Заявленное изобретение относится к устройствам для встречного разгона нейтральных микрочастиц и может найти применение для сталкивания, например, молекул или атомов, лишенных заряда при химических реакциях.
Известно устройство для разгона микрочастиц, описанное в патенте RU 2327877 С2, 20.08.2003, которое принципиально может быть использовано для встречного разгона микрочастиц.
Недостаток известного устройства для разгона и столкновения заключается в том, что разгоняемые частицы распределены по большому объему пространства, что снижает вероятность их столкновения.
Наиболее близким к предлагаемому устройству для встречного разгона микрочастиц, по мнению авторов, и принятым за прототип является устройство для ускорения, описанное в патенте RU №2579752, которое может быть использовано как составная часть ускорителя дл столкновения микрочастиц.
Его недостаток заключается в том, что скорость столкновения частиц ограничена.
Задачей данного изобретения является создание простых и удобных для применения в различных областях ускорителей, способных обеспечить высокую суммарную скорость нейтральных микрочастиц, например молекул или атомов, с высокой концентрацией, достаточной для протекания химических реакций.
Техническим результатом является повышение вероятности слияния участвующих в процессе столкновения микрочастиц и образование новых химических веществ при встречном их соударении.
Технический результат достигается за счет того, что в устройстве ускорителя для встречного разгона и столкновения нейтральных микрочастиц, содержащем систему управления и состоящем из коаксиально установленных с зазором и вращающихся относительно друг друга ротора и статора, выполненных так, что на входе ускорителя их диаметры больше, чем на выходе, на взаимообращенных поверхностях которых выполнены выступающие зубцы с винтовыми пазами, идущими в противоположном направлении между ротором и статором с расходящимся от входного к выходному отверстиям ускорителя шагом, с числом зубцов ротора, равным числу зубцов статора и непрерывным зазором между каждым из зубцов статора и ротора, с шириной наружной поверхности зубцов, выполненной в зависимости от угла α их взаимного пересечения равной:

где bi - ширина зубца в i-м сечении, bз - ширина зубца в основании ротора, di - диаметр ротора в i-м сечении, D - диаметр ротора в его широкой части, α - угол пересечения между зубцами статора и ротора в i-м сечении ускорителя, согласно изобретению устройство для встречного разгона состоит из двух ускорителей, направленных суженной стороной навстречу друг другу, причем в поперечном сечении выступающие зубцы выполнены в виде равнобедренной трапеции в расширенной части ротора и статора ускорителя и приближающимися к равнобедренному треугольнику в суженной его части.
Технический результат может быть достигнут за счет того, что ускоритель выполнен в виде двух половин однополосного гиперболоида вращения, направленных горловинами к его центру и соединенных между собой общим валом.
Технический результат может быть достигнут за счет того, что ускоритель выполнен в виде двух прямых круглого сечения конусов с вершинами, направленными навстречу друг к другу и переходящими в центре в цилиндры.
Технический результат может быть достигнут и за счет того, что в схеме управления установлен реактор с микроконтроллером и датчиком температуры.
Выполнение выступающих зубцов в виде равнобедренной трапеции в расширенной части ротора и статора ускорителя приближающимися к равнобедренному треугольнику в суженной его части позволяет упростить технологию изготовления ускорителя и повысить его прочность.
Выполнение ротора ускорителя в виде двух прямых круглого сечения конусов, переходящих в центре в цилиндры, способствует упрощению технологии изготовления.
Выполнение ускорителя в виде двух половин однополосного гиперболоида вращения, направленных горловинами к его центру и соединенных между собой общим валом, обеспечивает практически двойное увеличение скорости столкновения микрочастиц.
Применение микроконтроллера и датчиков температуры в схеме управления реактором упрощает работу оператора, контролирующего процесс работы.
Устройство для встречного разгона нейтральных микрочастиц иллюстрируется 8-ю фигурами.
На фиг. 1 имеется вид ротора и статора ускорителя в поперечном разрезе в расширенной его части.
Фиг. 2 демонстрирует вид ротора и статора ускорителя в поперечном разрезе в той его части, где он сужен.
На фиг. 3 изображен ротор ускорителя из встречно направленных горловин однополосного гиперболоида.
На фиг. 4 имеется вид статора ускорителя, применительно к ротору, имеющегося на фиг. 3.
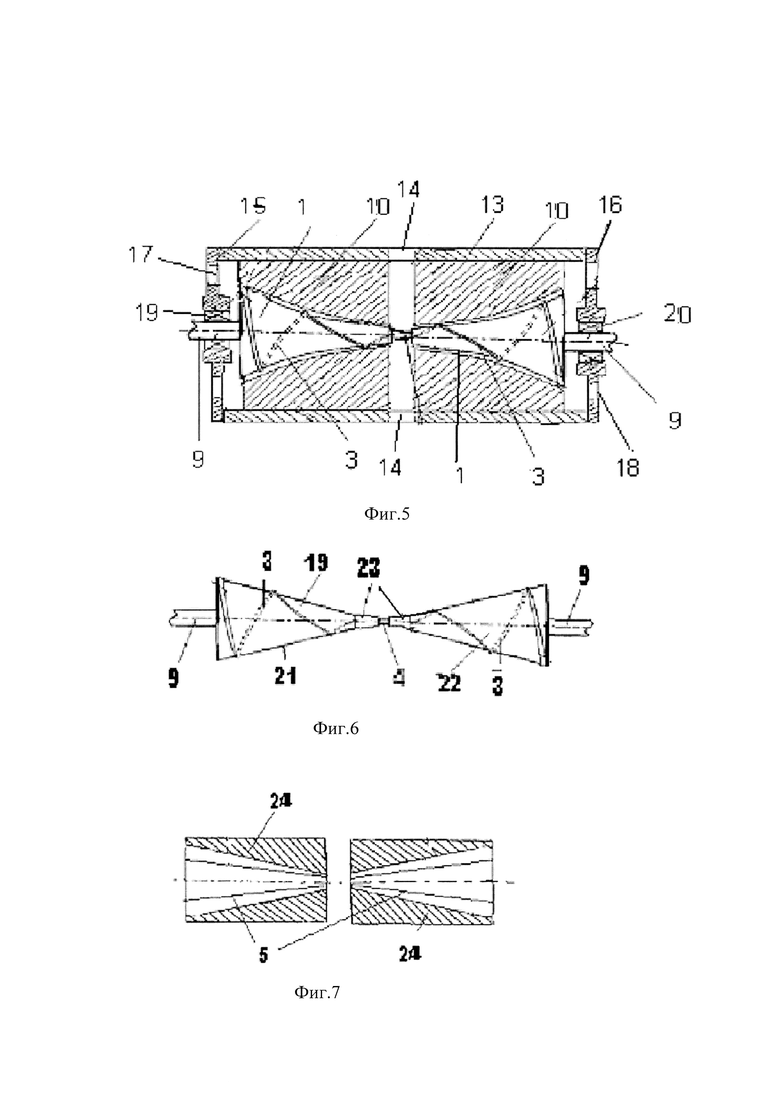
Фиг. 5 демонстрирует ускоритель в сборе с ротором ускорителя, выполненным из встречно направленных горловин однополосного гиперболоида.
На фиг. 6 показан ротор ускорителя в виде направленных навстречу друг к другу двух прямых круглого сечения конусов.
На фиг. 7 изображен статор ускорителя применительно к ротору, имеющемуся на фиг. 6.
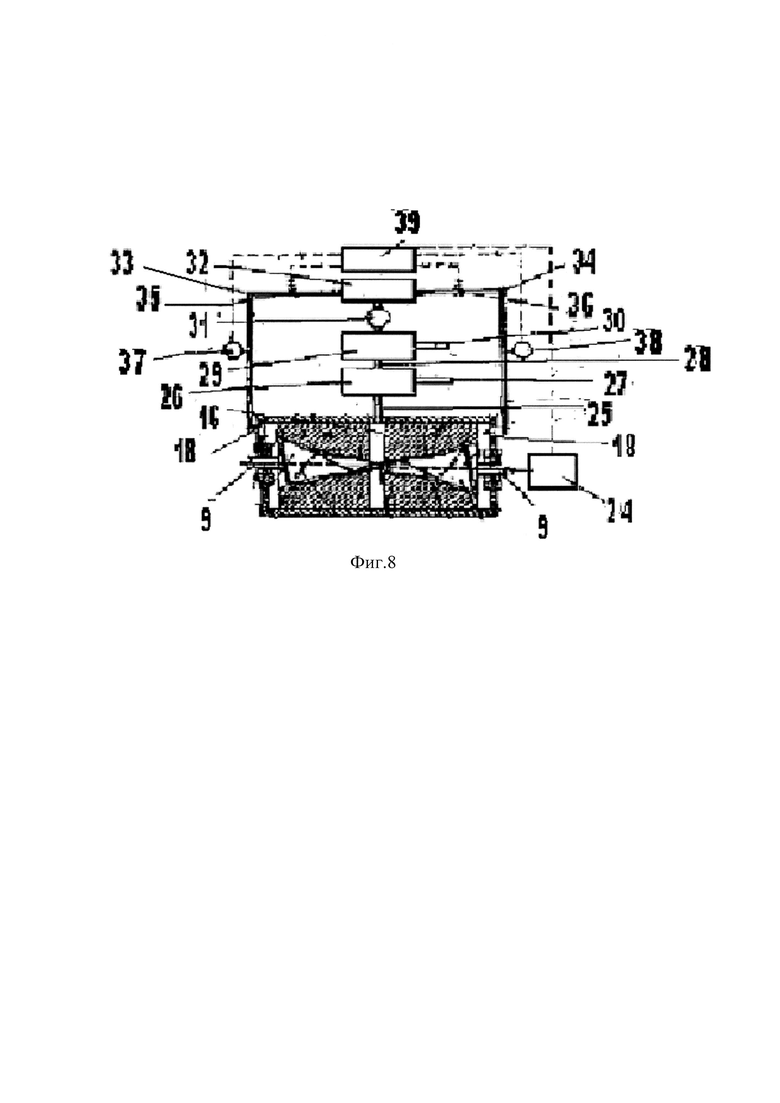
На фиг. 8 представлен ускоритель с реактором-регистратором процесса химической реакции.
Устройство для встречного разгона микрочастиц выполнено следующим образом. Ротор 1 (фиг. 1) расположен внутри статора 2 и имеет на своей поверхности выступающие зубцы 3, которые в профиль в расширенной его части выполнены в виде равнобедренной трапеции с пазами треугольной формы 4. В свою очередь статор 2 также имеет выступающие зубцы 5 в расширенной его части, выполненные в виде равнобедренной трапеции с пазами треугольной формы 6.
Зубцы в суженной части и ротора 1, и статора 2 (фиг. 2) приближаются к равнобедренному треугольнику с пазами 4 в виде равнобедренного треугольника. Статор также в суженной своей части имеет выступающие зубцы 5, выполненные в виде, близком к равнобедренному треугольнику с пазами треугольной формы 6. В продольном направлении зубцы 3 ротора проходят вдоль всей его внутренней поверхности и расположены по винтовой линии с переменным шагом, расходящимся от расширенной части ротора и статора. Шаг винтовой линии ротора при подходе к его суженной части приближается к бесконечности. Число зубцов статора равно числу зубцов ротора. Ширина зубцов статора и ротора в местах их взаимного противостояния в каждом поперечном сечении определяется из соотношения:

где bi - ширина зубца в i-том сечении, bз - ширина зубца в основании (расширенной части) ротора, di - диаметр ротора в i-том сечении, D - диаметр ротора в его основании, αi - угол наклона винтовой линии по отношению к линии, проходящей параллельно оси симметрии ротора или угол пересечения между зубцами статора и ротора в i-том сечении.
Ротор 1 ускорителя выполнен в виде двух половин 7 (фиг. 3) однополосного гиперболоида вращения, направленных горловинами к его центру и соединенных между собой общим валом 8. Роторы имеют выходные приводные валы 9.
Статор ускорителей состоит из двух цилиндрических труб 10 (фиг. 4), изготовленных, преимущественно из металла и расположенных на одной оси, внутри которых выполнены сквозные продольные пустоты, по форме совпадающие с ротором (на фиг. не обозначены) для установки ротора.
В свою очередь устройство для встречного разгона (УВР) состоит из двух ускорителей 11, 12 (фиг. 5), направленных суженной стороной навстречу друг другу. Каждый из ускорителей представляет собой половину ротора в виде гиперболоида со своим статором. Так, ускоритель 11 содержит половину 2 ротора 1 и статор 10. Ускоритель 12 содержит половину 3 ротора 1 и статор 10. Ускорители направлены суженной стороной (горловинами гиперболоидов) навстречу друг другу. Ротор 1 установлен с возможностью вращения коаксиально с минимальным зазором внутри статоров 10. Оба статора заключены в общую станину 13, в центре которой имеются окна 14 для связи с исследовательской аппаратурой (на фиг. не показана). Станина 13 неподвижна и может содержать лапы, наподобие лап электрических машин, для ее крепления к поверхности. С двух сторон ускорителя прикреплены щиты 15 и 16, в которых выполнены окна 17, 18 для подачи испытуемого материала, в качестве которого может быть жидкость или газ. Между станиной 13 и ротором 1 с двух сторон установлены подшипники 19 и 20.
В варианте технического решения ротор 1 ускорителя выполнен в виде двух прямых круглого сечения конусов 21 и 22 (фиг. 6), переходящих в центре в цилиндры соответственно 23, объединенные общим валом 4.
Статор для ротора, состоящего из конических конусов, изображен на фиг. 7 и выполнен аналогично фиг. 4 с той разницей, что он допускает возможность установки в нем конического ротора. Такой статор состоит из цилиндрических труб 24 с коническими пустотами (на фиг. не обозначены) расположенных на одной оси с ротором.
(УВР) с коническим ротором выполнено идентично (фиг. 5) и отличается только видом ротора в коническом исполнении. Каждый из ускорителей представляет собой половину ротора в виде конусов со своим статором (на фиг. не показан).
Ускоритель с реактором-регистратором процесса химической реакции (фиг. 8) содержит валы ротора 9, один из которых имеет механическую связь с внешним приводом (на фиг. 8 не показан). В системе имеется регулятор частоты вращения 24 электропривода. Окна 18 связаны шлангом 25 с реактором 26, в котором происходит анализ результатов реакции реагентов с последующей его утилизацией. Реактор 26 снабжен датчиком температуры и давления. Если реакция экзотермическая, то производится отбор тепловой энергии с последующей ее утилизацией через канал 27. Если реакция эндотермическая, в реактор подается тепло, например горячий воздух. Отработавшие в реакторе 26 продукты через шланг 28 поступают в фильтровальную камеру 29. Фильтровальная камера снабжена отводным шлангом 30 с ручным клапаном, необходимым для вывода отстоя (на фиг. не обозначен). После фильтровальной камеры очищенные от отходов продукты поступают в вакуумный насос 31 и после насоса подаются в пополняемую расходную емкость 32. В свою очередь, расходная емкость 32 двумя шлангами 33 и 34 соединена с отверстиями станины 18, расположенными с правой и левой ее сторон. В шланге 33 имеется электроуправляемый редукционный клапан 35. В шланге 34 имеется электроуправляемый редукционный клапан 36. Шланги снабжены также датчиками давления соответственно 37 и 38. Система управления сосредоточена в микроконтроллере 39, в который поступают сигналы от датчиков давления 37 и 38. В контроллер 39 также поступают сигналы о температуре в реакторе 27.
Устройство для встречного разгона микрочастиц действует следующим образом. От внешнего привода (на фиг. не показан) через один из валов 9 или через оба вместе приводят во вращение ротор 1, состоящий из половин 7 (если ротор гиперболоидный) или 21, 22 (если ротор конический). В зазор между неподвижными статорами 10 и половинами ротора 7 (или 21, 22)_ (фиг. 5) через окна 18 подают испытуемый материал: жидкость или газ или другие взвешенные микрочастицы. Этот материал проходят в зазоры, образованные зубцами 3 ротора и зубцами 5 статора. Локальные зазоры, сформированные между зубцами статора и ротора, будут при вращении ротора непрерывно с ускорением смещаться в сторону от начал ускорителя к его концам в суженной части. При этом движение микрочастиц будет формироваться двумя силами. Первая сила образуется за счет шнекового эффекта, при котором частицы, оказавшиеся в пазах, будут двигаться вдоль пазов. Вторая сила образуется за счет того, что частицы благодаря центробежным силам, попадают в зазор между зубцами ротора и статора в зоны взаимного пересечения зубцов и оказываются в гравитационной ловушке. Иными словами, микрочастицы образцов, попадающие в зазор между зубцами статора и ротора, взаимодействуют с зубцами по принципу взаимного притяжения согласно формуле:
где m1 - масса микроэлемента исследуемого материала и m2 - массы ротора и статора, которые взаимодействуют с частицами с силой Fi; R - расстояние между массами ротора и статора и отдельными микрочастицами, Yу=6,67384(80)⋅10-11 м3⋅с-2⋅кг-1, или Н⋅м2⋅кг-2, универсальная постоянная. Что касается расстояния R, то в предлагаемом ускорителе величина неопределенна, поскольку элементы материала находятся во взаимодействии с двумя движущимися параллельно массами, расположенными с двух сторон от микрочастиц, и это расстояние на практике может приближаться к нулю. Во всяком случае, R в сотни и тысячи раз меньше, чем если бы взаимодействие было односторонним.
Площадь зазора между зубцами статора и ротора зависит от угла «α» взаимного пересечения зубцов статора и ротора и диаметра ротора согласно формуле [1]. Максимальные размеры этой площади - на входах в УВР, где она равна b32 при α=90°. По мере перемещения микрочастиц эта площадь будет принимать вид удлиненного ромба. Площадь пересечения зубцов постоянно снижается, что приводит к увеличению концентрации микрочастиц на выходе ускорителя. По мере приближения микрочастиц к суженной части концентрация микрочастиц будет дополнительно увеличиваться обратно пропорционально соотношению квадратов диаметров d на выходе ускорителей к диаметру D их на входе согласно формуле 3.
Если шаг винтовых пазов статора и ротора на выходе ускорителей достаточно высок, то и скорость истечения микрочастиц будет достаточно высокой, при этом масса частиц будет определяться согласно формуле:

где m0 - масса частиц на входе каждого ускорителя, m - масса ускоренной частицы, V - скорость ускоренной частицы на выходе каждого из ускорителей, «с» - скорость света.
Согласно формуле [4] взаимодействие между частицами и зубцами ротора и статора по мере их ускорения и приближения к центру ускорителя будет усиливаться.
Скорость V микрочастиц можно регулировать путем изменения числа оборотов ротора. При этом сама скорость вращения ротора может быть относительно невелика, что позволит снизить шум и вибрацию. Скорость же V движения микрочастиц на выходе каждого из ускорителей определяется скоростью вращения ротора и выходным шагом винтовой поверхности согласно соотношению V=Р×n, где Р - шаг винта, n - число оборотов вала ротора. При этом шаг винта Р приближается к Р=V/n, где n - число оборотов вала ротора в секундах, V - скорость движения микрочастицы.
Очевидно, что скорость встречного движения частиц при их столкновении будет значительно выше, чем на выходе ускорителя, что скажется на результатах их взаимодействия.
В варианте технического решения, когда ротор ускорителя выполнен в виде двух прямых круглого сечения конусов 21, 22 (фиг. 6), переходящих в цилиндры 23. ускоритель действует по тому же принципу, что и при гиперболоидном роторе.
Сложность изготовления УВР заключается в том, что необходимо совместить два ускорителя, не нарушая зазор между статором и ротором, однако эта технологическая проблема решается с помощью современных средств. Большая скорость молекул или атомов, лишенных заряда, необходима для получения химических реакций. При этом энергия активации Еа- это та дополнительная энергия (к средней энергии Е сталкивающихся частиц), которая требуется, чтобы обеспечить химическую реакцию. Неупругое столкновение означает образование связи между молекулами с получением нового вещества, т.е. реакции слияния. Начальное и конечное состояние вещества в химической реакции разделены неким энергетическим барьером. Его величину обычно выражают в кДж на моль А (или на моль Б). Этот барьер называемый энергией активации реакции и обозначается символом Еа. Скорость столкновения молекул для обеспечения химических реакций на несколько порядков меньше скорости, требуемой для ядерного синтеза. Предлагаемый способ может быть применен, в частности, для образовании экзотермических реакций, например для холодного сжигания водорода при столкновении с атомами кислорода в соответствующей пропорции с выделением тепла.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВСТРЕЧНОГО РАЗГОНА И СТОЛКНОВЕНИЯ НЕЙТРАЛЬНЫХ МИКРОЧАСТИЦ | 2016 |
|
RU2633964C1 |
| ГРАВИТАЦИОННЫЙ УСКОРИТЕЛЬ | 2014 |
|
RU2579752C1 |
| СПОСОБ УСКОРЕНИЯ НЕЙТРАЛЬНЫХ МИКРОЧАСТИЦ | 2014 |
|
RU2572520C1 |
| ВИНТОВОЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2327877C1 |
| БЕЗРЕАГЕНТНЫЙ РЕАКТОР ОЧИСТКИ ВОДЫ | 2024 |
|
RU2834556C1 |
| СПОСОБ ДИСПЕРГИРОВАНИЯ ЖИДКОСТЕЙ, ИХ СМЕСЕЙ И ВЗВЕСЕЙ ТВЕРДЫХ ТЕЛ В ЖИДКОСТЯХ | 2007 |
|
RU2344874C1 |
| СПОСОБ ПРОМЫШЛЕННОЙ ДОБЫЧИ ВНУТРЕННЕЙ ЭНЕРГИИ-МАССЫ ВАКУУМА МАТЕРИАЛЬНОГО, ОСВОБОЖДАЕМОЙ ИЗ МНОГОМЕРНО КВАНТУЮЩЕЙСЯ МИРОВОЙ ЭНЕРГОСИСТЕМЫ "ВАКУУМ МАТЕРИАЛЬНЫЙ + НУКЛИДЫ", И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145742C1 |
| СПОСОБ ДЕЗИНТЕГРИРОВАНИЯ КУСКОВОГО СЫРЬЯ | 2019 |
|
RU2704865C1 |
| УСТАНОВКА ДЛЯ ОЧИСТКИ И ОБЕЗЗАРАЖИВАНИЯ ВОДЫ | 2005 |
|
RU2304561C2 |
| Газоструйная мельница | 1982 |
|
SU1074596A1 |
Изобретение относится к устройствам для встречного разгона нейтральных микрочастиц. Устройство содержит систему управления и состоит из коаксиально установленных двух ускорителей, направленных суженной стороной навстречу друг другу, с зазором и вращающихся относительно друг друга ротора 1 и статоров 10, выполненных так, что на входе ускорителя их диаметры больше, чем на выходе, на взаимообращенных поверхностях которых выполнены выступающие зубцы 3 с винтовыми пазами, идущими в противоположном направлении между ротором и статором с расходящимся от входного к выходному отверстиям ускорителя шагом, с числом зубцов ротора, равным числу зубцов статора и непрерывным зазором между каждым из зубцов статора и ротора, с шириной наружной поверхности зубцов, выполненной в зависимости от угла α их взаимного пересечения, причем в поперечном сечении выступающие зубцы выполнены в виде равнобедренной трапеции в расширенной части ротора и статора ускорителя и приближающимися к равнобедренному треугольнику в суженной его части. Техническим результатом является создание высокой концентрации нейтральных микрочастиц, таких как молекулы или атомы. 3 з.п. ф-лы, 8 ил.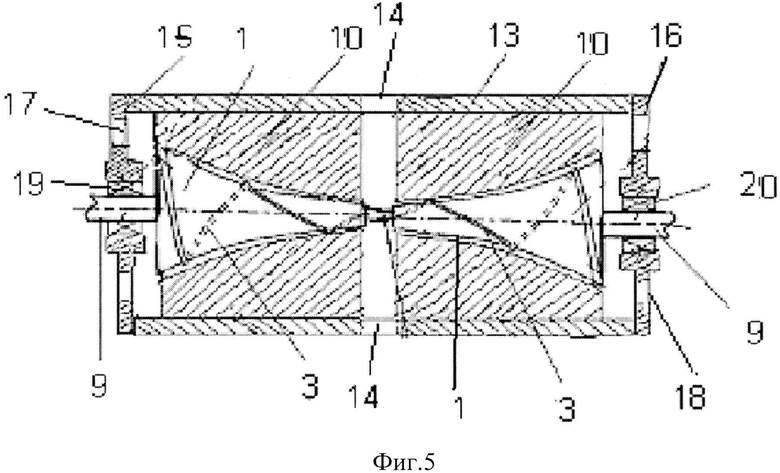
1. Устройство для встречного разгона и столкновения нейтральных микрочастиц, содержащее систему управления и состоящее из коаксиально установленных с зазором и вращающихся относительно друг друга ротора и статора, выполненных так, что на входе ускорителя их диаметры больше, чем на выходе, на взаимообращенных поверхностях которых выполнены выступающие зубцы с винтовыми пазами, идущими в противоположном направлении между ротором и статором с расходящимся от входного к выходному отверстиям ускорителя шагом, с числом зубцов ротора, равным числу зубцов статора и непрерывным зазором между каждым из зубцов статора и ротора, с шириной наружной поверхности зубцов, выполненной в зависимости от угла α их взаимного пересечения равной:
- 
где bi - ширина зубца в i-м сечении, bз - ширина зубца в основании ротора, di диаметр ротора в i-м сечении, D - диаметр ротора в его широкой части, α - угол пересечения между зубцами статора и ротора в i-м сечении ускорителя, отличающееся тем, что устройство для встречного разгона состоит из двух ускорителей, направленных суженной стороной навстречу друг другу, причем в поперечном сечении выступающие зубцы выполнены в виде равнобедренной трапеции в расширенной части ротора и статора ускорителя и приближающимися к равнобедренному треугольнику в суженной его части.
2. Устройство по п. 1, отличающееся тем, что ускоритель выполнен в виде двух половин однополосного гиперболоида вращения, направленных горловинами к его центру и соединенных между собой общим валом.
3. Устройство по п. 1, отличающееся тем, что ускоритель выполнен в виде двух прямых круглого сечения конусов с вершинами, направленными навстречу друг к другу и переходящими в центре в цилиндры.
4. Устройство по п. 1, отличающееся тем, что в схеме управления установлен реактор с микроконтроллером и датчиками температуры.
| СПОСОБ УСКОРЕНИЯ НЕЙТРАЛЬНЫХ МИКРОЧАСТИЦ | 2014 |
|
RU2572520C1 |
| US 2013277976 A1, 24.10.2013 | |||
| US 5376827 A, 27.12.1994 | |||
| US 5376827 A, 27.12.1994. | |||

