Уровень техники
[0001] В обрабатывающих установках жидкости и газы направляются через различные трубопроводы и резервуары. Для того чтобы управлять работой установки, необходимо контролировать текущее состояние жидкостей и газов в различных частях установки, а также состояние управляющих устройств, таких как клапаны и горелки. Переменные, контролируемые для определения этих состояний, обычно называются переменными процесса и могут включать в себя давления, перепад давлений, температуры, уровни в резервуарах, положения клапанов и т. п. Эти переменные процесса определяют с помощью одного или более датчиков, которые генерируют электрический сигнал, характеризующий переменную процесса. Поскольку обрабатывающие установки являются динамическими, электрические сигналы, получаемые для переменных процесса, также являются динамическими и имеют тенденцию существенно варьироваться с течением времени.
[0002] Ранее для устранения или подавления вариаций сигналов процесса использовали фильтрацию. В последнее время был введен статистический контроль процесса (SPM), в котором динамика переменных процесса используется в качестве одной меры состояния переменной процесса. При SPM для представления самой переменной процесса может быть определено медианное или среднее значение сигнала переменной процесса, в то время как для обеспечения измерения динамического характера переменной процесса могут быть рассчитаны стандартное отклонение или коэффициент вариации.
[0003] Некоторые переменные процесса имеют нормальную величину вариации или нормальное стандартное отклонение. Когда стандартное отклонение увеличивается выше или значительно ниже нормальной величины стандартного отклонения, это может указывать на аварийные условия в пределах части обрабатывающей установки. Например, если стандартное отклонение датчика перепада давлений падает, это может свидетельствовать о закупоренной импульсной линии.
[0004] Статистические значения, в совокупности именуемые данными SPM, как правило, определяются электроникой в полевых устройствах, такой как датчики, трансмиттеры и устройства управления клапанами, расположенными в среде обработки. Эти полевые устройства могут быть выполнены с возможностью генерации сигналов предупреждения, когда данные SPM пересекают порог, указывающий на аварийную работу. Данные сигналы предупреждения направляются в центральную систему (хост-систему), которая может сделать сигнал предупреждения видимым для оператора. В качестве альтернативы полевое устройство может передавать данные SPM центральной системе через цифровой протокол связи. Центральная система может быть выполнена с возможностью генерации сигналов оповещения, когда данные SPM пересекают различные пороги. Кроме того, в центральной системе может проводиться многовариантный статистический анализ данных SPM.
Сущность изобретения
[0005] Технологическое полевое устройство включает в себя датчик, предоставляющий сигнал, характеризующий переменную процесса, и датчик температуры, предоставляющий сигнал, характеризующий температуру упомянутого датчика. Cхема преобразователей преобразует сигнал датчика в показания датчика, а сигнал датчика температуры в значения температуры. Процессор реализует цифровой фильтр, который фильтрует показания датчика для получения отфильтрованных показаний датчика и выполняет команды статистического контроля процесса, которые вычисляют статистическое значение по отфильтрованным показаниям датчика, причем цифровой фильтр является термозависимым, так что он изменяется по мере изменения значений температуры.
[0006] Измерительная система включает в себя модуль построения фильтра, который строит фильтр верхних частот для фильтрации показаний датчика, характеризующих переменную процесса, при этом модуль построения фильтра устанавливает значения для параметров фильтра на основе значения температуры, характеризующего температуру датчика, который произвел показания датчика.
[0007] В дополнительных вариантах осуществления система управления включает в себя термозависимый фильтр, который фильтрует серию показаний датчика в ответ на значение температуры для получения отфильтрованных показаний. Система управления дополнительно включает в себя блок статистического контроля процесса, который определяет статистическое значение по отфильтрованным показаниям и который подает сигнал предупреждения, когда статистическое значение пересекает порог.
[0008] В способе подготавливаются коэффициенты для параметров термозависимого фильтра. Сначала принимаются сигнал датчика и температурный сигнал, и с помощью параметров термозависимого фильтра и температурного сигнала строится фильтр. Затем сигнал датчика подается на фильтр для получения отфильтрованного сигнала, и из отфильтрованного сигнала генерируется статистическое значение. Когда статистическое значение пересекает порог, активируется сигнал оповещения.
Краткое описание чертежей
[0009] Фиг.1 представляет собой блок-схему обрабатывающей установки.
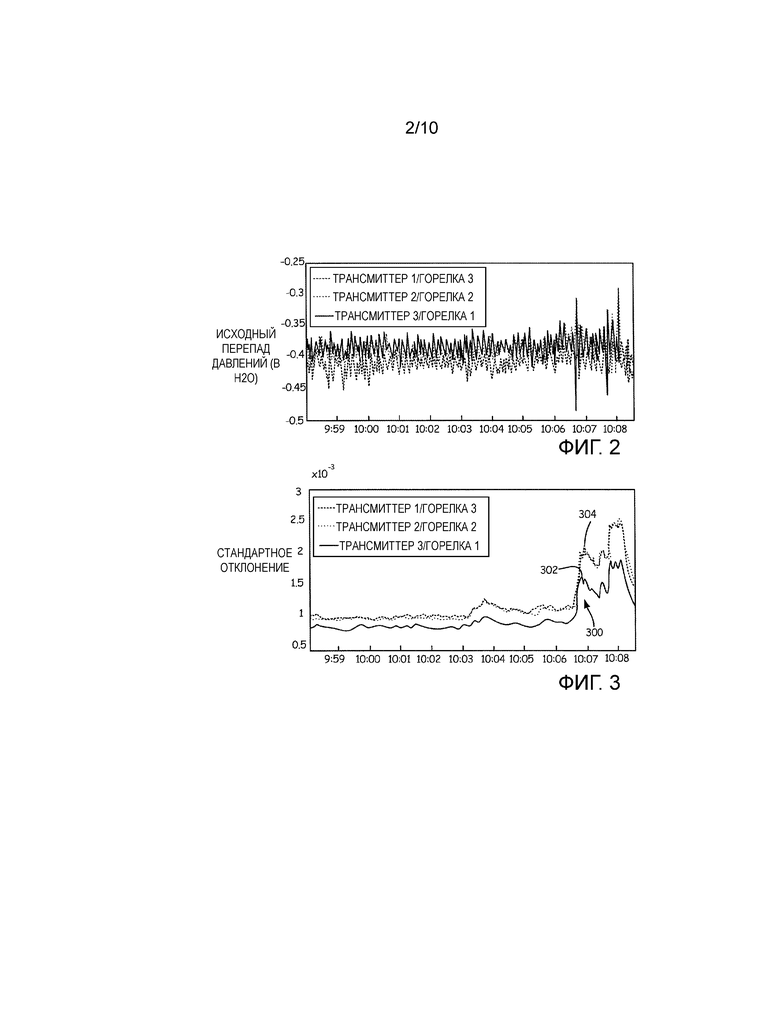
[0010] Фиг.2 представляет собой график исходных сигналов датчика перепада давлений, производимых тремя трансмиттерами.
[0011] Фиг.3 представляет собой график стандартных отклонений сигналов перепада давлений по фиг.2.
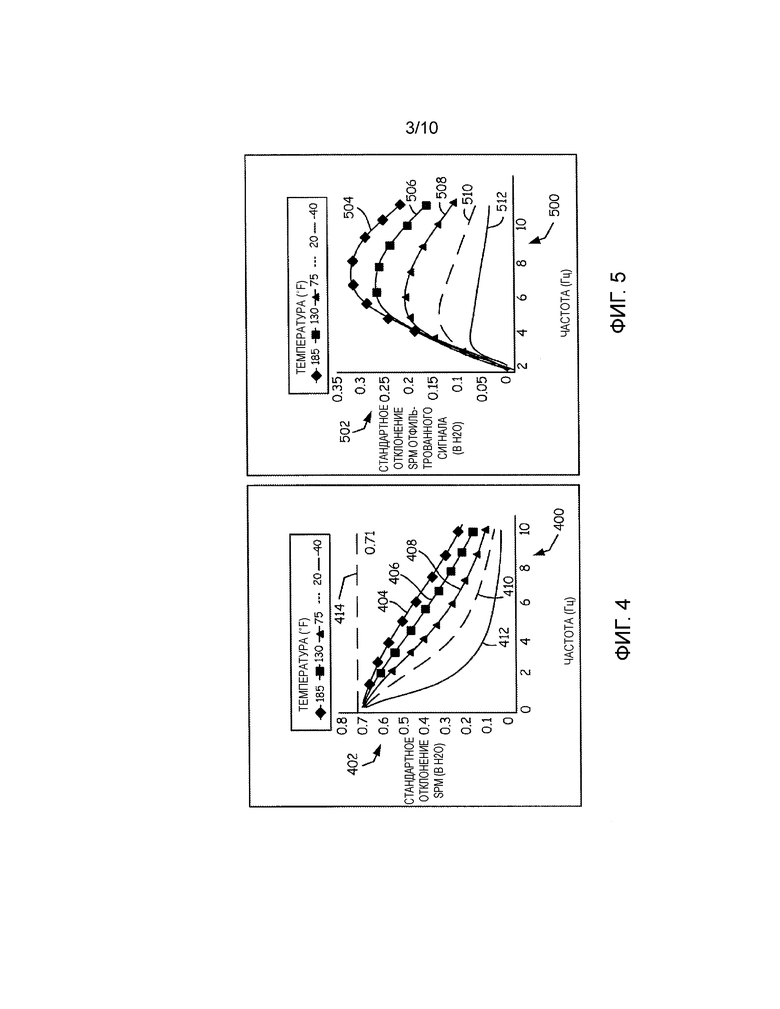
[0012] На фиг.4 приведены графики стандартного отклонения как функции частоты для различных температур датчика перепада давлений.
[0013] На фиг.5 приведены графики стандартного отклонения как функции частоты при различных температурах для сигналов перепада давлений, которые были отфильтрованы разностным фильтром верхних частот.
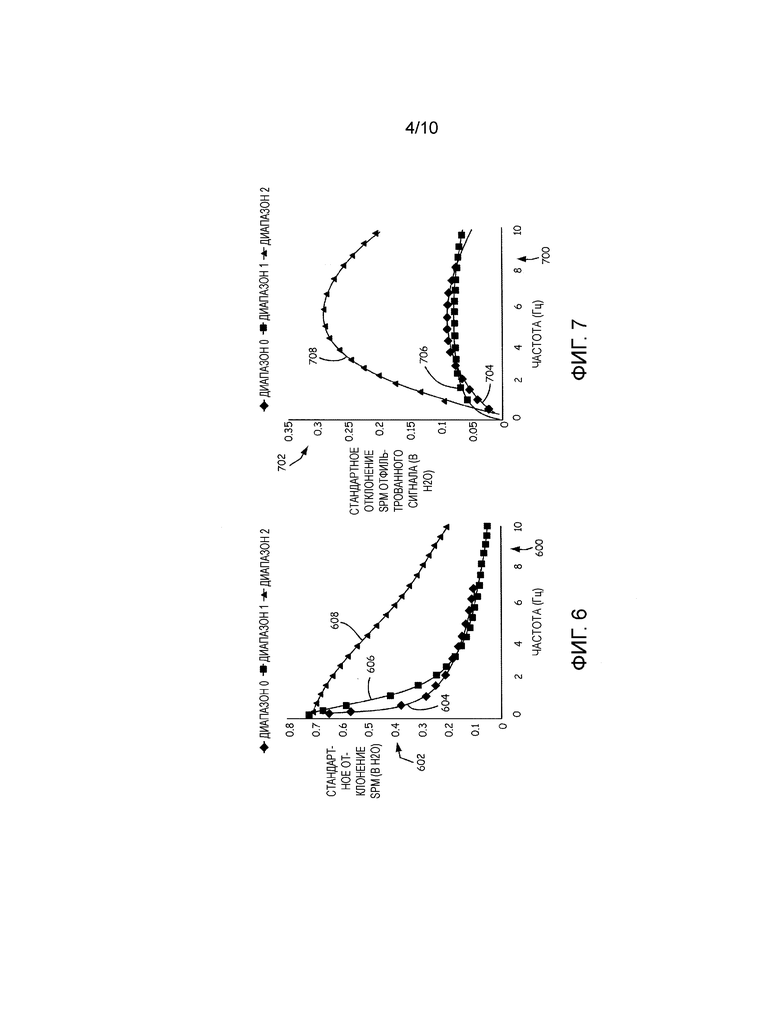
[0014] На фиг.6 приведены графики стандартного отклонения как функции частоты для набора рабочих диапазонов датчика перепада давлений.
[0015] На фиг.7 приведены графики стандартного отклонения как функции частоты для набора рабочих диапазонов сигнала датчика перепада давлений, отфильтрованного разностным фильтром верхних частот.
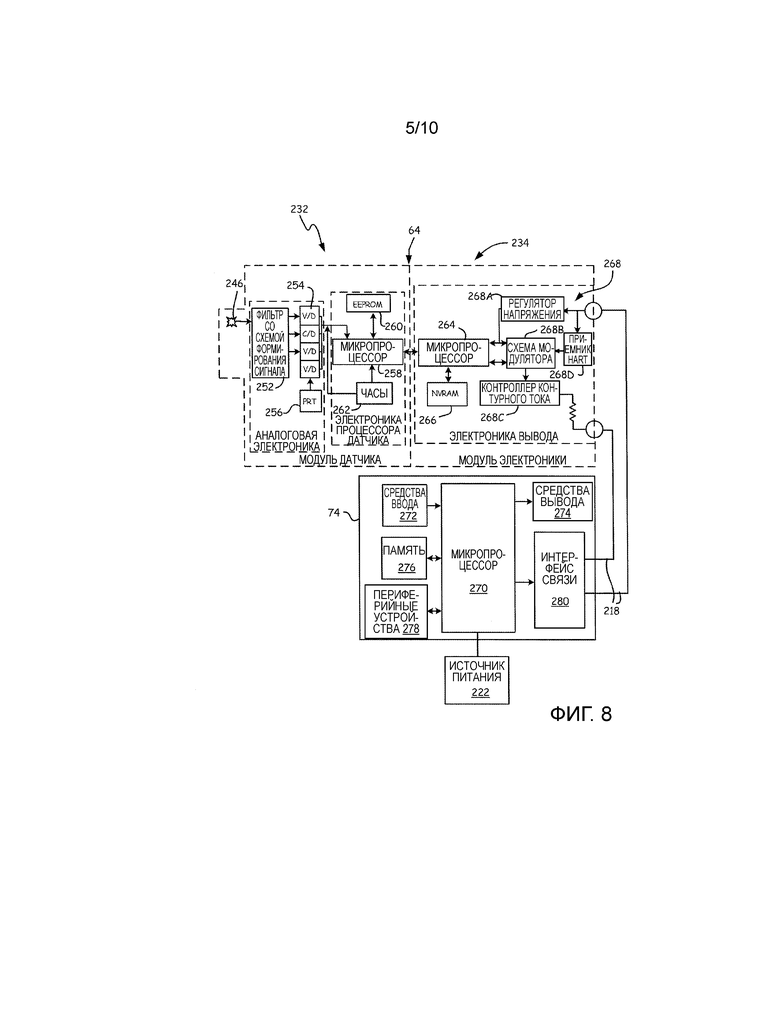
[0016] Фиг.8 представляет собой блок-схему элементов цепи в полевом устройстве и рабочей станции, используемых для реализации различных вариантов осуществления.
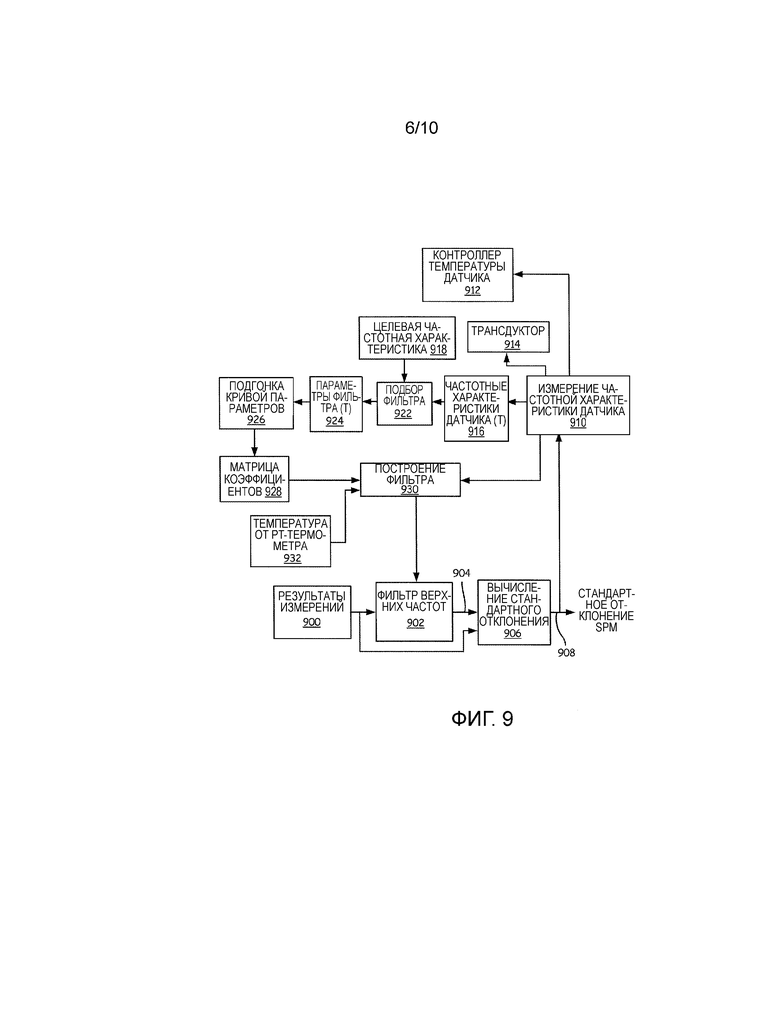
[0017] Фиг.9 представляет собой блок-схему элементов программного обеспечения, используемых для реализации различных вариантов осуществления.
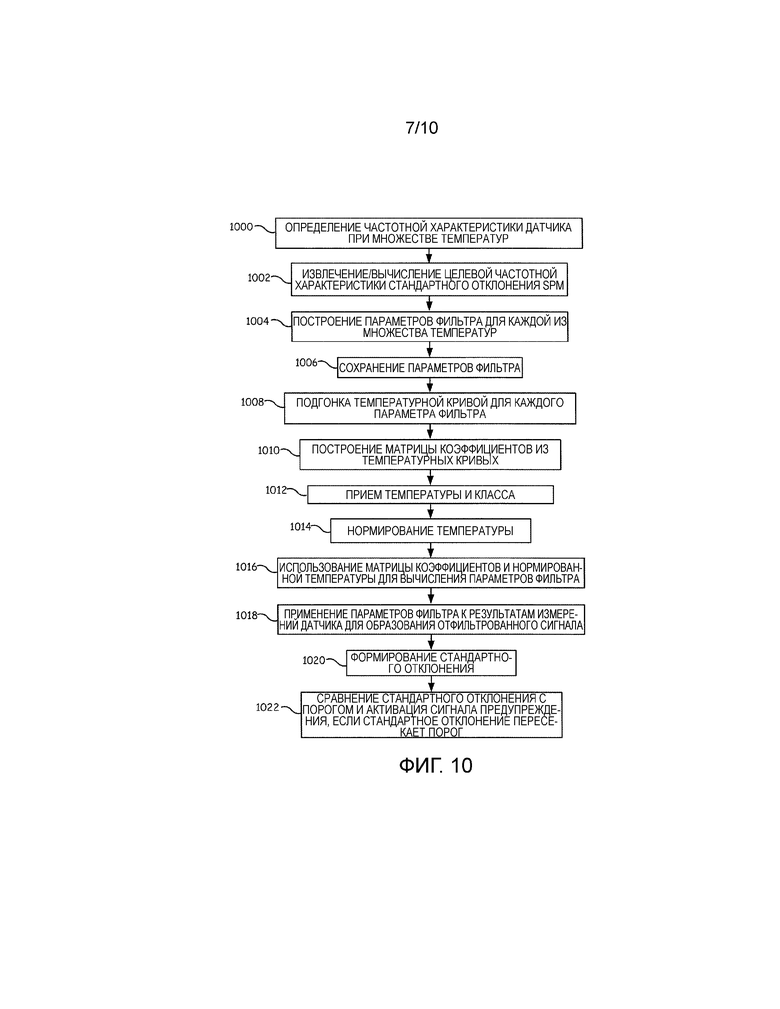
[0018] Фиг.10 представляет собой блок-схему способа построения и использования фильтра верхних частот.
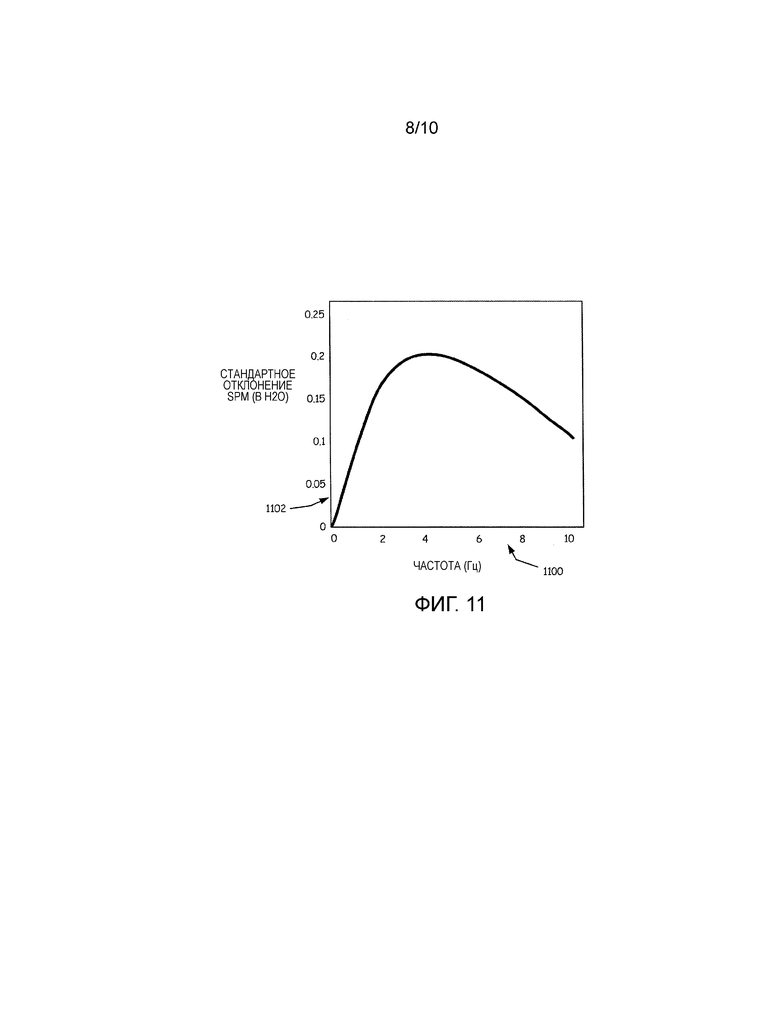
[0019] Фиг.11 представляет собой график целевой частотной характеристики стандартного отклонения сигнала перепада давлений.
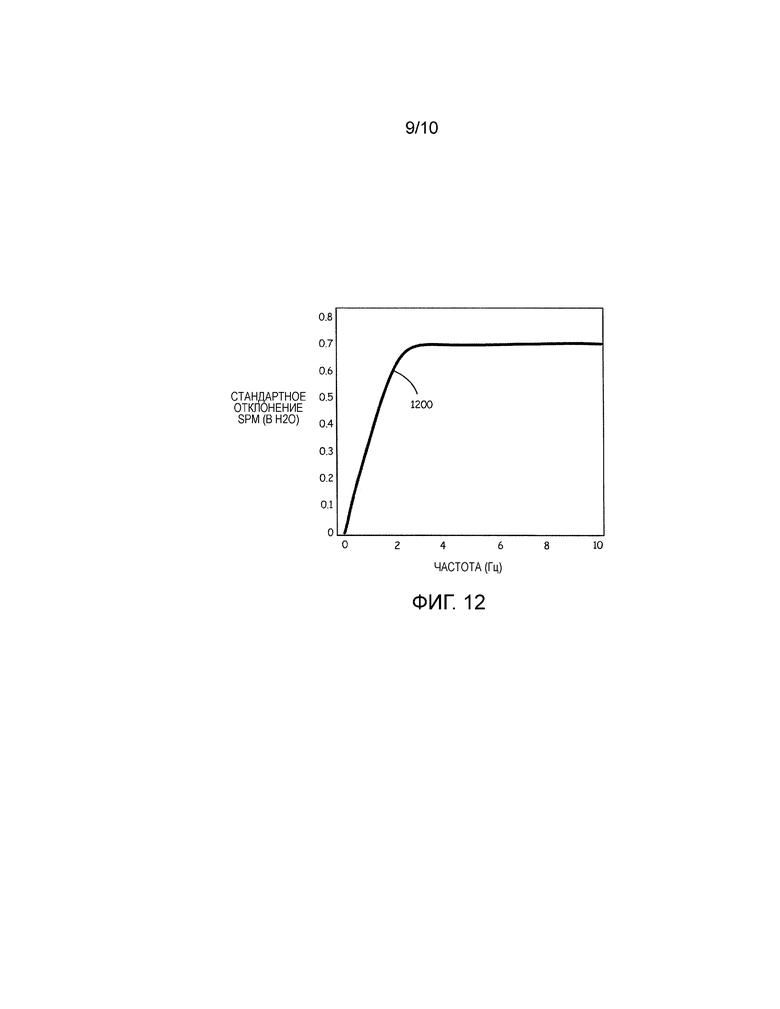
[0020] Фиг.12 представляет собой график второй целевой частотной характеристики стандартного отклонения сигнала перепада давлений.
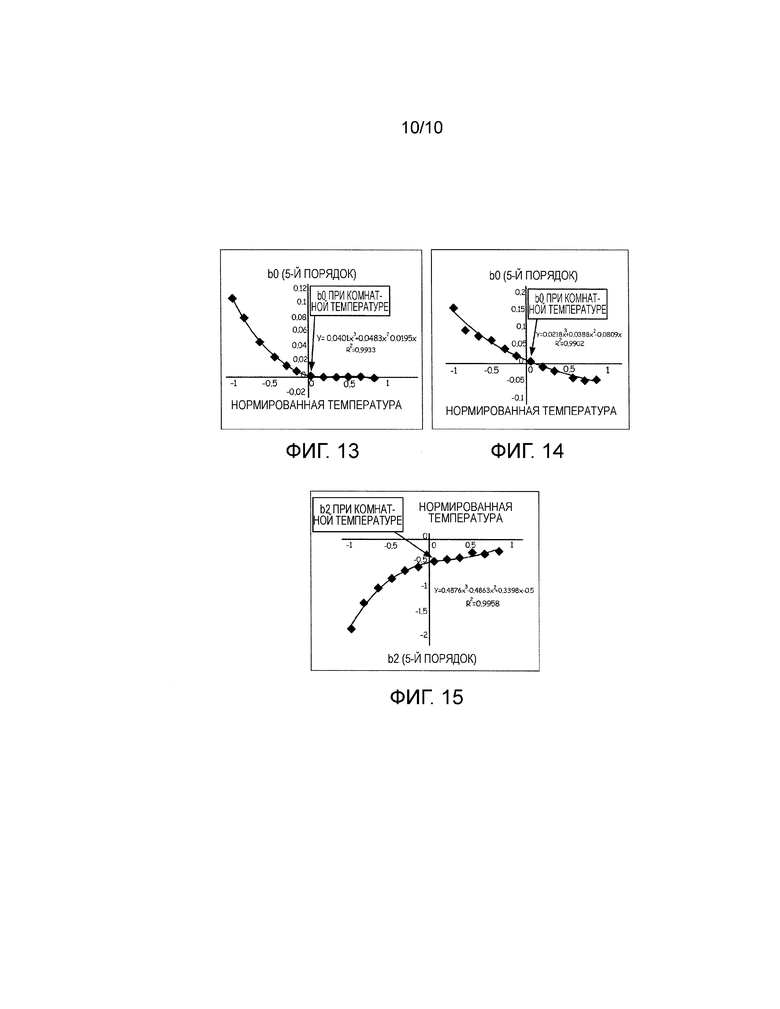
[0021] На фиг.13 приведен график параметра b0 фильтра как функции температуры.
[0022] На фиг.14 приведен график параметра b1 фильтра как функции температуры.
[0023] На фиг.15 приведен график параметра b2 фильтра как функции температуры.
Подробное описание иллюстративных вариантов осуществления
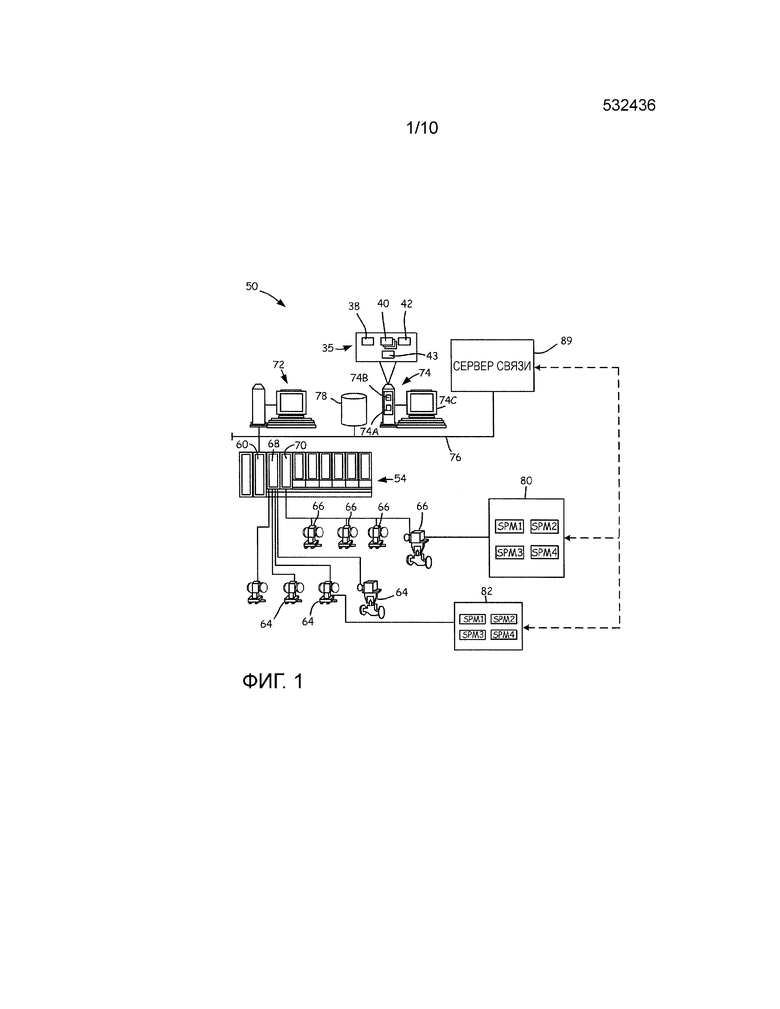
[0024] Фиг.1 иллюстрирует часть 50 технологической установки с целью описания одного способа, в котором сбор и обработка статистических данных, а в некоторых случаях и обнаружение аварийной ситуации могут быть выполнены компонентами, связанными с системой 35 предотвращения аварийных ситуаций. Система предотвращения аварийных ситуаций включает в себя приложение 38 сбора данных и конфигурации, приложение 40 наблюдения или интерфейса, которое может включать в себя блоки статистического сбора и обработки, а также приложение 42 развертывания обработчика правил и исполнения. Система 35 предотвращения аварийных ситуаций дополнительно хранит базу данных 43 статистического контроля процесса, которая хранит статистические данные, сгенерированные на основе различных параметров процесса.
[0025] Часть 50 технологической установки, показанная на фиг.1, включает в себя распределенную систему 54 управления процессом, имеющую один или более контроллеров 60 процесса, соединенных с одним или более полевыми устройствами 64 и 66 через платы ввода/вывода или устройства 68 и 70, которые могут быть любыми желаемыми типами устройств ввода/вывода, поддерживающих любой желаемый протокол связи или контроллера. Полевые устройства 64 показаны как полевые устройства HART, а полевые устройства 66 проиллюстрированы как полевые устройства Fieldbus, однако эти полевые устройства могут использовать и любые другие желаемые протоколы связи, а также осуществлять связь через проводную или беспроводную структуру связи, такую как, например, Ethernet, волоконно-оптическая система и WirelessHART®. Кроме того, полевые устройства 64 и 66 могут быть устройствами любого типа, такими как, например, датчики, клапаны, трансмиттеры, позиционеры и т.д., и могут поддерживать любой желаемый открытый, корпоративный или иной протокол связи или программируемый протокол, при этом подразумевается, что устройства 68 и 70 ввода/вывода должны быть совместимы с желаемым протоколом, используемыми полевыми устройствами 64 и 66.
[0026] В любом случае один или более пользовательских интерфейсов или компьютеров 72 и 74 (которые могут представлять собой любые типы персональных компьютеров, рабочих станций и т.д.), доступные производственному персоналу, такому как инженеры по конфигурированию, операторы управления технологическим процессом, обслуживающий персонал, менеджеры предприятий, инспекторы и т.д., соединены с контроллерами 60 процесса через линию или шину 76 связи, которая может быть реализована с использованием любой желаемой проводной или беспроводной структуры связи, а также с использованием любого желаемого или подходящего протокола связи, такого как, например, протокол Ethernet. Кроме того, к шине 76 связи также может быть подключена база данных 78 для функционирования в качестве архива данных, который собирает и хранит информацию о конфигурации, а также данные переменных онлайн процессов, данные параметров, данные состояния и другие данные, связанные с контроллерами процесса 60 и полевыми устройствами 64 и 66 в пределах технологической установки 10. Таким образом, база данных 78 может функционировать как база данных конфигурации для хранения текущей конфигурации, в том числе модулей конфигурации процесса, а также информации о конфигурации управления для системы 54 управления технологическим процессом, как загруженной и хранящейся в контроллерах 60 процесса и полевых устройствах 64 и 66. Аналогичным образом база данных 78 может хранить предысторию о предотвращении аварийных ситуаций, в том числе статистические данные, собранные и/или сгенерированные полевыми устройствами 64 и 66 в пределах технологической установки, или статистические данные, определенные на основе переменных процесса, собранных полевыми устройствами 64 и 66.
[0027] В то время как контроллеры процесса 60, устройства ввода/вывода 68 и 70, а также полевые устройства 64 и 66, как правило, расположены и распределены в порой жестких производственных условиях, рабочие станции 72 и 74 и база данных 78 обычно располагаются в помещениях управления, помещениях обслуживания или другой менее жесткой среде, легко доступной операторам, обслуживающему персоналу и т.д.
[0028] В общем случае контроллеры 60 процесса хранят и выполняют одно или более приложений контроллеров, которые реализуют стратегии управления с использованием ряда различных, независимо выполняемых модулей или блоков управления. Каждый из модулей управления может быть выполнен из того, что обычно называют функциональными блоками, причем каждый функциональный блок представляет собой часть или подпрограмму общей программы управления и работает совместно с другими функциональными блоками (через взаимодействие посредством связей) для реализации контуров управления технологическим процессом в пределах технологической установки. Как известно, функциональные блоки, которые могут быть объектами протокола объектно-ориентированного программирования, как правило, выполняют одну из входной функции, такой как связанной с трансмиттером, датчиком или другим устройством измерения параметров процесса, функции управления, такой как связанной с программой управления, которая осуществляет ПИД-регулирование, нечеткую логику или тому подобное управление, или выходной функции, которая управляет работой некоторого устройства, такого как клапан, для выполнения некоторой физической функции в пределах технологической установки. Конечно, существуют гибридные и комплексные функциональные блоки других типов, такие как контроллеры с прогнозирующими моделями (MPCs), оптимизаторы и т.д. Следует понимать, что хотя протокол Fieldbus и системный протокол DeltaV™ используют модули управления и функциональные блоки, разработанные и реализованные в протоколе объектно-ориентированного программирования, модули управления могут быть разработаны с использованием любой желаемой схемы программирования управления, включая, например, последовательные функциональные блоки, многоступенчатую логику и т.д., и не ограничиваться тем, чтобы быть выполненными с использованием функциональных блоков или любого другого конкретного метода программирования.
[0029] Как показано на фиг.1, обслуживающая рабочая станция 74 включает в себя процессор 74А, память 74В и устройство 74C отображения. Память 74В хранит приложения 38, 40 и 42 предотвращения аварийных ситуаций так, что эти приложения могут выполняться на процессоре 74А для предоставления информации пользователю через устройство 74С отображения (или любое другое устройство отображения, такое как принтер).
[0030] Кроме того, как показано на фиг.1, некоторые (и потенциально все) полевые устройства 64 и 66 включают в себя блоки 80 и 82 сбора и обработки данных. Хотя блоки 80 и 82 описываются со ссылкой на фиг.1 как блоки расширенной диагностики (ADBs), являющиеся известными функциональными блоками Foundation Fieldbus, которые могут быть добавлены к устройствам Fieldbus для сбора и обработки статистических данных внутри устройств Fieldbus, в целях этого обсуждения блоки 80 и 82 могут являться или могут включать в себя и любой другой тип блока или модуля, расположенного в пределах технологического устройства, который собирает данные устройства и вычисляет или определяет одну или более статистических характеристик или параметров для этих данных независимо от того, расположены ли эти блоки в устройствах Fieldbus или поддерживают протокол Fieldbus. В то время как блоки 80 и 82 по фиг.1 показаны как расположенные в одном из устройств 64 и в одном из устройств 66, эти или подобные блоки могут быть расположены и в любом числе полевых устройств 64 и 66, могут быть расположены в других устройствах, таких как контроллер 60, устройства 68, 70 ввода/вывода, в промежуточном устройстве, которое находится внутри установки и которое взаимодействует с множественными датчиками или трансмиттерами и с контроллером 60, или в рабочих станциях 72 или 74. Кроме того, блоки 80 и 82 могут находиться в любом подмножестве устройств 64 и 66.
[0031] В общем случае блоки 80 и 82 или подэлементы этих блоков осуществляют сбор данных, таких как данные переменных процесса, а также выполняют статистическую обработку или анализ этих данных. Например, блок 80 включает в себя набор из четырех единиц или блоков статистического контроля процесса (SPM) SPM1-SPM4, которые могут собирать данные переменных процесса или другие данные и выполнять одно или более статистических вычислений на основе собранных данных для определения, например, среднего значения, медианного значения, стандартного отклонения, среднеквадратичного значения (RMS), скорости изменения, диапазона, минимума, максимума и т.д. собранных данных и/или для обнаружения таких событий, как дрейф, напряжение смещения, шум, скачки и т.д. в собранных данных. Ни конкретные генерируемые статистические данные, ни способ, которым они генерируются, не имеют решающего значения. Таким образом, в дополнение или вместо конкретных типов, описанных выше, могут быть сгенерированы различные типы статистических данных. Кроме того, для генерации этих данных могут использоваться различные методы, в том числе известные методы. Термин блок статистического контроля процесса (SPM) используется здесь для описания функциональных возможностей, которые выполняют статистический контроль процесса по меньшей мере в отношении одной переменной процесса или другого параметра процесса, и может быть выполнен любым желаемым программным обеспечением, встроенным программным обеспечением или аппаратными средствами в пределах устройства или даже за пределами устройства, для которого собираются данные.
[0032] В качестве другого примера блок 82 на фиг. 1, который показан как связанный с трансмиттером 82, включает в себя набор из четырех единиц или блоков SPM, SPM1-SPM4, которые могут собирать данные переменных процесса или другие данные в трансмиттере и выполнять одно или более статистических вычислений на основе собранных данных для определения, например, среднего значения, медианного значения, стандартного отклонения и т.д. собранных данных. Несмотря на то что блоки 80 и 82 показаны как включающие в себя по четыре блока SPM, блоки 80 и 82 могут содержать и любое другое число блоков SPM для сбора данных и определения статистических характеристик, связанных с этими данными. В то время как обсуждаемые здесь блоки SPM могут быть известными блоками SPM Foundation Fieldbus, термин блок статистического контроля процесса (SPM) используется здесь для обозначения любого типа блока или элемента, который собирает данные, такие как данные переменных процесса, и выполняет некоторую статистическую обработку этих данных для определения статистической характеристики, такой как среднее значение, стандартное отклонение и т.д. Таким образом, данный термин предназначен для охвата программного обеспечения или встроенного программного обеспечения, или других элементов, которые выполняют эту функцию, независимо от того, имеют ли эти элементы вид функциональных блоков или блоков других типов, программ, подпрограмм или элементов и поддерживают ли эти элементы протокол Foundation Fieldbus или какой-либо другой протокол, например, PROFIBUS, WORLDFIP, Device-Net, AS-Interface, HART, CAN и т.д.
[0033] Параметры блоков SPM в полевых устройствах могут быть сделаны доступными для внешнего клиента, такого как рабочая станция 74, посредством шины или сети 76 связи и контроллера 60. Дополнительно или в качестве альтернативы параметры и другая информация, собранная или сгенерированная блоками SPM в блоках 80 и 82, может быть сделана доступной для рабочей станции 74, например, через сервер 89 связи. Это соединение может быть беспроводным соединением, проводным соединением, временным подключением (таким, которое использует одно или более мобильных устройств) или любым другим желаемым связным соединением, использующим любой желаемый или надлежащий протокол связи. Конечно, любое из связных соединений, описанных в данном документе, может использовать сервер связи для объединения данных, получаемых от различных типов устройств, в общем или согласованном формате.
[0034] В современных средствах на основе SPM сигналы предупреждения устанавливаются путем задания пороговых значений для различных параметров SPM, таких как медианное/среднее значение и стандартное отклонение. Известно, что полевые устройства, установленные для работы в различных диапазонах измерений, должны использовать различные пороги для своих пределов оповещения. В общем случае датчики, которые работают в диапазонах, используемых для обнаружения меньших изменений в значениях переменной процесса, должны иметь меньшие пределы оповещения, чем датчики, работающие в больших диапазонах.
[0035] дополнительно авторы настоящего изобретения обнаружили, что для использования преимущества SPM в полной мере необходимо свести к минимуму влияния температуры и диапазона трансмиттера, изменчивости производственного процесса и влияния температуры импульсной линии. Это обеспечивало бы более воспроизводимые результаты измерений и лучшие сигналы предупреждения SPM в различных условиях эксплуатации.
[0036] На фиг.2 показан пример исходного сигнала датчика перепада давлений для трех отдельных трансмиттеров. Фиг.3 показывает стандартное отклонение для каждого из сигналов датчика перепада давлений по фиг.2. Как показано на фиг.3, вариация стандартного отклонения между трансмиттером 3 и трансмиттерами 1 и 2 существенна в точке 300 неустойчивости пламени, где трансмиттер 3 имеет значительно более низкий пик 302 стандартного отклонения, чем пик 304 для трансмиттеров 1 и 2. Таким образом, фиг.3 показывает, что между трансмиттерами, работающими в одном и том же диапазоне и при одной и той же температуре, имеется вариация в стандартном отклонении.
[0037] Значения стандартного отклонения также зависят от частоты изменения параметров процесса внутри трубопровода или резервуара. При более высоких частотах датчики не способны реагировать достаточно быстро для того, чтобы почувствовать изменения переменной процесса, и в результате стандартное отклонение сигнала процесса при более высоких частотах имеет тенденцию к падению. Другими словами, стандартное отклонение имеет непостоянную частотную характеристику. Кроме того, частотная характеристика стандартного отклонения изменяется с температурой датчика. В общем случае датчики реагируют более медленно, когда они холоднее, что приводит к снижению стандартного отклонения при более низких температурах во всех частотах.
[0038] На фиг.4 приведен график частотной характеристики стандартного отклонения датчика перепада давлений для набора температур. Частота на фиг.4 показана вдоль горизонтальной оси 400, а стандартное отклонение перепада давлений - вдоль вертикальной оси 402. Кривые 404, 406, 408, 410 и 412 частотных характеристик представляют собой частотные характеристики стандартного отклонения для датчика перепада давлений при 185°F, 130°F, 75°F, 20°F и -40°F соответственно. Фиг.4 также показывает идеальное стандартное отклонение 414, которое представляет собой стандартное отклонение синусоиды амплитуды 1. Это идеальное стандартное отклонение имеет значение 0,71 для всех частот и температур.
[0039] Частотная характеристика стандартного отклонения, производимая датчиками, не является желательной, поскольку она имеет существенное значение при 0 Гц. Это приводит к тому, что при непосредственном использовании частотной характеристики стандартного отклонения ступенчатые изменения в процессе будут инициировать сигналы предупреждения, поскольку стандартное отклонение будет сильно реагировать на такие ступенчатые изменения. Чтобы избежать этого, в данной области техники перед вычислением стандартного отклонения к сигналу датчика применяется фильтр верхних частот с тем, чтобы частотная характеристика стандартного отклонения при 0 Гц принимала значение 0.
[0040] На фиг.5 приведены графики стандартных отклонений отфильтрованных сигналов датчика при различных температурах. Частота на фиг.5 показана вдоль горизонтальной оси 500, а стандартные отклонения показаний, с отфильтрованными верхними частотами, показаны вдоль вертикальной оси 502. На фиг.5 графики 504, 506, 508, 510 и 512 представляют собой частотные характеристики стандартного отклонения отфильтрованного сигнала для датчика, работающего при 185, 130, 75, 20 и -40 градусах по Фаренгейту соответственно. Как видно из фиг.5, даже после применения фильтра верхних частот частотная характеристика стандартного отклонения значительно варьируется в зависимости от температуры датчика. Вследствие чего представляется трудным устанавливать сигналы оповещения для стандартного отклонения в той среде, где температура датчика может изменяться или где подобные датчики используются в технологических установках при различных рабочих температурах.
[0041] На фиг.6 и 7 показаны изменения в частотной характеристике стандартного отклонения сигнала датчика перепада давлений из-за изменений рабочего диапазона датчика перепада давлений. Частота на фиг.6 показана вдоль горизонтальной оси 600, а стандартное отклонение - вдоль вертикальной оси 602. Графики 604, 606 и 608 представляют собой частотные характеристики стандартного отклонения для датчика, работающего в диапазоне 0, диапазоне 1 и диапазоне 2 соответственно. Как видно из фиг.6, датчики перепада давлений имеют существенно различные частотные характеристики стандартного отклонения при работе в разных диапазонах. На фиг.7 приводятся графики частотных характеристик по фиг.6, когда сигнала отфильтровывается разностным фильтром верхних частот до определения стандартного отклонения. Частота на фиг.7 показана вдоль горизонтальной оси 700, а значения стандартного отклонения показаны вдоль вертикальной оси 702. Графики 704, 706 и 708 представляют собой частотные характеристики стандартного отклонения отфильтрованных сигналов, производимых датчиками, работающими в диапазоне 0, диапазоне 1 и диапазоне 2 соответственно. Как видно из фиг.7, частотные характеристики стандартного отклонения отфильтрованных сигналов также существенно различаются для датчиков перепада давлений, работающих в различных диапазонах.
[0042] Описываемые здесь варианты осуществления обеспечивают динамический фильтр верхних частот, предназначенный для нормализации частотной характеристики стандартного отклонения с целью исключения вариаций из-за температуры, диапазона датчика и изменчивостью при изготовлении. При нормализации частотной характеристики стандартного отклонения, описываемые здесь варианты осуществления позволяют установить общие пороги предупреждения для стандартного отклонения для датчиков, работающих при различных температурах, в различных диапазонах, а также для датчиков, изготовленных различными способами.
[0043] В соответствии с одним из вариантов осуществления изобретения фиг.8 иллюстрирует принципиальную схему устройства 64 и рабочей станции 74 по фиг.1. Устройство 64 показано включающим в себя модуль 232 датчика и модуль 234 электрической схемы. Модуль 232 датчика включает в себя датчик 246, аналоговую электронику и электронику процессора датчика. Модуль 234 электрической схемы устройства включает в себя электронику вывода. Аналоговая электроника в модуле 232 датчика включает в себя схему 252 формирования сигнала, схему 254 преобразователей и платиновый термометр 256 сопротивления (PRT). Электроника процессора датчика включает в себя микропроцессор 258 датчика, память 260 и часы 262. Электроника вывода включает в себя микропроцессор 264 вывода, память 266 и схему 268 связи. Рабочая станция 74 включает в себя микропроцессор 270, средства ввода 272, средства вывода 274, память 276, периферийные устройства 278 и интерфейс 280 связи. Источник питания 222 обеспечивает питание рабочей станции 74, а также устройству 64 через рабочую станцию 74.
[0044] В данном варианте осуществления датчик 246 измеряет некоторую переменную процесса, такую как статическое давление, перепад давлений, температуру и, например, положение клапана. Несмотря на то что для простоты показан только единственный датчик, устройство 64 может иметь множественные различные датчики. Аналоговый выходной сигнал от датчика 246 передается на схему 252 формирования сигнала, которая усиливает и формирует (например, фильтрует) сигналы. Схема 254 преобразователей преобразует аналоговые сигналы, генерируемые датчиком 246, в цифровые сигналы, пригодные для использования микропроцессором 258. Как показано на фиг.8, схема преобразователей включает в себя как преобразователи напряжение-цифровой код (V/D), так и преобразователи емкость-цифровой код (C/D). PRT 256 обеспечивает температурный сигнал, характеризующий температуру вблизи датчика 246, в схему 254 преобразователей, так что сигналы датчика могут быть скомпенсированы для температурных вариаций. Микропроцессор 258 принимает сформированные и оцифрованные сигналы датчика от схемы 254 преобразователей, включая оцифрованный температурный сигнал от PRT 256. Микропроцессор 258 компенсирует и линеаризует сигналы датчика для устранения систематических ошибок датчика и нелинейности с использованием констант коррекции, хранящихся в памяти 260. Часы 262 обеспечивают микропроцессор 258 тактовыми (синхронизирующими) сигналами. Оцифрованные, скомпенсированные и скорректированные сигналы датчика затем передаются микропроцессору 264.
[0045] Микропроцессор 264 анализирует сигналы датчика для определения режима процесса. В частности, память 266 (которая может быть энергонезависимым оперативным запоминающим устройством (NVRAM)) содержит таблицы соответствий, в которых хранятся коэффициенты алгоритма, используемые для определения конкретных значений режима процесса, такие как массовый расход, на основе величин измеренных переменных процесса. Кроме того, аппаратные параметры и параметры технологической жидкой среды, такие как тип и внутренний диаметр трубы, несущей технологическую жидкую среду, а также вязкость и плотность технологической жидкой среды, загружаются в память 266 через контур 218 управления. В других вариантах осуществления данные, относящиеся к аппаратным параметрам и параметрам жидкой среды, непосредственно вводятся в трансмиттер 264 через пользовательский интерфейс (не показан на фиг.8). Кроме того, параметры технологической жидкой среды могут быть функцией переменных процесса, так что различные параметры технологической жидкой среды хранятся в таблицах соответствий и выбираются на основе других параметров жидкой среды и измеренных переменных процесса.
[0046] Используя аппаратные параметры, параметры технологической жидкой среды, измеренные переменные процесса и коэффициенты алгоритма, микропроцессор 264 выполняет динамическое вычисление. Динамическое вычисление оценивает уравнение режима процесса для определения режима процесса или состояния текучей среды, например, массового расхода. Сигнал режима процесса, представляющий вычисленный режим процесса, и сигналы датчика передаются на рабочую станцию 74 через контур 218 управления с использованием схемы 268 связи. Схема 268 связи включает в себя регулятор 268A напряжения, схему 268B модулятора, контроллер 268C контурного тока и приемник протокола, такой как приемник 4-20 мА HART® или трансивер 268D, чтобы позволить модулю схемы 234 трансмиттера связываться с интерфейсом 280 связи рабочей станции 74.
[0047] NVRAM 266 также содержит команды для статистического контроля процесса (SPM). Эти команды выполняются параллельно с командами, используемыми для генерации состояния процесса. Команды SPM вычисляют статистические значения из сигналов датчика, такие как среднее/медианное значение, стандартное отклонение и т.д. одного или более сигналов датчика. В частности, и как подробно описано ниже, команды SPM предписывают микропроцессору 264 выполнять этапы, на которых динамически строится фильтр верхних частот для обеспечения желаемой частотной характеристики статистических значений, созданных SPM. В соответствии с некоторыми вариантами осуществления построенный фильтр верхних частот компенсирует изменения температуры на датчике, изменения в частотной характеристике датчика из-за установки диапазона датчика и изменчивости при изготовлении датчика.
[0048] В соответствии с некоторыми вариантами осуществления NVRAM 266 также содержит пороги предупреждения, а микропроцессор 264 способен определить, когда статистическое значение пересекает порог, и когда это происходит, микропроцессор передает сигнал предупреждения вместе с временной отметкой рабочей станции 74 с помощью схемы 268 связи.
[0049] В качестве альтернативы или дополнительно статистические значения, полученные микропроцессором 264, посылаются на рабочую станцию 74 через схему 268 связи. Рабочая станция 74 может хранить статистические значения в памяти 276 и может отображать исторические статистические значения на выходном мониторе 274. Микропроцессор 270 рабочей станции 74 может сравнивать статистические значения с пороговыми значениями, хранящимися в памяти 276, и может выдавать предупреждение, когда статистическое значение пересекает порог. Следует отметить, что порог может быть пересечен выше или ниже заданного порогового значения.
[0050] Рабочая станция 74 обычно содержит персональный компьютер, такой как портативный компьютер, установленный рядом с производственным процессом, чтобы контролировать и регулировать переменные и режимы технологического процесса. Рабочая станция 74 включает в себя средства ввода 272, такие как клавиатура, мышь или другой пользовательский интерфейс, который позволяет операторам вводить входные параметры управления процессом в память 276. Рабочая станция 74 также включает в себя средства вывода 274, такие как монитор, которые позволяют извлекать данные из рабочей станции 74. Периферийные устройства 278, такие как принтер или другие широко применяемые устройства, также могут быть подключены к рабочей станции 74 для ввода и извлечения данных из микропроцессора 270. Рабочая станция 74 включает в себя интерфейс 280 связи, который передает данные на и получает данные от микропроцессора 264. Рабочая станция 74 выполнена с возможностью обеспечения полной оценки и анализа характеристик модуля 234 и сигналов датчика, генерируемых датчиком 246.
[0051] На фиг.9 представлена блок-схема элементов программного обеспечения, выполняемая микропроцессором 264 для вычисления стандартного отклонения и для динамического построения и использования фильтра верхних частот, нормализующего стандартное отклонение. На фиг.9 результаты 900 измерения датчика, представляющие собой серию или последовательность цифровых показаний датчика, предоставляемых микропроцессором 258 по фиг.8, принимаются микропроцессором 264 и передаются в фильтр 902 верхних частот для получения отфильтрованных показаний 904 датчика. Отфильтрованные показания 904 датчика передаются блоку 906 вычисления стандартного отклонения для получения стандартного отклонения 908 SPM.
[0052] На фиг.10 представлена блок-схема способа для динамического построения фильтра верхних частот 902 таким образом, что частотная характеристика стандартного отклонения 908 соответствует целевой или желаемой частотной характеристике. На этапе 1000 блок 910 измерения частотной характеристики датчика определяет частотную характеристику датчика при множестве температур. Для этого блок 910 измерения частотной характеристики датчика сначала устанавливает температуру датчика с помощью контроллера 912 температуры датчика. В различных вариантах осуществления контроллер 912 температуры датчика способен регулировать температуру датчика. В соответствии с одним из вариантов осуществления контроллер 912 температуры датчика может устанавливать температуру датчика на пять различных значений: 185°F, 130°F, 75°F, 20°F и -40°F. Блок 910 измерения частотной характеристики датчика предписывает контроллеру 912 температуры датчика устанавливать температуру датчика на одну из множества температур. Блок 910 измерения частотной характеристики затем активирует трансдуктор 914, который вызывает синусоидальные колебания в характеристике текучей среды, измеряемые датчиком, такой как, например, давление или уровень текучей среды. В частности, блок 910 предписывает трансдуктору 914 создавать синусоидальные колебания определенной частоты. Сигнал датчика, производимый в ответ на входной сигнал, обеспечиваемый трансдуктором 914, затем предоставляется в качестве результатов измерений 900, которые обходят фильтр 902 верхних частот, не будучи отфильтрованными. Неотфильтрованные показания датчика предоставляются блоку 906 вычисления стандартного отклонения, который вычисляет стандартное отклонение неотфильтрованных результатов измерений датчика. Стандартное отклонение неотфильтрованных результатов измерений датчика затем предоставляются блоку 910 измерения частотной характеристики датчика. Блок 910 измерения частотной характеристики сохраняет значение стандартного отклонения для частоты синусоидального колебания, введенного трансдуктором 914, в виде части частотной характеристики 916 датчика.
[0053] Блок 910 измерения частотной характеристики затем предписывает трансдуктору 914 изменить частоту колебания текучей среды, и результирующие результаты измерения датчика снова преобразуются в стандартное отклонение. Это новое значение стандартного отклонения затем сохраняется блоком 910 измерения частотной характеристики. Таким образом, блок 910 измерения частотной характеристики способен определить значения стандартного отклонения для множества частот и, следовательно, получить частотную характеристику стандартного отклонения датчика при заданной температуре. Когда при выбранной температуре частотная характеристика полностью определена, блок 910 измерения частотной характеристики предписывает контроллеру 912 температуры датчика изменить температуру датчика на новое значение температуры. При новом значении температуры блок 910 измерения частотной характеристики снова предписывает трансдуктору 914 вызывать колебания текучей среды на различных частотах для получения частотной характеристики стандартного отклонения при новой температуре. При повторении этих этапов для каждой температуры, блок 910 измерения частотной характеристики дает частотные характеристики 916 датчика, которые включают в себя частотные характеристики датчика при каждой выбранной температуре.
[0054] На этапе 1002 извлекается или вычисляется микропроцессором 264 целевая частотная характеристика 918 стандартного отклонения. В соответствии с одним вариантом осуществления целевая частотная характеристика является частотной характеристикой стандартного отклонения отфильтрованного сигнала датчика, производимого модельным датчиком, работающим при выбранной температуре и в том же диапазоне, что и датчик в полевом устройстве, сигналы которого отфильтрованы разностным фильтром верхних частот. Пример такой целевой частотной характеристики показан на фиг.11, где частота показана вдоль горизонтальной оси 1100, а стандартное отклонение отфильтрованного сигнала датчика, производимого модельным датчиком при выбранной температуре, показано на вертикальной оси 1102. В соответствии с одним вариантом осуществления выбранная температура является комнатной температурой. При построении фильтра таким образом, что частотная характеристика стандартного отклонения согласовывается с целевой частотной характеристикой по фиг.11, можно фильтровать результаты измерения датчика, взятые при различных температурах с тем, чтобы нормализовать частотную характеристику стандартного отклонения по температурам. Это достигается путем динамического изменения фильтра с изменениями температуры таким образом, что независимо от температуры датчика достигается одна и та же частотная характеристика стандартного отклонения.
[0055] В других вариантах осуществления целевая частотная характеристика является частотной характеристикой стандартного отклонения отфильтрованного сигнала датчика, производимого модельным датчиком, работающим при выбранной температуре и в выбранном диапазоне, независимо от диапазона настоящего датчика, сигналы которого отфильтрованы разностным фильтром верхних частот. Поскольку модельный датчик работает в выбранном диапазоне, диапазон модельного датчика будет временами отличаться от диапазона датчика в полевом устройстве. При выборе целевой частотной характеристики, полученной с помощью модельного датчика, работающего при выбранной температуре и в выбранном диапазоне, независимо от диапазона датчика в полевом устройстве, частотная характеристика стандартного отклонения может быть нормализована так, что вариации из-за температуры и рабочего диапазона датчика в устройстве будут устранены.
[0056] В дополнительных вариантах осуществления целевая частотная характеристика может быть частотной характеристикой стандартного отклонения, образованной комбинацией модельного датчика с постоянной частотной характеристикой и модельного фильтра верхних частот, такого как разностный фильтр верхних частот. На фиг.12 представлен график целевой частотной характеристики 1200, полученной комбинацией модельного датчика с постоянной частотной характеристикой при всех рабочих температурах и разностного фильтра верхних частот. При использовании целевой частотной характеристики по фиг.12, нормализуются вариации частотной характеристики датчика из-за температуры и рабочего диапазона.
[0057] На этапе 1004 блок 922 подбора фильтра 922 строит параметры 924 фильтра для фильтра верхних частот, построенного из целевой частотной характеристики и частотной характеристики датчика при каждой температуре. Таким образом, блок 922 подбора фильтра строит отдельный фильтр верхних частот для каждой температуры.
[0058] Блок подбора 922 фильтра строит фильтр, генерируя частотную характеристику для фильтра как:
Уравнение 1
Где D(ω) представляет собой целевую частотную характеристику стандартного отклонения, A(ω,T) представляет собой частотную характеристику датчика при температуре T, а H(ω,T) является частотной характеристикой для фильтра, построенного при температуре T.
[0059] Как только частотная характеристика для фильтра определена с помощью вышеприведенного уравнения 1, определяют параметры фильтра верхних частот для реализации этой частотной характеристики для фильтра. В соответствии с одним из вариантов осуществления фильтр верхних частот строится в виде фильтра с конечной импульсной характеристикой (КИХ), который принимает следующий вид:
Уравнение 2
Где N - это порядок фильтра, а b0, b1, b2,... bN являются коэффициентами фильтра.
[0060] В классе КИХ-фильтров существует ряд фильтров, известных как фильтры с обобщенной линейной фазой (GLP). Линейная фазовая характеристика часто является желаемым свойством цифровых фильтров, поскольку она уменьшает количество искажений, например, в звуковых сигналах. Существуют четыре типа GLP фильтров. GLP фильтр 4-го типа обычно хорошо подходит для диагностики, поскольку он имеет строго 0-ую характеристику при постоянном токе (0 Гц), но может давать любую произвольную характеристику на частоте Найквиста, равной половине частоты дискретизации. GLP фильтр 4-го типа требует нечетного порядка N, что приводит к четному числу коэффициентов фильтра. GLP фильтр 4-го типа также обладает свойством антисимметрии коэффициентов, означая, что bi=-bN-i. Разностный фильтр верхних частот  на самом деле является весьма простым GLP фильтром 4-го типа с порядком N=1. Используя эвристический подход, авторы настоящего изобретения обнаружили, что GLP фильтр 4-го типа 5-го порядка обеспечивает кривую, которая достаточно хорошо ложится на частотную характеристику стандартного отклонения, вычисленную с помощью уравнения 1 при каждой из различных температур.
на самом деле является весьма простым GLP фильтром 4-го типа с порядком N=1. Используя эвристический подход, авторы настоящего изобретения обнаружили, что GLP фильтр 4-го типа 5-го порядка обеспечивает кривую, которая достаточно хорошо ложится на частотную характеристику стандартного отклонения, вычисленную с помощью уравнения 1 при каждой из различных температур.
[0061] GLP фильтр 4-го типа 5-го порядка выражается следующим образом:

Уравнение 3
Где yk является выходным сигналом фильтра при xk, xk-1, xk-2, xk-3, xk-4 и xk-5, которые представляют собой значения результатов xk, xk-1, xk-2, xk-3, xk-4 и xk-5 измерений датчика соответственно, а b0, b1 и b2 являются параметрами фильтра верхних частот. Отметим, что несмотря на наличие 6 операций умножения в уравнении 3, независимых коэффициентов в них только три - b0, b1 и b2. Таким образом, при построении фильтра для получения частотной характеристики стандартного отклонения, вычисленной по уравнению 1, блоку 922 подбора фильтра необходимо определить лишь значения b0, b1 и b2.
[0062] Для идентификации значений, которые будут соответствовать фильтру, вычисленному с помощью уравнения 1, наилучшим образом, может быть использован любой известный численный алгоритм проектирования цифрового фильтра, такой как Window Design, Frequency Sampling (метод частотной выборки), Weighted Least Squares (метод взвешенных наименьших квадратов), Equiripple, Remez Exchange и, например, Parks-McClellan.
[0063] Значения b0, b1 и b2, определяемые на этапе 1004, сохраняются в качестве параметров фильтра 924 на этапе 1006 для каждой температуры.
[0064] На фиг.13, 14 и 15 приведены графики значений b0, b1 и b2, необходимых для достижения желаемой частотной характеристики стандартного отклонения при различных температурах. На фиг.13, 14 и 15 вдоль горизонтальной оси показана нормированная температура, изменяющая от -1 до 1, где нормированное значение температуры вычисляется как:
Уравнение 4
[0065] Вертикальные оси на фиг.13, 14 и 15 представляют значения параметров. При комнатной температуре b0 и b1 устанавливаются на 0, а b2 устанавливается на -0,5. Это достигается за счет сдвига всех значений параметров на определенную величину, для того чтобы при комнатной температуре b0, b1 и b2 имели такие значения. При обеспечении b0=0, b1=0 и b2=-0,5 описанные здесь варианты осуществления гарантируют, что при комнатной температуре фильтр верхних частот будет работать как разностный фильтр.
[0066] На этапе 1008 с помощью подгонки кривой 926 параметров подгоняют кривую под значения параметров, указанные на фиг.13, 14 и 15. В соответствии с одним вариантом осуществления кривая третьего порядка как функция нормированной температуры подгоняется для каждого набора значений параметров в соответствии со следующей формулой:

Уравнение 5
Где t представляет собой нормированную температуру, ai,0, ai,1, ai,2, ai,3 являются коэффициентами для параметрических кривых фильтра, а bi является параметром фильтра.
[0067] На этапе 1010 из температурных кривых строится матрица коэффициентов для получения матрицы 928 коэффициентов. Пример такой матрицы коэффициентов имеет вид:
Уравнение 6
[0068] Отметим, что матрица коэффициентов не является необходимой, но помогает в понимании и вычислении параметров фильтра.
[0069] После того как матрица коэффициентов построена, полевое устройство готово к динамическому построению термозависимых фильтров верхних частот для достижения целевой частотной характеристики, выбранной на этапе 1002 для любой температуры датчика. На этапе 1012 значение 932 температуры, представляющее температуру датчика, измеренную с помощью PRT 256, предоставляется блоку 930 построения фильтра. На этапе 1014 блок 930 построения фильтра использует уравнение 4 для определения нормированной температуры. На этапе 1016 блок 930 построения фильтра использует матрицу 928 коэффициентов и нормированную температуру для вычисления значений параметров b0, b1 и b2 фильтра. В частности, матрица коэффициентов по уравнению 6 умножается на матрицу температуры вида:

Уравнение 7
Где T является матрицей температуры, а t - нормированной температурой.
[0070] На этапе 1018 параметры фильтра сохраняются в качестве фильтра 902 верхних частот и применяются к результатам измерений 900, которые могут храниться в NVRAM 266 или могут быть обработаны по мере их получения процессором 264 от процессора 258. Результаты измерения 900 содержат серию показаний датчика, которые вместе представляют собой сигнал датчика. Выходной сигнал фильтра 902 верхних частот представляет собой отфильтрованный сигнал 904, который передается блоку 906 вычисления стандартного отклонения на этапе 1020 для образования стандартного отклонения 908 с целевой частотной характеристикой. На этапе 1022 стандартное отклонение сравнивается с порогами оповещения и, если стандартное отклонение пересекает порог оповещения, активируется сигнал оповещения.
[0071] Несмотря на то что выше выполнена ссылка на стандартное отклонение, вместо стандартного отклонения также могут быть использованы и другие статистические показатели, такие как минимум и максимум.
[0072] Несмотря на то что выше речь шла об использовании температуры датчика, в других вариантах осуществления вместо температуры датчика может быть использована температура различных частей системы. Например, в некоторых вариантах осуществления для построения фильтра верхних частот может быть использована температура импульсной линии, подключенной к датчику. В соответствии с одним конкретным вариантом осуществления датчик давления расположен вблизи клапана для обнаружения кавитации в клапане. В таких вариантах осуществления датчик давления соединен с клапаном через импульсную линию. При измерении температуры импульсной линии фильтр верхних частот может быть построен для компенсации температурных изменений в импульсной линии, которые влияют на данные SPM, генерируемые из сигнала датчика давления. Это пример компенсации на системном уровне в сравнении с уровнем трансмиттера или полевого устройства.
[0073] Несмотря на то что настоящее изобретение было описано со ссылкой на предпочтительные варианты осуществления, специалистам в данной области техники будет ясно, что изменения в форме и деталях могут быть выполнены без отступления от сущности и объема данного изобретения.
Изобретение относится к области измерительной техники и может быть использовано в обрабатывающих установках жидкости и газа. Измерительная система включает в себя модуль (930) построения фильтра, который строит фильтр верхних частот (902) для фильтрации показаний датчика, характеризующих переменную процесса. Модуль (930) построения фильтра устанавливает значения для параметров фильтра на основе значения температуры, характеризующего температуру датчика (246), который получил показания датчика. Технический результат – повышение точности получаемых данных. 4 н. и 20 з.п. ф-лы, 15 ил.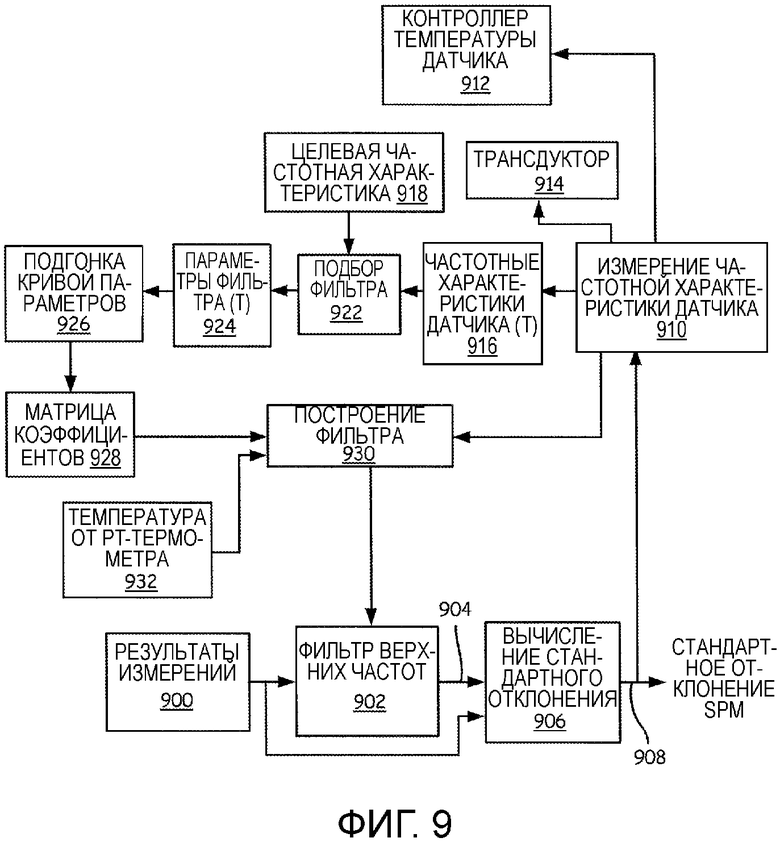
1. Технологическое полевое устройство, содержащее:
датчик переменной процесса, предоставляющий сигнал датчика, характеризующий переменную процесса;
датчик температуры, предоставляющий сигнал датчика температуры, характеризующий температуру упомянутого датчика переменной процесса;
схему преобразователей для преобразования сигнала датчика в показания датчика и сигнала датчика температуры в значения температуры;
процессор, реализующий цифровой фильтр, который фильтрует показания датчика для получения отфильтрованных показаний датчика, и выполняющий команды статистического контроля процесса, которые вычисляют статистическое значение по отфильтрованным показаниям датчика, причем цифровой фильтр является термозависимым, так что фильтр изменяется по мере изменения значений температуры.
2. Технологическое полевое устройство по п.1, в котором процессор строит цифровой фильтр путем подстановки значения температуры в уравнение, определяемое подгонкой кривой к значениям параметров, которые определены для фильтров, построенных для множества значений температуры.
3. Технологическое полевое устройство по п.2, в котором каждый из фильтров, построенных для множества значений температуры, строится для получения целевой частотной характеристики.
4. Технологическое полевое устройство по п.3, в котором целевая частотная характеристика содержит частотную характеристику стандартного отклонения отфильтрованных показаний датчика.
5. Технологическое полевое устройство по п.3, в котором целевая частотная характеристика содержит частотную характеристику, связанную с модельным датчиком, работающим в диапазоне, отличном от диапазона упомянутого датчика переменной процесса, и при выбранной температуре.
6. Технологическое полевое устройство по п.3, в котором целевая частотная характеристика содержит частотную характеристику модельного датчика с постоянной частотной характеристикой при всех температурах.
7. Измерительная система, содержащая модуль построения фильтра, строящий фильтр для фильтрования показаний датчика, характеризующих переменную процесса, причем модуль построения фильтра устанавливает значения для параметров фильтра на основе значения температуры, характеризующего температуру датчика переменной процесса, который получил показания датчика.
8. Измерительная система по п.7, в которой модуль построения фильтра устанавливает значение для параметра путем подстановки значения температуры в уравнение, определяемое подгонкой кривой к значениям параметров, которые определены для фильтров, построенных для множества значений температуры.
9. Измерительная система по п.8, в которой каждый из фильтров, построенных для множества значений температуры, строится для получения целевой частотной характеристики.
10. Измерительная система по п.9, в которой целевая частотная характеристика содержит частотную характеристику стандартного отклонения отфильтрованного сигнала датчика, причем упомянутый сигнал датчика производится модельным датчиком, работающим в том же диапазоне, что и упомянутый датчик переменной процесса, и при выбранной температуре.
11. Измерительная система по п.9, в которой целевая частотная характеристика содержит частотную характеристику стандартного отклонения отфильтрованного сигнала датчика, причем упомянутый сигнал датчика производится модельным датчиком, работающим в диапазоне, отличном от диапазона упомянутого датчика переменной процесса, и при выбранной температуре.
12. Измерительная система по п.9, в которой целевая частотная характеристика содержит частотную характеристику стандартного отклонения отфильтрованного сигнала датчика, причем упомянутый сигнал датчика производится модельным датчиком с постоянной частотной характеристикой при всех температурах.
13. Система управления, содержащая:
фильтр, который фильтрует серию показаний датчика для получения отфильтрованных показаний; и
блок статистического контроля процесса, который определяет статистическое значение по отфильтрованным показаниям и который подает сигнал предупреждения, когда статистическое значение пересекает порог, при этом фильтр фильтрует показания датчика для достижения желаемой частотной характеристики статистического значения, которое согласуется с частотной характеристикой статистического значения, получаемого от показаний датчика, генерируемых датчиком переменной процесса, работающим в выбранном диапазоне.
14. Система управления по п.13, в которой фильтр содержит термозависимый фильтр, который строится подстановкой значения температуры в соответствующие уравнения, каждое из которых определяет отдельный параметр фильтра.
15. Система управления по п.14, в которой каждое уравнение строится путем подгонки кривой к значениям параметра фильтра, определенным при различных температурах.
16. Система управления по п.13, в которой желаемая частотная характеристика статистического значения дополнительно согласуется с частотной характеристикой статистического значения, полученного из показаний датчика, генерируемых датчиком переменной процесса, работающим при выбранной температуре.
17. Система управления по п.13, в которой желаемая частотная характеристика статистического значения содержит частотную характеристику, полученную по меньшей мере частично датчиком, работающим в диапазоне, отличном от диапазона датчика переменной процесса, который произвел серию показаний датчика.
18. Система управления по п.13, в которой желаемая частотная характеристика статистического значения содержит частотную характеристику, полученную по меньшей мере частично датчиком, который был изготовлен отличным образом от датчика переменной процесса, который произвел серию показаний датчика.
19. Способ использования фильтра верхних частот, содержащий:
подготовку коэффициентов для параметров термозависимого фильтра;
прием сигнала датчика от датчика переменной процесса и сигнала датчика температуры, характеризующего температуру датчика переменной процесса, от датчика температуры;
построение фильтра с помощью параметров термозависимого фильтра и сигнала датчика температуры;
передачу сигнала датчика фильтру для получения отфильтрованного сигнала;
генерирование статистического значения из отфильтрованного сигнала; и
активацию сигнала оповещения, когда статистическое значение пересекает порог.
20. Способ по п.19, в котором подготовка коэффициентов для параметров термозависимого фильтра содержит:
выбор модельной частотной характеристики для статистического значения;
для каждой из множества температур выбор значений параметров фильтра, которые дают частотную характеристику для статистического значения, которая соответствует модельной частотной характеристике для статистического значения; и
для каждого параметра фильтра подгонку кривой, которая является функцией температуры, к значениям параметра фильтра при множестве температур с получением коэффициентов для параметров фильтра.
21. Способ по п.20, в котором модельная частотная характеристика содержит частотную характеристику, полученную по меньшей мере частично датчиком переменной процесса, работающим при выбранной температуре.
22. Способ по п.21, в котором датчик переменной процесса работает в выбранном рабочем диапазоне.
23. Способ по п.20, в котором температурный сигнал представляет собой температуру импульсной линии, подключенной к датчику переменной процесса, который генерирует сигнал датчика.
24. Способ по п.23, в котором импульсная линия дополнительно подключается вблизи клапана и датчик переменной процесса обнаруживает кавитацию в клапане.
| EP 1285841 B2, 15.09.2010 | |||
| US 20060047480 A1, 02.03.2006 | |||
| US 6017143 A, 25.01.2000 | |||
| JP 2011170518 A, 01.09.2011. |

