рассеивающей частице все играют роль в этих профилях интенсивности. Из-за этого взаимодействующего процесса рассеяния, не только профили интенсивности зависят от направления, но и интенсивности рассеяния затем также варьируют в своих соответствующих направлениях поляризации.
В обнаружении рассеянного света играет роль и тот факт, что, например, при обнаружении рассеянного света, основанном на выходе, отверстие используемого оптического датчика является конечным. Поэтому необходимо учитывать и телесный угол обнаружения.
Таким образом, вышеуказанное взаимодействие между разными составляющими в процессе рассеяния представляет собой взаимодействие дифракции, преломления и отражения на частице. По этой причине, а также ввиду ограничений оптического датчика по телесному углу обнаружения и ввиду зависимости, среди прочего, от радиуса частицы, длины волны падающего света, показателя преломления окружающей среды, угла рассеяния и угла поляризации профили интенсивности света, рассеиваемого разными типами частиц, зависят, в частности, от расположения датчика относительно зоны рассеянного света и любого поляризационного светофильтра, который может располагаться перед датчиком.
Настоящее изобретение основано на том, что составы частиц, образующихся, например, при определенном типе пожара, проявляют характеристическое распределение, и при этом наложение разных механизмов рассеяния или характеристик рассеяния соответственно в зоне рассеянного света подобным образом дает соответствующие характеристические, зависящие от положения и зависящие от поляризации распределения интенсивности.
Иными словами, интенсивность рассеянного света, измеренная в конкретном месте возле зоны рассеянного света относительно времени, за которое развиваются частицы, т.е. в ходе пожара, например, демонстрирует связанный с местом и связанный с поляризацией характеристический образец.
Хотя в случае лишь одной точки измерения возле зоны рассеянного света лишь с одной поляризацией по-прежнему возможны противоречия между характеристическими образцами, связанными с разными типами частиц и, таким образом, с разными типами пожара, при увеличении числа точек измерения и/или обнаруженных направлений поляризации вероятность этих связанных с образцами противоречий падает.
Что касается предлагаемого устройства для обнаружения сигналов рассеянного света, цель, в частности, достигается устройством, содержащим источник света, несколько оптических датчиков для обнаружения рассеянного света и оценочный блок, предназначенный для оценки сигналов, обнаруженных оптическими датчиками. В соответствии с настоящим изобретением, источник света излучает свет в одной зоне рассеянного света, и при этом падающий свет определяет ось падения. Каждый из оптических датчиков расположен под углом датчика относительно оси падения, чтобы обнаруживать рассеянный свет из зоны рассеянного света. По меньшей мере один из нескольких оптических датчиков, предпочтительно оптический датчик, расположенный, по существу, под прямым углом датчика, конструктивно исполнен как опорный датчик. Чтобы классифицировать тип любой частицы, которая может находиться в зоне рассеянного света, оценочный блок сам конструктивно исполнен с возможностью соотнесения профилей сигнала других оптических датчиков с профилем сигнала указанного по меньшей мере одного опорного датчика.
Естественно, здесь следует также отметить, что источник света излучает луч света с конечным низким расширением в зоне рассеянного света. Предпочтительное направление излучения источника света, т.е., в частности, направление света с наибольшей относительной интенсивностью, следует понимать как ось падения падающего света, также и в случае луча падающего света с конечным расширением.
В соответствии с настоящим изобретением необязательно, чтобы несколько оптических датчиков были конструктивно исполнены дискретно или даже точечно; могут использоваться плоские или даже сотовые датчики, такие как, например, приборы с зарядовой связью (CCD) или датчики, изготовленные по технологии CMOS, для обнаружения рассеянного света, при условии, что они будут обеспечивать хотя бы одну зависящую от положения оценку интенсивности падающего света. Таким образом, «несколько оптических датчиков» следует, в частности, понимать и как сотовое или плоское устройство, обеспечивающее зависящую от положения оценку интенсивности падающего света, например, в виде сотовых или плоских связанных точек измерения.
В качестве оптических датчиков (фотодетекторов) особенно приемлем любой тип светочувствительного полупроводникового компонента, такой как, например, фотодиоды, но и фоторезисторы, фототранзисторы или фотоумножители.
Подобным образом следует отметить, что каждый из углов нескольких оптических датчиков отличается от других. Оптические датчики в соответствии с настоящим изобретением обычно расположены в одной плоскости, так что углы датчиков, в каждом случае относительно оси падения света возбуждения, могут определяться в одной и той же плоскости. В этой связи следует отметить, что приведенные выше утверждения относительно конечного расширения луча света, излучаемого источником света, естественно, применимы и к направлению обнаружения оптических датчиков, на основании которого определяется соответствующий угол индивидуального датчика.
В случае если отдельные оптические датчики не лежат в общей плоскости, т.е. в случае если, в частности, ось падения и оси отдельных датчиков не пересекаются (ось падения и оси датчиков являются скрещивающимися линиями), угол датчика следует понимать как угол, который можно определить между линиями, параллельными оси падения, и линиями, параллельными оси датчика, пересекающимися в одной точки в пространстве.
Следует также отметить, что соотношение профилей сигналов других оптических датчиков с профилем сигнала опорного датчика предпочтительно представляет собой нормализацию к уровню сигнала опорного датчика. Возможна, например, непрерывная нормализация по времени соответственно измеренных профилей сигналов, т.е. при дискретизации сигналов по времени, например, нормализация каждого отдельного образца каждого измерительного сигнала других оптических датчиков к тем образцам профиля сигнала опорного датчика, которые соответствуют тому же случаю дискретизации.
Такое соотнесение с профилем сигнала опорного датчика, т.е., в частности, такая нормализация к сигналу опорного датчика, возможно, однако, и в контексте регрессии отдельных точек измерения по истекшему времени, причем в этом случае заодно определяется наклон линий регрессии опорного датчика. Для остальных датчиков осуществляется обращение к уровням сигналов опорного датчика для выполнения применимых регрессий уровней сигналов датчиков для соответствующего датчика, которые, в идеальном случае, пропорциональны измеренной интенсивности рассеянного света, так что наклоны линии наилучшей аппроксимации для остальных датчиков увязаны с наклоном для опорного датчика, нормализованным к единице.
Предлагаемое устройство для обнаружения сигналов рассеянного света обладает рядом преимуществ по сравнению с ранее известными устройствами. Например, использование нескольких оптических датчиков под разными углами обнаружения предоставляет экономичную и энергосберегающую возможность достоверной и точной классификации типа частиц, присутствующих в зоне рассеянного света. В частности, обеспечение нескольких оптических датчиков обеспечивает достоверное задание образцов расположения частиц, характерных для некоторых типов частиц. Хотя для отдельных датчиков рассеянного света возможны конфликты образцов, особенно при использовании регрессионных методов шумоподавления или шумопонижения, которые могут привести к неправильным классификациям, обеспечение нескольких оптических датчиков значительно снижает возможность этих конфликтов образцов. Точность обнаружения и классификации, обеспечиваемая настоящим изобретением, повышается без необходимости использовать, например, дорогостоящие и энергетически неэкономные датчики газа и т. п.
Поскольку один из нескольких оптических датчиков используется как опорный датчик, т.е. профиль обнаруженного им сигнала используется как опорный сигнал, профили индивидуальных сигналов в значительной степени не зависят от абсолютных интенсивностей рассеянного света, что уменьшает сложность калибровки и дополнительно упрощает классификацию.
В этой связи следует отметить, что при непрерывном соотнесении профилей сигналов с профилем сигнала опорного датчика в каждом случае дискретизации профили сигналов в целом всегда ориентируются на опорное значение, обеспечиваемое опорным датчиком, это позволяет осуществлять простое сравнение с (подобным образом нормализованными) сохраненными данными с целью классификации любых частиц, которые могут присутствовать в зоне рассеянного света.
Классификация типа частиц позволяет проводить различие между реальным пожаром и ложной переменной. В частности, таким образом может быть значительно повышен уровень надежности по предотвращению ложных тревог. Например, дым от сигареты может, следовательно, распознаваться как переменная возмущения, которая может быть направлена в виде информации. Однако дым от кабеля (тлеющий пожар) соответственно инициирует сигнал тревоги.
Соответственно, в соответствии с одним аспектом настоящего изобретения дополнительно предлагается такое конструктивное исполнение оценочного блока, согласно которому он будет проводить различие между параметром пожара и ложной переменной, предпочтительно автоматически, в зависимости от классифицированного типа частиц. В этой связи целесообразно, например, дополнительно предусмотреть устройство аварийной сигнализации, выделенное оценочному блоку, конструктивно исполненное для подачи, предпочтительно автоматически, сигнала тревоги или сигнала отбоя после тревоги в зависимости от классифицированного типа частицы. В соответствии с настоящим изобретением тип (типы) частиц, при присутствии которых устройство аварийной сигнализации подаст сигнал тревоги, преимущественно предварительно определен (определены) или может (могут) предварительно определяться. В соответствии с настоящим изобретением, например, сигнал о пожарной тревоге выдается автоматически после прекращения процесса классификации, причем это, в частности, происходит независимо от каких-либо порогов срабатывания сигнализации, т.е. независимым от порогов срабатывания сигнализации образом.
Предлагаемая классификация типа частиц не только повышает надежность предотвращения ложных тревог, но и позволяет инициировать предусмотренные меры ручного или автоматического пожаротушения в зависимости от классифицированного типа частиц. В этой связи особенно преимущественно, что сигнал о пожарной тревоге выдается независимо от каких-либо порогов срабатывания сигнализации, если в ходе классификации достоверно обнаруживается установившийся образец. Однако, как альтернатива, целесообразно также, чтобы определенные классификации обеспечивали в результате сигнал пожарной тревоги, а информация о ложной переменной выдавалась при обнаружении в ходе классификации другого типа частицы.
В соответствии с еще одним аспектом предлагаемого решения предусматривается, что оценочный блок предназначен также для сравнения данных, полученных из профилей сигналов, обнаруженных несколькими оптическими датчиками, с образцами сигналов. Предпочтительно это сравнение происходит непрерывно во времени. При достаточно высокой степени соответствия между профилями обнаруженных сигналов и одним из образцов сигналов выдается сигнал идентификации, идентифицирующий классифицированный тип частицы.
В этой связи следует отметить, что термин «эталонные профили сигнала» в случае нескольких оптических датчиков относится к ряду профилей сигнала, т.е., профиль сигнала по оси времени каждого из использованных датчиков сравнивается с соответствующим эталонным профилем сигнала соответствующего датчика из матрицы эталонных профилей сигнала. Разумеется, термин «профиль сигнала» или «эталонный профиль сигнала» в этом случае не должен также, в свою очередь, интерпретироваться так, что лишь фактически зарегистрированные профили сигнала отдельных датчиков должны сравниваться между собой без, например, выполнения обработки сигналов. Таким образом, в случае, если оценочный блок предназначен для независимого сравнения профилей сигнала с эталонными профилями сигнала, предполагается также выполнять регрессию профилей сигнала, например, после нормализации, к сигналу опорного датчика и соответствующих наклонов линий наилучшей аппроксимации обнаруженных сигналов к ряду наклонов эталонных профилей сигнала.
Следует отметить, что для этого сравнения с эталонными профилями сигнала профили сигнала, например, хронологически буферизуются по сегментам с выбором при этом подходящего хронологического интервала сравнения. Например, целесообразно выбирать интервал сравнения так, чтобы добиться точности обнаружения, достаточно высокой для классификации и в то же время обеспечивающей непревышение предопределенной (например, внешними условиями, стандартами или иной нормативной документацией) максимальной временной задержки до выдачи сигнала идентификации.
Естественно, возможна и «параллельная» буферизация, например, в кольцевом буфере, при которой соответствующая подобным образом параллельная память указанного кольцевого буфера, соответствующего интервалу сравнения, используется затем для сравнения. В этом случае затем указанная задержка может быть уменьшена.
В соответствии с настоящим изобретением эталонные профили сигнала предпочтительно регистрируются в тестовых сценариях (текстовые пожары и т. п.) с источником монохроматического или подобного света и расположением нескольких оптических датчиков и хранятся в соответствующей памяти. При этом следует отметить, что эта регистрация эталонных профилей сигнала, естественно, выполняется при таком же пространственном расположении датчиков (или, возможно, даже большего числа датчиков), какое позже будет использоваться для оценки в предлагаемом устройстве для обнаружения сигналов рассеянного света.
Степень соответствия, на которой основывается сравнение, либо предопределена, либо может устанавливаться пользователем или оператором. В соответствии с настоящим изобретением степень соответствия может определяться на основании обычных статистических или иных подходящих методик, в частности обычных и известных методов сопоставления с образцом.
Сигналом идентификации может быть сигнал, подходящий для дальнейшей цифровой или аналоговой обработки, при которой, например, обнаруженный тип частицы (т.е., классифицированный тип пожара или классифицированный тип других частиц) применимо кодируется. Однако в простейшем случае возможна и выдача на подходящее оптическое устройство отображения сигнала идентификации, например на экран устройства отображения и т. д., на котором пользователь или оператор может затем считывать классификацию. Возможно и активирование сигналом идентификации электронного или электромеханического выключателя, такого как, например, реле и т. п., чтобы сообщить о наличии пожара, например, на дополнительно подключенный механизм.
Таким образом, благодаря почти полностью автоматизированному сравнению обнаруженных сигналов с эталонными профилями сигнала (или матрицей эталонных профилей сигнала соответственно) упрощается направление дальнейших действий, зависящих от типа пожара, на осуществление выбора (выбора подходящего огнетушащего вещества или средств инертизации, выбора подходящего уровня инертизации и т. д.) для обеспечения эффективного выполнения действий по подавлению пожара. Хотя для этого сравнения обнаруженных сигналов с эталонными профилями сигнала автоматическая работа необязательна, эта автоматизированная и почти полностью автономная классификация типа пожара обладает тем преимуществом, что обеспечивает автоматизированную, зависящую от типа пожара дополнительную обработку сигнала, а также значительную экономию времени для любого потенциального оператора или пользователя.
Что касается конструктивного исполнения оценочного блока, с одной стороны, предпочтительно, чтобы оно обеспечивало определение уровня частиц в зависимости от интенсивности рассеянного света, обнаруженной опорным датчиком. С другой стороны, дополнительное преимущество может заключаться в том, что оценочный блок не выполняет сопоставление с образцом, пока уровень частиц не превышает нижнего порогового значения («минимального уровня частиц»). Оба дополнительных усовершенствования предлагаемого устройства обнаружения служат для дополнительного повышения точности обнаружения при одновременном уменьшении ложных обнаружений.
В соответствии с еще одним аспектом изобретения предусматривается, что источник света излучает по существу монохроматический свет в диапазоне длин волн приблизительно 560-420 нанометров. Предпочтительно источник света излучает свет в диапазоне от приблизительно 470 до приблизительно 450 нанометров. Эти длины волн соответствуют спектру от зеленого до синего цвета. Использование относительно коротковолнового света в соответствии с настоящим изобретением обладает тем преимуществом, что преобладающие размеры частиц, обычно присутствующих при типичных пожарах, демонстрируют преимущественно Рэлеевское рассеяние и рассеяние Ми, при которых коротковолновый свет рассеивается по существу мощнее, чем относительно длинноволновый свет, тем самым приводя к преимущественному распределению интенсивности на оптических датчиках, обнаруживающих рассеянный свет.
В соответствии с еще одним аспектом изобретения предусматривается, что по меньшей мере один из оптических датчиков содержит поляризационный светофильтр, предназначенный для поляризации подлежащего обнаружению рассеянного света.
Применение поляризационного светофильтра по меньшей мере на одном из оптических датчиков может дополнительно уменьшить риск конфликтов образцов путем дополнительной оценки этой дополнительной характеристики рассеяния, что повышает точность обнаружения.
В связи с этим предусматривается, что несколько оптических датчиков, и предпочтительно каждый из оптических датчиков, содержат поляризационный светофильтр. В соответствии с настоящим изобретением плоскости поляризации по меньшей мере двух поляризационных светофильтров расположены по существу перпендикулярно друг другу. Вращение плоскости поляризации по меньшей мере одного поляризационного светофильтра относительно по меньшей мере еще одного поляризационного светофильтра, при котором эти поляризационные светофильтры выделяются разным оптическим датчикам из нескольких датчиков, будет обеспечивать, что в результате по-прежнему будут иметь место достаточно отличающиеся профили сигнала или эталонные профили сигнала, даже если распределение интенсивности для конкретного типа частицы лишь минимально зависит от направления наблюдения, но зато все больше от направления поляризации, что даже в этом случае снижает риск конфликтов образцов и опять-таки повышает точность обнаружения/классификации. Повышение достижимой точности благодаря применению поляризационных светофильтров, а также их конкретному выравниванию между собой может быть достигнуто в соответствии с настоящим изобретением крайне экономично, поскольку поляризационные светофильтры простые и недорогие в изготовлении.
В соответствии с еще одним аспектом изобретения предусматривается, что каждый из оптических датчиков по существу направлен в сторону общей области обнаружения зоны рассеянного света.
Такое направление в общую область обнаружения, которая представляет собой подмножество зоны рассеянного света и обычно расположена вокруг общего центра рассеянного света, опять-таки может дополнительно повысить точность обнаружения. В частности, в соответствии с настоящим изобретением учитывается тот факт, что отверстие оптических датчиков обычно является конечно малым и, таким образом, дает форму и/или расширение лепестка приема соответствующего оптического датчика в зависимости от телесного угла. Таким образом, выставление в общую область обнаружения может дополнительно снизить неточности измерения.
В соответствии с еще одним аспектом изобретения предусматривается, что отдельные или все оптические датчики конструктивно исполнены как фотодиоды. В этих полупроводниковых диодах подлежащий обнаружению рассеянный свет падает непосредственно на p-n переход, и при этом фотоны рассеянного света в p-n переходе вызывают образование пары электрон-дырка. Эти фотодиоды являются относительно недорогими и обеспечивают простое структурирование схем, ввиду чего сложное электронное управление не требуется. В зависимости от режима работы (типа характеристики), такой фотодиод может дополнительно работать с несколькими порядками величины, предпочтительно в линейном диапазоне.
Вместе с тем возможно, естественно, и применение других подходящих оптических датчиков, таких как, например, фототранзисторы или даже фотоумножители. Фотоумножители имеют чувствительность, на порядки выше, чем у фотодиодов, и основаны на эффекте вторично-электронного умножения. Использование внешнего фотоэффекта (высвобождение электронов из слоя электродов падающими фотонами) ускоряет эти высвобожденные первичные электроны посредством ускоряющего напряжения в сторону дополнительных, расположенных далее электродов, на которых происходит дальнейшее высвобождение вторичных электронов, на этот раз вызванное соответственно ускоренными электронами. Количество падающих умноженных электронов на аноде в конечном итоге оценивается и преобразуется в дополнительный обрабатываемый электрический сигнал.
В связи с этим, или даже независимо от этого, предусматривается также, что источник света представляет собой светоизлучающий диод. Этот светоизлучающий диод для возбуждения зоны рассеянного света является очень экономичным и, кроме того, работает в преимущественных диапазонах длин волн. Для предположительно необходимой температурной компенсации предлагаемого устройства для обнаружения сигналов рассеянного света предполагается, например, простая эксплуатация этого светоизлучающего диода в импульсном режиме для уменьшения тепловыделения. Естественно, возможно и непрерывное возбуждение при условии большего тепловыделения, если применимо.
В соответствии с еще одним аспектом изобретения предусматривается, что устройство содержит один оптический датчик под первым углом датчика, один оптический датчик под вторым углом датчика и один оптический датчик под третьим углом датчика, причем первый угол датчика представляет собой острый угол и вместе со вторым углом датчика составляют в сумме 360°, а третий угол датчика представляет собой тупой угол.
Это конкретное размещение позволяет получать образцы отдельных типов частиц, легко отличимые друг от друга относительно малым числом датчиков с особым пространственным расположением. Предпочтительно первый угол датчика в соответствии с настоящим изобретением составляет приблизительно 45°, и при этом на второй угол датчика приходится предпочтительная величина приблизительно 315°. Третий угол датчика предпочтительно составляет приблизительно 112°. Опорный датчик предпочтительно расположен под углом приблизительно 90°. Опорный датчик, расположенный под прямым углом, оказался особенно преимущественным для нормализации сигналов соответствующих остальных оптических датчиков при условии, что имеются несколько предполагаемых типов частиц (свойств частиц).
Иными словами: при применении опорного датчика, расположенного под прямым углом, риск конфликтов образцов можно уменьшить по сравнению с другими углами опорного датчика. Кроме того, при применении опорного датчика, расположенного под прямым углом, можно добиться более высокой точности классификации, чем при других углах опорного датчика, и причем относительно независимо от общего количества дополнительных датчиков, предусмотренных в соответствующей конфигурации, а также относительно независимо от них углов.
Если предусмотрена экономичная конструкция всего лишь с небольшим числом датчиков, при расположении опорного датчика под прямым углом тип пожара можно классифицировать точнее, чем при других углах опорного датчика.
Опорный датчик, расположенный под прямым углом, является преимущественным, в частности, и в отношении качества обнаруженных сигналов, поскольку опорный датчик, расположенный под углом 90°, занимает «нейтральное» угловое положение, и при этом не является ни прямым, ни обратным излучателем. Испытания показали, что угол 90° для опорного датчика дает наилучший образец для различения вещества.
В соответствии с еще одним аспектом изобретения в описанном выше конкретном расположении первого, второго и третьего датчиков, а также опорного датчика предусматривается, что каждый из оптического датчика под первым углом датчика, оптического датчика под вторым углом датчика и оптического датчика под третьим углом датчика, а также опорного датчика содержит поляризационный светофильтр. Поляризационные светофильтры опорного датчика, оптического датчика под первым углом датчика и оптического датчика под третьим углом датчика в соответствии с настоящим изобретением выровнены относительно друг друга в первой плоскости поляризации, а поляризационный светофильтр оптического датчика под вторым углом датчика выровнен во второй плоскости поляризации, перпендикулярной первой плоскости поляризации. Такое расположение отдельных плоскостей поляризации поляризационных светофильтров оказалось особенно преимущественным, поскольку специальные характеристики отдельных определенных образцов становятся даже четче, тем самым, опять-таки, дополнительно повышая точность обнаружения/классификации.
В соответствии с еще одним аспектом изобретения предусматривается, что оценочный блок предназначен для определения степени соответствия путем корреляции данных, полученных из распределения профилей обнаруженных сигналов в соответствии с методом главных компонент по кластерам (BUC, BAU, PUR, HEP, ABS, PAP, PAE, PVC, ZIG, ZRE, MEH, ZEM, TEP) образцов сигналов. Эта корреляция, т.е. применение известного стохастического метода к обнаруженным сигналам или эталонным сигналам соответственно, позволяет легко и эффективно определять сходство профилей обнаруженных сигналов с эталонными профилям сигнала, благодаря чему объем вычислений и, соответственно, сложность схемы можно поддерживать в разумных пределах, обеспечивая тем самым экономичность.
Вместе с тем, в равной мере возможно также, что оценочный блок предназначен для определения степени соответствия путем определения расстояния между точками данных, полученных из распределения профилей обнаруженных сигналов в соответствии с методом главных компонент по кластерам (BUC, BAU, PUR, HEP, ABS, PAP, PAE, PVC, ZIG, ZRE, MEH, ZEM, TEP) образцов сигналов.
Этот метод главных компонент (PCA) в соответствии с настоящим изобретением обладает преимуществом, заключающимся в использовании непараметрического метода для извлечения соответствующей информации о наборе данных сигналов рассеянного света с шумами, благодаря чему, в принципе, не требуется знание математических степеней свободы, лежащего в основе распределения рассеянного света. В соответствии с настоящим изобретением учитывается, что при определении эталонных профилей сигнала регистрируются больше размеров, чем действительно требуется, и метод главных компонент служит – без необходимости в параметрическом методе – для уменьшения измерений, необходимых для оценки, чтобы можно было легко извлечь соответствующую информацию (главные компоненты).
Вместе с тем в равной мере возможно также, что оценочный блок предназначен для определения степени соответствия посредством оценки с помощью нейронной сети данных, полученных из распределения профилей обнаруженных сигналов в соответствии с методом главных компонент, по кластерам (BUC, BAU, PUR, HEP, ABS, PAP, PAE, PVC, ZIG, ZRE, MEH, ZEM, TEP) образцов сигналов. Указанная нейронная сеть имеет по меньшей мере 38 нейронов. Оценка с помощью нейронной сети обеспечивает простое «обучение» предлагаемого устройства образцовым профилям сигнала одновременно при высокой точности обнаружения во время оценки сигналов, обнаруженных из профилей сигналов.
В соответствии с еще одним аспектом изобретения предусматривается, что образцы сигналов соответствуют сигналам распределения частиц в случае одного или нескольких выбросов частиц из группы, включающей выброс пыли, выброс пара, выброс табачного дыма, тлеющий горения бумаги, тлеющего горения картона, открытое горение бумаги, открытое горение картона, горение ABS, горение н-гептана, горение PVC, горение хлопка, горение дерева или другие случаи выброса частиц.
В соответствии с настоящим изобретением возможна выдача команд на пожаротушение или даже осуществление действий по автоматическому пожаротушению или инертизации в зависимости от конкретной группы обычно происходящих пожаров. В случае обнаружения других выбросов частиц, которые нельзя отнести к какому-либо из конкретных случаев, может приниматься «сценарий наихудшего случая», и в каждом случае может, например, инициироваться полная реакция инертизации или пожаротушения всеми имеющимися средствами. Во всех остальных случаях возможно избирательное пожаротушение с учетом знания конкретного типа пожара.
В соответствии с еще одним аспектом изобретения предусматривается, что устройство используется в аспирационной системе обнаружения пожара. Аспирационная система обнаружения пожара содержит предпочтительно управляемый активный источник воздуха для подачи воздуха, подлежащего классификации, в зону рассеянного света устройства для обнаружения сигналов рассеянного света. Применение в этой аспирационной системе обнаружения пожара является наиболее преимущественным или может в определенное время даже предписываться, если, например, закрытое помещение поддерживается при постоянном базовом уровне инертизации. В этом случае возможно, что без аспирационной системы обнаружения пожара частицы не достигнут зоны рассеянного света, когда возникнет пожар. Таким образом, активная подача воздуха в зону рассеянного света может повысить точность обнаружения, особенно в закрытых помещениях с базовыми или постоянными уровнями инертизации.
В частности, в этом контексте предусматривается также, что предлагаемое устройство содержит механизм для обнаружения минимального уровня частиц, а также механизм для избирательного разрешения подачи воздуха, подлежащего классификации, в зону рассеянного света. При обнаружении минимального уровня частиц точно обеспечивается подача воздуха, подлежащего классификации. Тем самым обеспечивается, что в нерабочем состоянии предлагаемого устройства воздух не протекает через зону рассеянного света, чтобы защитить оптические датчики от загрязнений. Равно как не будет осуществляться подача воздуха в зону рассеянного света, пока не будет достигнут минимальный уровень дыма (минимальный уровень частиц).
В этом месте следует отметить, что снижение, т.е. уменьшение, содержания кислорода может быть достигнуто, например, введением подходящего инертного газа, такого как, например, азот, который предпочтительно генерируется посредством генератора азота. Термин «управляемое уменьшение» в равной степени относится к технически управляемому, а также предпочтительно регулируемому процессу. В одном технически регулируемом процессе, который предпочтительно протекает автоматически, концентрация кислорода в закрытом помещении, чтобы последнее было приведено в инертное состояние, например, непрерывно измеряется подходящим датчиком и непрерывно сравнивается с идеальным или заданным значением, которое должно быть достигнуто как целевое значение соответствующим введением инертного газа. Указанное целевое значение предпочтительно устанавливается автоматически системой инертизации, содержащей предлагаемое устройство для обнаружения сигналов рассеянного света, при этом в зависимости от типа пожара, классифицированного посредством предлагаемого устройства, подходящий или достаточный уровень инертизации определяется с таким расчетом, чтобы при необходимости эффективно погасить конкретный горящий материал.
В этой связи следует упомянуть, что уровень инертизации, т.е. целевая концентрация кислорода, обычно поддерживается в течение определенного периода времени, причем техническая регулирующая система, в свою очередь, подстраивается под него. Она может, например, осуществлять действие пожаротушения посредством инертизации, что требует для завершения определенного количества времени.
Разумеется, возможно также, что после того, как предлагаемое устройство классифицирует пожар, это целевое значение определяется вручную с помощью таблицы и вручную вводится в соответствующую систему инертизации.
В соответствии с еще одним аспектом изобретения предусматривается, что управляющий сигнал представляет собой сигнал идентификации, идентифицирующий распознанный эталонный профиль сигнала, и что система инертизации дополнительно предназначена для автоматической установки уменьшенного содержания кислорода.
Цель предлагаемого способа достигается способом обнаружения сигналов рассеянного света, включающим этапы подачи света, обнаружения рассеянного света и предпочтительно непрерывного соотнесения профилей сигналов оптических датчиков с профилем сигнала опорного датчика. На этапе подачи света согласно способу свет предпочтительно подают в диапазоне длин волн от приблизительно 560 до приблизительно 420 нм, в частности предпочтительно от приблизительно 470 до 450 нм и, в частности, из светоизлучающего диода в зону рассеянного света. В соответствии с настоящим изобретением падающий свет определяет ось падения. На этапе обнаружения рассеянного света рассеянный свет, отражаемый от любых частиц, которые могут присутствовать в зоне рассеянного света, обнаруживают посредством нескольких оптических датчиков, причем в качестве нескольких оптических датчиков предпочтительно используют несколько фотодиодов, каждый из которых расположен под углом к оси падения. Что касается этапа предпочтительно непрерывного соотнесения профилей сигналов оптических датчиков с профилем сигнала опорного датчика, профили сигнала для классификации типа частицы, которая может присутствовать в зоне рассеянного света, соотносят с профилями сигналов оптических датчиков на профиле сигнала опорного датчика, предпочтительно с профилем сигнала опорного датчика, расположенного по существу под прямым углом датчика.
Преимущества, описанные выше в отношении устройства, аналогично присущи и предлагаемому способу.
В соответствии с еще одним аспектом изобретения в части способа предусматривается, что способ дополнительно включает этап предпочтительно непрерывного сравнения данных, полученных на основе сигналов, обнаруженных из профилей сигналов с помощью профиля сигнала опорного датчика, с образцами сигналов и этап выдачи сигнала идентификации при достаточно высокой степени соответствия одному из указанных образцов сигналов предпочтительно в систему инертизации для управляемого уменьшения содержания кислорода в закрытом помещении, причем сигнал идентификации идентифицирует тип частицы как классифицированный.
Ниже предлагаемое решение описывается более подробно со ссылками на фигуры, на которых:
фиг. 1 представляет собой схематический вид устройства для обнаружения сигналов рассеянного света в соответствии с первым вариантом осуществления изобретения;
фиг. 2 представляет собой схематический вид устройства для обнаружения сигналов рассеянного света в соответствии со вторым вариантом осуществления изобретения;
фиг. 3 иллюстрирует профили во времени сигналов оптических датчиков, используемых в устройстве, показанном на фиг. 1, на левой стороне фигуры во время процедуры обнаружения рассеянного света;
фиг. 4 иллюстрирует линии регрессии профилей сигналов с фиг. 3, соотнесенные с сигналом опорного датчика;
фиг. 5 иллюстрирует профили сигналов, подобные показанным на фиг. 3, для оптических датчиков, расположенных справа на фиг. 1;
фиг. 6 иллюстрирует линии регрессии, соотнесенные с тем же опорным датчиком аналогично фиг. 4, для оптических датчиков, расположенных справа на фиг. 1;
фиг. 7 иллюстрирует наклоны линий наилучшей аппроксимации, определенные на фиг. 4 и фиг. 6, соотнесенные с индексом датчика, для выполненного измерения частиц;
фиг. 8 иллюстрирует профили сигналов, аналогичные фиг. 3, для второго тестового пожара;
фиг. 9 иллюстрирует линии регрессии, аналогичные фиг. 4, для второго тестового пожара;
фиг. 10 иллюстрирует профили сигналов, аналогичные фиг. 5, для второго тестового пожара;
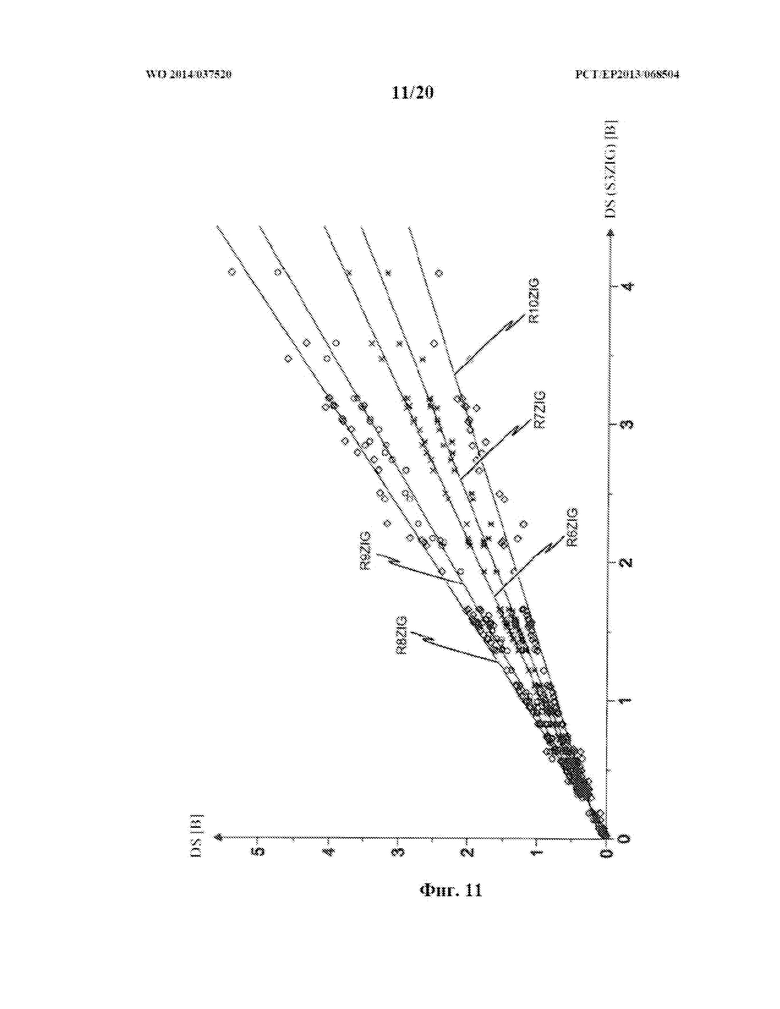
фиг. 11 иллюстрирует линии регрессии, аналогичные фиг. 6, для второго тестового пожара;
фиг. 12 иллюстрирует наклоны линий наилучшей аппроксимации, аналогичные фиг. 7, для второго тестового пожара;
фиг. 13 иллюстрирует профили сигналов, аналогичные фиг. 3, для третьего тестового пожара;
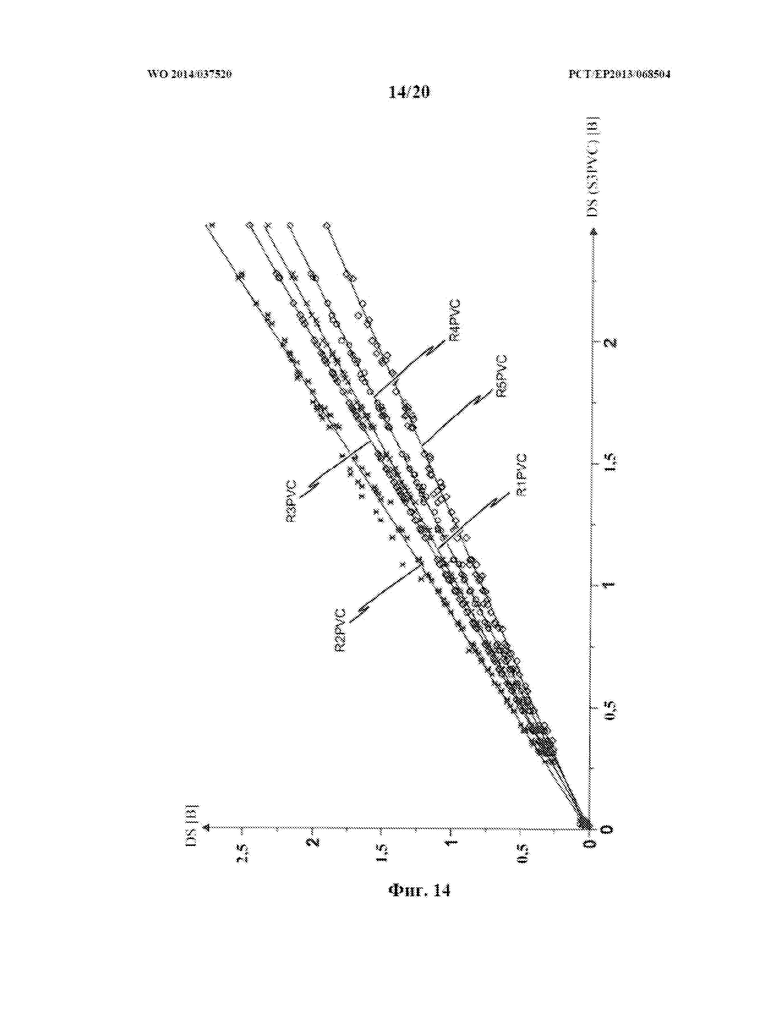
фиг. 14 иллюстрирует линии регрессии, аналогичные фиг. 4, для третьего тестового пожара;
фиг. 15 иллюстрирует профили сигналов, аналогичные фиг. 5, для третьего тестового пожара;
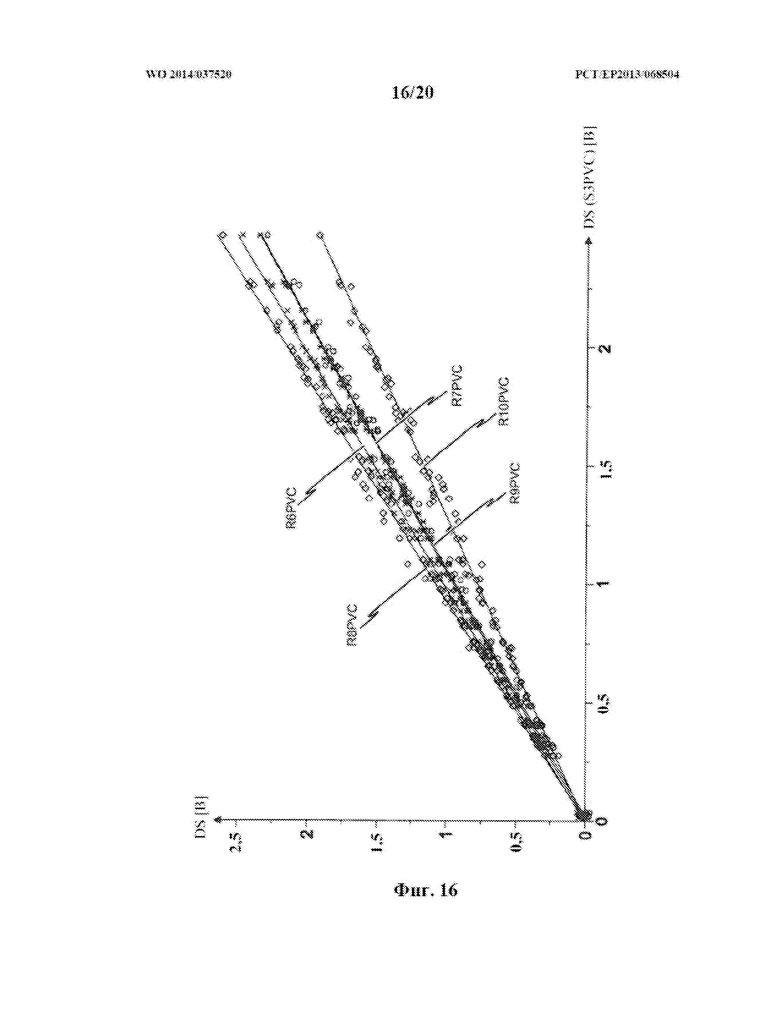
фиг. 16 иллюстрирует линии регрессии, аналогичные фиг. 6, для третьего тестового пожара;
фиг. 17 иллюстрирует наклоны линий наилучшей аппроксимации, аналогичные фиг. 7, для третьего тестового пожара;
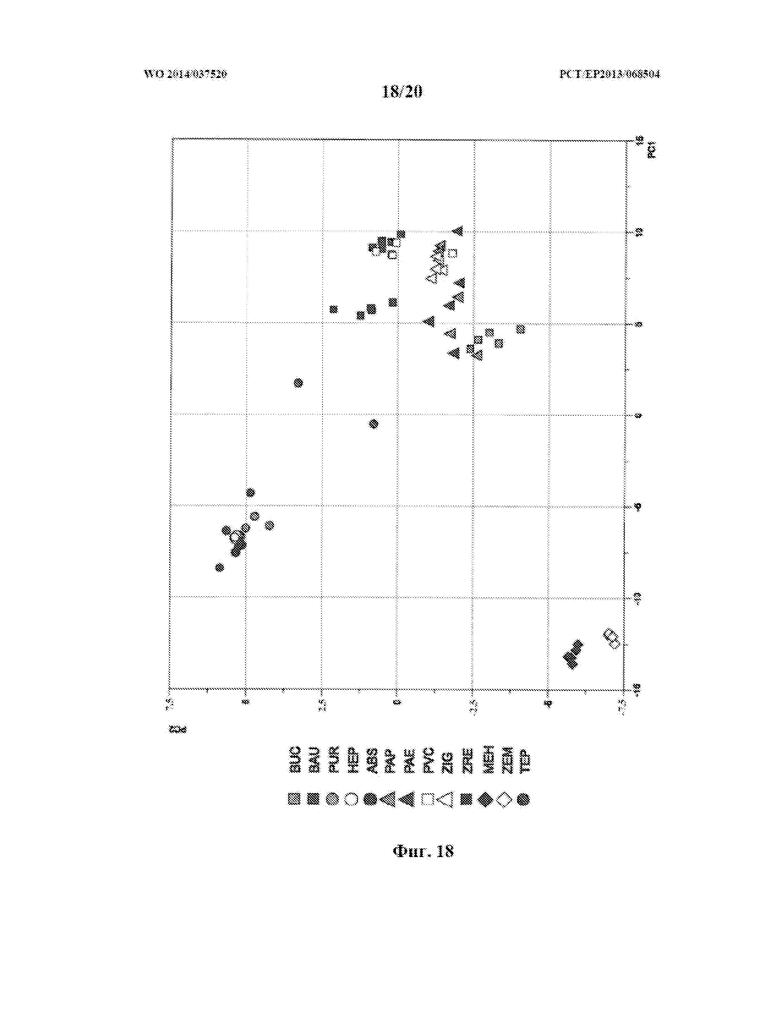
фиг. 18 иллюстрирует соответствующий кластер данных датчиков для осуществления метода главных компонент для разных типов пожара: главная компонента 2 (PC2) как функция главной компоненты 1 (PC1);
фиг. 19 иллюстрирует кластер, аналогичный фиг. 18, для третьей главной компоненты (PC3) как функции первой главной компоненты (PC1);
фиг. 20 иллюстрирует кластер, аналогичный 18 и 19, для третьей главной компоненты (PC3) как функции второй главной компоненты (PC2).
Фиг. 1 представляет собой схематический вид первого варианта осуществления предлагаемого устройства 100 для обнаружения сигналов рассеянного света. Устройство 100 содержит источник 10 света, излучающий свет по оси 11 падения в зоне 15 рассеянного света, показанной пунктирными линиями.
В варианте осуществления на фиг. 1 источник 10 света конструктивно исполнен как светоизлучающий диод и, соответственно, излучает свет в конечно узком лепестке диаграммы направленности. Ось 11 падения предпочтительно определена так, что проходит по линиям, которые соединяли бы соответствующие центры конуса излучения, если бы конус света источника света был показан на плоскостях сечения, проходящих в зону 15 рассеянного света перпендикулярно плоскости бумаги фиг. 1.
Источник 10 света излучает по существу монохроматический свет в диапазоне длин волн приблизительно от 560 приблизительно до 420 нм (диапазон от зеленой до синей части спектра видимого света). Предпочтительно источник 10 света излучает свет в диапазоне приблизительно от 470 приблизительно до 450 нм (синяя часть спектра видимого света).
Посредством механизмов рассеяния, управляющих частицами (Рэлеевское рассеяние/рассеяние Ми), свет в этом диапазоне длин волн рассеивается мощнее, чем свет с более длинными волнами, что приводит к относительно высоким уровням сигналов на датчиках 21, 22, 23, 24, 25, 26, 27, 28, 29, 30 рассеянного света по сравнению со светом с большей длиной волны и, таким образом, приводит к относительно высокому отношению сигнал-шум.
В первом варианте осуществления, показанном на фиг. 1, несколько оптических датчиков 21, 22, 23, 24, 25, 26, 27, 28, 29, 30 расположены в той же плоскости, в какой расположен и источник 10 света, причем каждый датчик расположен под соответствующим углом W1, W2, W3, W4, W5, W6, W7, W8, W9, W10 датчика (математически отрицательным, принятым на фиг. 1) к оси 11 падения и выставлен в направлении области 16 обнаружения, окружающей центр зоны 15 рассеянного света.
Таким образом, в соответствии с первым вариантом осуществления углы W1, W2, W3, W4, W5, W6, W7, W8, W9, W10 оптических датчиков 21, 22, 23, 24, 25, 26, 27, 28, 29, 30 в каждом случае отличаются друг от друга. Кроме того, оптические датчики 21, 22, 23, 24, 25, 26, 27, 28, 29, 30 расположены в одной плоскости, т.е. в плоскости бумаги фиг. 1. При этом углы датчиков, в каждом случае относительно оси 11 падения света возбуждения, могут быть определены в одной плоскости. В этой связи следует учесть, что приведенные выше замечания относительно конечного расширения луча, излучаемого источником 11 света, естественно, применимы и к направлению обнаружения оптических датчиков 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, на основании чего определяется соответствующий угол W1, W2, W3, W4, W5, W6, W7, W8, W9, W10 отдельного датчика 21, 22, 23, 24, 25, 26, 27, 28, 29, 30.
Если отступить от этого, возможно также, что отдельные оптические датчики 21, 22, 23, 24, 25, 26, 27, 28, 29, 30 не лежат в общей плоскости. Иными словами, в случае, если, в частности, ось 11 падения и оси отдельных датчиков 21, 22, 23, 24, 25, 26, 27, 28, 29, 30 не пересекаются (ось 11 падения и оси датчиков являются скрещивающимися линиями), угол W1, W2, W3, W4, W5, W6, W7, W8, W9, W10 датчика следует понимать как угол, который можно определить между линиями, параллельными оси 11 падения, и линиями, параллельными оси датчика, пересекающимися в одной точке в пространстве.
В первом варианте осуществления, показанном на фиг. 1, каждый из оптических датчиков 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, которые в варианте осуществления на фиг. 1 конструктивно исполнены как фотодиоды, оснащен соответствующим поляризационным светофильтром 41, 42, 43, 44, 45, 46, 47, 48, 49, 50. Каждый из поляризационных светофильтров 41, 42, 43, 44, 45, 46, 47, 48, 49, 50 поляризует любой рассеянный свет, который может ударять в оптические датчики 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, рассеянный любыми частицами, подлежащими классификации, которые могут находиться в зоне 15 рассеянного света, когда свет возбуждения из источника 10 света ударяет о частицы.
Вместо фотодиодов в качестве оптических датчиков 21, 22, 23, 24, 25, 26, 27, 28, 29, 30 (фотодетекторов) может в принципе использоваться и любой иной тип светочувствительных полупроводниковых компонентов, таких как, например, фоторезисторы, фототранзисторы или фотоумножители.
В соответствии с настоящим изобретением поляризационные светофильтры 41, 42, 43, 44, 45 оптических датчиков 21, 22, 23, 24, 25 выставлены в общей плоскости поляризации, а поляризационные светофильтры 46, 47, 48, 49, 50 оптических датчиков 26, 27, 28, 29, 30 выставлены перпендикулярно указанной общей плоскости поляризации.
Здесь следует отметить, что, в частности, в случае плоских или сотовых датчиков, рассмотренных выше, эти поляризационные светофильтры могут быть нанесены непосредственно на датчиковом чипе, т.е. на поверхности датчикового чипа. Иными словами, в частности, в случае решений встроенных плоских или сотовых датчиков (CCD, CMOS и т. п.) на поверхности датчика, соответственно матрицы датчиков, в местах отдельных датчиков или местах обнаружения соответственно может быть предусмотрен слой, находящийся в прямом или непрямом контакте с датчиковым чипом и имеющий поляризационный эффект.
Оптический датчик 23, который, в соответствии с вариантом осуществления на фиг. 1, расположен практически под прямым углом W3, в этом варианте осуществления выполняет роль опорного датчика, т.е. сигналы обнаружения других оптических датчиков 21, 22, 24, 25, 26, 27, 28, 29, 30 соотносятся с опорным датчиком 23 или профилем его сигнала соответственно.
Следует также отметить, что соотнесение профилей сигналов других оптических датчиков 21, 22, 24, 25, 26, 27, 28, 29, 30 с профилем сигнала опорного датчика 23 предпочтительно представляет собой нормализацию к уровню сигнала опорного датчика 23. В соответствии с настоящим изобретением предусматривается, например, непрерывная нормализация по времени соответственно измеренных профилей сигналов, т.е. в случае дискретизации сигналов по времени, например, нормализация каждого отдельного образца каждого измерительного сигнала других оптических датчиков 21, 22, 24, 25, 26, 27, 28, 29, 30 к профилю сигнала к тому образцу профиля сигнала опорного датчика 23, который соответствует тому же случаю дискретизации.
Из-за относительно большого числа оптических датчиков 21, 22, 23, 24, 25, 26, 27, 28, 29, 30 в соответствии с первым вариантом осуществления, показанным на фиг. 1, конфликты образцов и, следовательно, конфликты обнаружения могут быть в значительной степени предотвращены, а это означает, что в случае относительно большого числа оптических датчиков, как в первом варианте осуществления на фиг. 1, могут быть получены образцы сигналов и/или матрицы образцов сигналов высокой точности. Следует, однако, отметить, что в зависимости от соответствующего применения может использоваться значительно меньшее число оптических датчиков 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, и при этом по-прежнему может обеспечиваться высокая точность обнаружения, как будет более подробно описано ниже со ссылками на фиг. 2.
Интенсивность рассеянного света, измеренная в конкретном месте вокруг зоны 15 рассеянного света, проявляет, например во время пожара, связанный с местом и связанный с поляризацией характеристический образец, который может надежно и легко обнаруживаться устройством, показанным на фиг. 1.
При использовании обычных устройств, которые обнаруживают лишь единственное место измерения вокруг зоны 15 рассеянного света без предварительно установленного поляризационного светофильтра, высоковероятно, что непременно произойдут конфликты между образцами обнаружения разных типов пожара. При применении предлагаемого устройства, описанного в первом варианте осуществления со ссылками на фиг. 1, содержащего несколько оптических датчиков 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, из которых один датчик 23 является опорным датчик, вероятность таких связанных с образцом конфликтов уменьшается.
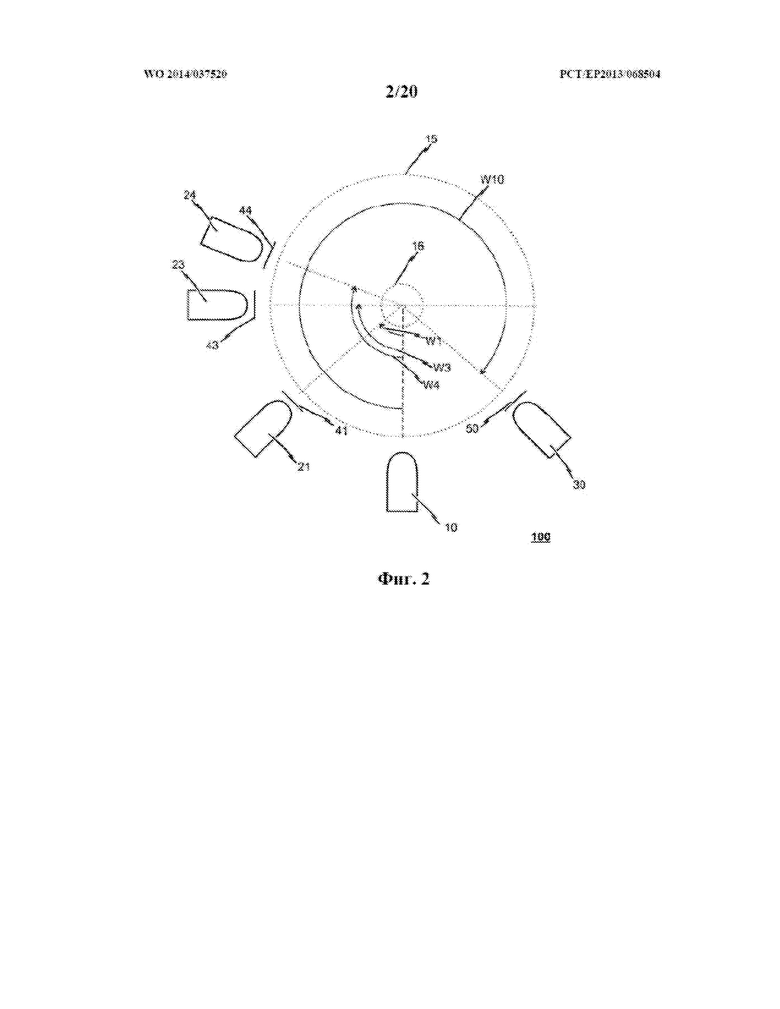
Фиг. 2 иллюстрирует схематическую конструкцию второго варианта осуществления предлагаемого устройства 100, подобного устройству, показанному на фиг. 1, но с заметно меньшим числом оптических датчиков.
Что касается конструктивного исполнения и действия применяемых оптических датчиков 21, 22, 23, 24, 25, 26, 27, 28, 29, 30 и источника 10 света, сказанное в отношении первого варианта осуществления применимо и ко второму варианту осуществления.
В устройстве 100 для обнаружения сигналов рассеянного света в дополнение к источнику 10 света, который опять-таки конструктивно исполнен как светоизлучающий диод, предусмотрены лишь четыре оптических датчика 21, 23, 24, 30, расположенные под соответствующими углами W1, W3, W4, W10 вокруг центра 15 зоны рассеянного света. Оптический датчик 23, расположенный по существу под прямым углом W3, и в этом случае служит как опорный датчик. И во втором варианте осуществления все оптические датчики 21, 23, 24, 30 оснащены соответственно расположенными поляризационными светофильтрами 41, 43, 44, 50.
В соответствии с настоящим изобретением оптический датчик 21 предпочтительно расположен под острым углом W1 приблизительно 45°; датчик 30, расположенный напротив него относительно источника 10 света, находится под углом W10 приблизительно 315°, так что острый угол W1 и угол W10 составляют в суме полный угол, т.е. 360°. Оптический датчик 24 расположен под тупым углом W4, причем тупой угол W4 предпочтительно равен приблизительно 112°. Поляризационные светофильтры 41, 43, 44 оптических датчиков 21, 23, 24 выставлены в одной плоскости поляризации, тогда как плоскость поляризации поляризационного фильтра 50 оптического датчика 30 наоборот повернута на 90°. При конкретной реализации в соответствии со вторым вариантом осуществления на фиг. 2, несмотря на меньшее число датчиков, могут быть определены важные характеристические образцы сигналов или матрицы образцов сигналов, и соответственно сигналы рассеянного света, обнаруженные с высокой точностью обнаружения/классификации, с автоматической классификацией путем сопоставления с соответствующей одной из матриц образцов сигналов.
Ни на фиг. 1, ни на 2 не показан оценочный блок, предназначенный для оценки сигналов, обнаруженных оптическими датчиками 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, который, как описано со ссылками на следующие фигуры, осуществляет показанную нормализацию профилей сигналов датчиков к профилю сигнала опорного датчика (опорный датчик 23 в вариантах осуществления на фиг. 1 и 2).
Целесообразно, что этот оценочный блок представляет собой цифровой оценочный блок, в частности микрокомпьютер, встроенную систему и т. п. В этом случае обеспечивается достаточное разрешение по амплитуде при дискретизации значений сигналов оптических датчиков путем выбора подходящего аналого-цифрового преобразователя. Кроме того, понятно, что дискретизация выполняется c достаточно высокой частотой дискретизации для предотвращения ошибок от наложения спектров.
Этот оценочный блок (не показанный на фиг. 1 и 2) предпочтительно предназначен для сравнения обнаруженных сигналов оптических датчиков (21, 22, 23, 24, 25, 26, 27, 28, 29, 30) с образцами сигналов, показанных на приведенных ниже фигурах, предпочтительно непрерывно. При достаточно высокой степени соответствия с одним из образцов сигналов, этот соответственно выполненный оценочный блок предпочтительно может выдавать сигнал идентификации, идентифицирующий тип частицы как классифицированный.
Это сигнал идентификации может предпочтительно выдаваться в то же не показанное простое оптическое устройство отображения (светодиодный экран или экран оптического устройства отображения и т. п.) или релейное устройство управления. Кроме того, сигнал идентификации может выдаваться в систему инертизации (тоже не показанную на фиг. 1 и 2), осуществляющую соответствующие действия по инертизации для конкретного типа пожара, исходя из автоматически классифицированного типа пожара, зашифрованного в сигнале идентификации.
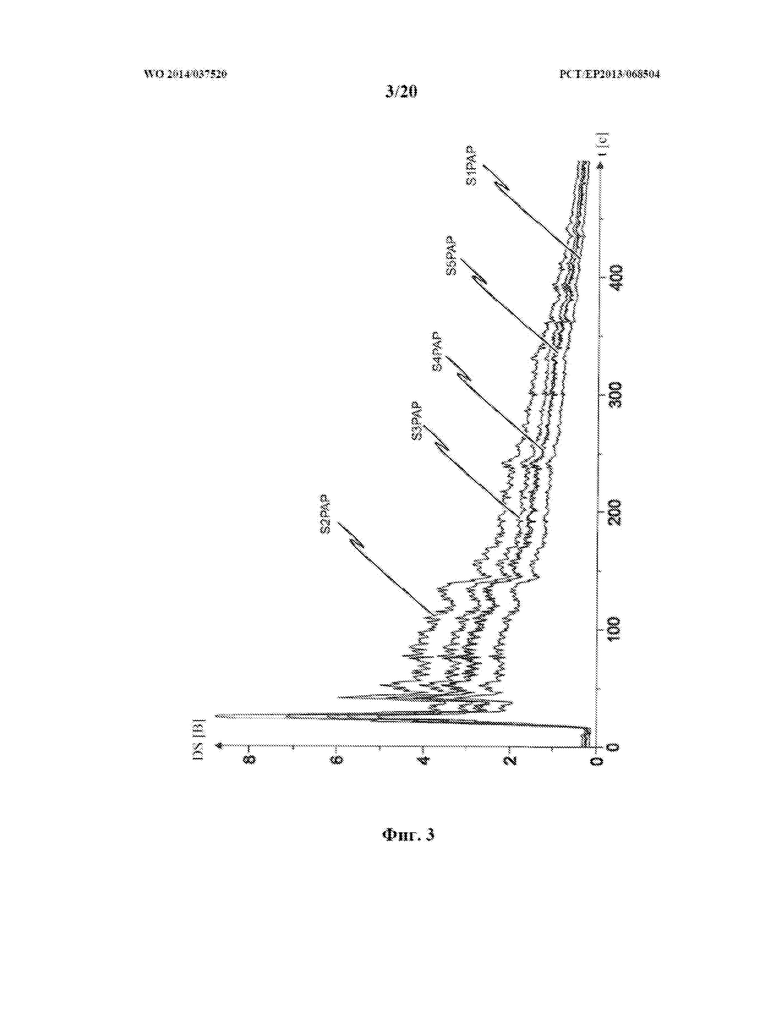
На фиг. 3 приведена диаграмма профилей сигналов оптических датчиков 21, 22, 23, 24, 25 из первого варианта осуществления, показанного на фиг. 1, при первом тестовом измерении по оси времени. Показаны выходные напряжения и/или напряжения обнаружения DS оптических датчиков 21, 22, 23, 24, 25. Первое тестовое измерение, показанное на фиг. 3, выполнено устройством в соответствии с первым вариантом осуществления во время открытого горения бумаги для получения характеристических эталонных профилей сигнала оптических датчиков 21, 22, 23, 24, 25, расположенных слева от оси падения на фиг. 1. В соответствии с настоящим изобретением оптический датчик 21 отнесен к профилю сигнала, обозначенному как S1 PAP; профили сигнала S2 PAP, S3 PAP, S4 PAP и S5 PAP аналогично соответствуют сигналам измерения, выданным оптическими датчиками 22, 23, 24, 25 за период от 0 приблизительно до 500 секунд. Здесь следует отметить, что при выборе достаточно высокой частоты дискретизации измерения дискретных по времени профилей сигналов могут, естественно, проводиться и так, что профили сигналов могут легко обрабатываться в дальнейшем в системе цифровой обработки.
Фиг. 4 иллюстрирует линии регрессии, связанные с фиг. 3, после соотнесения отдельных точек измерения по фиг. 3 с выходным сигналом S3 PAP опорного датчика 23. После выполненной таким образом нормализации сигналов измерения к выходному сигналу опорного датчика 23 наклон его линии наилучшей аппроксимации R3 PAP равен единице, а наклоны других линий наилучшей аппроксимации R1 PAP, R2 PAP, R4 PAP и R5 PAP, относящихся к оптическим датчикам 21, 22, 24 и 25, отличаются от единицы.
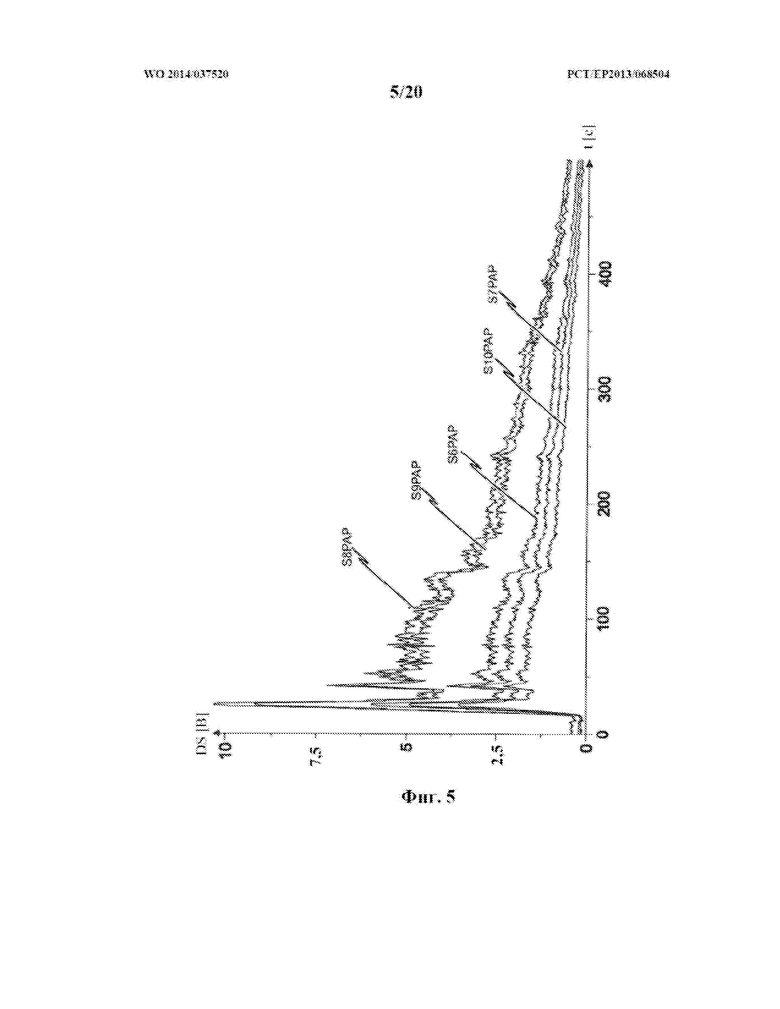
Фиг. 5 иллюстрирует профили сигналов оптических датчиков 26, 27, 28, 29, 30 справа от оси падения на фиг. 1 также при первом тестовом измерении во время вышеупомянутого открытого горения бумаги. В соответствии с настоящим изобретением профили сигнала S6 PAP, S7 PAP, S8 PAP, S9 PAP и S10 PAP соответствуют профилям сигналов, выданным оптическими датчиками 26, 27, 28, 29, 30.
Фиг. 6, в свою очередь, иллюстрирует соответствующие линии регрессии R6 PAP, R7 PAP, R8 PAP, R9 PAP и R10 PAP, которые опять-таки – аналогично фиг. 4 – соотнесены с профилем сигнала обнаружения опорного датчика 23 (т.е., профилем сигнала S3 PAP).
Наконец, фиг. 7 иллюстрирует соответствующий образец распределения линий регрессии по фиг. 4 и 6 при измерении рассеянного света во время горения бумаги. Наклоны MR линий регрессии по фиг. 4 и 6 показаны на фиг. 7 в виде гистограммы с индексом датчика IDX по оси абсцисс, на которой индексы датчиков 1-10 соответствуют оптическим датчикам 21-30.
Образец, полученный на фиг. 7, является характеристическим для распределения рассеянного света при горении бумаги и может использоваться для последующих сопоставлений с образцом, особенно и предпочтительно также для автоматических сопоставлений с образцом в соответственно исполненном оценочном блоке. В частности, если устройство, имеющее уменьшенное число датчиков в соответствии со вторым вариантом осуществления на фиг. 2, используется и при последующем реальном измерении, может использоваться распределение образцов по фиг. 7 (с правильно назначенными индексами датчиков). Таким образом, установлено, что, особенно при конкретном расположении датчиков в соответствии со вторым вариантом осуществления с фиг. 2, сигналы оптических датчиков 21, 23, 24 и 30, соответствующие индексам датчиков 1, 3, 4 и 10, достаточны для классификации типа пожара с достаточно высокой точностью при нормализации к профилю сигнала опорного датчика 23 (индекс датчика 3).
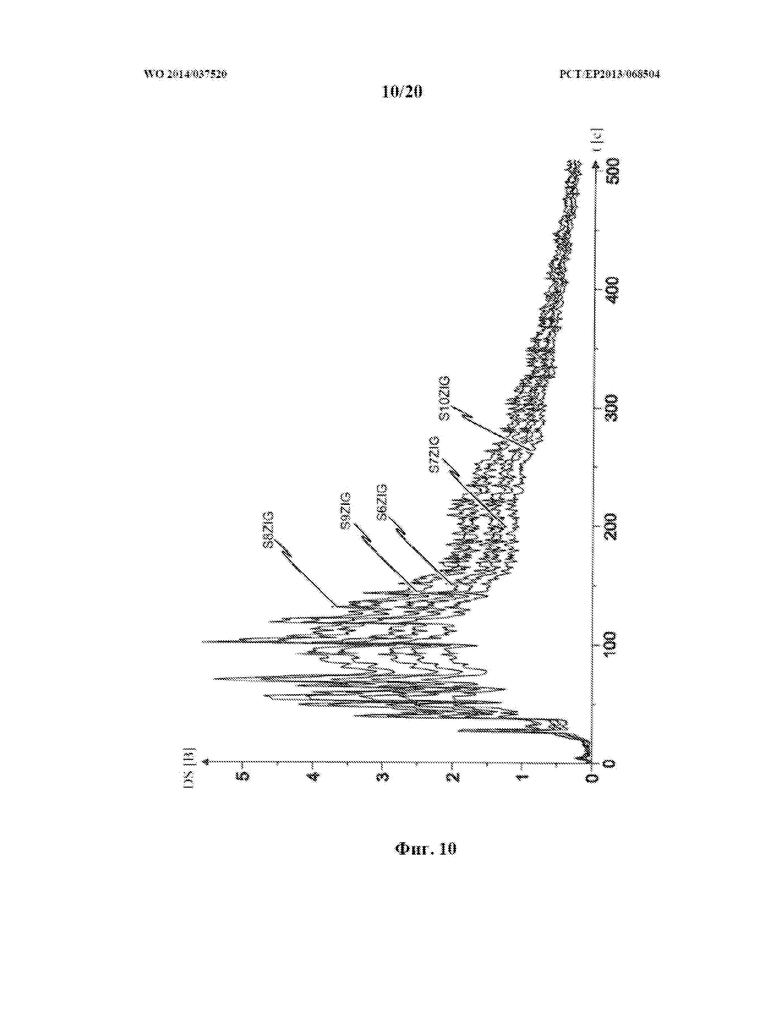
Фиг. 8-12 и 13-17 соответственно иллюстрируют образцы сигналов, их линии регрессии, а также их соотнесенные с наклоном распределения образцов для второго тестового измерения (горение сигарет, ZIG) и третьего тестового измерения (PVC - горение PVC). В частности, фиг. 8-10 иллюстрируют профили сигнала по результатам второго тестового измерения при горении сигарет за период от 0 до приблизительно 500 секунд отдельно в каждом случае для оптических датчиков 21, 22, 23, 24, 25 слева на фиг. 1 и оптических датчиков 26, 27, 28, 29, 30 справа на фиг. 1 с соответствующими (левая сторона) линиями регрессии на фиг. 9 и (правая сторона) линиями регрессии на фиг. 11. Регрессия опять-таки выполняется относительно сигнала оптического датчика 23, служащего в качестве опорного датчика (профиль сигнала S3 ZIG). Даже при чисто визуальном сравнении характеристический образец для горения сигарет на фиг. 12 явно отличается от характеристического образца на фиг. 7 для горения бумаги, что свидетельствует о пригодности предлагаемого устройства для обнаружения сигналов рассеянного света, у которого профили сигнала оптических датчиков служат при классификации типа любых частиц, которые могут присутствовать в зоне 15 рассеянного света. В свою очередь очевидно также, что для уменьшенного числа датчиков в соответствии со вторым вариантом осуществления на фиг. 2 (учитываются лишь индексы датчиков 1, 3, 4 и 10) достаточно лишь профилей наклонов, чтобы иметь возможность классифицировать тип пожара с высокой точностью.
Фиг. 13 и 15 опять-таки иллюстрируют профили сигналов левосторонних/правосторонних датчиков при тестовом измерении во время горения PVC с их соответствующими линиями регрессии (опять-таки соотнесенными с сигналом обнаружения оптического датчика 23, служащего в качестве опорного датчика) на фиг. 14 и 16. Сравнение с образцом наклонов MR линий регрессии во время горения PVC, как показано на фиг. 17, снова показывает, по сравнению с фиг. 7 и 12, явно отличающиеся характеристики рассеянного света, обеспечивающие высокую точность обнаружения и классификации.
Фиг. 18-20 разъясняют еще одно возможное применение сигналов измерения, отличающееся от линий регрессии, с использованием метода главных компонент (PCA).
Использование метода главных компонент является особенно преимущественным в настоящем случае, поскольку параметрический подход потребовал бы сложного и требующего большого объема обработки данных распознавания структуры математической системы источника света и датчиков рассеянного света. Метод главных компонент (PCA) обеспечивает понижение размерности на основании исключительно статистических методов.
Фиг. 18-20 иллюстрируют отдельные кластеры BUC, BAU, PUR, HEP, ABS, PAP, PAE, PVC, ZIG, ZRE, MEH, ZEM, TEP эталонных профилей сигналов по методу главных компонент, сведенные к трем главным компонентам PC1, PC2, PC3, причем фиг. 18 иллюстрирует главную компоненту 2 (PC2) как функцию главной компоненты 1 (PC1), фиг. 19 иллюстрирует главную компоненту 3 (PC3) как функцию главной компоненты 1 (PC1), а фиг. 20 иллюстрирует главную компоненту 3 (PC3) как функцию главной компоненты 2 (PC2). При этом отдельные кластеры BUC, BAU, PUR, HEP, ABS, PAP, PAE, PVC, ZIG, ZRE, MEH, ZEM, TEP соответствуют характеристикам следующих типов пожара:
При проведении измерений реальных пожаров предлагаемым устройством для обнаружения сигналов рассеянного света проводится оценка, основанная на кластерах по фиг. 18-20, с использованием метода главных компонент путем определения расстояния распределения профилей обнаруженных сигналов (измеренный кластер), полученных методом главных компонент, с кластерами образца сигнала на фиг. 18-20 (кластеры образцов).
Метод главных компонент в соответствии с настоящим изобретением обеспечивает преимущество, заключающееся в относительно простом понижении размерности со связанным с этим преимущественным уменьшением шума, при котором (понижении) принимаются во внимание по существу лишь те компоненты сигналов, которые относятся к классификации пожара или частиц соответственно.
Здесь следует отметить, что все элементы, описанные выше отдельно и в любом сочетании, в частности, специфические элементы, показанные на чертежах, заявляются как являющиеся существенными для изобретения, модификации которых будут известны специалисту в области техники.
Перечень позиций
DS
сигнал обнаружения
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕТЕКТОР РАССЕЯННОГО СВЕТА И АСПИРАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ ПОЖАРА С ДЕТЕКТОРОМ РАССЕЯННОГО СВЕТА | 2019 |
|
RU2814440C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ БИОЛОГИЧЕСКОГО МАТЕРИАЛА | 2011 |
|
RU2559521C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МИНИАТЮРНЫЙ ОПТИЧЕСКИЙ ДАТЧИК ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ МИКРО- И МАКРООБЪЕКТОВ И ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ОБНАРУЖЕННЫХ ОБЪЕКТОВ | 2020 |
|
RU2736920C1 |
| ОПТИЧЕСКИЙ КОНТРОЛЬ ПРОЗРАЧНОЙ ТАРЫ С ИСПОЛЬЗОВАНИЕМ ДВУХ КАМЕР И ОДНОГО ИСТОЧНИКА СВЕТА | 1999 |
|
RU2223480C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ДЕТЕКТИРОВАНИЯ ИДЕНТИФИКАТОРА АЛМАЗА | 2017 |
|
RU2702803C1 |
| Устройство обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2746089C1 |
| УСТРОЙСТВО ДЛЯ ВИДЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2022 |
|
RU2794167C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ЛИНЕЙНОЙ ПОЛЯРИЗАЦИИ СВЕТА ПРИ ОТРАЖЕНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2109256C1 |
| СПОСОБ ПРОВЕДЕНИЯ АНАЛИЗОВ КРОВИ И АНАЛИЗАТОР КРОВИ | 2007 |
|
RU2347224C2 |
| УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОЙ СПЕКТРОСКОПИИ ВЕЩЕСТВ | 2004 |
|
RU2290625C2 |












Группа изобретений относится к оптическим датчикам. Устройство для обнаружения сигналов рассеянного света содержит источник света (10), излучающий свет в одной зоне (15) рассеянного света, при этом падающий свет определяет ось падения (11), несколько оптических датчиков (21-30) для обнаружения рассеянного света, каждый из которых расположен под углом (W1-W10) датчика относительно оси падения (11)), при этом по меньшей мере один из нескольких оптических датчиков (21-30) является опорным датчиком рассеянного света, и оценочный блок для оценки сигналов, обнаруженных оптическими датчиками, при этом для классификации типа любой частицы, оценочный блок выполнен с возможностью соотнесения профилей сигналов других оптических датчиков (21-30) с профилем сигнала по меньшей мере одного опорного датчика. Способ обнаружения сигналов рассеянного света включает следующие этапы: подача света в зону (15) рассеянного света, при этом падающий свет определяет ось падения (11), и обнаружение рассеянного света, отражаемого от любых частиц, которые могут присутствовать в зоне (15) рассеянного света, посредством нескольких оптических датчиков (21-30), каждый из которых расположен под углом (W1-W10) датчика относительно оси (11) падения. Технический результат заключается в повышение точности обнаружения сигналов рассеянного света. 3 н. и 26 з.п. ф-лы, 20 ил.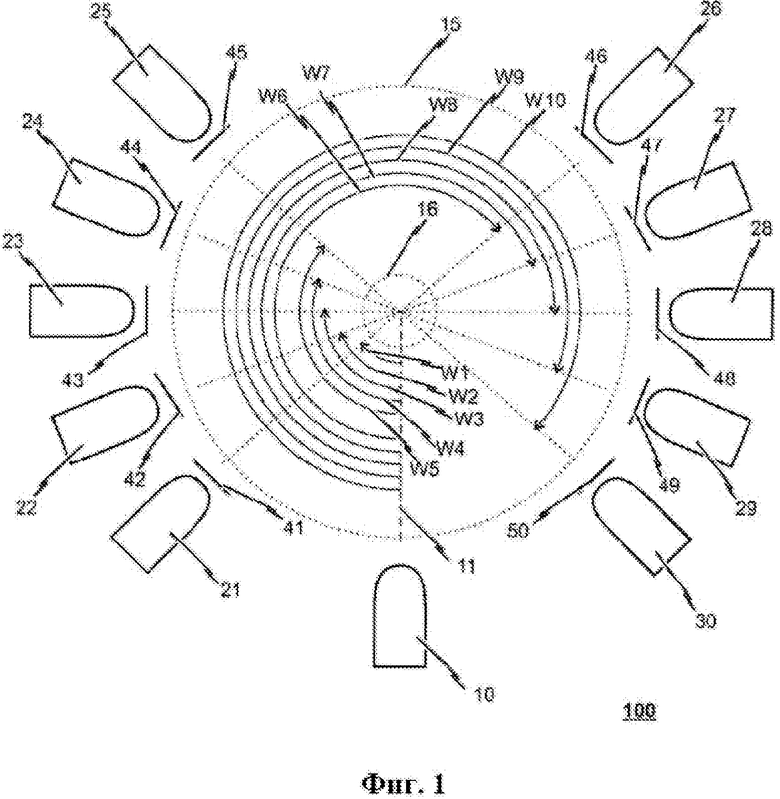
1. Устройство (100) для обнаружения сигналов рассеянного света, отличающееся тем, что содержит следующее:
источник (10) света;
несколько оптических датчиков (21, 22, 23, 24, 25, 26, 27, 28, 29, 30) для обнаружения рассеянного света; и
оценочный блок для оценки сигналов, обнаруженных оптическими датчиками,
при этом источник (10) света излучает свет в одной зоне (15) рассеянного света, при этом падающий свет определяет ось (11) падения,
при этом каждый из оптических датчиков (21, 22, 23, 24, 25, 26, 27, 28, 29, 30) расположен под углом (W1, W2, W3, W4, W5, W6, W7, W8, W9, W10) датчика относительно оси (11) падения для обнаружения рассеянного света из зоны (15) рассеянного света,
при этом по меньшей мере один из нескольких оптических датчиков (21, 22, 23, 24, 25, 26, 27, 28, 29, 30) является опорным датчиком,
при этом для классификации типа любой частицы, которая может присутствовать в зоне (15) рассеянного света, оценочный блок выполнен с возможностью соотнесения профилей сигналов других оптических датчиков (21, 22, 23, 24, 25, 26, 27, 28, 29, 30) с профилем сигнала по меньшей мере одного опорного датчика.
2. Устройство (100) по п. 1, отличающееся тем, что оценочный блок дополнительно выполнен с возможностью проведения, предпочтительно автоматически, различия между параметром пожара и ложной переменной в зависимости от классифицированного типа частицы.
3. Устройство (100) по п. 1 или 2, отличающееся тем, что дополнительно предусмотрено устройство аварийной сигнализации, предназначенное для подачи, предпочтительно автоматически, сигнала тревоги в зависимости от классифицированного типа частицы.
4. Устройство (100) по п. 3, отличающееся тем, что тип (типы) частиц, на основе которых устройство аварийной сигнализации будет подавать сигнал тревоги, предварительно определен (определены) или может (могут) предварительно определяться.
5. Устройство (100) по п. 3, отличающееся тем, что устройство аварийной сигнализации предназначено для подачи сигнала тревоги независимо от порогового значения.
6. Устройство (100) по п. 3, отличающееся тем, что устройство аварийной сигнализации выполнено с возможностью подачи разных сигналов, в частности сигналов тревоги или сигналов отбоя после тревоги, в зависимости от классифицированного типа частиц.
7. Устройство (100) по п. 1, отличающееся тем, что один датчик (23) из нескольких оптических датчиков (21, 22, 23, 24, 25, 26, 27, 28, 29, 30), расположенный по существу под прямым углом (W3) датчика, является опорным датчиком.
8. Устройство (100) по п. 1, отличающееся тем, что оценочный блок дополнительно выполнен с возможностью сравнения данных, полученных из профилей сигналов, обнаруженных несколькими оптическими датчиками (21, 22, 23, 24, 25, 26, 27, 28, 29, 30), с образцами сигналов и подачи сигнала идентификации, идентифицирующего классифицированный тип частицы при достаточно высокой степени соответствия образцу сигнала.
9. Устройство (100) по п. 1, отличающееся тем, что оценочный блок дополнительно выполнен с возможностью определения уровня частиц в зависимости от интенсивности рассеянного света, обнаруженной опорным датчиком.
10. Устройство (100) по п. 1, отличающееся тем, что оценочный блок дополнительно выполнен с возможностью не выполнять сопоставление с образцом, пока уровень частиц не превысит минимальный уровень частиц.
11. Устройство (100) по п. 1, отличающееся тем, что источник (10) света излучает по существу монохроматический свет в диапазоне длин волн от приблизительно 560 до приблизительно 420 нанометров.
12. Устройство (100) по п. 1, отличающееся тем, что по меньшей мере один из оптических датчиков (21, 22, 23, 24, 25, 26, 27, 28, 29, 30) содержит поляризационный светофильтр (41, 42, 43, 44, 45, 46, 47, 48, 49, 50), предназначенный для поляризации подлежащего обнаружению рассеянного света.
13. Устройство (100) по п. 12, отличающееся тем, что каждый из нескольких оптических датчиков (21, 22, 23, 24, 25, 26, 27, 28, 29, 30) содержит поляризационный светофильтр (41, 42, 43, 44, 45, 46, 47, 48, 49, 50), при этом плоскости поляризации по меньшей мере двух поляризационных светофильтров (41, 42, 43, 44, 45, 46, 47, 48, 49, 50) расположены по существу перпендикулярно друг другу.
14. Устройство (100) по п. 12, отличающееся тем, что каждый из оптических датчиков (21, 22, 23, 24, 25, 26, 27, 28, 29, 30) содержит поляризационный светофильтр (41, 42, 43, 44, 45, 46, 47, 48, 49, 50), причем плоскости поляризации по меньшей мере двух поляризационных светофильтров (41, 42, 43, 44, 45, 46, 47, 48, 49, 50) расположены по существу перпендикулярно друг другу.
15. Устройство (100) по п. 1, отличающееся тем, что каждый из оптических датчиков (21, 22, 23, 24, 25, 26, 27, 28, 29, 30) по существу направлен в сторону общей области (16) обнаружения зоны (15) рассеянного света.
16. Устройство (100) по п. 1, отличающееся тем, что отдельный или все оптические датчики (21, 22, 23, 24, 25, 26, 27, 28, 29, 30) конструктивно исполнен/исполнены как фотодиод/фотодиоды, и/или источник (10) света представляет собой светоизлучающий диод.
17. Устройство (100) по п. 1, отличающееся тем, что устройство содержит один оптический датчик (21) под первым углом (W1) датчика, один оптический датчик (30) под вторым углом (W10) датчика и один оптический датчик (24) под третьим углом (W4) датчика, причем первый угол (W1) датчика представляет собой острый угол и вместе со вторым углом (W10) датчика составляет в сумме 360°, при этом третий угол (W4) датчика представляет собой тупой угол.
18. Устройство (100) по п. 17, отличающееся тем, что первый угол (W1) датчика составляет приблизительно 45°, а второй угол (W10) датчика составляет приблизительно 315°, при этом третий угол (W4) датчика составляет приблизительно 112°.
19. Устройство (100) по п. 17 или 18, отличающееся тем, что опорный датчик (23), оптический датчик (21) под первым углом (W1) датчика, оптический датчик (30) под вторым углом (W10) датчика и оптический датчик (24) под третьим углом (W4) датчика, каждый, содержат поляризационный светофильтр, при этом поляризационные светофильтры (43, 41, 44) опорного датчика (23), оптического датчика (21) под первым углом (W1) датчика и оптического датчика (24) под третьим углом (W4) датчика выровнены относительно друг друга в первой плоскости поляризации, при этом поляризационный светофильтр (50) оптического датчика (30) под вторым углом (W10) датчика выровнен во второй плоскости поляризации, перпендикулярной первой плоскости поляризации.
20. Устройство (100) по п. 1, отличающееся тем, что оценочный блок выполнен с возможностью определения степени соответствия путем корреляции данных, полученных из распределения профилей обнаруженных сигналов в соответствии с методом главных компонент по кластерам (BUC, BAU, PUR, HEP, ABS, PAP, PAE, PVC, ZIG, ZRE, MEH, ZEM, TEP) образцов сигналов.
21. Устройство (100) по п. 1, отличающееся тем, что оценочный блок предназначен для определения степени соответствия путем определения расстояния между точками данных, полученных из распределения профилей обнаруженных сигналов в соответствии с методом главных компонент по кластерам (BUC, BAU, PUR, HEP, ABS, PAP, PAE, PVC, ZIG, ZRE, MEH, ZEM, TEP) образцов сигналов.
22. Устройство (100) по п. 1, отличающееся тем, что оценочный блок предназначен для определения степени соответствия посредством оценки с помощью нейронной сети данных, полученных из распределения профилей обнаруженных сигналов в соответствии с методом главных компонент по кластерам (BUC, BAU, PUR, HEP, ABS, PAP, PAE, PVC, ZIG, ZRE, MEH, ZEM, TEP) образцов сигналов.
23. Устройство (100) по п. 1, отличающееся тем, что образцы сигналов соответствуют сигналам распределения частиц в случае одной или нескольких ситуаций из группы, включающей:
выброс пыли;
выброс пара;
выброс табачного дыма;
тлеющее горение бумаги;
тлеющее горение картона;
открытое горение бумаги;
открытое горение картона;
горение ABS;
горение н-гептана;
горение PVC;
горение хлопка;
горение дерева;
другие выбросы частиц.
24. Устройство (100) по п. 1, отличающееся тем, что устройство применимо в аспирационной системе обнаружения пожара, при этом аспирационная система обнаружения пожара содержит активный источник воздуха для подачи воздуха, подлежащего классификации, в зону (15) рассеянного света.
25. Способ обнаружения сигналов рассеянного света, отличающийся тем, что способ включает следующие этапы:
подача света в зону (15) рассеянного света, при этом падающий свет определяет ось (11) падения; и
обнаружение рассеянного света, отражаемого от любых частиц, которые могут присутствовать в зоне (15) рассеянного света, посредством нескольких оптических датчиков (21, 22, 23, 24, 25, 26, 27, 28, 29, 30), предпочтительно несколькими фотодиодами, каждый из которых расположен под углом (W1, W2, W3, W4, W5, W6, W7, W8, W9, W10) датчика относительно оси (11) падения,
при этом дополнительно включает дополнительный этап способа:
соотнесение профилей сигналов оптических датчиков (21, 22, 23, 24, 25, 26, 27, 28, 29, 30) с профилем сигнала опорного датчика для классификации типа частицы, которая может присутствовать в зоне (15) рассеянного света.
26. Способ по п. 25, отличающийся тем, что дополнительно включает следующий этап способа:
определение уровня частиц в зависимости от интенсивности рассеянного света, обнаруженной опорным датчиком.
27. Способ по п. 25 или 26, отличающийся тем, что способ дополнительно включает следующие этапы:
сравнение данных, полученных из сигналов, обнаруженных из профилей сигналов с помощью профиля сигнала опорного датчика, с образцами сигналов; и
при достаточно высокой степени соответствия одному из указанных образцов сигналов выдача сигнала идентификации в систему инертизации для избирательного управляемого уменьшения содержания кислорода в закрытом помещении, при этом сигнал идентификации идентифицирует тип частицы, как классифицированный.
28. Система инертизации для избирательно управляемого автоматического уменьшения содержания кислорода в закрытом помещении и для поддерживания уменьшенного содержания кислорода в течение определенного или определяемого периода времени, отличающаяся тем, что содержит устройство для обнаружения сигналов рассеянного света по п. 1, при этом система инертизации предназначена для установки содержания кислорода в зависимости от управляющего сигнала.
29. Система инертизации по п. 28, отличающаяся тем, что управляющий сигнал представляет собой сигнал идентификации, идентифицирующий классифицированную частицу, и система инертизации предназначена для автоматической установки уменьшенного содержания кислорода и поддерживания его в течение определенного или определяемого периода времени.
| Способ заполнения плавкого предохранителя наполнителем | 1987 |
|
SU1408469A1 |
| DE 102010039230 B3, 26.01.2012 | |||
| Устройство для регулировки размеров растра | 1939 |
|
SU64409A1 |
| DE 10359782 A1, 21.07 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 6828913 B2, 07.12.2004. | |||

