ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится в общем к технологии быстрого досмотра транспортного средства на основе радиационного сканирования, и более конкретно к способу и системе быстрого досмотра транспортного средства на основе устройства для измерения длины.
УРОВЕНЬ ТЕХНИКИ
В области техники быстрого досмотра транспортного средства на основе радиационного сканирования современная тенденция заключается в обследовании подлежащего досмотру транспортного средства, когда оно находится в движении, поскольку это может существенно повысить эффективность проверки безопасности. Однако поскольку радиационное излучение высокой энергии наносит вред человеческому организму, во время инспектирования подлежащего досмотру транспортного средства кабина (т.е. головная часть транспортного средства) должна быть защищена от излучения, чтобы не подвергать водителя радиационному излучению высокой энергии.
В настоящее время наиболее часто используемый способ заключается в обнаружении положения транспортного средства с помощью множества фотоэлектрических переключателей или световых завес, и наземных сенсорных обмоток, установленных в инспекционном канале, при этом, когда кабина проходит область излучения радиационного пучка (т.е. область сканирования с использованием радиационного излучения), источником радиационного излучения управляют так, чтобы пучок излучался для сканирования отсека позади кабины. Однако при проведении измерений с помощью оптических переключателей или световой завесы часто появляются ошибки, что подвергает водителя существенной опасности.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В свете вышесказанного в настоящем раскрытии предложены система и способ для быстрого досмотра транспортного средства, позволяющие быстро и точно распознать подлежащее досмотру транспортное средство и проинспектировать подлежащее досмотру транспортное средство безопасным образом.
Дополнительные аспекты и преимущества настоящего изобретения будут частично изложены в нижеследующем описании и отчасти станут очевидными из этого описания, либо могут быть усвоены при практическом осуществлении настоящего изобретения.
В одном аспекте настоящего изобретения предложен способ быстрого досмотра транспортного средства, примененный в системе быстрого досмотра транспортного средства. Способ включает в себя: когда подлежащее досмотру транспортное средство попадает в зону досмотра, измерение первой длины и второй длины подлежащего досмотру транспортного средства; определение, превышает ли первая длина заданное пороговое значение первой длины или равна ему, и превышает ли вторая длина заданное пороговое значение второй длины или равна ему; если первая длина превышает пороговое значение первой длины или равна ему, а вторая длина превышает пороговое значение второй длины или равна ему, определение, появляется ли участок зазора подлежащего досмотру транспортного средства между первым участком и вторым участком подлежащего досмотру транспортного средства в области излучения пучка, образованной пучком радиационного излучения, излучаемого системой для быстрого досмотра транспортного средства; и если участок зазора появляется в области излучения пучка, излучение пучка радиационного излучения первой дозы радиации на подлежащее досмотру транспортное средство согласно участку зазора, при этом подлежащее досмотру транспортное средство перемещается относительно системы быстрого досмотра транспортного средства.
В другом аспекте настоящего изобретения предложена система быстрого досмотра транспортного средства, включающая в себя: устройство радиационной визуализации, содержащее источник радиационного излучения, выполненный с возможностью излучения пучка радиационного излучения для инспектирования подлежащего досмотру транспортного средства; детектор, выполненный с возможностью обнаружения радиационного излучения, прошедшего через подлежащее досмотру транспортное средство, и/или рассеянного радиационного излучения; и устройство обработки изображения, выполненное с возможность формирования изображения согласно сигналам радиационного излучения, распознанным детектором; устройство для измерения длины, выполненное с возможностью измерения первой длины и второй длины подлежащего досмотру транспортного средства, когда подлежащее досмотру транспортное средство попадает в зону досмотра; и управляющее устройство, выполненное с возможностью определения, превышает ли первая длина заданное пороговое значение первой длины или равна ему, и превышает ли вторая длина заданное пороговое значение второй длины или равна ему; если первая длина превышает пороговое значение первой длины или равна ему, а вторая длина превышает пороговое значение второй длины или равна ему, определение, появляется ли участок зазора подлежащего досмотру транспортного средства между первым участком и вторым участком подлежащего досмотру транспортного средства в области излучения пучка, образованной пучком радиационного излучения; и когда участок зазора появляется в конечной точке области излучения пучка, управление устройством радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации на подлежащее досмотру транспортное средство согласно участку зазора, при этом подлежащее досмотру транспортное средство перемещается относительно устройства измерения длины.
Таким образом, в способе и системе быстрого досмотра транспортного средства, предложенных в соответствии с настоящим изобретением, измеряется длина участков подлежащего досмотру транспортного средства; когда длины удовлетворяют заданным условиям, может быть распознан участок зазора подлежащего досмотру транспортного средства. Таким образом, временная привязка для излучения пучка радиационного излучения может определяться точно, что позволяет избежать риска для безопасности водителя вследствие ошибок в определении головной части подлежащего досмотру транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеперечисленные и другие признаки и преимущества настоящего изобретения станут очевидными из примеров осуществления, описанных подробно со ссылкой на сопровождающие чертежи.
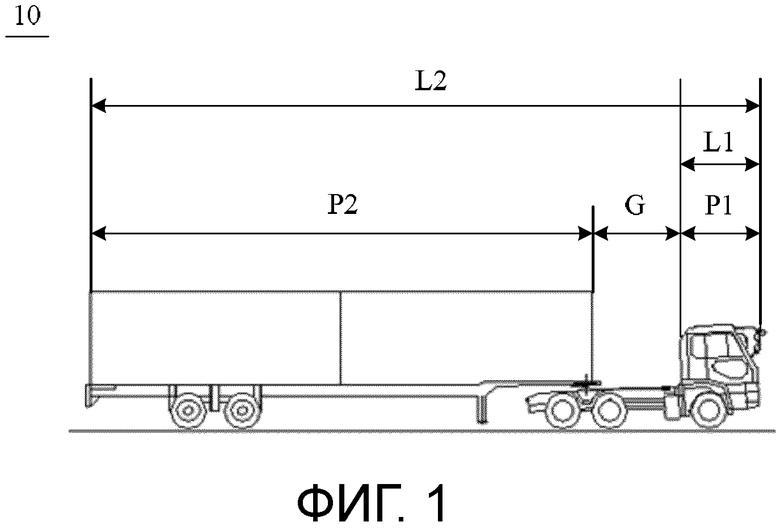
На Фиг. 1 показан вид сбоку подлежащего досмотру транспортного средства согласно одному примеру.
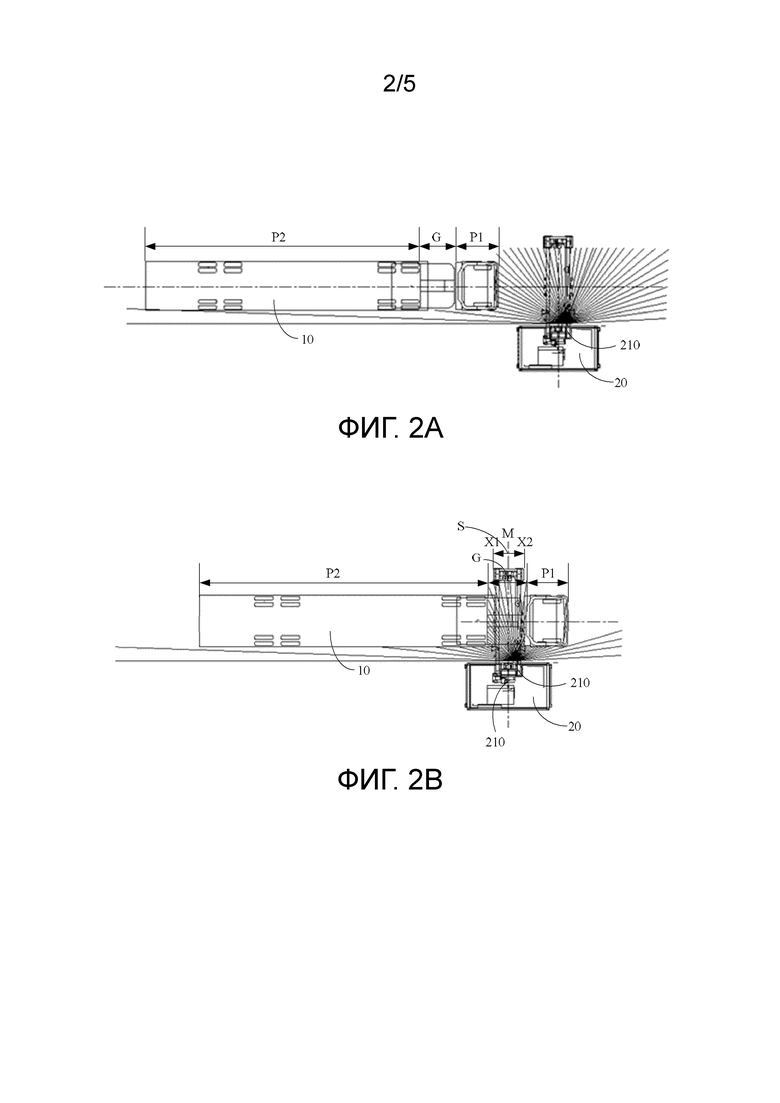
На Фиг. 2A и на Фиг. 2B показаны схемы, демонстрирующие способ быстрого досмотра транспортного средства в различных рабочих состояниях согласно одному примеру осуществления.
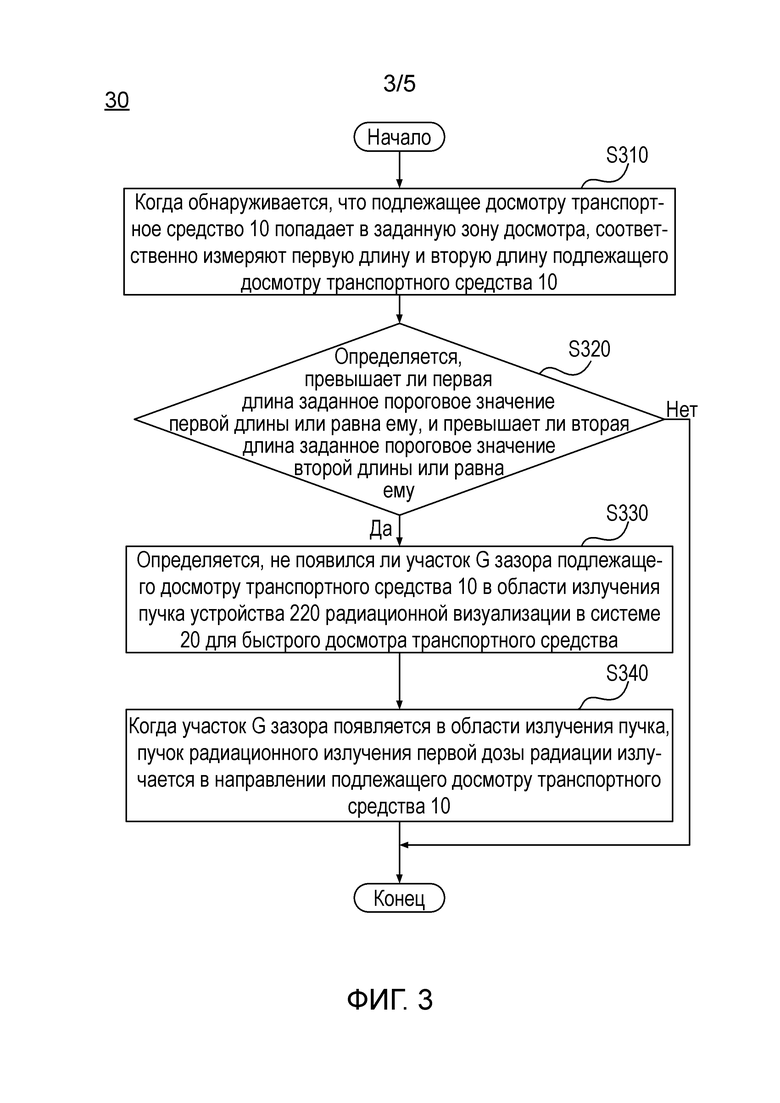
На Фиг. 3 показана блок-схема, иллюстрирующая способ быстрого досмотра транспортного средства согласно одному примеру осуществления.
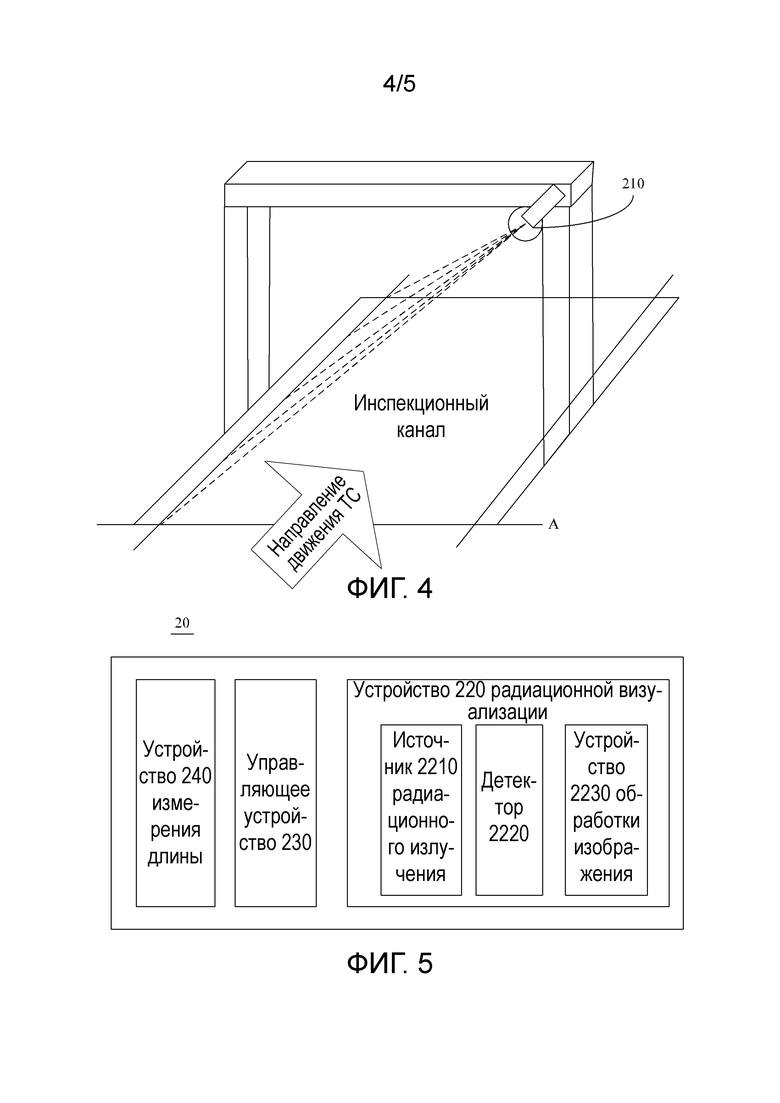
На Фиг. 4 показана схема, демонстрирующая область, распознаваемую лазерным сканером согласно одному примеру.
На Фиг. 5 показана блок-схема, иллюстрирующая систему для быстрого досмотра транспортного средства согласно одному примеру осуществления.
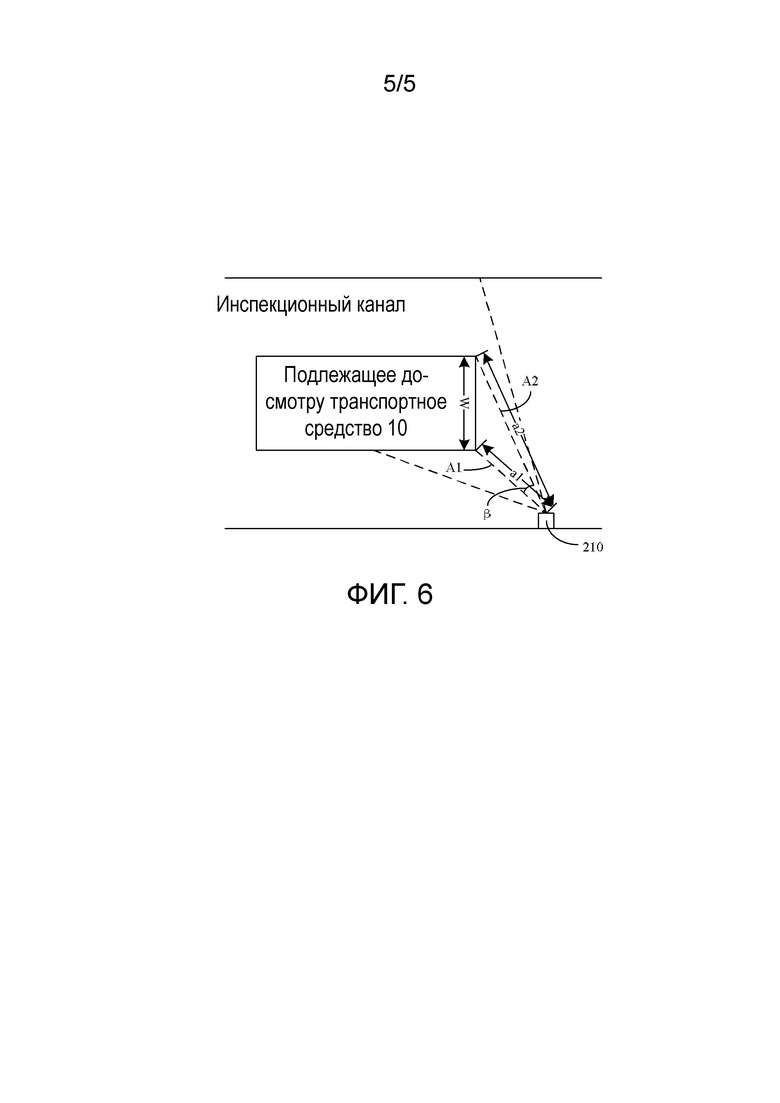
На Фиг. 6 показана схема, демонстрирующая измерение ширины с помощью лазерного сканера согласно одному примеру.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Ниже примеры осуществления будут описаны более полно со ссылкой на сопровождающие чертежи. Однако примеры осуществления могут быть реализованы различными способами и не ограничены вариантами осуществления, представленными в настоящем описании. На самом деле, данные варианты осуществления предложены для того, чтобы глубже и полнее представить настоящее изобретение, и более полно передать идею примеров осуществления специалистам в данной области техники. На всех сопровождающих чертежах схожие символы представляют схожие или одинаковые конструкции, что позволяет избежать повторений в описании.
Описанные признаки, конструкции и характеристики могут объединяться в одном или более вариантах осуществления любым пригодным образом. В последующем описании для обеспечения полного понимания вариантов осуществления настоящего изобретения предложено больше конкретных деталей. Однако специалистам в данной области техники следует понимать, что техническое решение в настоящем изобретении может быть реализовано на практике без одной или более конкретных деталей или реализовано другими способами, с использованием других компонентов и т.д. В некоторых случаях известные конструкции или рабочие операции подробно не иллюстрируются, чтобы не затемнять смысл в настоящем изобретении.
На Фиг. 1 показан вид сбоку подлежащего досмотру транспортного средства согласно одному примеру. Как показано на Фиг. 1, подлежащее досмотру транспортное средство 10, например фургон с грузовым отсеком или грузовик, имеющий контейнер, включает в себя первый участок P1 (например, кабину, т.е. головную часть), второй участок P2 (например, участок с грузовым отсеком), и участок G зазора между первым участком P1 и вторым участком P2. Для грузовика, имеющего контейнер, обычно участок G зазора имеет длину около 1 метра. Для фургона с грузовым отсеком участок G зазора имеет длину примерно от нескольких сантиметров до десятков сантиметров.
В способе быстрого досмотра транспортного средства согласно настоящему изобретению подлежащее досмотру транспортное средство может перемещаться относительно системы быстрого досмотра транспортного средства. В одном варианте осуществления подлежащее досмотру транспортное средство может совершать движение через стационарную систему для быстрого досмотра транспортное средство, в другом же варианте осуществления подлежащее досмотру транспортное средство может быть неподвижным, а система быстрого досмотра транспортного средства может обследовать транспортное средство при перемещении системы.
Вообще способ быстрого досмотра транспортного средства согласно настоящему изобретению будет описан ниже на примере, в котором подлежащее досмотру транспортное средство перемещается через стационарную систему для быстрого досмотра транспортного средства.
На Фиг. 2A и на Фиг. 2B показаны схемы, демонстрирующие способ быстрого досмотра транспортного средства в различных рабочих состояниях согласно одному примеру осуществления. На Фиг. 3 показана блок-схема алгоритма, иллюстрирующая способ быстрого досмотра транспортного средства согласно одному примеру осуществления. Со ссылкой совместно на Фиг. 2A, 2B и 3 способ 30 включает в себя следующие этапы.
На этапе S310, когда обнаруживается, что подлежащее досмотру транспортное средство 10 попадает в заданную зону досмотра, соответственно измеряют первую длину и вторую длину подлежащего досмотру транспортного средства 10.
Например, система 20 для быстрого досмотра транспортного средства включает в себя устройство для измерения длины. Устройство для измерения длины включает в себя, например, лазерный сканер или камеру 3D визуализации и т.п. Система 20 для быстрого досмотра транспортного средства измеряет подлежащее досмотру транспортное средство 10, попадающее в заданную зону досмотра, применяя устройство для измерения длины. Заданная зона досмотра может представлять собой, например, область, распознаваемую устройством для измерения длины. Например, устройство для измерения длины представляет собой лазерный сканер, при этом на Фиг. 4 показана схема, демонстрирующая область, распознаваемую лазерным сканером 210. Как показано на Фиг. 4, лазерный сканер 210 может располагаться на боковой стороне инспекционного канала, чтобы измерять ширину подлежащего досмотру транспортного средства 10 в дополнение к высоте и длине подлежащего досмотру транспортного средства 10. Вообще лазерный сканер 210 сканирует подлежащее досмотру транспортное средство 10 с помощью лазера с заданной частотой сканирования, например 100Гц (т.е. 100 раз за одну секунду). Лазерный сканер 210 единовременно излучает лазерный пучок, содержащий множество лазерных лучей под разными углами, при этом множество лазерных лучей образуют плоскость, покрывающую некоторый диапазон, имеющий начальную точку A. Начальная точка A отмечает начало области распознавания лазерного сканера 210. Зона досмотра является также областью распознавания лазерного сканера 210. В качестве альтернативы лазерный сканер 210 может также располагаться сверху инспекционного канала.
Лазерный сканер в качестве устройства для измерения длины легко монтируется и имеет низкую стоимость. На практике нет необходимости строго отслеживать угол наклона датчика согласно требованиям правил монтажа. Установочный угол наклона не повлияет на требуемую точность и алгоритм. Кроме того, лазерный сканер обладает широким диапазоном измерения и может непрерывно контролировать диапазон длиной 80 метров или даже более.
В другом варианте осуществления вышеописанное устройство для измерения длины может также представлять собой камеру 3D визуализации. В этом случае камерой 3D визуализации может захватываться трехмерное изображение, чтобы измерять длину подлежащего досмотру транспортного средства и выполнять другие измерения.
В одном варианте осуществления попадание подлежащего досмотру транспортного средства 10 в заданную зону досмотра может обнаруживаться с помощью фотоэлектрического переключателя, световой завесы, лазерного датчика, радиолокационного датчика или лазерного сканера. Если для такого обнаружения используется лазерный сканер, для этой цели может применяться вышеописанный лазерный сканер 210 для измерения длины подлежащего досмотру транспортного средства, либо для проведения обнаружения может устанавливаться дополнительный лазерный сканер.
Возвращаясь к Фиг. 2A, в зону досмотра целиком зашло подлежащее досмотру транспортное средство 10, т.е. полностью все подлежащее досмотру транспортное средство 10 поступило в распознаваемый диапазон лазерного сканера. Лазерный сканер 210 может непрерывно сканировать подлежащее досмотру транспортное средство 10 с помощью лазера с заданной частотой сканирования. Согласно собранным и выданным данным в результате сканирования подлежащего досмотру транспортного средства 10 с помощью лазерного пучка, излучаемого из лазерного сканера 210, может быть образовано двумерное изображение подлежащего досмотру транспортного средства 10. Согласно двумерному изображению подлежащего досмотру транспортного средства 10 могут быть соответственно распознаны первый участок P1, второй участок P2, и участок G зазора подлежащего досмотру транспортного средства 10, при этом может быть измерена длина каждого из участков.
В некоторых вариантах осуществления, как показано на Фиг. 1, упомянутая первая длина представляет собой длину L1 первого участка P1 подлежащего досмотру транспортного средства 10, а упомянутый вторая длина представляет собой общую длину L2 подлежащего досмотру транспортного средства 10, т.е. суммарную длину первого участка P1, второго участка P2, и участка G зазора подлежащего досмотру транспортного средства 10.
В некоторых вариантах осуществления упомянутая первая длина представляет собой длину первого участка P1 подлежащего досмотру транспортного средства 10, а упомянутый вторая длина может также представлять собой длину второго участка P2 подлежащего досмотру транспортного средства 10.
В некоторых вариантах осуществления в системе 20 для быстрого досмотра транспортного средства может также применяться лазерный сканер для измерения ширины подлежащего досмотру транспортного средства 10. В этом случае, когда упомянутое устройство для измерения длины является лазерным сканером, лазерный сканер для измерения ширина может представлять собой тот же лазерный сканер, что и упомянутый лазерный сканер для измерения длины, либо может быть другим лазерным сканером. Например, как показано на Фиг. 4 на примере лазерного сканера 210, выполненного с возможностью измерения одновременно ширины и длины, когда лазерный сканер для измерения ширины и лазерный сканер для измерения длины представляют собой один и тот же лазерный сканер 210, лазерный сканер 210 может располагаться сбоку (или на боковой стенке) инспекционного канала, чтобы измерять как длину, так и ширину подлежащего досмотру транспортного средства 10.
На Фиг. 6 показана схема, изображающая лазерный сканер 210, измеряющий ширину W подлежащего досмотру транспортного средства 10. Как показано на Фиг. 6, лазерный сканер 210 может вычислить ширину W подлежащего досмотру транспортного средства 10 согласно длине a1 лазерного луча A1, длине a2 лазерного луча A2 и углу β между лазерным лучом A1 и лазерным лучом A2. Кроме того, измерение ширины может быть результатом одного измерения либо может представлять собой подобранный результат (например, среднее значение) комбинации нескольких измерений, при этом настоящее изобретение этим не ограничивается.
На этапе S320 определяется, превышает ли первая длина заданное пороговое значение первой длины или равна ему, и превышает ли вторая длина заданное пороговое значение второй длины или равна ему, при этом, если первая длина превышает пороговое значение первой длины или равна ему, а вторая длина превышает пороговое значение второй длины или равна ему, осуществляется переход к выполнению этапа S330, в противном случае осуществление способа завершается.
Путем определения того, превышают ли первая длина и вторая длина заданные пороговые значения, можно быстро распознать транспортное средство, имеющее участок G зазора. Например, первая длина P1 имеет длину L1, а вторая длина имеет общую длину L2. Длина L1 отрезка P1 обычно составляет от 1,3 метра до 5,2 метра, а общая длина L2 обычно составляет от 5,4 метра до 18 метров. Таким образом, пороговое значение первого первой длины может задаваться от 1,5 метра до 2,7 метра, а пороговое значение второй длины может задаваться от 6 метров до 10 метров. Следует отметить, что данные пороговые значения приведены лишь в качестве примера, при этом настоящее изобретение ими не ограничивается. Пороговые значения могут задаваться согласно практическим требованиям при их применении.
В некоторых вариантах осуществления перед этапом S320 способ также включает в себя: определяется, превышает ли ширина подлежащего досмотру транспортного средства 10 заданное пороговое значение ширины. Если ширина подлежащего досмотру транспортного средства 10 превышает заданное пороговое значение ширины, осуществляется переход к выполнению этапа S330; в противном случае осуществление способа завершается.
В некоторых вариантах осуществления на этапе S320 в дополнение к определению, превышает ли первая длина заданное пороговое значение первой длины или равна ему и превышает ли вторая длина пороговое значение второй длины или равна ему, также определяется, превышает ли ширина подлежащего досмотру транспортного средства 10 заданное пороговое значение ширины. Если первая длина превышает пороговое значение первой длины или равна ему, а вторая длина превышает пороговое значение второй длины или равна ему, при этом ширина подлежащего досмотру транспортного средства 10 превышает пороговое значение ширины, осуществляется переход к выполнению этапа S330; в противном случае осуществление способа завершается.
Вообще ширина подлежащего досмотру транспортного средства составляет от 1,5 метра до 3 метров. Таким образом, пороговое значение ширины может выбираться от 1 метра до 1,5 метров. Настоящее изобретение не ограничивается этими значениями.
Определив ширину подлежащего досмотру транспортного средства 10, можно эффективно распознавать, не зашел ли нежелательный подвижный объект в инспекционный канал, чтобы предотвратить излучение радиационного излучения инспекционного назначения в направлении такого нежелательного подвижного объекта.
На этапе S330 определяется, не появился ли участок G зазора подлежащего досмотру транспортного средства 10 в области излучения пучка устройства 220 радиационной визуализации в системе 20 для быстрого досмотра транспортного средства.
Как показано на Фиг. 2B, область S для излучения пучка устройства 220 радиационной визуализации образована пучком радиационного излучения, излучаемым источником радиационного излучения в устройстве 220 радиационной визуализации. Если смотреть в направлении движения подлежащего досмотру транспортного средства 10, область S для излучения пучка включает в себя начальную точку X1 и конечную точку X2. Чтобы подлежащее досмотру транспортное средство 10 подверглось воздействию пучка радиационного излучения для проведения сканирования, подлежащее досмотру транспортное средство 10 заходит в область S для излучения пучка в начальной точке X1, а выходит из области S для излучения пучка в конечной точке X2.
На этапе S340, когда участок G зазора появляется в области излучения пучка, пучок радиационного излучения первой дозы радиации излучается в направлении подлежащего досмотру транспортного средства 10.
Возвращаясь к Фиг. 2B, первый участок P1 подлежащего досмотру транспортного средства 10 прошел конечную точку X2 области S для излучения пучка, при этом передний край участка G зазора появляется в конечной точке X2 области S для излучения пучка устройства 220 радиационной визуализации. На этом этапе управляющее устройство (на фигуре не показано) в системе 20 для быстрого досмотра транспортного средства выполнено с возможностью управления устройством 220 радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации в направлении подлежащего досмотру транспортного средства 10.
В некоторых вариантах осуществления способ также включает в себя излучение пучка радиационного излучения второй дозы радиации в направлении первого участка P1 подлежащего досмотру транспортного средства 10. Вторая доза радиации представляет собой дозу радиации, безопасную для человеческого организма. Следует отметить, что конкретная величина второй дозы радиации не ограничена в настоящем изобретении и на практике может определяться в зависимости от критериев, принятых в различных странах и округах. Первая доза радиации превышает вторую дозу радиации.
В некоторых вариантах осуществления на этапе, когда передний край участка G зазора появляется в конечной точке X2 области S для излучения пучка устройства 220 радиационной визуализации, управляющее устройство выполнено с возможностью управления устройством 220 радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации в направлении подлежащего досмотру транспортного средства 10.
В некоторых вариантах осуществления в целях повышения безопасности водителя управляющее устройство может быть также выполнено с возможностью управления устройством 220 радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации в направлении подлежащего досмотру транспортного средства 10 в заданный момент времени, после того как передний край участка G зазора появляется в конечной точке X2 области S для излучения пучка устройства 220 радиационной визуализации.
Заданный момент времени может определяться в соответствии с заданным расстоянием и скоростью движения подлежащего досмотру транспортного средства 10 относительно системы 20 для быстрого досмотра транспортного средства. Заданное расстояние может устанавливаться, например, в зависимости от конкретной схемы внедрения. Скорость движения подлежащего досмотру транспортного средства 10 относительно системы 20 для быстрого досмотра транспортного средства может измеряться, например, с помощью радара для измерения скорости или может измеряться тем же лазерным сканером 210.
Для определения момента времени, в который передний край участка G зазора появляется в конечной точке X2 области S для излучения пучка, может определяться, достиг ли передний край участка G зазора конечной точки X2, согласно изменению «глубины», измеряемой от первого участка P1 (т.е. головной части) и участка G зазора. Например, если первый участок P1 не прошел конечную точку X2, излучение в конечной точке X2 будет излучаться на первый участок P1, при этом значение полученного и выданного расстояния будет относительно малым. Если первый участок P1 прошел конечную точку X2, излучение в конечной точке X2 будет излучаться на участок G зазора, при этом значение полученного и выданного расстояния будет относительно большим. На основании этого может определяться, достиг ли передний край участка G зазора конечной точки X2. Например, это может определяться на основании разности между данными двумя выданными значениями расстояния. Иными словами, если значения расстояния изменятся от относительно малой величины до относительно большой величины, при этом абсолютное значение разности превышает заданное первое пороговое значение, можно определить, что передний край участка зазора прошел конечную точку X2. Первое пороговое значение может задаваться в зависимости от требований практического применения, при этом настоящее изобретение этим не ограничивается.
В некоторых вариантах осуществления управляющее устройство может быть выполнено с возможностью управления устройством 220 радиационной визуализации для излучения пучка радиационного излучения в направлении подлежащего досмотру транспортного средства 10 в момент времени, когда задний край участка G зазора проходит конечную точку X2 области S для излучения пучка устройства 220 радиационной визуализации.
Для определения момента времени, в который задний край участка G зазора проходит конечную точку X2 области S для излучения пучка устройства 220 радиационной визуализации, может определяться, прошел ли задний край участка зазора конечную точку X2, согласно изменению «глубины», измеряемой от участка G зазора и второго участка P2 (т.е. участка с грузовым отсеком). Например, когда участок G зазора не прошел конечную точку X2, излучение в конечной точке X2 будет излучаться на участок G зазора, при этом значение полученного и выданного расстояния будет относительно большим. Когда участок G зазора прошел конечную точку X2, излучение в конечной точке X2 будет излучаться на второй участок P2, при этом значение полученного и выданного расстояния будет относительно малым. На основании этого можно определить, прошел ли задний край участка G зазора конечную точку X2. Например, это может определяться на основании разности между данными двумя выданными значениями расстояния. Иными словами, если значения расстояния изменяются от относительно большой величины до относительно малой величины, при этом абсолютное значение разности превышает заданное второе пороговое значение, можно определить, что задняя часть участка зазора прошла конечную точку X2. Второе пороговое значение может задаваться в зависимости от требований практического применения, при этом настоящее изобретение этим не ограничивается.
Таким образом, в способе быстрого досмотра транспортного средства, предложенном в настоящем изобретении, измеряется длина участков подлежащего досмотру транспортного средства; когда длины удовлетворяют заданным условиям, может быть распознан участок зазора подлежащего досмотру транспортного средства. Таким образом, временная привязка для излучения пучка радиационного излучения может определяться точно, что позволяет избежать риска для безопасности водителя вследствие ошибок в определении головной части подлежащего досмотру транспортного средства.
Кроме того, в способе быстрого досмотра транспортного средства, предложенном в настоящем изобретении, ширина подлежащего досмотру транспортного средства также может измеряться. Таким образом, он может распознавать объект, который требуется проинспектировать в инспекционном канале. Объект, отличный от транспортного средства, может быть эффективно распознан и исключен в соответствии с шириной. Таким образом, вероятность ошибок определения может быть снижена, при этом уровень безопасности может быть повышен.
На Фиг. 5 показана блок-схема, иллюстрирующая систему для быстрого досмотра транспортного средства согласно одному примеру осуществления. Как показано на Фиг. 5, система 20 для быстрого досмотра транспортного средства включает в себя устройство 240 измерения длины, устройство 220 радиационной визуализации, и управляющее устройство 230.
Устройство 220 радиационной визуализации включает в себя источник 2210 радиационного излучения, детектор 2220 и устройство 2230 обработки изображения. Источник 2210 радиационного излучения выполнен с возможностью излучения пучка радиационного излучения в направлении подлежащего досмотру транспортного средства, проходящего по инспекционному каналу. Пучок радиационного излучения может представлять собой любой вид излучения, способный визуализировать объект посредством радиационного излучения, например рентгеновское излучение, γ-излучение, поток нейтронов и т.п., при этом настоящее изобретение этим не ограничивается. Источник 2210 радиационного излучения может включать в себя, например, рентгеновский аппарат, ускоритель, генератор нейтронов и т.п. Источник 2210 радиационного излучения может излучать пучок радиационного излучения под контролем управляющего устройства 230, например, получив сигнал управления управляющего устройства 230. Источник 2210 радиационного излучения может излучать пучок радиационного излучения или прекращать его излучение, открывая или закрывая механический затвор. Детектор 2220 выполнен с возможностью обнаружения радиационного излучения, прошедшего через подлежащее досмотру транспортное средство, и/или рассеянного радиационного излучения. Устройство 2230 обработки изображения выполнено с возможность формирования изображения согласно сигналам радиационного излучения, распознанным детектором 2220, для инспектирования внутренней части подлежащего досмотру транспортного средства.
Устройство 240 измерения длины выполнено с возможностью измерения первой длины и второй длины подлежащего досмотру транспортного средства, когда подлежащее досмотру транспортное средство попадает в зону досмотра. Зона досмотра описана выше и повторно описываться не будет. Устройство 240 измерения длины может включать в себя, например, лазерный сканер или камеру 3D визуализации и т.п. Если устройство 240 измерения длины представляет собой лазерный сканер 210, как показано на Фиг. 2A и 2B, устройство 210 измерения длины может располагаться на боковой стороне инспекционного канала либо может также располагаться сверху инспекционного канала, как показано на Фиг. 4. В возможном варианте осуществления расстояние между лазерным сканером 210 и центральной точкой M области излучения пучка, образованной пучком радиационного излучения, излучаемым устройством 220 радиационной визуализации, меньше или равно 1 метру. Измерение длин с помощью лазерного сканера 210 описано выше и повторно описываться не будет.
Лазерный сканер в качестве устройства для измерения длины легко монтируется и имеет низкую стоимость. На практике нет необходимости строго отслеживать угол наклона датчика согласно требованиям правил монтажа. Установочный угол наклона не повлияет на требуемую точность и алгоритм. Кроме того, лазерный сканер обладает широким диапазоном измерения и может непрерывно контролировать диапазон длиной 80 метров или даже более.
Камера 3D визуализации также может использоваться для измерения длины. В этом случае трехмерное изображение сначала может быть захвачено камерой 3D визуализации, а затем длины могут быть измерены согласно захваченному трехмерному изображению.
Кроме того, система 20 для быстрого досмотра транспортного средства может также включать в себя фотоэлектрический переключатель, световую завесу, лазерный датчик, радиолокационный датчик и т.п. для определения, зашло ли подлежащее досмотру транспортное средство в зону досмотра. В некоторых вариантах осуществления, как показано на Фиг. 1, упомянутая первая длина представляет собой длину L1 первого участка P1 подлежащего досмотру транспортного средства 10, а упомянутая вторая длина представляет собой общую длину L2 подлежащего досмотру транспортного средства 10, т.е. суммарную длину первого участка P1, второго участка P2, и участка G зазора подлежащего досмотру транспортного средства 10.
В некоторых вариантах осуществления упомянутая первая длина представляет собой длину первого участка P1 подлежащего досмотру транспортного средства 10, а упомянутая вторая длина может также представлять собой длину второго участка P2 подлежащего досмотру транспортного средства 10.
Управляющее устройство 230 выполнено с возможностью определения, превышает ли первая длина заданное пороговое значение первой длины или равна ему, и превышает ли вторая длина пороговое значение второй длины или равна ему, при этом, если первая длина превышает пороговое значение первой длины или равна ему, а вторая длина превышает пороговое значение второй длины или равна ему, может определяться, появляется ли участок G зазора подлежащего досмотру транспортного средства в области излучения пучка устройства 220 радиационной визуализации. Когда участок G зазора появляется в области излучения пучка, пучок радиационного излучения может излучаться в направлении подлежащего досмотру транспортного средства по признаку появления участка G зазора. Пороговое значение первой длины и пороговое значение второй длины описаны выше и повторно описываться не будет.
Управляющее устройство 230 может быстро распознавать транспортное средство, имеющее участок G зазора, путем определения того, превышают ли первая длина и вторая длина заданные пороговые значения.
В некоторых вариантах осуществления система 20 для быстрого досмотра транспортного средства может также включать в себя лазерный сканер, выполненный с возможностью измерения ширины подлежащего досмотру транспортного средства 10, когда подлежащее досмотру транспортное средство 10 заходит в заданную зону досмотра. Если устройство 240 измерения длины также представляет собой лазерный сканер, лазерный сканер для измерения ширины подлежащего досмотру транспортного средства 10 может являться тем же лазерным сканером, что и упомянутый лазерный сканер для измерения длины, либо может представлять собой другой лазерный сканер. Например, как показано на Фиг. 4 на примере лазерного сканера 210, выполненного с возможностью измерения одновременно ширины и длины, когда лазерный сканер для измерения ширины и лазерный сканер для измерения длины представляют собой один и тот же лазерный сканер 210, лазерный сканер 210 может располагаться сбоку (или на боковой стенке) инспекционного канала, чтобы измерять как длину, так и ширину подлежащего досмотру транспортного средства 10. Измерение ширины подлежащего досмотру транспортного средства 10 с помощью лазерного сканера 210, когда подлежащее досмотру транспортное средство 10 попадает на заданный инспекционный канал, описано выше и повторно описываться не будет.
В некоторых вариантах осуществления, прежде чем определяется, превышает ли первая длина заданное пороговое значение первой длины или равна ему, и превышает ли вторая длина заданное пороговое значение второй длины или равна ему, управляющее устройство 230 выполнено с возможностью определять, превышает ли ширина подлежащего досмотру транспортного средства 10 заданное пороговое значение ширины. Если ширина подлежащего досмотру транспортного средства 10 превышает пороговое значение ширины, устройство 240 измерения длины получает команду измерить упомянутые первую длину и вторую длину, после чего определяется, превышает ли первая длина заданное пороговое значение первой длины или равна ему, и превышает ли вторая длина заданное пороговое значение второй длины или равна ему. Пороговое значение ширины описано выше и повторно описываться не будет.
В некоторых вариантах осуществления в дополнение к определению, превышает ли первая длина заданное пороговое значение первой длины или равна ему и превышает ли вторая длина пороговое значение второй длины или равна ему, управляющее устройство 230 выполнено с возможностью также определять, превышает ли ширина подлежащего досмотру транспортного средства 10 заданное пороговое значение ширины. Если первая длина превышает пороговое значение первой длины или равна ему, а вторая длина превышает пороговое значение второй длины или равна ему, при этом ширина подлежащего досмотру транспортного средства 10 превышает пороговое значение ширины, определяется, появляется ли участок G зазора подлежащего досмотру транспортного средства в области излучения пучка устройства 220 радиационной визуализации. Пороговое значение ширины описано выше и повторно описываться не будет.
В нижеприведенном примере устройство 240 измерения длины по-прежнему представляет собой лазерный сканер 210, как показано на Фиг. 4. Возвращаясь к Фиг. 2B, область S для излучения пучка образована пучком излучаемого радиационного излучения. Если смотреть в направлении движения подлежащего досмотру транспортного средства 10, область S для излучения пучка включает в себя начальную точку X1 и конечную точку X2. Чтобы подлежащее досмотру транспортное средство 10 подверглось воздействию пучка радиационного излучения для проведения сканирования, подлежащее досмотру транспортное средство 10 заходит в область S для излучения пучка в начальной точке X1, а выходит из области S для излучения пучка в конечной точке X2.
Как показано на Фиг. 2B, когда первый участок P1 подлежащего досмотру транспортного средства 10 прошел конечную точку X2 области S для излучения пучка, при этом передний край участка G зазора появляется в конечной точке X2 области S для излучения пучка, управляющее устройство 230 может быть выполнено с возможностью управления устройством 220 радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации в направлении подлежащего досмотру транспортного средства 10.
В некоторых вариантах осуществления перед определением участка G зазора управляющее устройство 230 также выполнено с возможностью управления устройством 20 радиационной визуализации для излучения пучка радиационного излучения второй дозы радиации в направлении первого участка P1 подлежащего досмотру транспортного средства 10. Вторая доза радиации представляет собой дозу радиации, безопасную для человеческого организма. Следует отметить, что конкретная величина второй дозы радиации не ограничена в настоящем изобретении и на практике может определяться в зависимости от критериев, принятых в различных странах и округах. Первая доза радиации превышает вторую дозу радиации.
В некоторых вариантах осуществления на этапе, когда передний край участка G зазора появляется в конечной точке X2 области S для излучения пучка устройства 220 радиационной визуализации, управляющее устройство 230 выполнено с возможностью управления устройством 220 радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации в направлении подлежащего досмотру транспортного средства 10.
В некоторых вариантах осуществления в целях повышения безопасности водителя управляющее устройство 230 может быть также выполнено с возможностью управления устройством 220 радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации в направлении подлежащего досмотру транспортного средства 10 в заданный момент времени, после того как передний край участка G зазора появляется в конечной точке X2 области S для излучения пучка устройства 220 радиационной визуализации.
Заданный момент времени может определяться в соответствии с заданным расстоянием и скоростью движения подлежащего досмотру транспортного средства 10 относительно системы 20 для быстрого досмотра транспортного средства. Заданное расстояние может устанавливаться, например, в зависимости от конкретной схемы внедрения. Скорость движения подлежащего досмотру транспортного средства 10 относительно системы 20 для быстрого досмотра транспортного средства может измеряться, например, с помощью радара для измерения скорости или может измеряться тем же лазерным сканером 210.
Для определения момента времени, в который передний край участка G зазора появляется в конечной точке X2 области S для излучения пучка, может определяться, достиг ли передний край участка G зазора конечной точки X2, согласно изменению «глубины», измеряемой от первого участка P1 (т.е. головной части) и участка G зазора. Например, если первый участок P1 не прошел конечную точку X2, излучение в конечной точке X2 будет излучаться на первый участок P1, при этом значение полученного и выданного расстояния будет относительно малым. Если первый участок P1 прошел конечную точку X2, излучение в конечной точке X2 будет излучаться на участок G зазора, при этом значение полученного и выданного расстояния будет относительно большим. На основании этого может определяться, достиг ли передний край участка G зазора конечной точки X2. Например, это может определяться на основании разности между данными двумя выданными значениями расстояния. Иными словами, если значения расстояния изменятся от относительно малой величины до относительно большой величины, при этом абсолютное значение разности превышает заданное первое пороговое значение, можно определить, что передний край участка зазора прошел конечную точку X2. Первое пороговое значение может задаваться в зависимости от требований практического применения, при этом настоящее изобретение этим не ограничивается.
В некоторых вариантах осуществления управляющее устройство 230 может быть выполнено с возможностью управления устройством 220 радиационной визуализации для излучения пучка радиационного излучения в направлении подлежащего досмотру транспортного средства 10 в момент времени, когда задний край участка G зазора проходит конечную точку X2 области S для излучения пучка устройства 220 радиационной визуализации.
Для определения момента времени, в который задний край участка G зазора проходит конечную точку X2 области S для излучения пучка устройства 220 радиационной визуализации, может определяться, прошел ли задний край участка зазора конечную точку X2, согласно изменению «глубины», измеряемой от участка G зазора и второго участка P2 (т.е. участка с грузовым отсеком). Например, когда участок G зазора не прошел конечную точку X2, излучение в конечной точке X2 будет излучаться на участок G зазора, при этом значение полученного и выданного расстояния будет относительно большим. Когда участок G зазора прошел конечную точку X2, излучение в конечной точке X2 будет излучаться на второй участок P2, при этом значение полученного и выданного расстояния будет относительно малым. На основании этого можно определить, прошел ли задний край участка G зазора конечную точку X2. Например, это может определяться на основании разности между данными двумя выданными значениями расстояния. Иными словами, если значения расстояния изменяются от относительно большой величины до относительно малой величины, при этом абсолютное значение разности превышает заданное второе пороговое значение, можно определить, что задняя часть участка зазора прошла конечную точку X2. Второе пороговое значение может задаваться в зависимости от требований практического применения, при этом настоящее изобретение этим не ограничивается.
Таким образом, в системе быстрого досмотра транспортного средства, предложенной в настоящем изобретении, измеряется длина участков подлежащего досмотру транспортного средства; когда длины удовлетворяют заданным условиям, может быть распознан участок зазора подлежащего досмотру транспортного средства. Таким образом, временная привязка для излучения пучка радиационного излучения может определяться точно, что позволяет избежать риска для безопасности водителя вследствие ошибок в определении головной части подлежащего досмотру транспортного средства.
Кроме того, в системе быстрого досмотра транспортного средства, предложенной в настоящем изобретении, также может измеряться ширина подлежащего досмотру транспортного средства. Таким образом, она может распознавать объект, который требуется обследовать в инспекционном канале. Объект, отличный от транспортного средства, может быть эффективно распознан и исключен в соответствии с шириной. Таким образом, вероятность ошибок определения может быть снижена, при этом уровень безопасности может быть повышен.
Выше были конкретно проиллюстрированы и описаны примеры осуществления настоящего изобретения. Следует понимать, что настоящее изобретение не ограничено раскрытыми вариантами осуществления. Наоборот, настоящее изобретение охватывает все изменения и эквивалентные замены в объеме притязаний прилагаемой формулы изобретения.

Изобретение относится в общем к технологии быстрого досмотра транспортного средства на основе радиационного сканирования. Способ и система быстрого досмотра транспортного средства на основе устройства измерения длины, включающие в себя: когда подлежащее досмотру транспортное средство попадает в зону досмотра, измерение первой длины и второй длины подлежащего досмотру транспортного средства; определение, превышает ли первая длина и вторая длина соответственно заданное пороговое значение второй длины или равна ему; и если да, то определение, появляется ли участок зазора подлежащего досмотру транспортного средства между первым участком и вторым участком подлежащего досмотру транспортного средства в области излучения пучка, образованной пучком радиационного излучения, излучаемого системой для быстрого досмотра транспортного средства; и если участок зазора появляется в области излучения пучка, излучение пучка радиационного излучения первой дозы радиации на подлежащее досмотру транспортное средство согласно участку зазора, при этом подлежащее досмотру транспортное средство перемещается относительно системы быстрого досмотра транспортного средства. Технический результат – повышение точности временной привязки для излучения пучка радиационного излучения. 2 н. и 18 з.п. ф-лы, 7 ил.
1. Способ быстрого досмотра транспортного средства, применяемый в системе быстрого досмотра транспортного средства, при этом способ содержит:
этап (a), на котором, когда подлежащее досмотру транспортное средство попадает в зону досмотра, измеряют первую длину и вторую длину подлежащего досмотру транспортного средства;
этап (b), на котором определяют, превышает ли первая длина заданное пороговое значение первой длины или равна ему, и превышает ли вторая длина заданное пороговое значение второй длины или равна ему;
этап (c), на котором, если первая длина превышает пороговое значение первой длины или равна ему, а вторая длина превышает пороговое значение второй длины или равна ему, определяют, появляется ли участок зазора подлежащего досмотру транспортного средства между первым участком и вторым участком подлежащего досмотру транспортного средства в области излучения пучка, образованной пучком радиационного излучения, излучаемого системой для быстрого досмотра транспортного средства; и
этап (d), на котором, когда участок зазора появляется в области излучения пучка, излучают пучок радиационного излучения первой дозы радиации на подлежащее досмотру транспортное средство согласно участку зазора,
при этом подлежащее досмотру транспортное средство перемещается относительно системы быстрого досмотра транспортного средства.
2. Способ быстрого досмотра транспортного средства по п.1, в котором перед этапом (a) способ дополнительно содержит этапы, на которых:
когда подлежащее досмотру транспортное средство попадает в зону досмотра, измеряют ширину подлежащего досмотру транспортного средства;
определяют, превышает ли ширина подлежащего досмотру транспортного средства заданное пороговое значение ширины; и
если ширина подлежащего досмотру транспортного средства превышает пороговое значение ширины, выполняют этапы (a) - (d).
3. Способ быстрого досмотра транспортного средства по п.1, в котором
этап (a) дополнительно содержит этап, на котором, когда подлежащее досмотру транспортное средство попадает в зону досмотра, измеряют ширину подлежащего досмотру транспортного средства;
этап (b) дополнительно содержит этап, на котором определяют, превышает ли ширина подлежащего досмотру транспортного средства заданное пороговое значение ширины; и
этап (c) дополнительно содержит этап, на котором, если первая длина превышает пороговое значение первой длины или равна ему, вторая длина превышает пороговое значение второй длины или равна ему, и ширина подлежащего досмотру транспортного средства превышает пороговое значение ширины, определяют, появляется ли участок зазора подлежащего досмотру транспортного средства между первым участком и вторым участком подлежащего досмотру транспортного средства в области излучения пучка.
4. Способ быстрого досмотра транспортного средства по п.1, в котором первая длина представляет собой длину первого участка подлежащего досмотру транспортного средства, а вторая длина представляет собой сумму длин первого участка, второго участка и участка зазора подлежащего досмотру транспортного средства; либо первая длина представляет собой длину первого участка подлежащего досмотру транспортного средства, а вторая длина представляет собой длину второго участка подлежащего досмотру транспортного средства.
5. Способ быстрого досмотра транспортного средства по п.1, в котором излучение пучка радиационного излучения первой дозы радиации на подлежащее досмотру транспортное средство согласно участку зазора содержит этапы, на которых определяют момент появления, когда участок зазора появляется в конечной точке области излучения пучка, и излучают пучок радиационного излучения первой дозы радиации на второй участок подлежащего досмотру транспортного средства в определённый момент появления.
6. Способ быстрого досмотра транспортного средства по п.1, в котором излучение пучка радиационного излучения первой дозы радиации на подлежащее досмотру транспортное средство согласно участку зазора содержит этапы, на которых определяют момент появления, когда участок зазора появляется в конечной точке области излучения пучка, и излучают пучок радиационного излучения первой дозы радиации на второй участок подлежащего досмотру транспортного средства в заданный момент времени после определённого момента появления.
7. Способ быстрого досмотра транспортного средства по п.6, в котором заданный момент времени определяется в соответствии с заданным расстоянием и скоростью движения подлежащего досмотру транспортного средства относительно системы быстрого досмотра транспортного средства.
8. Способ быстрого досмотра транспортного средства по п.5, в котором определение момента появления, когда участок зазора появляется в конечной точке области излучения пучка, содержит этапы, на которых непрерывно обнаруживают данные, возвращаемые радиационным излучением в конечной точке области излучения пучка, определяют момент времени, когда возвращаемые данные изменяются от относительно малой величины до относительно большой величины, и абсолютное значение разности между относительно малой величиной и относительно большой величиной превышает заданное первое пороговое значение, в качестве момента появления.
9. Способ быстрого досмотра транспортного средства по п.1, в котором излучение пучка радиационного излучения первой дозы радиации на подлежащее досмотру транспортное средство согласно участку зазора содержит этапы, на которых определяют момент покидания, когда участок зазора покидает конечную точку области излучения пучка, и излучают пучок радиационного излучения первой дозы радиации на подлежащее досмотру транспортное средство в определённый момент покидания.
10. Способ быстрого досмотра транспортного средства по п.9, в котором определение момента покидания, когда участок зазора покидает конечную точку области излучения пучка, содержит этапы, на которых непрерывно обнаруживают данные, возвращаемые радиационным излучением в конечной точке области излучения пучка, определяют момент времени, когда возвращаемые данные изменяются от относительно большой величины до относительно малой величины, и абсолютное значение разности между относительно большой величиной и относительно малой величиной превышает заданное второе пороговое значение, в качестве момента покидания.
11. Система быстрого досмотра транспортного средства, содержащая:
устройство радиационной визуализации, содержащее источник радиационного излучения, выполненный с возможностью излучения пучка радиационного излучения для досмотра подлежащего досмотру транспортного средства; детектор, выполненный с возможностью обнаружения радиационного излучения, прошедшего через подлежащее досмотру транспортное средство, и/или рассеянного радиационного излучения; и устройство обработки изображения, выполненное с возможностью формирования изображения согласно сигналам радиационного излучения, обнаруженным детектором;
устройство измерения длины, выполненное с возможностью измерения первой длины и второй длины подлежащего досмотру транспортного средства, когда подлежащее досмотру транспортное средство попадает в зону досмотра; и
управляющее устройство, выполненное с возможностью определения, превышает ли первая длина заданное пороговое значение первой длины или равна ему, и превышает ли вторая длина заданное пороговое значение второй длины или равна ему; если первая длина превышает пороговое значение первой длины или равна ему, а вторая длина превышает пороговое значение второй длины или равна ему, определения, появляется ли участок зазора подлежащего досмотру транспортного средства между первым участком и вторым участком подлежащего досмотру транспортного средства в области излучения пучка, образованной пучком радиационного излучения; и, когда участок зазора появляется в конечной точке области излучения пучка, управления устройством радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации на подлежащее досмотру транспортное средство согласно участку зазора,
при этом подлежащее досмотру транспортное средство перемещается относительно устройства измерения длины.
12. Система быстрого досмотра транспортного средства по п.11, при этом система дополнительно содержит лазерный сканер, выполненный с возможностью измерения ширины подлежащего досмотру транспортного средства, когда подлежащее досмотру транспортное средство попадает в зону досмотра; и
управляющее устройство дополнительно выполнено с возможностью, до определения того, превышает ли первая длина заданное пороговое значение первой длины или равна ему, и превышает ли вторая длина заданное пороговое значение второй длины или равна ему, определения, превышает ли ширина подлежащего досмотру транспортного средства заданное пороговое значение ширины; и, если ширина подлежащего досмотру транспортного средства превышает пороговое значение ширины, выдачи команды устройству измерения длины для измерения первой длины и второй длины, и определения, превышает ли первая длина заданное пороговое значение первой длины или равна ему, и превышает ли вторая длина заданное пороговое значение второй длины или равна ему.
13. Система быстрого досмотра транспортного средства по п.11, при этом система дополнительно содержит лазерный сканер, выполненный с возможностью измерения ширины подлежащего досмотру транспортного средства, когда подлежащее досмотру транспортное средство попадает в зону досмотра; и
управляющее устройство дополнительно выполнено с возможностью определения, превышает ли ширина подлежащего досмотру транспортного средства заданное пороговое значение ширины; и, если первая длина превышает пороговое значение первой длины или равна ему, вторая длина превышает пороговое значение второй длины или равна ему, а ширина подлежащего досмотру транспортного средства превышает пороговое значение ширины, определения, появляется ли участок зазора подлежащего досмотру транспортного средства между первым участком и вторым участком подлежащего досмотру транспортного средства в области излучения пучка.
14. Система быстрого досмотра транспортного средства по п.11, в которой первая длина представляет собой длину первого участка подлежащего досмотру транспортного средства, а вторая длина представляет собой сумму длин первого участка, второго участка и участка зазора подлежащего досмотру транспортного средства; либо первая длина представляет собой длину первого участка подлежащего досмотру транспортного средства, а вторая длина представляет собой длину второго участка подлежащего досмотру транспортного средства.
15. Система быстрого досмотра транспортного средства по п.12, в которой устройство измерения длины содержит лазерный сканер, и управление устройством радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации на подлежащее досмотру транспортное средство согласно участку зазора содержит определение момента появления, когда участок зазора появляется в конечной точке области излучения пучка, и управление устройством радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации на второй участок подлежащего досмотру транспортного средства в определённый момент появления.
16. Система быстрого досмотра транспортного средства по п.12, в которой устройство измерения длины содержит лазерный сканер, и управление устройством радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации на подлежащее досмотру транспортное средство согласно участку зазора содержит определение момента появления, когда участок зазора появляется в конечной точке области излучения пучка, и управление устройством радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации на второй участок подлежащего досмотру транспортного средства в заданный момент времени после определённого момента появления.
17. Система быстрого досмотра транспортного средства по п.16, в которой заданный момент времени определяется в соответствии с заданным расстоянием и скоростью движения подлежащего досмотру транспортного средства относительно системы быстрого досмотра транспортного средства.
18. Система быстрого досмотра транспортного средства по п.15, в которой определение момента появления, когда участок зазора появляется в конечной точке области излучения пучка, содержит прием данных, возвращаемых при непрерывном обнаружении радиационного излучения в конечной точке области излучения пучка посредством лазерного сканера, определение момента времени, когда возвращаемые данные изменяются от относительно малой величины до относительно большой величины, и абсолютное значение разности между относительно малой величиной и относительно большой величиной превышает заданное первое пороговое значение, в качестве момента появления.
19. Система быстрого досмотра транспортного средства по п.12, в которой устройство измерения длины содержит лазерный сканер, и управление устройством радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации на подлежащее досмотру транспортное средство согласно участку зазора содержит определение момента покидания, когда участок зазора покидает конечную точку области излучения пучка, и управление устройством радиационной визуализации для излучения пучка радиационного излучения первой дозы радиации на второй участок подлежащего досмотру транспортного средства в определённый момент покидания.
20. Система быстрого досмотра транспортного средства по п.19, в которой определение момента покидания, когда участок зазора покидает конечную точку области излучения пучка, содержит прием данных, возвращаемых при непрерывном обнаружении радиационного излучения в области излучения пучка, определение момента времени, когда выданные данные изменяются от относительно большой величины до относительно малой величины, и абсолютное значение разности между относительно большой величиной и относительно малой величиной превышает заданное второе пороговое значение, в качестве момента покидания.
| US 9036779 B2, 19.05.2015 | |||
| СИСТЕМА ДОСМОТРА ГРУЗОВ И ТРАНСПОРТНЫХ СРЕДСТВ, ПЕРЕМЕЩАЮЩИХСЯ СВОИМ ХОДОМ, СПОСОБ АВТОМАТИЧЕСКОГО РАДИОСКОПИЧЕСКОГО КОНТРОЛЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ЗОНЫ РАДИАЦИОННОГО СКАНИРОВАНИЯ И СПОСОБ ФОРМИРОВАНИЯ ТЕНЕВОГО ИЗОБРАЖЕНИЯ ИНСПЕКТИРУЕМОГО ОБЪЕКТА | 2010 |
|
RU2430424C1 |
| US 6507025 B1, 14.01.2003 | |||
| УСТАНОВКА ДЛЯ ДОСМОТРА ГРУЗОВ | 2007 |
|
RU2386954C1 |

