Заявляемое изобретение включает способ и систему непроникающего досмотра транспортных средств, автоконтейнеровозов и железнодорожных вагонов. Досмотр может проводиться без проникновения человека непосредственно внутрь осматриваемого объекта, то есть - без затрат времени и физических усилий на визуальный контроль, распломбирование и т.п.
Результатом применения предлагаемого изобретения является сканированное радиографическое изображение содержимого досматриваемого объекта, по которому специально обученный оператор может оценить количество и вид транспортируемого груза. Анализ рентгеновских изображений позволяет обнаружить попытки нелегального провоза контрабандных, запрещенных или недекларированных грузов (таких как наркотические и взрывчатые вещества, оружие) и противостоять угрозам терроризма на пунктах пропуска транспортных средств в стратегически важных точках, требующих высокого уровня безопасности, таких как аэропорты, морские и речные порты, пункты пересечения границы, зоны конфликтов или военные базы.
На существующем уровне техники известно несколько способов сканирования с использованием таких источников излучения, как:
- источники естественного гамма-излучения, испускаемого инкапсулированным радиоактивным материалом типа кобальта, цезия и т.п.;
- линейный ускоритель рентгеновского, гамма-излучения или нейтронов.
Принцип действия данной системы непроникающего контроля основан на облучении линейной последовательности чувствительных датчиков, размещенных напротив луча проникающего излучения с образованием лучевого тоннеля, перемещающегося относительно сканируемого объекта. Электрические сигналы, воспринимаемые детекторами, проходят аналогово-цифровую обработку с построчным формированием рентгенографии, отображаемой на дисплее ПК. Система приема и переработки сигналов от множества, как правило - сотен, датчиков, подразумевает наличие комплекса блоков и сети проводки с многочисленными параллельными соединениями между несущей конструкцией и подсистемами, генерирующими радиографическое изображение.
Перемещение сканируемого объекта относительно сканирующей системы выполняется или за счет движения мобильного объекта через неподвижный сканер или за счет движения мобильного сканера вокруг неподвижного объекта.
Управление всем технологическим процессом таких систем осуществляется из кабины оператора, встроенной в систему сканирования с обязательным внешним противорадиационным экранированием. Недостатком этого способа является профессиональное облучение оператора.
В настоящее время международный рынок предлагает несколько систем сканирования, работающих по описанным выше технологиям в различных вариантах. Среди них - система сканирования гамма-излучением GaRDS производства американской компании RAPISCAN SECURITY PRODUCTS и мобильная рентгеновская система сканирования HCVM L от SMITHS DETECTION. В обоих случаях, как и в большинстве других известных случаев мобильных систем сканирования, кабина оператора устанавливается на шасси сканирующего устройства, что подвергает обслуживающий персонал профессиональным и случайным рискам облучения, которые устраняются при использовании настоящего изобретения, согласно которому операторская кабина устанавливается на трейлере, размещаемом вне зоны облучения для дистанционного радиоуправления всеми процессами при выполнении сканирования.
Другим признаком, отличающим настоящее изобретение от известных систем, включая GaRDS и HCVM L, требующих от водителя управления устройством сканирования, является отсутствие такой необходимости благодаря системе автоматизированного управления в нужном направлении и с безопасного расстояния от сканируемого объекта.
Другими недостатками упомянутых известных установок являются их масса и установка на шасси, рассчитанные на большие нагрузки. Система HCVM L фирмы SMITHS DETECTION имеет трехосное шасси грузоподъемностью 25 тонн, а система MT1213LC китайской компании NUCTECH базируется на четырехосном шасси, грузоподъемностью более 25 тонн.
Названные выше системы очень сложны в управлении, одной смене для их обслуживания требуется персонал из 3 человек: оператор по обработке данных, водитель и наружный контролер (для HCVM L - минимально из 2 человек, притом что водитель может совмещать обязанности оператора данных); наружный контролер охраняет и контролирует въезд и выезд из зоны облучения, закрытой для общего доступа из-за радиационной опасности.
Известные сканирующие системы, такие как GaRDS и HCVM L, имеют большую нагрузку на ось, как в функциональном, так и в транспортном режиме, притом что максимально допустимые габариты для транспортных средств на общественных дорогах составляют 18 м × 2,5 м × 4 м. Принимая во внимание эти условия, системы, подобные названным выше, не могут перевозиться водным, железнодорожным, воздушным или автомобильным транспортом, поскольку они не отвечают требованиям ISO по размещению в стандартном грузовом контейнере. Как правило, мобильные сканеры предусматривают перевозку автотранспортом на сравнительно короткие расстояния, только по общественным дорогам или только по дорогам, рассчитанным на большую осевую нагрузку. Для транспортировки существующих систем они подлежат демонтажу и погрузке в стандартные контейнеры, что требует времени и подразумевает уровень технической подготовки, который пользователи системой обычно не имеют, фактически делая невозможной необходимую мобильность на территориях с высоким уровнем требований безопасности, таких как зоны конфликтов или компактно размещенные военные базы.
Преимуществом заявляемого изобретения является удобство транспортировки любым видом наземного, водного или воздушного транспорта в стандартном грузовом контейнере и простота установки и пуска в течение около 5 минут после прибытия на место эксплуатации (силами персонала средней квалификации) в отличие от известных систем типа GaRDS или HCVM L, повторный монтаж и ввод которых после транспортировки может потребовать усилий высококвалифицированного персонала в течение нескольких дней.
Другим значительным недостатком известных систем непроникающего контроля является продолжительность одной процедуры сканирования, приводящая в конечном счете к низкой грузопропускной способности сканирующего оборудования в единицу времени. Это служит главным фактором задержки потока товаров, пересекающих границу через портовые или сухопутные пропускные пункты, и увеличения времени простоя, поскольку большинство известных мобильных сканирующих систем досмотра имеют максимальную пропускную способность до 30 транспортных средств в час. Возьмем для примера Сингапур и Гонконг, которые являются портами №2 и №3 в мире по интенсивности контейнерного потока и ежегодно пропускают, соответственно, 27 миллионов и 24 миллиона контейнеров сквозь общее количество, соответственно, 12 и 8 сканирующих установок (источник: исследование „Безопасность глобальной логистической цепи", проведенное в 2007 году). Даже если эти сканирующие установки будут работать с полной нагрузкой (24 часа в день 365 дней в году), они смогут просканировать лишь 10% от общего числа контейнеров, а в большинстве портов мира сканирующее оборудование имеет гораздо более низкую производительность.
По данным Всемирного совета судоходства (World Shipping Council, WSC) в мае 2011 года общий объем оборота контейнеров составил приблизительно 18 605 миллионов единиц, что эквивалентно 28 535 TEU (публикации Один TEU эквивалентен полезному объему стандартного грузового контейнера длиной 20 футов (=6,1 м) и шириной 8 футов (=2,44 м)), следовательно, учитывая общее количество систем непроникающего контроля (согласно исследованию, проведенному Гаврским университетом по заказу Всемирной таможенной организации, на конец 2007 года - 1250 единиц во всем мире), по европейской статистике пропускная способность сканирования составляет 3% контейнеров в небольших портах и 0,1% в крупных гаванях (по публикации Рабочего документа персонала Еврокомиссии „Безопасное и 100%-ое сканирование контейнеров", февраль 2010). Таким образом, большая часть контейнеров и транспортных средств не проходит сканирование из-за недостатка фактического времени, вместо этого небольшое количество контейнеров подвергается досмотру в произвольном порядке.
Предлагаемое изобретение, характеризующееся высокой мобильностью, возможностью погрузки в стандартный ISO-контейнер и быстрой глобальной транспортировки, а также эффективной пропускной способностью, превышающей 200 транспортных средств в час, может стать средством решения задачи повышения уровня безопасности портов, через которые проходит экспорт грузов в США, поставленной специальным законодательством страны в 2007 году (о "второй линии обороны" - Second Line of Defense, SLD), обязывающим обеспечить 100%-ное сканирование контейнеров, поступающих в страну морским транспортом, к 1 января 2012. Между тем, несмотря на осложнение экономического климата, препятствующее активной реализации этого законодательства, США ставят новые цели, в частности, по обеспечению (к 2018 г) более 650 локальных точек почти в 30 странах средствами радиационного контроля и оснащению свыше 100 портов системами непроникающего контроля, что позволит охватить сканирующим досмотром до 50% мирового морского грузопотока (по данным вебсайта Агентства радиационной и национальной безопасности (US Radiation and National Security) 2011 г).
Технической задачей настоящего изобретения являются реализация способа непроникающего досмотра транспортных средств и контейнеров с высокой пропускной способностью (до 200 единиц транспорта в час) посредством полного радиографического сканирования средства транспорта за исключением кабины водителя в процессе продвижения этого средства транспорта его водителем сквозь тоннель сканирования и реализация системы для осуществления данного способа, оптимально адаптируемой к геометрии стандартного ISO-контейнера для оперативной транспортировки всеми традиционными видами транспорта (воздушным, железнодорожным, водным и автомобильным) в районы, требующие гарантий высокого уровня безопасности.
Способ неинтрузивного контроля по настоящему изобретению устраняет упомянутые выше недостатки за счет регулирования доступа инспектируемого транспорта в зону сканирования, ограничиваемую подсистемой защиты закрытой зоны, с помощью подсистемы автоматического управления движением транспорта, которая автоматически подает управляющие команды системе внешней индикации, считывая текущую скорость движения транспортного средства и отображая оптимальную скорость, необходимую для точного сканирования. Транспортное средство въезжает с помощью водителя в зону сканирования через сканирующую конструкцию, именуемую далее „портал". Этот портал с одной стороны оснащен источником излучения низкой интенсивности, а с другой стороны - панелью детекторов излучения. Транспортное средство должно приближаться к порталу со скоростью, визуально рекомендуемой водителю посредством системы наружной индикации. Скорость измеряется с помощью спидометра, установленного на портале или поблизости от него. Источник излучения активируется, когда транспортное средство приближается к порталу с рекомендуемой скоростью после идентификации конца кабины водителя с помощью специальной системы. Сканирование автоматически прекращается в случаях, когда: сканируемое транспортное средство полностью пересекло границу фермы, на которой смонтированы детекторы, зафиксировано пересечение посторонними лицами границы закрытой зоны, срабатывает датчик сближения, подающий аварийный сигнал опасного приближения проходящего сканирование транспорта к несущей датчики конструкции, транспорт движется со скоростью, ниже заданного предела, при которой сканирование может пагубно воздействовать на здоровье пассажиров, и транспорт движется со скоростью, выше заданного предела, при которой сканирование проходит в ненадлежащем режиме. Сканирование может быть прервано оператором вручную в любой момент времени. В процессе сканирования транспорта на дисплее оператора синхронно отображается содержимое движущегося досматриваемого груза. В конце фазы сканирования, сразу же после отключения источника излучения, дезактивируется автоматическая система защиты периметра закрытой зоны.
Источником излучения в системе непроникающего контроля по настоящему изобретению может быть естественный радиоактивный материал, генератор рентгеновских лучей или линейный ускоритель. Материал для использования в естественном источнике излучения (в данном случае – Co60 с двойной инкапсуляцией, энергией испускаемых фотонов 1,17 МэВ и 1,33 МэВ и активностью источника 1 кюри) выбирают исходя из требуемого уровня проникновения и величины площади закрытой зоны на участке сканирования. Капсула, содержащая радиоактивный материал, герметизирована в контейнере, имеющем экранирование, достаточное для поддержания на внешней поверхности контейнера уровня радиации в пределах допустимых величин, установленных Международным агентством по атомной энергии (МАГАТЭ). Радиационнозащитный экран снабжен щелью для формирования радиационного луча с углом раствора 70 градусов, коллимируемого по ширине примерно 18 см, при размещении источника на расстоянии 4,3 метра от детектора. Система привода для перевода тяг канала источника в положение открытия источника должна гарантировать автоматический отвод радиоактивной капсулы в положение закрытия источника для прекращения излучения при возникновении сбоя в работе сканирующей системы или самой системы приводов. Положение тяг канала источника, в котором источник открыт, и, соответственно, активация лучевого туннеля сопровождаются акустической и оптической сигнализацией, предупреждающей оператора и находящихся поблизости лиц в случае наличия радиации за пределами закрытой зоны сканирования. При использовании этого типа источника излучения глубина проникновения может достигнуть 180 мм в толщу стали. Естественный источник излучения имеет гарантию использования в течение 5 лет 24 часа в день 365 дней в году. В процессе сканирования транспортного средства, проходящего через портал со скоростью по меньшей мере 10 км/ч, доза облучения шофера и пассажиров очень низка - до 0,078 мкЗв (микрозиверт) за сеанс сканирования.
При использовании генератора рентгеновского излучения с максимальной энергией фотона 250 кэВ, ослабляемой фильтром из Fe/Ni/Co толщиной 0,4 мм и дополнительным фильтром из Аl толщиной 4 мм, при анодной плотности мощности 1 мА, интегрированная доза облучения водителя за сеанс сканирования также составляет 0,078 мкЗв. Система управления пучком излучения основана на принципе избыточного дублированного управления и включает:
- электрическое управление через включение/выключение электропитания;
- электромеханическое управление блокировкой пучка коллиматора с помощью исполнительного устройства, закрывающего створку затвора; створка затвора позволяет легко включать и выключать пучок излучения, минимизируя интервал времени между завершением распознавания кабины и началом сканирования; таким образом сканируется весь контейнер без каких-либо потерь изображения; в случае внезапного нарушения электроснабжения излучение прерывается менее, чем через 10 миллисекунд.
Для сравнения доза облучения за время перелета из Нью-Йорка в Лос-Анджелес (примерно 8 часов) составляет между 20 и 50 мкЗв, в то время как при рентгене грудной клетки пациент получает дозу облучения около 100 мкЗв. При томографии головного мозга тот же пациент получает дозу облучения 1100 мкЗв. Максимально допустимая доза облучения населения вне закрытых зон не должна превышать 1000 мкЗв в год (согласно требованиям Национального комитета по контролю ядерной радиоактивности CNCAN NSR 01) - дозу, эквивалентную 35 сеансам сканирования в день 365 дней в году при применении оборудования по настоящему изобретению.
В другом варианте способа досмотра транспортные средства, в порядке очереди ожидающие сканирование, останавливаются у шлагбаума на въезде в закрытую зону, водители представляют сопроводительные документы оператору в передвижном центре управления (ПЦУ /МСС), после чего шлагбаум поднимается, загорается зеленый свет светофора, и транспортное средство получает разрешение на въезд в закрытую зону, периметрическая защита которой деактивирована. Водители выстраивают транспорт в колонну в порядке очереди в обозначенной зоне сканирования, после чего покидают ее. Активируется периметрическая защита, и оператор из ПЦУ дистанционно инициализирует процесс сканирования, подавая посредством всенаправленной антенны команды мобильному сканирующему устройству (МСУ). Активируется источник излучения, и МСУ начинает движение на пониженной скорости вдоль транспортной колонны. Сканирование автоматически прекращается в случаях, когда: несущая датчики конструкции достигла конца транспортной колонны, достигнут конец заранее запрограммированной продолжительности сканирования, зафиксировано проникновение в закрытую зону, срабатывают системы ограничения, определяющие максимальную длину сканирования, срабатывает датчик сближения, подающий аварийный сигнал при опасном приближении несущей датчики конструкции к сканируемому транспорту. В конце цикла сканирования сканируются сопроводительные документы с сохранением информации в базе данных, результирующее изображение выводится на экран оператора на ПЦУ, и периметрическая защита закрытой зоны автоматически деактивируется. Водители забирают документы, возвращаются к транспортным средствам, на выезде открывается шлагбаум, и загорается зеленый свет светофора, транспорт покидает закрытую зону, мобильное сканирующее устройство (МСУ) возвращается в исходное положение, опускается шлагбаум, и цикл сканирования может быть возобновлен.
Система для осуществления описанного выше способа включает сканирующее устройство, установленное на автомобильном шасси, где смонтирована конструкция, несущая панель детекторов, имеющую площадь в соответствии с типом используемого излучения. Для транспортировки несущая конструкция складывается, обеспечивая минимальные габариты, соответствующие официальным допускам для автодорожного транспорта и предусматривающие погрузку в стандартный ISO-контейнер. При складывании несущей конструкции полная масса оптимально распределяется между всеми колесами. Для сканирования несущая конструкция раскладывается в виде П-образной фермы, в основании которой на уровне размещения панели детекторов установлен источник излучения.
Развертывание несущей конструкции выполняется автоматически посредством команд, поступающих от программируемого логического контроллера (ПЛК) на систему пропорциональных гидроклапанов. Для балансировки массы несущей конструкции перед развертыванием сканирующей системы из конфигурации транспортировки в конфигурацию сканирования на землю с помощью гидроцилиндра автоматически опускается вспомогательное опорное колесо, расположенное в основании несущей датчики фермы. Мобильное сканирующее устройство включает также подсистему контроля положения и подсистему гидравлической трансмиссии, предназначенные для управления тихоходным движением мобильного сканирующего устройства в полном сборе. Сканирующая система также включает передвижной центр управления (ПЦУ), размещаемый вне закрытой зоны и предназначенный для дистанционного управления всеми операциями в процессе непроникающего досмотра. Передвижной центр управления оснащен системой сбора, обработки, хранения и отображения результатов радиографической съемки. Кроме того, сканирующая система включает систему защиты периметра и автоматизированную подсистему организации движения транспорта.
Мобильная сканирующая установка (МСУ) имеет в основании кузовную платформу на шасси, далее называемую надстройкой, на которой смонтирован стабилизатор несущей конструкции, встроенный в поворотную секцию, которая обеспечивает вращение в перпендикулярной поперечной к шасси плоскости. Конструкция, на которой размещены датчики, составлена из 3 сегментов: фиксированного сегмента, далее называемого стационарной опорой, жестко закрепленной на стабилизаторе, С-образного поворотного сегмента, одним концом закрепленного на опоре в двухсекционном складном основании и вторым концом сочлененного со складным в 1 колено сегментом, называемым далее конечным сегментом, в основании которого смонтирован источник проникающего излучения. Опора и поворотный сегмент снабжены датчиками, смонтированными вдоль металлической стойки несущей фермы. В транспортировочной конфигурации несущая датчики ферма сложена С-образно вдоль шасси для ее развертывания в конфигурацию сканирования в такой последовательности:
- вспомогательное колесо, предназначенное для балансировки массы шасси, расположенное в основании несущей датчики фермы, посредством гидроцилиндра автоматически опускается на землю;
- конечный сегмент жестко заблокирован электромагнитным замком в надстройке в вертикальном положении;
- поворотный С-образный сегмент поднимается вращением вокруг [общей продольной оси] стационарной опоры и заблокированного электромагнитным замком конечного сегмента вертикально вверх, образуя П-образную ферму в одной плоскости со стационарной опорой и конечным сегментом с источником излучения под углом 90 градусов к плоскости шасси;
- конечный сегмент освобождается от жесткой блокировки электромагнитным замком в гнезде надстройки, и блокируется другим электромагнитным замком в сочленении с поворотным сегментом;
- поворотный и конечный сегменты поворачиваются в горизонтальной плоскости вокруг опоры на 90 градусов относительно исходного положения, образуя рядом с шасси П-образную ферму и завершая таким образом развертывание системы в конфигурацию сканирования.
Система стабилизации регулирует положение смонтированной на ней несущей детекторы конструкции вращательными движениями в вертикальной плоскости, [условно] проходящей по поперечной оси плоскости шасси. За счет этого при сканировании несущая конструкция постоянно удерживается на требуемом расстоянии от сканируемого объекта в вертикальной плоскости независимо от рельефа поверхности, для чего используются инклинометр, измеряющий величину крена фермы с датчиками, и вспомогательное колесо, регулируемое гидроцилиндром, благодаря чему горизонтальный сегмент фермы всегда сохраняет горизонталь. Эта система стабилизации, называемая далее стабилизатором изображения, оказывает влияние на линейность рентгенографии сканирующей системы, устраняя геометрические искажения изображения, вызываемые неровностями грунта рабочей площадки.
Подсистема гидравлической трансмиссии, используемая для тихоходного движения, встроена в автомобильную трансмиссию шасси между коробкой передач и коробкой заднего моста и приводится в действие карданным валом, который воспринимает вращение от коробки передач и передает его на дифференциальную группу заднего привода. Эта подсистема активируется механизмом отбора мощности, оснащена тахометрическим датчиком, гидравлическим двигателем, гидравлическим насосом с электронно регулируемым расходом и управляется специализированным программным обеспечением для автоматизированной организации движения.
Подсистема сбора, обработки, хранения и отображения радиографических изображений включает множество блоков усиления, соединенных с детекторами, множество блоков мультиплексирования, множество аналого-цифровых преобразователей, множество контроллеров, шина данных Ethernet и множество блоков коммутирования Ethernet, которые концентрируют сигналы и пересылают на процессор, исполняющий целевое приложение, ассоциированное через ЛВС с другим процессором, исполняющим другое приложение, обеспечивающее визуализацию изображения сканируемого транспорта.
Такая система непроникающего контроля гарантирует целостность и достоверность документации, относящейся к сканируемому транспорту, данных аудио- и видеонаблюдения за периметром зоны сканирования и сохранность файлов комплексных данных по результатам досмотра в цифровом формате в электронных папках с уникальным идентификатором. Доступна опция получения видеоизображения из-под транспортного средства.
Практическое использование данного изобретения обеспечивает следующие преимущества:
- более высокая пропускная способность в единицу времени сканирования (до 200 большегрузных и до 500 легких транспортных средств);
- низкая доза облучения, не превышающая 0,078 мкЗв, водителя за рулем транспорта, проходящего сканирование в режиме проезда;
- полный досмотр транспортного средства, включая кабину водителя, в любом режиме сканирования;
- выявление нелегальных иммигрантов без какого-либо вреда для их здоровья;
- возможность погрузки системы в стандартный ISO-контейнер для оперативной и безопасной транспортировки воздушным, водным, железнодорожным или автотранспортом в любую точку мира (уникальный отличительный признак для мобильной системы [подобного назначения]);
- отсутствие профессионального риска облучения оператора или случайного риска облучения постороннего лица в случае проникновения в закрытую зону;
- исключение какого-либо риска возникновения жертв в случае взрыва досматриваемого транспорта;
- сокращение минимального штата операторов одной смены с 3 до 1;
- применение стабилизатора изображения, поддерживающего горизонтальное положение несущей датчики конструкции независимо от движения шасси;
- высокая мобильность, гибкость и управляемость системы;
- высокий уровень автоматизации;
- высокая пропускная способность - до 200 единиц транспорта в час - за счет сокращения времени простоев благодаря автоматизации управления технологическими процессами.
- точное регулирование скорости и расстояния при работе сканирующей системы;
- сохранение динамических характеристик ходовой части в режиме транспортировки;
- полная масса системы значительно уменьшена с положительным эффектом для снижения риска опрокидывания автомобиля и повышения приемистости. Общая масса мобильной сканирующей установки составляет 5,2 тонны, 1 тонну весит передвижной центр управления, что делает эту систему самой легкой в своем классе на рынке.
Способ неинтрузивного контроля, или непроникающего досмотра, по настоящему изобретению имеет следующий порядок осуществления:
- активируется защита периметра закрытой зоны;
- оператор из передвижного пункта управления инициирует процесс сканирования, запуская мобильную сканирующую установку с арочным порталом;
- активируются системы измерения скорости приближающегося к порталу транспорта и управления транспортным потоком;
- при приближении к зоне портала транспортное средство фотографируется спереди, включается источник излучения, и начинается сканирование при скорости движения транспорта 10-15 км/ч;
- процесс сканирования автоматически прерывается в следующих случаях:
- при проникновении в закрытую зону постороннего лица;
- при срабатывании датчика сближения, подающего предупреждающий сигнал об опасном приближении сканируемого транспорта к несущей датчики конструкции;
- при движении транспорта со скоростью ниже 10 км/час, при которой водитель и пассажиры могут подвергнуться воздействию повышенной дозы радиации;
- при движении транспорта со скоростью выше 15 км/ч, при которой снижается качество сканируемого изображения;
- при завершении прохождения портала транспортным средством;
- сгенерированное радиографическое изображение поступает из передвижного центра управления на экран оператора;
- создается и архивируется папка с уникальным идентификатором, в которой сохраняются сканограмма и фотография транспорта.
Способ неинтрузивного контроля по настоящему изобретению в режиме последовательного сканирования осуществляется следующим образом:
- транспортные средства, подлежащие досмотру, останавливаются у шлагбаума на въезде в зону сканирования;
- водители покидают транспортные средства и представляют сопроводительные документы оператору в передвижном центре управления;
- въезд в зону сканирования разрешен, поднимается шлагбаум, загорается зеленый свет светофора, деактивируется подсистема защиты закрытой зоны;
- водители выстраивают свой транспорт в зоне сканирования в колонну по заданной разметке и покидают закрытую зону;
- активируется защита периметра закрытой зоны;
- оператор запускает процесс сканирования, подавая по радио из центра управления команду мобильной сканирующей установке;
- включается источник излучения, после чего начинается медленное движение сканирующего устройства. Система движется прямолинейно с постоянной скоростью вдоль досматриваемых транспортных средств. Скорость мобильной сканирующей установки регулируется автоматически с помощью электронных и информационных модулей на ее борту. Эти модули связаны через радиомодем по ЛВС (LAN) с центром управления, получая команды в режиме обратной связи;
- сканирование автоматически прекращается в следующих случаях:
- при прохождении несущей датчики фермой границы досматриваемой колонны транспорта, когда система отображения принимает серию белых полос, означающих максимальный уровень облучения всех датчиков;
- при достижении конца запрограммированной продолжительности сканирования;
- при срабатывании системы ограничения максимальной скорости движения;
- при обнаружении проникновения в закрытую зону;
- при срабатывании датчика сближения, подающего сигнал предупреждения об опасном приближении несущей датчики конструкции к сканируемому транспорту;
- вся сопроводительная документация копируется и вносится в базу данных;
- радиографическое изображение транспортных средств выводится на монитор в центре управления;
- по окончании цикла сканирования защита периметра закрытой зоны деактивируется;
- водители прошедших досмотр транспортных средств получают назад сопроводительные документы;
- поднимается шлагбаум на выезде, загорается зеленый свет светофора, и транспорт покидает территорию;
- мобильная сканирующая установка возвращается в исходное положение;
- шлагбаум на выезде опускается, после чего рабочий цикл может быть возобновлен;
- на каждое транспортное средство формируется файл, содержащий радиографические и фотоизображения и копии всех сопроводительных документов, который затем сохраняется под уникальным идентификатором.
Далее приведен пример осуществления изобретения со ссылкой на фигуры 1-13, на которых изображены:
на фигуре 1 - вид в перспективе системы непроникающего контроля внутри закрытой зоны сканирования согласно настоящему изобретению;
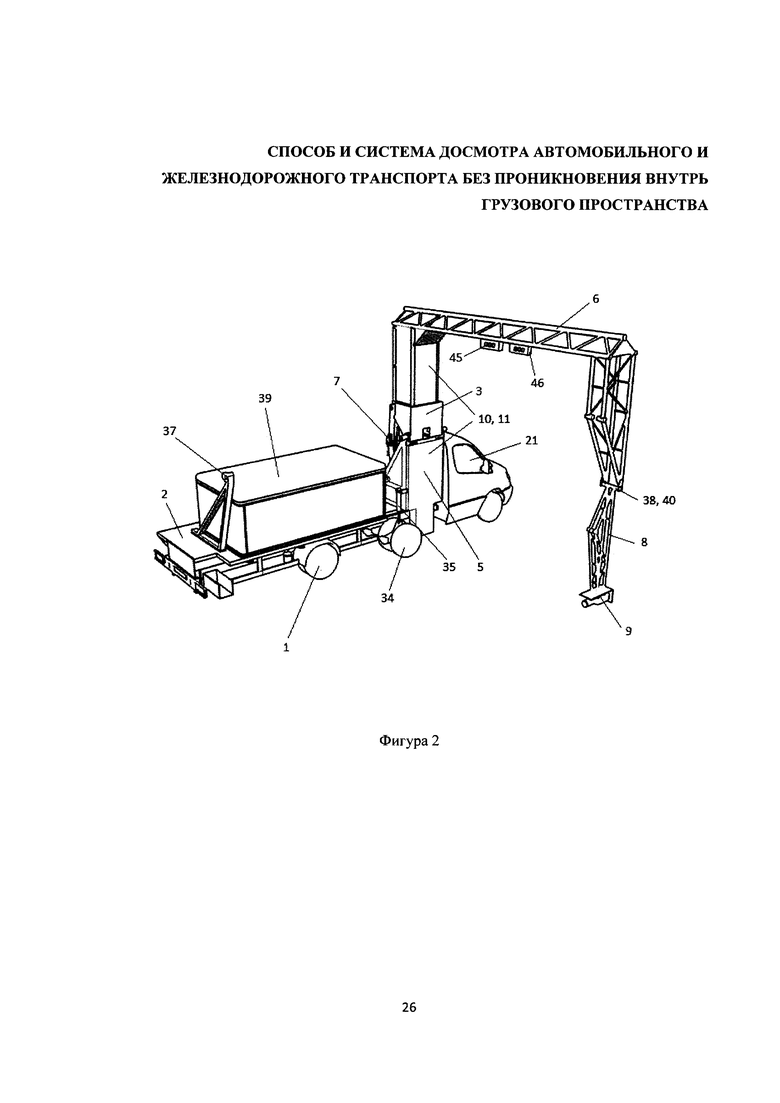
на фигуре 2 - вид в перспективе мобильной сканирующей установки (МСУ / MSU) в конфигурации сканирования;
на фигуре 3 - вид сзади мобильной сканирующей установки;
на фигуре 4 - вид слева кабины водителя в конфигурации сканирования;
на фигуре 5 - геометрия процесса сканирования;
на фигуре 6 - вид сбоку системы непроникающего контроля в транспортной конфигурации;
на фигуре 7 - вид сверху схемы системы гидропривода;
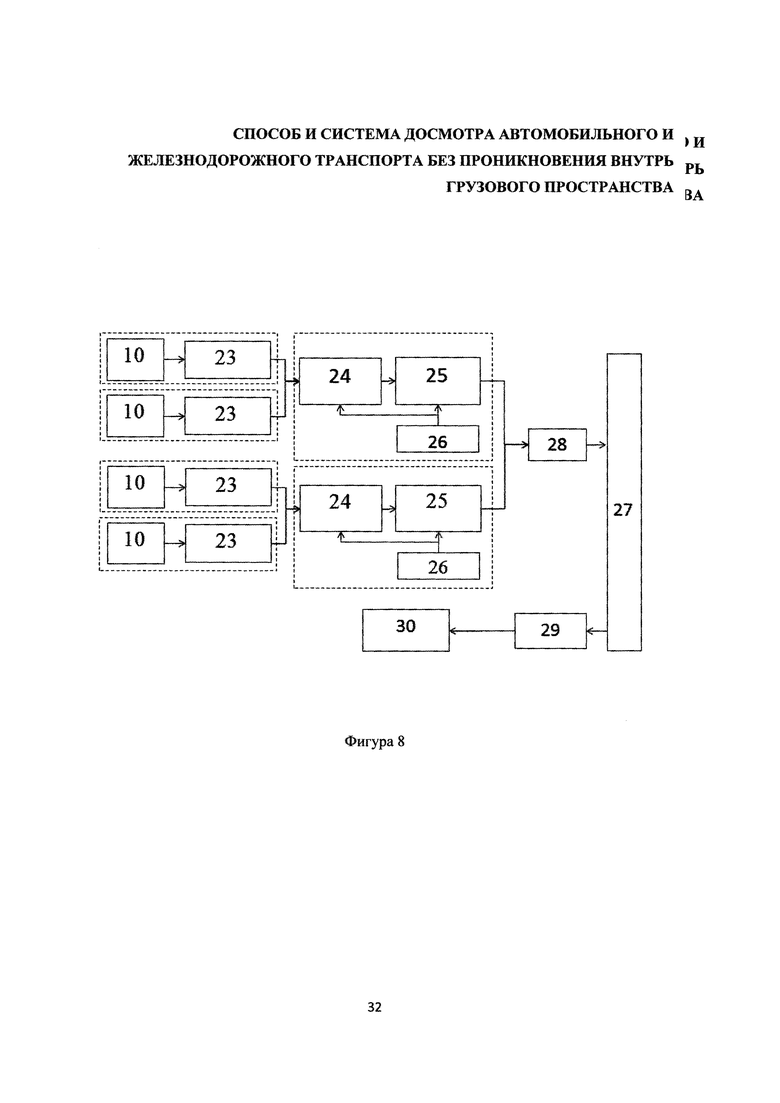
на фигуре 8 - принципиальная блочная схема системы отображения;
на фигуре 9 - блок-схема непроникающего контроля.
Система непроникающего контроля по настоящему изобретению представляет собой мобильную установку неинтрузивного сканирования, собранную на легком самоходном автомобильном шасси 1, на кузовной платформе, далее называемой надстройкой 2, на которой смонтирован стабилизатор несущей детекторы фермы 3 на шарнирной секции 4, способной к вращению в перпендикулярной поперечной к шасси плоскости. Несущая детекторы конструкция 3 выполнена из стали и легких металлов и составлена из 3 сегментов: стационарной опоры 5, С-образного поворотного сегмента 6, одним концом закрепленного на опоре в 2-секционном складном основании 7 и вторым концом сочлененного с конечным сегментом 8, в основании которого смонтирован источник проникающего излучения 9. Опора и поворотный сегмент по всей длине представляют собой панель для установки детекторов 10, смонтированную на металлической стойке 11.
В ходовую часть шасси между коробкой передач 12 и дифференциалом заднего привода 13 встроена подсистема гидравлической трансмиссии 14, действующая от приводного вала и предназначенная для тихоходного движения шасси 1. Эта подсистема снабжена механизмом отбора мощности 16, датчиком тахометра 17, гидравлическим двигателем 18, гидравлическим насосом 19 с переменным расходом, регулируемым электронным модулем 20, и управляется специальной подсистемой автоматической регулировки скорости и направления 21.
Подсистема сбора, обработки, хранения и отображения радиографических изображений 22 включает множество блоков усиления 23, соединенных с детекторами 10, множество блоков мультиплексирования 24, множество аналого-цифровых преобразователей 25, множество контроллеров 26, шина данных Ethernet 27 и множество блоков коммутирования Ethernet 28. Эта подсистема, размещенная в передвижном центре управления 31, получает сигналы данных с детекторных панелей, смонтированных на несущей ферме 3, обрабатывает, оцифровывает и пересылает их через радиомодем 29 на процессор 30, выполняющий специализированное приложение визуализации рентгенографии сканируемого объекта. Оператор анализирует получаемые изображения и в память на различных носителях.
Для эффективной защиты зоны сканирования транспортных средств от возможного облучения случайно проникших посторонних лиц предусмотрена подсистема защиты периметра 32, которая определяет прямоугольную закрытую зону а.
Компьютерная подсистема управления 33 дистанционно подает команды и контролирует их исполнение всеми подсистемами всего комплекса, осуществляя беспроводное управление по ЛВС направлением, скоростью двигателя и позиционированием системы в закрытой зоне, как и различными периферийными устройствами, относящимися к изобретению.
Все средства аппаратного обеспечения автоматизированной подсистемы управления 33, а также автоматизированное рабочее место оператора размещены в передвижном центре управления 31, который при транспортировке буксируется самоходным шасси 1, а во время сканирования находится за пределами закрытой зоны а.
Мобильная сканирующая установка по изобретению предусматривает 2 варианта конфигурации: для сканирования и для транспортировки. Реконфигурация компонентов установки для перевода из одного режима в другой выполняется с помощью набора гидроцилиндров.
В конфигурации транспортировки поворотный сегмент 6 сложен вдоль надстройки 2 на самоходном шасси 1, а несущая датчики ферма 3 сложена в форме буквы С, что обеспечивает соответствие требованиям к габаритам транспорта на общественных дорогах и равномерное распределение массы на каждое колесо. Вспомогательное колесо 34, размещенное в основании несущей датчики конструкции 3 при этом не приводится в действие гидроцилиндром 35, и остается подвешенным к шасси, никогда не соприкасаясь с землей. Компоненты подсистемы автоматического регулирования движения автотранспорта 36 упакованы на кузовной платформе [2] шасси 1, а механизм отбора мощности 16 переключен в режим транспортировки, при котором карданный вал напрямую соединяет коробку передач 12 с коробкой привода заднего моста 13.
В режиме сканирования механизм отбора мощности 16 переключается таким образом, что приводной вал передает мощность от коробки передач 12 напрямую на гидронасос 19, гидравлически связанный с гидромотором 18, который механически сопряжен с дифференциалом заднего привода 13.
В „режиме сканирования" вспомогательное колесо 34 с помощью гидроцилиндра 35 опускается на грунт, принимая на себя часть массы шасси 1, при этом инклинометр 46 определяет угол наклона несущей датчики конструкции 3, которая должна двигаться в вертикальной плоскости независимо от рельефа участка движения. Конечный сегмент 8 остается заблокированным в вертикальном положении на надстройке 2 под действием электромагнитного замка 37. С-образный поворотный сегмент 6 раскладывается вращательным движением относительно стационарной опоры 5 и конечного сегмента 8, заблокированного электромагнитным замком 37, и принимает вертикальное положение в одной плоскости с опорой 5, образуя угол 90 градусов между плоскостью шасси 1 и плоскостью конечного сегмента 8, при этом несущая конструкция принимает форму П-образной фермы. Затем, электромагнитный замок 37 разблокирует конечный сегмент 8 из жесткого сцепления с шасси 1, после чего другой электромагнитный замок 38 жестко блокирует его в сочленении с поворотным сегментом 6, который, совершая поворот на 90 градусов вокруг опоры 5, образует вместе с конечным сегментом 8 П-образную ферму под прямым углом справа от шасси 1, в результате чего система принимает конфигурацию режима сканирования.
Передвижной центр управления 31 располагают за пределами закрытой зоны а, ограничиваемой по периметру подсистемой периметрической защиты 32.
Шасси 1 должно соответствовать действующим международным стандартам, разрешающим транспорту выезд на общественные дороги без специального разрешения. На шасси 1 установлена надстройка 2, несущая все элементы мобильной сканирующей установки: компоненты гидравлической системы, включающей масляный бак, гидрораспределители, блоки схем безопасности и управления, электрические и электронные распределительные шкафы 39. Большинство этих подсистем не отображены, поскольку являются общепринятыми обязательными составляющими и не включены в формулу.
Неразъемные сегменты несущей датчики конструкции, опора 5 и другие сегменты выполнены из нержавеющей стали и сконструированы таким образом, что полная масса системы снижена, что делает ее сегодня самой легкой и мобильной системой непроникающего контроля на рынке.
Опора 5 установлена на надстройке 2 посредством двух соединений, составляющих систему стабилизации несущей детекторы конструкции на шасси справа за кабиной водителя, где размещены подсистемы автоматизированного управления скоростью и направлением. На вершине опоры 5 посредством двухсекционного сочленения 7 закреплен С-образный поворотный сегмент 6. На другом конце С-образного сегмента посредством одноколейного поворотного сочленения 40 закреплен конечный сегмент 8, в основании которого установлен источник проникающего излучения 9. Состоящая из трех названных сегментов несущая датчики конструкция 3 приобретает форму П-образной фермы и отводится поворотом [вокруг вертикальной оси] от шасси 1 в сторону зоны сканирования.
Источник проникающего излучения 9 смонтирован в основании третьего, конечного 8, сегмента несущей детекторы фермы в параллельной с шасси 1 плоскости для коллимации пучка излучения b на панели детекторов на опоре 5 и на части поворотного сегмента 6. В зависимости от выбранного источника радиации система по настоящему изобретению имеет на опоре 5 и на части поворотного сегмента 6 панели детекторов, предназначенных для преобразования улавливаемого проникающего излучения в электрические сигналы, которые обрабатываются далее в радиографические изображения сканируемого транспорта. В силу этого при использовании генератора рентгеновского излучения применяют гибридные детекторы на сцинтилляционных кристаллах и фотодиодах или монолитные детекторы со связанными контурами нагрузки; при использовании источника гамма-излучения применяют гибридные детекторы на сцинтилляционных кристаллах с фотоэлектронным умножителем. Детекторы настраивают в зависимости от выбранного источника излучения и конструктивного решения по их размещению в один ряд, в 2 ряда или в виде матрицы переменной конфигурации.
Подсистема защиты периметра 32 закрытой зоны а представляет собой контур активной радиологической защиты, воздействующей непосредственно на источник проникающего излучения 9, который автоматически отключается в случае проникновения в закрытую зону а во избежание случайных утечек радиации. Активные датчики, составляющие подсистему периметрической защиты, размещены попарно в крайних точках закрытой зоны а под углом 90 градусов относительно друг друга и образуют виртуальное пространство, ограниченное площадью 20×20 квадратных метров и высотой 2 м. Эти датчики постоянно сообщаются посредством беспроводной связи с передвижным центром управления 31, в направлении которого в случае пересечения границы указанного виртуального пространства они посылают сигнал тревоги, автоматически отключающий источник 9 и задействующий текстовое, голосовое и графическое сообщение в структуре операторского интерфейса ПО с локализацией места проникновения. Подсистема рассчитана на работу в экстремальных метеорологических условиях, таких как дождь, снегопад, ветер, критические температуры и т.п.Периметрическая защита деактивируется для открытия входа/выхода в закрытую зону.
При применении как способа сквозного проезда, так и второго способа досмотра, максимальная доза облучения водителя транспортного средства составляет 0,078 мкЗв.
Расчет дозы облучения, получаемого водителем в режиме сканирования, выполняют, учитывая следующие переменные. На фигуре 4 отображены: источник проникающего излучения А, пространство, занимаемое водителем во время сканирования В, панель детекторов С и два луча проникающего излучения D, которые обозначают ширину пучка излучения d1 в месте нахождения водителя и d2 ширину пучка при падении на детекторы излучения. D1 - расстояние от источника до водителя, D2 - расстояние от источника до детекторов и D3 - пространство, где находится водитель. Для расчетов приняты два типа значений: предварительно заданные (полученные прямыми измерениями, вычислениями, практическими методами) и расчетные (с использованием предварительно заданных значений в математических формулах). Таким образом, действующий уровень мощности I генератора определен как 0,5 мА, расстояние от источника до детекторов D2 составляет 4,5 м, расстояние от источника до водителя D1 -1,5 м (исходя из наиболее пагубного сценария), толщина пучка на детекторах d2=30 мм (получено эмпирически), радиус пространства водителя D3 - 0,3 м, скорость продвижения водителя сквозь пучок излучения в процессе сканирования - 10 км/ч (=2,78 м/с), и коэффициент рассеяния излучения c2 - 2%.
Для определения дозы излучения при сканировании применяли следующую математическую формулу:
Доза = (интенсивность дозы на уровне водителя) × (время облучения водителя) × (поверхностный коэффициент) × (1+коэффициент рассеивания),
где: интенсивность дозы на уровне водителя рассчитывали с применением формулы: (интенсивность дозы в потоке генератора) × (текущая интенсивность потока)/(расстояние от источника до водителя)2.
Интенсивность дозы рентгеновского излучателя определяли с помощью специального программного приложения, рассчитывающего спектр тормозного излучения (bremstrahlung) и использующего в качестве входных следующие параметры: пиковая энергия 250 кэВ с медным фильтром 2 мм, а в качестве выходных данных - величина дозы, генерируемой рентгеновским излучателем на расстоянии 1 м. В результате расчетов доза составила 96 [мкЗв/мКл], и, зная текущую интенсивность потока и расстояние от излучателя до водителя (1,5 м), получили интенсивность дозы на уровне водителя = 21,33 [мкЗв/сек].
Время воздействия излучения на водителя вычисляли по следующей формуле: (пространство, занимаемое водителем / скорость сканирования) и получили 0,108 сек.
Коэффициент поверхности рассчитывали по формуле: (ширина пучка на уровне водителя / занимаемое водителем пространство).
Ширину пучка рассчитывали по формуле: (ширина пучка на детекторах × расстояние от излучателя до водителя) / (расстояние от излучателя до детектора), результат составил 10 мм.
Таким образом, коэффициент поверхности = 0,033.
В итоге получили общую интенсивность дозы облучения за процесс сканирования, которая составила 0,078 мкЗв.
Согласно документу №115 Международного агентства по атомной энергии (МАГАТЭ) максимально допустимая доза профессионального облучения одного человека от одного источника составляет 0,3 [мЗв/год], что эквивалентно 3830 сеансам сканированиям с использованием данного изобретения в год (более 10 сеансов в день), а согласно публикации Национального комитета по контролю ядерной активности (CNCAN) NSR01/2000, Румыния, максимально допустимая профессиональная доза для человека от одного источника составляет 1 [мЗв/год], что эквивалентно 12755 сеансам сканирования с использованием данного изобретения в год (более 34 сеансов в день). Если предположить, что данное изобретение используется на границе, и водитель на практике пересекает этот пограничный контрольно-пропускной пункт два раза в день, в действительности он никогда не сможет пройти максимально допустимое количество сеансов сканирования с помощью такого устройства. Если же допустить, что при определенных условиях существует вероятность превышения предельного количества сканирований, рассчитанного выше, то данная система предусматривает хранение в базе данных информации обо всех прошедших сканирование водителях и ведение счета количества прохождений каждого водителя через сканер и выдает оператору предупреждающее сообщение о достижении допустимого числа сеансов сканирования.
Для реализации способа досмотра последовательным сканированием данная система кроме подсистемы защиты периметра 32 включает также подсистему автоматизированного регулирования движения транспорта 36, управляющую шлагбаумами 41, 42 и светофорами 43, 44, установленными на въезде и выезде зоны сканирования. Управление этой подсистемой осуществляется автоматически с помощью целевого программного приложения. Информация о состоянии шлагбаумов и светофоров отображается посредством графического интерфейса оператора. Команды и информация о состоянии передаются через соответствующие интерфейсы и радиомодемы.
Передвижной центр управления 31 контролирует и регулирует работу всех компонентов и периферийных устройств мобильной системы сканирования, обеспечивая автоматизацию технологических процессов.







Использование: для непроникающего досмотра транспортных средств. Сущность изобретения заключается в том, что система для осуществления указанного способа включает мобильную сканирующую установку на автошасси, где размещена конструкция, несущая оснастку, в которую входят панели детекторов, соответствующих выбранному типу проникающего излучения. Для транспортировки несущая конструкция складывается, обеспечивая минимальные габариты. Для сканирования несущая конструкция раскладывается, приобретая П-образную форму, и имеет с одной стороны в основании источник проникающего излучения, а с противоположной стороны - панель детекторов. Сканирующая система включает также передвижной центр управления, размещаемый за пределами закрытой зоны а и дистанционно управляющий всеми технологическими процессами непроникающего досмотра. Передвижной центр управления оснащен подсистемой сбора, обработки, хранения и вывода изображений на экран. В систему сканирования входит подсистема защиты периметра и подсистема автоматизированного регулирования движения транспорта. Технический результат: обеспечение возможности высокой пропускной способности и полного радиографического обследования транспорта. 2 н. и 4 з.п. ф-лы, 9 ил.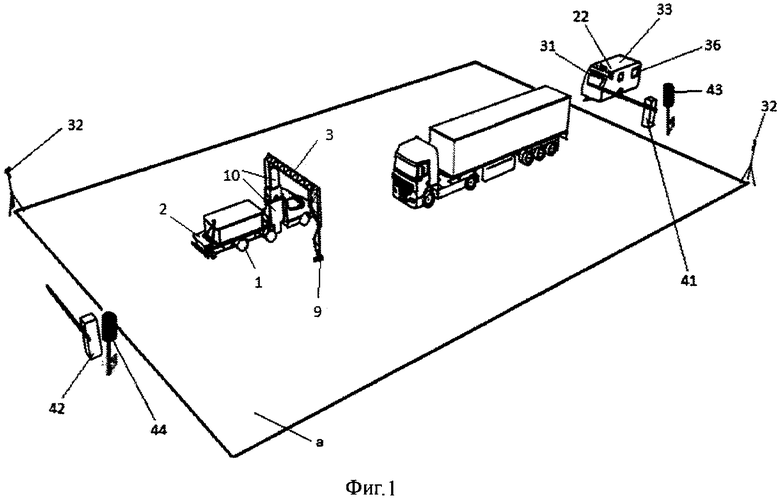
1. Способ непроникающего досмотра транспортных средств путем сканирования излучением, включающий:
a. выстраивание транспортных средств в колонну на площадке согласно разметке;
b. активацию защиты периметра закрытой зоны;
c. подачу оператором из передвижного центра управления, размещенного за внешним периметром закрытой зоны, дистанционной команды мобильной сканирующей установке на инициацию процесса сканирования;
d. включение системы распознавания и измерения скорости транспортных средств, приближающихся к порталу установки;
e. включение системы регулирования движения, отображающей текущую и рекомендуемую скорость транспорта, приближающегося к зоне сканирования;
f. фотосъемку приближающегося к порталу транспортного средства;
g. включение источника проникающего излучения;
h. сканирование транспортного средства, двигающегося со скоростью 10-15 км/ч;
i. автоматическое прерывание процесса сканирования в случаях нежелательного проникновении в закрытую зону извне, срабатывания датчика приближения, сигнализирующего о критическом сокращении расстояния между несущей датчики конструкцией и сканируемым транспортом, уменьшении скорости сканируемого транспорта ниже 10 км/час, способном подвергнуть водителя и пассажиров воздействию повышенной дозы излучения, увеличения скорости сканируемого транспорта выше 15 км/час, вызывающем снижение качества изображения, и после завершения прохождения транспорта через портал;
j. вывод на экран оператора изображения, полученного в процессе сканирования;
k. создание и хранение файла под уникальным идентификатором, содержащего сканограмму и фотографию каждого прошедшего досмотр транспорта;
l. отключение источника излучения, деактивацию подсистемы защиты периметра по завершении процесса сканирования, выезд транспортного средства из закрытой зоны и готовность к возобновлению цикла сканирования.
2. Система непроникающего контроля, предназначенная для осуществления способа по пункту 1, включающая мобильную сканирующую установку на шасси 1 с
размещенной на ней надстройкой 2, оснащенной П-образной несущей оснастку фермой 3, оборудованной с одной стороны панелью детекторов 10 и с другой стороны - источником проникающего излучения 9, образующей портал для прохождения через него транспортных средств, подлежащих сканированию, и обусловливающей границы зоны сканирования, определяемые подсистемой защиты периметра 32 и контролируемые автоматизированной системой регулирования движения 36, осуществляемого автоматически посредством системы внешней индикации 45 путем отображения текущей скорости транспорта и рекомендуемой скорости сканирования, при этом управление всем процессом осуществляется дистанционно от передвижного центра управления 31, размещаемого за пределами закрытой зоны а, осуществляющего радиоуправление системой 21 сбора, обработки, хранения и вывода изображений на экран, а также - подсистемой защиты периметра 32.
3. Система непроникающего контроля по п. 2, включающая несущую оснастку конструкцию 3, имеющую в составе несколько сегментов: сегмент стационарной опоры 5, смонтированной в передней боковой части надстройки 2 на системе стабилизации конструкции, несущей оснастку 3; С-образный поворотный сегмент 6, соединенный посредством двухсекционной складной конструкции 7 с опорой 5 и имеющий подвижность для сборки и вращения; и конечный сегмент 8, закрепленный посредством одноколейного поворотного сочленения 40 со вторым концом поворотного сегмента 6, имеющий в основании встроенный источник проникающего излучения 9; при этом вся несущая оснастку конструкция в сборе имеет П-образную форму.
4. Система непроникающего контроля по п. 2, выполненная с возможностью быстрой подготовки к транспортировке благодаря укладке поворотного сегмента 6 вдоль надстройки 2 на шасси 1 и С-образной форме несущей оснастку конструкции 3, которая в сборе обеспечивает минимальную ширину колеи шасси, и, следовательно, соответствие требованиям по габаритам автотранспорта для эксплуатации на общественных автодорогах, а также - возможность погрузки в стандартный ISO-контейнер.
5. Система непроникающего контроля по п. 2, в составе которой подсистема автоматизированного регулирования движения транспорта 36 действует как внутри закрытой зоны а, так и за ее пределами, дистанционно управляя с помощью специализированного программного обеспечения въездным 43 и выездным 44 светофорами и въездным 41 и выездным 42 шлагбаумами.
6. Система непроникающего контроля по п. 2, в составе которой система
стабилизации изображения управляет несущей оснастку конструкцией 3 посредством инклинометра 46, постоянно измеряющего угол наклона несущей конструкции 3, и вспомогательного колеса 34 с приводом от гидравлического цилиндра 35, которое перед началом сканирования опускается на почву для балансировки шасси за счет принятия части его массы при движении в ходе сканирования и за счет поддержания подвижности несущей оснастку фермы 3 в перпендикулярной поперечной шасси плоскости для удержания ее в стабильном вертикальном положении вне зависимости от рельефа поверхности, на которой выполняется сканирование.
| СИСТЕМА ПРОВЕРКИ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПУТЕМ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И СПОСОБ ВЫБОРОЧНОЙ ЗАЩИТЫ | 2006 |
|
RU2390007C2 |
| СПОСОБ И СИСТЕМА ПРОВЕРКИ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПУТЕМ РАДИАЦИОННОГО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2006 |
|
RU2396512C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИСТОЧНИКОМ ИЗЛУЧЕНИЯ, УСТАНОВКА И СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ | 2006 |
|
RU2383883C2 |
| СИСТЕМА ДОСМОТРА ГРУЗОВ И ТРАНСПОРТНЫХ СРЕДСТВ, ПЕРЕМЕЩАЮЩИХСЯ СВОИМ ХОДОМ, СПОСОБ АВТОМАТИЧЕСКОГО РАДИОСКОПИЧЕСКОГО КОНТРОЛЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ЗОНЫ РАДИАЦИОННОГО СКАНИРОВАНИЯ И СПОСОБ ФОРМИРОВАНИЯ ТЕНЕВОГО ИЗОБРАЖЕНИЯ ИНСПЕКТИРУЕМОГО ОБЪЕКТА | 2010 |
|
RU2430424C1 |
| US 7492861B2, 17.02.2009 | |||
| US 7082186B2, 25.07.2006. | |||

