Заявленное изобретение относится к сспособам встречного разгона микрочастиц и может найти применение в качестве ускорителя для встречного столкновения, например молекул или атомов, лишенных заряда при получения химических реакций.
Известен способ ускорения микрочастиц, описанный в патенте RU 2327877 С2, 20.08.2003, который принципиально может быть использован для встречного разгона микрочастиц.
Недостаток известного способа разгона и столкновения заключается в том, что разгоняемые частицы распределены по большой поверхности пространства, что снижает вероятность их столкновения.
Наиболее близким к предлагаемому способу встречного разгона микрочастиц, по мнению авторов, и принятым за прототип является способ ускорения, описанный в патенте RU 2572520 C1, 20.01.2016, который может быть использован как составная часть ускорителя встречных микрочастиц.
В известном ускорителе ускорение микрочастиц происходит за счет взаимодействия частиц с выступающими винтовыми зубцами ротора и статора с расходящимися от входного отверстия к выходному шагом.
Его недостаток состоит в том, что скорость частиц на выходе ускорителя невелика, что в некоторых случаях может не соответствовать условию протекания химических реакций.
Задачей данного изобретения является создание простых и удобных для применения в различных областях ускорителей, способных обеспечить высокую суммарную скорость нейтральных микрочастиц, например молекул или атомов с высокой концентрацией, достаточной для протекания химических реакций.
Техническим результатом является возможность повышения вероятности слияния участвующих в процессе столкновения микрочастиц и образования новых химических веществ при встречном их соударении.
Технический результат достигается за счет того, что в способе встречного разгона и столкновения нейтральных микрочастиц согласно изобретению разгон микрочастиц на встречном направлении производится путем взаимодействия микрочастиц с выступающими поверхностями винтовых зубцов вращающегося ротора с расходящимся от входа к выходу ускорителей шагом и зубцами неподвижного статора с уменьшением площади пересекающихся поверхностей зубцов по мере расхождения упомянутого винтового шага, при котором микрочастицы фокусируют на выходе каждого из ускорителей путем их концентрации за счет уменьшения диаметра ротора и статора по мере перемещения частиц от входа в ускорители к их выходу.
Технический результат может быть достигнут и за счет того, что начало реакции в реакторе управляется микроконтроллером и контролируется датчиками температуры.
Реагулировать процесс реакции можно с помощью редукционных клапанов.
Скорость реакции и, соответственно, процесс образования нового вещества можно регулировать путем изменения числа оборотов ротора.
Управление начала реакции в реакторе с помощью микроконтроллера и контроль ее датчиками температуры позволит полностью вести весь процесс получения результирующего продукта.
Реагирование процесса реакции с помощью редукционных клапанов обеспечит простоту контроля.
Регулирование скорости реакции и, соответственно, процесса образования нового вещества путем изменения числа оборотов ротора, способствует обеспечению простоты контроля за ходом реакции.
Изобретение иллюстрируется фиг. 1-4.
На фиг. 1 изображен поперечный разрез ротора ускорителя.
На фиг. 2 нарисован продольный разрез статора.
На фиг. 3 показан продольный разрез статора и ротора в сборе.
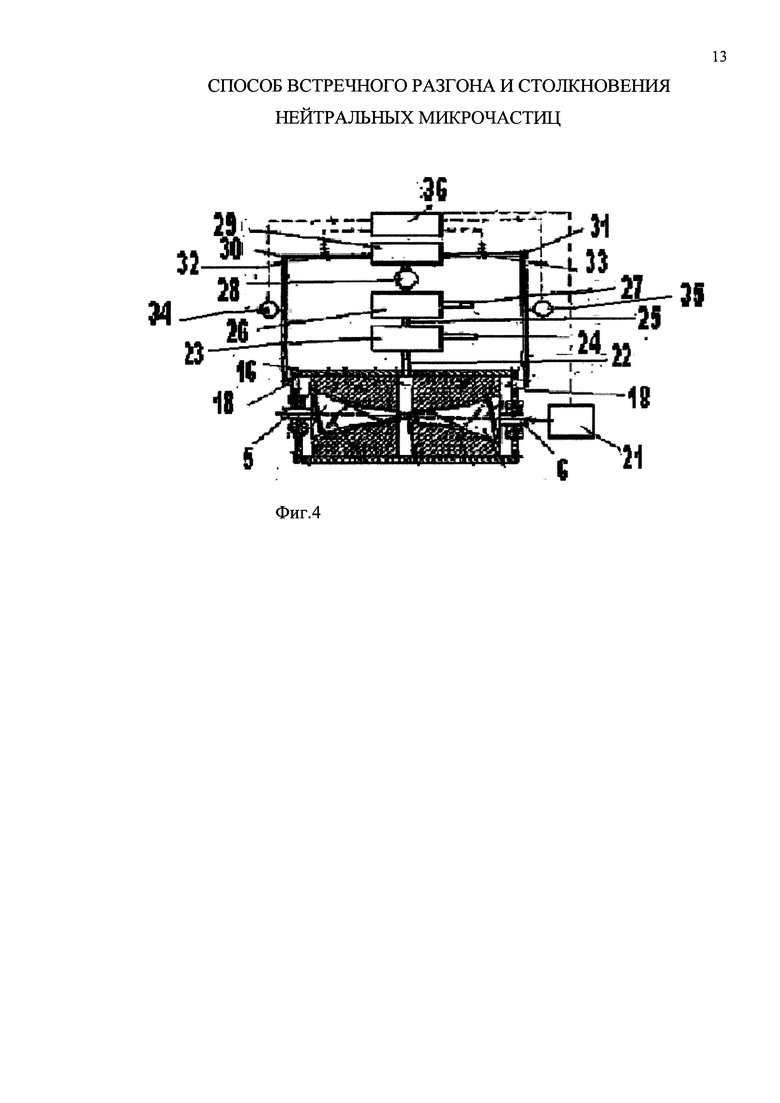
На фиг. 4 представлен ускоритель с реактором-регистратором процесса химической реакции.
Устройство, обеспечивающее указанный способ встречного разгона нейтральных микрочастиц, устроено следующим образом. Ротор 1 (фиг. 1) ускорителя выполнен в виде двух половин однополосного гиперболоида вращения 2 и 3. Половины гиперболоидов 2 и 3 направлены горловинами к его центру и соединены между собой общим валом 4. На поверхности ротора выполнены выступающие зубцы 7. Зубцы 7 ротора 1 в продольном направлении расположены по винтовой линии в виде шнека или винта с переменным шагом, расходящимся от концов ротора, к его середине. Шаг винтов ротора при подходе к его середине приближается к бесконечности. (На фиг. 1 показан только один виток). Конструкция предусматривает многозаходный винт. Количество зубцов может достигать двузначного или даже трехзначного числа и зависит от размера машины.
Ширина зубцов в местах их взаимного противостояния в каждом поперечном сечении определяется из соотношения [1]:

где bi - ширина зубца в i-м сечении, bз - ширина зубца в основании (расширенной части) ротора, di - диаметр ротора в i-м сечении, D - диаметр ротора в его основании (расширенной части), αi - угол наклона винтовой линии по отношению к линии, проходящей параллельно оси симметрии ротора, или угол пересечения между зубцами статора и ротора в i-м сечении. Ротор с двух сторон (с двух его концов) снабжен приводными валами 5 и 6.
Статор ускорителей состоит из двух цилиндрических труб 8 и 9 (фиг. 2), изготовленных преимущественно из металла и расположенных на одной оси, внутри которых выполнены сквозные продольные пустоты, по форме совпадающие с ротором (не обозначены) для установки ротора. Внутренняя поверхность статора содержит продольные зубцы 10. Эти зубцы расположены в плоскостях, проходящих через ось симметрии ускорителей, и продолжаются вдоль всей его внутренней поверхности. Число зубцов статора равно числу зубцов ротора. Ширина зубцов в местах их взаимного противостояния в каждом поперечном сечении определяется из того же соотношения, что и ширина зубцов ротора. Шаг винта Р приближается к Р=V/n, где n - число оборотов вала ротора в секундах, V - скорость движения микрочастицы.
В свою очередь, устройство для встречного разгона (УВР) состоит из двух ускорителей 11, 12 (фиг. 3). Каждый из ускорителей представляет собой половину ротора в виде гиперболоида со своим статором. Так, ускоритель 11 содержит половину 2 ротора 1 и статор 13. Ускоритель 12 содержит половину 3 ротора 1 и статор 14. Ускорители направлены суженной стороной (горловинами гиперболоидов) навстречу друг другу. Ротор 1 установлен с возможностью вращения коаксиально с минимальным зазором внутри статора 13, 14. Оба ускорителя заключены в общую станину 15, в которой имеются окна 16 для установки исследовательской аппаратуры (не указана). Станина неподвижна и может содержать лапы, наподобие лап электрических машин для ее крепления к поверхности. С двух сторон УВРа прикреплены щиты 17, в которых выполнены окна 18 для подачи испытуемого материала, в качестве которого может быть жидкость или газ. Между ротором 1 и станиной 15 расположены подшипники качения 19 и 20, связывающие валы ротора соответственно 5 и 6.
В варианте конструкции, иллюстрирующей данный способ, вал ротора 7 имеет механическую связь с внешним приводом (на фиг 4. не показан). В системе имеется регулятор частоты вращения 21 электропривода. Сквозные окна 16 связаны шлангом 22 с реактором 23, в котором происходит анализ результатов реакции реагентов с последующей его утилизацией. Реактор 23 снабжен датчиком температуры и давления. Если реакция экзотермическая, то производится отбор тепловой энергии с последующей ее утилизацией через канал 24. Если реакция эндотермическая, в реактор подается тепло, например горячий воздух. Отработавшие в реакторе 23 продукты через шланг 25 поступают в фильтровальную камеру 26. Фильтровальная камера снабжена отводным шлангом с ручным клапаном, необходимым для вывода отстоя (не обозначен). После фильтровальной камеры очищенные от отходов продукты поступают через шланг 27 в вакуумный насос 28 и после насоса подаются в пополняемую расходную емкость 29. В свою очередь, расходная емкость 29 двумя шлангами 30 и 31 соединена со сквозными отверстиями станины 18, расположенными с левой и с правой ее сторон. В шланге 30 имеется электроуправляемый редукционный клапан 32. В шланге 31 имеется электроуправляемый редукционный клапан 33. Шланги снабжены также датчиками давления соответственно 34 и 35. Система управления сосредоточена в контроллере 36, в который поступают сигналы от датчиков давления 34 и 35. В контроллер 36 также поступают сигналы о температуре в реакторе 23.
Способ встречного разгона и столкновения нейтральных микрочастиц действует следующим образом. При вращении ротора 1 внутри неподвижного статора 8, 10 (фиг. 3, 4) используемые образцы (жидкость или газ) поступают во входные окна 18 и затем проходят через зазоры, образованные зубцами статора 10 и ротора 7. Локальные зазоры, сформированные между зубцами статора и ротора, будут линейно и непрерывно с ускорением смещаться в сторону от концов статора и ротора к центру УВРа в суженной его части. При этом движение микрочастиц будет формироваться двумя силами. Первая сила образуется за счет шнекового эффекта, при котором частицы, оказавшиеся в пазах, будут двигаться вдоль пазов. Вторая сила образуется за счет того, что частицы благодаря центробежным силам попадают в зазор между зубцами ротора и статора в зоны взаимного пересечения зубцов и оказываются в гравитационной ловушке. Иными словами, микрочастицы образцов, попадающие в зазор между зубцами, взаимодействуют с зубцами по принципу взаимного притяжения согласно формуле
где m1 - массы микрочастиц исследуемого материала и m2 - массы ротора и статора, которые взаимодействуют с частицами с силой Fi; R - расстояние между массами зубцов ротора и статора и микрочастицами; Y1=6,67384(80)⋅10-11 м3⋅с-2⋅кг-1 или Н⋅м2⋅кг-2. универсальная постоянная. Что касается расстояния R, то в предлагаемом ускорителе эта величина неопределенна, поскольку элементы материала находятся во взаимодействии с двумя движущимися параллельно массами, расположенными с двух сторон от микрочастиц, и это расстояние на практике может приближаться к нулю. Во всяком случае, R в сотни и тысячи раз меньше, чем если бы взаимодействие было односторонним.
Площадь зазора между зубцами статора и ротора зависит от угла «α» взаимного пересечения зубцов статора и ротора и диаметра ротора согласно формуле [1]. Максимальные размеры этой площади, на входе в ускорители, где она равна bз2 при α=90°. По мере перемещения микрочастиц эта площадь постоянно снижается, что приводит к увеличению их концентрации на выходе ускорителей, и будет иметь вид ромба.
Если шаг Р винтовых пазов статора и ротора на выходе приближен к Р=V/n, где n - число оборотов вала ротора в секундах, V - скорость движения микрочастицы, то скорость истечения микрочастиц будет соразмерна с релятивистской скоростью, при этом масса частиц будет определяться согласно формуле

где m0 - масса частиц на входе в ускоритель, m - масса ускоренной частицы, V - скорость ускоренной частицы, с - скорость света.
Согласно формуле [3] взаимодействие между частицами и зубцами ротора и статора по мере их ускорения и приближения в выходным отверстиям ускорителей будет увеличиваться. При этом концентрации микрочастиц будет возрастать и в соответствии с уменьшением диаметра ротора. По мере приближения микрочастиц к суженной части, концентрация λ микрочастиц будет дополнительно увеличиваться обратно пропорционально соотношению квадратов диаметров d на выходе ускорителей к диаметру D их на входе в соответствии с формулой 4
При этом сама скорость вращения ротора может быть относительно невелика, что позволит снизить шум и вибрацию. Выявлять появление новых частиц можно с помощью регистрирующей аппаратуры в ускорителе, избраженном на фиг. 4.
Вероятность столкновения частиц зависит от площади поверхности, плотности потока частиц, участвующих в актах взаимодействия в единицу времени и скорости столкновения. В данном изобретении площадь поверхности в месте столкновения с учетом снижения внешней поверхности зубцов приближается к минимальному значению, а плотность потока частиц регулируется с помощью редукционных клапанов. Для реагирования на процесс столкновения микрочастиц и предусмотрена схема с реактором - регистратором столкновений (фиг. 4). Процесс начала реакции при столкновении контролируется датчиками температуры и управляется контроллером 36. Подвод или отвод тепла осуществляется по показания датчиков температуры. Контроллер 36 воздействует на клапаны 31 и 33 и регулятор частоты вращения 21. Прореагировавшие продукты с помощью вакуумного насоса 20 перекачиваются в расходную емкость 29, в которой смешиваются с исходным продуктом. Затем по шлангам 30 и 31 исходный продукт поступает в отверстия 18 для повторного реагирования. Контроллер 36 позволяет регулировать процесс столкновения на определенном уровне, получая сигналы от датчиков температуры охладителя, скорости вращения ротора и датчиков давления 34 и 35.
Скорость V и соответственно скорость реакции можно регулировать путем изменения числа оборотов ротора. При этом сама скорость вращения ротора может быть относительно невелика, что позволит снизить шум и вибрацию. Превращение и сохранение энергии при химических реакциях в качестве примера можно записать так: 2H2O=2H2+O2 - 572кДж - 483,6 кДж на один моль O2 (реакция экзотермическая); N2+О2=2NO-Q(+ΔQ) (реакция эндотермическая).
В химических реакциях соединения хотя бы два элемента образуют один продукт и инициируется активными частицами реагентов. Как показали расчеты, число соударений между частицами, находящимися в газовых и жидких средах за единицу времени, всегда достаточно велико. Так, в 1 см3 газа за одну секунду происходит ~1⋅1028 столкновений между молекулами. Если бы каждое из них приводило к образованию конечных продуктов, то подавляющее большинство химических реакций протекали бы практически мгновенно. На практике этого не наблюдается, т.к. не все соударения между молекулами исходных веществ являются «успешными». Установлено, что для многих реакций число таких «успешных» соударений ~ в 1015-1020 раз меньше, чем общее число соударений. Протекание реакции становится возможным только в том случае, если столкнувшиеся молекулы обладают достаточным запасом внутренней энергии. Если ее значение равно какой-то определенной величине или больше ее, то реакция осуществится. Такие молекулы называются активными, а соударения между ними эффективными. Обычно доля активных молекул реагентов по сравнению с их общим числом для большинства реакций невелика. Поэтому если удастся увеличить число активных элементов, участвующих в реакции, то это приведет к ускорению процесса, т.е. повысить эффективность. Данное изобретение позволяет увеличить число активных молекул и резко повысить эффективность химической реакции.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВСТРЕЧНОГО РАЗГОНА НЕЙТРАЛЬНЫХ МИКРОЧАСТИЦ | 2016 |
|
RU2633994C1 |
| ГРАВИТАЦИОННЫЙ УСКОРИТЕЛЬ | 2014 |
|
RU2579752C1 |
| СПОСОБ УСКОРЕНИЯ НЕЙТРАЛЬНЫХ МИКРОЧАСТИЦ | 2014 |
|
RU2572520C1 |
| ВИНТОВОЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2327877C1 |
| БЕЗРЕАГЕНТНЫЙ РЕАКТОР ОЧИСТКИ ВОДЫ | 2024 |
|
RU2834556C1 |
| УСТАНОВКА ДЛЯ ОЧИСТКИ И ОБЕЗЗАРАЖИВАНИЯ ВОДЫ | 2005 |
|
RU2304561C2 |
| УСТАНОВКА ДЛЯ ОЧИСТКИ И ОБЕЗЗАРАЖИВАНИЯ ВОДЫ | 2005 |
|
RU2305073C9 |
| Способ для производства микрочастиц соединения | 2010 |
|
RU2673525C2 |
| РЕАКТОР И СПОСОБ ПРОИЗВОДСТВА ЧАСТИЦ В ПРОЦЕССЕ ОСАЖДЕНИЯ | 2010 |
|
RU2553881C2 |
| ЦИКЛОТРОННЫЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ | 2012 |
|
RU2517004C2 |
Изобретение относится к способам встречного разгона нейтральных микрочастиц. При вращении ротора 1 внутри неподвижного статора 8, 10 исследуемые образцы (жидкость или газ) поступают во входные окна 18 и затем проходят через зазоры, образованные зубцами статора 10 и ротора 7. При этом движение микрочастиц будет формироваться двумя силами. Первая сила образуется за счет шнекового эффекта, при котором частицы, оказавшиеся в пазах, будут двигаться вдоль пазов. Вторая сила образуется за счет того, что частицы благодаря центробежным силам попадают в зазор между зубцами ротора и статора в зоны взаимного пересечения зубцов. Площадь зазора между зубцами статора и ротора определяется в зависимости от угла взаимного пересечения зубцов статора и ротора. Максимальные размеры этой площади, на входе в ускорители. Техническим результатом является снижение расхода материала, повышение КПД установок для встречного разгона и снижение их габаритов. 3. з.п. ф-лы, 4 ил.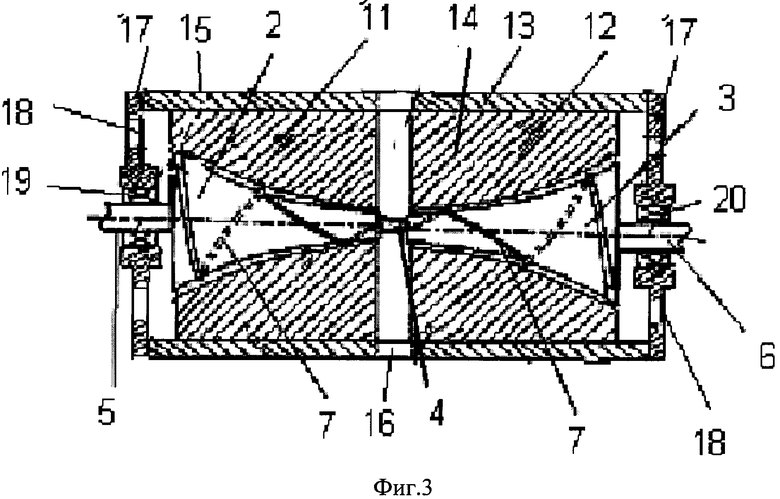
1. Способ встречного разгона и столкновения нейтральных микрочастиц на встречном направлении, отличающийся тем, что разгон микрочастиц на встречном направлении производится путем взаимодействия микрочастиц с выступающими поверхностями винтовых зубцов вращающегося ротора с расходящимся от входа к выходу ускорителей шагом и зубцами неподвижного статора с уменьшением площади пересекающихся поверхностей зубцов по мере расхождения упомянутого винтового шага, при котором микрочастицы фокусируют на выходе каждого из ускорителей путем их концентрации за счет уменьшения диаметра ротора и статора по мере перемещения частиц от входа в ускорители к их выходу.
2. Способ по п. 1, отличающийся тем, что начало реакции в реакторе управляется микроконтроллером и контролируется датчиками температуры.
3. Способ по п. 1, отличающийся тем, что процесс реакции регулируется с помощью редукционных клапанов.
4. Способ по п. 1, отличающийся тем, что скорость реакции и, соответственно, процесс образования нового вещества регулируются изменением числа оборотов ротора регулировать путем изменения числа оборотов ротора.
| СПОСОБ УСКОРЕНИЯ НЕЙТРАЛЬНЫХ МИКРОЧАСТИЦ | 2014 |
|
RU2572520C1 |
| ВИНТОВОЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2327877C1 |
| МНОГОСТУПЕНЧАТАЯ ОСЕВАЯ И РАДИАЛЬНАЯ ЮНГСТРЕМА ТУРБОМАШИНА БЕЗ ВЫХОДНОГО ВАЛА | 2002 |
|
RU2253737C2 |
| US 5376827 A, 27.12.1994. | |||

