Заявленное изобретение относится к линейным гравитационным ускорителям и может найти применение в качестве ускорителя элементарных микрочастиц, например атомов, лишенных заряда.
Известен способ ускорения микрочастиц, описанный в патенте RU №2456782 С2, опубл. 20.07.12.
В известном способе микрочастицы предварительно ускоряют до скорости, соответствующей скорости инжекции в спиральный волновод, затем их облучают пучком электронов, инжектированных из электронного ускорителя, электрически их заряжая, и окончательно ускоряют полем бегущего по виткам спирального волновода электрического импульса. При этом микрочастицы должны иметь цилиндрическую форму с острым конусом в головной части, с определенным углом раствора.
Недостаток известного способа ускорения заключается в том, что сам процесс подготовки ускорителя достаточно сложен и имеет ограничения по конфигурации частиц. Кроме того, скорость истечения микрочастиц на выходе ускорителя относительно невелика.
Наиболее близким к предлагаемому способу ускорения микрочастиц и принятым за прототип является способ ускорения микрочастиц, описанный патенте RU 2327877 С1, опубл. 27.06.2008.
В известном способе ускорения разгон нейтральных микрочастиц производится за счет их гравитационного взаимодействия с вращающимися в противоположные стороны выступающими поверхностями зубцов ротора и статора, выполненными в виде винтовых линий, расходящихся от входного отверстия ускорителя к выходному с противоположным шагом с изменением площади пересекающихся поверхностей зубцов по мере расхождения упомянутых винтовых линий.
Достоинством прототипа является относительная простота исполнения, возможность разгона нейтральных микрочастиц до скоростей, соизмеримых со скоростью света, и высокий КПД ускорителя.
Недостаток известного способа состоит в том, что концентрация микрочастиц на выходе невелика, что затрудняет процесс их исследования.
Задачей данного изобретения является повышение концентрации микрочастиц на выходе, снижение расхода исследуемых образцов и, как следствие, повышение КПД ускорителя.
Техническим результатом является создание простых и удобных для применения в различных областях ускорителей, способных обеспечить высокую концентрацию нейтральных элементарных микрочастиц, например атомов.
Технический результат достигается за счет того, что в способе ускорения нейтральных микрочастиц, при котором разгон микрочастиц производится за счет их гравитационного взаимодействия с вращающимися в противоположные стороны выступающими поверхностями зубцов ротора и статора, выполненными в виде винтовых линий, расходящихся от входного отверстия к выходному с противоположным шагом и изменением площади пересекающихся поверхностей зубцов по мере расхождения упомянутых винтовых линий, согласно изобретению поток микрочастиц фокусируют на выходе ускорителя за счет их концентрации по мере перемещения от входа в ускоритель к его выходу.
Фокусирование потока микрочастиц на выходе ускорителя за счет их концентрации по мере перемещения от входа в ускоритель к его выходу позволяет сосредоточить этот поток в определенной точке пространства.
Изобретение иллюстрируется чертежами.
На фиг. 1 изображен поперечный разрез статора и ротора.
На фиг. 2 представлен ротор ускорителя, винтовые пазы которого имеют переменный шаг. Показан только один зубец.
На фиг. 3 нарисован продольный разрез статора, пазы которого имеют переменный шаг. Показан только один зубец.
На фиг. 4 показан продольный разрез ускорителя.
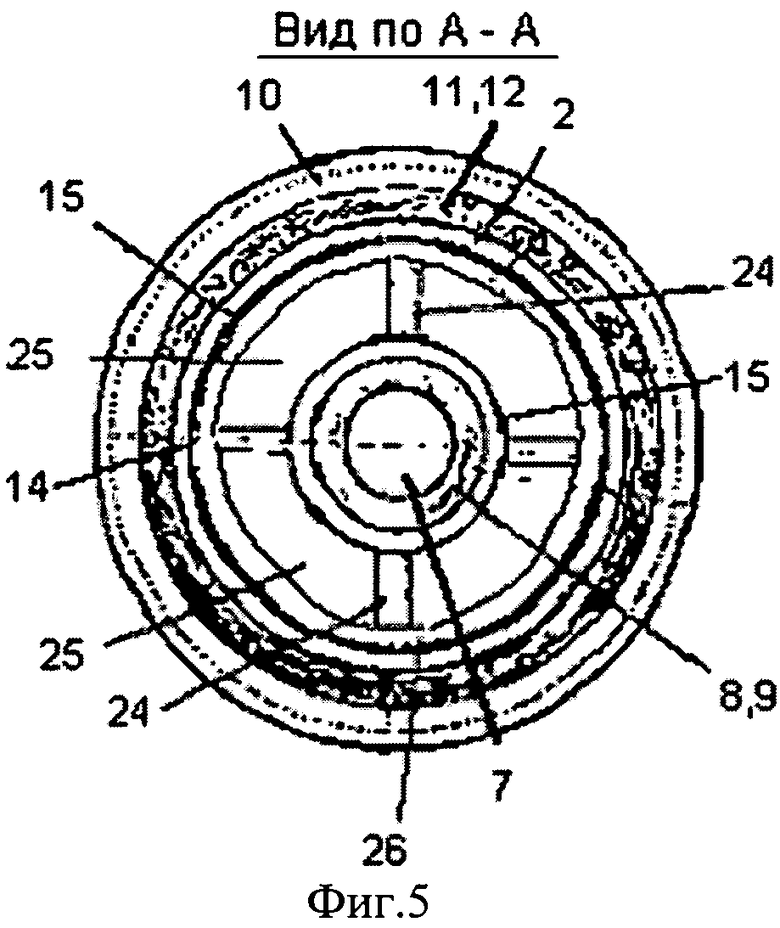
На фиг. 5 дан вид ускорителя со стороны стрелки в сечении по линии А-А (фиг.4).
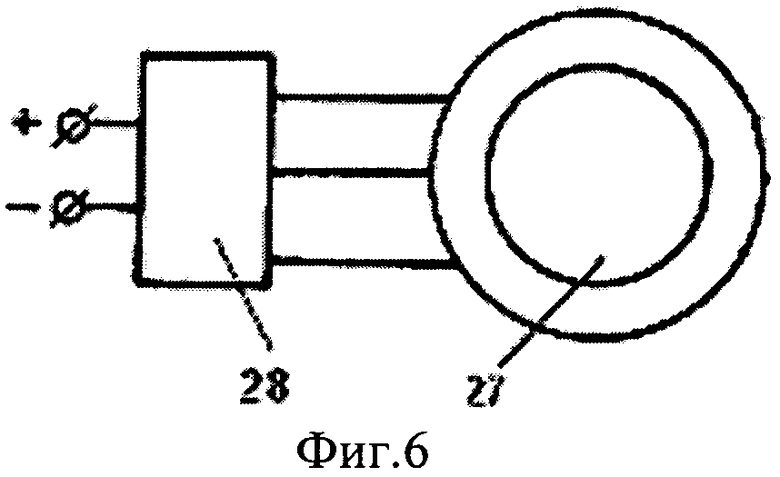
На фиг. 6 представлена принципиальная электрическая схема питания двигателя, приводящего во вращение статор ускорителя.
Линейный гравитационный ускоритель, обеспечивающий указанный способ ускорения нейтральных микрочастиц устроен следующим образом.
Ротор 1 (фиг. 1) установлен внутри статора 2 и имеет зубцы 3, которые в профиль выполнены в форме зубцов якоря машины постоянного тока с углубленным открытым прямоугольным пазом (см. кн. Гольдберг О.Д. и др. Проектирование электрических машин. - М.: Высшая школа, 1984 г., стр.248). Между зубцами ротора 1 имеются прямоугольные открытые пазы 4, профиль которых выполнен в форме открытых прямоугольных пазов якоря машины постоянного тока (см. там же). Зубцы статора 5 в профиль выполнены в форме зубцов статора асинхронной машины с прямоугольным открытым пазом (см. кн. Гольдберг О.Д. и др. Проектирование электрических машин. - М.: Высшая школа, 1984 г., стр.134). Между зубцами 5 статора 2 имеются открытые прямоугольные пазы 6 (прямые каналы), выполненные в форме пазов статора асинхронной машины с углубленными прямоугольными открытыми пазами (см. там же, стр.134). Ширина наружной поверхности зубцов статора и ротора и ширина пазов в любом сечении выполнена одинаковой. Зубцы 3 ротора 1, так же как и зубцы статора, непрерывны, проходят вдоль всей поверхности ротора в продольном направлении. Ротор 1 выполнен в виде прямого, кругового усеченного конуса (фиг. 2), и на фиг. 2 показан только один зубец. Начальная часть конуса является его основанием. Зубцы 3 расположены по резьбе по винтовой линии с шагом, расходящимся от его начала к концу. Шаг винтовых линий в суженной части ротора приближается к бесконечности. Зубцы 5 статора 2 (фиг. 3), так же как и зубцы 3 ротора 1, в продольном направлении расположены по резьбе по винтовой линии в виде шнека или винта с переменным шагом, расходящимся от его начала к концу (на фиг. показан только один виток). Причем направление винтовой линии резьбы статора взаимно противоположно направлению винтовой линии резьбы ротора. Шаг винтовых линий статора и количество витков его резьбы точно такое же, как и у ротора. Шаг резьбы винтовой линии в конце статора, в суженной его части так же как у ротора, приближается к бесконечности. Конструкция предусматривает многозаходный винт. Количество зубцов может достигать двузначного или даже трехзначного числа в зависимости от размеров машины. Ширина зубцов в каждом поперечном сечении статора и ротора принимается одинаковой:

где bi - ширина зубца в i-том сечении, bз - ширина зубца в основании конуса, di - диаметр конуса в i-том сечении, D - диаметр конуса в его основании, α - угол пересечения между зубцами статора и ротора в i-том сечении. И статор 2, и ротор 1 выполнены подвижными. Ротор 1 установлен с возможностью вращения коаксиально с минимальным зазором внутри статора 2 (фиг. 4) и имеет вал 7 с повышенным диаметром, выступающий с одной стороны и снабженный односторонними подшипниками 8 и 9. Статор 2 расположен внутри неподвижной станины 10. Между станиной и статором с двух сторон установлены подшипники 11 и 12. Статор 2 имеет подшипниковые щиты 13 и 14, которые вставлены внутрь статора. Через ступицы 15 и 16 эти щиты сочленены с валом ротора 7 с помощью подшипников соответственно 17 и 18. Щиты содержат обширные окна (на фигуре не показаны), допускающие свободный проход разгоняемых образцов к зазору 19 между статором и ротором. Статор 2 механически сочленен с внешним приводом (на фигуре не показан) с помощью конической передачи 20 с валом 21 для внешнего привода. Вал 7 ротора 1 также сочленен с внешним приводом (на фиг. не показан) с помощью конической передачи 22 с валом 23 для привода. Приводы статора и ротора должны вращать соответственно статор и ротор в разные стороны и с одинаковой скоростью. При этом для вращения статора и ротора может быть применен один общий привод, передающий движение на оба вала с помощью редукторной коробки передач. Вращение ротора и статора должно происходить в разные стороны и с одинаковой скоростью.
Фиг. 5 дает представление о виде ускорителя со стороны стрелки в сечении по линии А-А (фиг. 4), где показаны неподвижная станина 10, подшипники 11, 12 между станиной 10 и подвижным статором 2, подшипниковый щит 14 со ступицей 15 и соединители между ступицей и ободом, выполненные в виде лучей 24. На фигуре видны также подшипники 8, 9, окна 25, зазор 19 и вал 7 ротора 1 и обод 26, расположенный между зазором 19 и лучами 24.
Вращение статора ускорителя от вала 21 осуществляется с помощью асинхронного короткозамкнутого двигателя 27 (фиг. 6), получающего питание от частотного регулятора 28. Последний подключен к источнику постоянного тока. Аналогично производится вращение и ротора 1 ускорителя от вала 23.
Способ ускорения нейтральных микрочастиц действует следующим образом. При вращении ротора 1 внутри подвижного статора 2 (фиг. 4, 5) исследуемые образцы (жидкость или газ) поступают во входные окна 25 и затем проходят через винтовые пазы, образованные пазами статора 2 и ротора 4. Локальные зазоры, сформированные между зубцами статора и ротора, будут линейно и непрерывно с ускорением смещаться в сторону от начала статора и ротора к их концам в суженной части. При этом движение микрочастиц будет формироваться двумя силами. Первая сила образуется за счет шнекового эффекта, при котором частицы, оказавшиеся в пазах, будут двигаться вдоль пазов. Вторая сила образуется за счет того, что частицы благодаря центробежным силам попадают в зазор между зубцами ротора и статора в зоны взаимного пересечения зубцов и оказываются в гравитационной ловушке. Иными словами, микрочастицы образцов, попадающие в зазор 7 между зубцами, взаимодействуют с зубцами по принципу взаимного притяжения согласно формуле:
где m1 - массы микрочастиц исследуемого материала и m2 - массы ротора и статора которые взаимодействуют с частицами с силой Fi; R - расстояние между массами ротора и статора и микрочастицами, y1=6,67384(80)·10-11 м3·с-2·кг-1, или Н·м2·кг-2, универсальная постоянная. Что касается расстояния R, то в предлагаемом ускорителе эта величина неопределенна, поскольку элементы материала находятся во взаимодействии с двумя движущимися параллельно массами, расположенными с двух сторон от микрочастиц, и это расстояние на практике может приближаться к нулю. Во всяком случае, R в сотни и тысячи раз меньше, чем если бы взаимодействие было односторонним.
Площадь зазора между зубцами статора и ротора зависит от угла «α» взаимного пересечения зубцов статора и ротора и диаметра конусного ротора согласно формуле [1]. Максимальные размеры этой площади на входе в ускоритель, где она равна bз 2 при α=90°. По мере перемещения микрочастиц эта площадь постоянно снижается, что приводит к увеличению их концентрации на выходе ускорителя, и будет иметь вид ромба.
Если шаг винтовых пазов статора и ротора на выходе приближен к бесконечности, то скорость истечения микрочастиц будет соразмерна релятивистской скорости, при этом масса частиц будет определяться согласно формуле:

где m0 - масса частиц на входе в ускоритель, m - масса ускоренной частицы, V - скорость ускоренной частицы, с - скорость света.
Согласно формуле [3] взаимодействие между частицами и зубцами ротора и статора по мере их ускорения и приближения к выходному отверстию ускорителя будет усиливаться, при этом концентрация микрочастиц будет возрастать в соответствии с уменьшением диаметра конуса ротора.
Фокус ускорителя будет находиться в вершине конуса, что облегчает выбор места установки мишени, на которую будут направляться микрочастицы.
Скорость V можно регулировать путем изменения числа оборотов статора и ротора. При этом сама скорость вращения статора и ротора может быть относительно невелика, что позволит снизить шум и вибрацию.
В настоящее время многочисленные малые ускорители применяются в медицине (радиационная терапия), а также в промышленности (например, для ионной имплантации в полупроводниках). Таким образом, предлагаемый гравитационный ускоритель может найти самое широкое применение в различных областях науки и техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАВИТАЦИОННЫЙ УСКОРИТЕЛЬ | 2014 |
|
RU2579752C1 |
| УСТРОЙСТВО ДЛЯ ВСТРЕЧНОГО РАЗГОНА НЕЙТРАЛЬНЫХ МИКРОЧАСТИЦ | 2016 |
|
RU2633994C1 |
| СПОСОБ ВСТРЕЧНОГО РАЗГОНА И СТОЛКНОВЕНИЯ НЕЙТРАЛЬНЫХ МИКРОЧАСТИЦ | 2016 |
|
RU2633964C1 |
| ВИНТОВОЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2327877C1 |
| СПОСОБ ДЕЗИНТЕГРИРОВАНИИЯ КУСКОВОГО СЫРЬЯ | 2020 |
|
RU2726897C1 |
| ДИСМЕМБРАТОР | 2018 |
|
RU2683528C1 |
| ДЕЗИНТЕГРАТОР | 2018 |
|
RU2691585C1 |
| СПОСОБ СОЗДАНИЯ ТЯГИ В ВАКУУМЕ И ПОЛЕВОЙ ДВИГАТЕЛЬ ДЛЯ КОСМИЧЕСКОГО КОРАБЛЯ (ВАРИАНТЫ) | 2001 |
|
RU2185526C1 |
| СПОСОБ ДЕЗИНТЕГРИРОВАНИЯ КУСКОВОГО СЫРЬЯ | 2018 |
|
RU2683526C1 |
| Роторно-пульсационное устройство | 2017 |
|
RU2667451C1 |
Изобретение относится к ускорению микрочастиц и может найти применение в качестве ускорителя элементарных частиц, например атомов, лишенных заряда. Технический результат состоит в повышении к.п.д. и снижении расхода исследуемых образцов. Поток микрочастиц фокусируют на выходе ускорителя за счет измененной конфигурации поверхностей ротора и статора. Ротор 1 выполнен в виде прямого, кругового усеченного конуса. При вращении ротора 1 внутри подвижного статора 2 исследуемые образцы (жидкость или газ) поступают во входные окна и через винтовые пазы, образованные пазами статора 2 и ротора 4. Локальные зазоры, сформированные между зубцами статора и ротора, будут линейно и непрерывно с ускорением смещаться в сторону от начала статора и ротора к концу. Движение микрочастиц будет формироваться двумя силами. Первая сила образуется за счет шнекового эффекта, при котором частицы, оказавшиеся в пазах, будут двигаться вдоль пазов. Вторая сила образуется за счет того, что частицы благодаря центробежным силам попадают в зазор между зубцами ротора и статора в зоны взаимного пересечения зубцов и оказываются в гравитационной ловушке. 6 ил.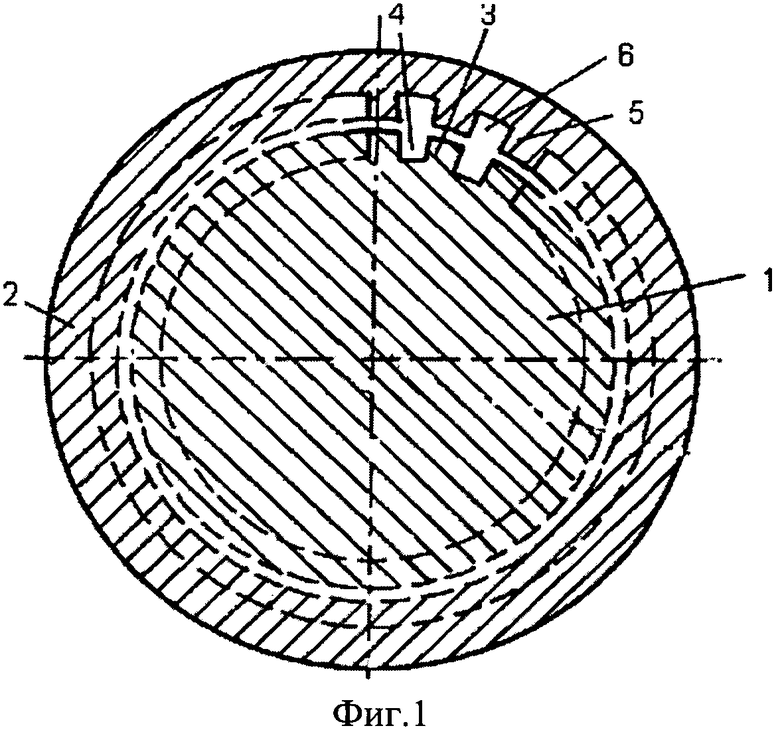
Способ ускорения нейтральных микрочастиц, при котором разгон микрочастиц производится за счет их гравитационного взаимодействия с вращающимися в противоположные стороны выступающими поверхностями зубцов ротора и статора, выполненными в виде винтовых линий, расходящихся от входного отверстия к выходному с противоположным шагом и изменением площади пересекающихся поверхностей зубцов по мере расхождения упомянутых винтовых линий, отличающийся тем, что поток микрочастиц фокусируют на выходе ускорителя за счет их концентрации по мере перемещения от входа в ускоритель к его выходу.
| ВИНТОВОЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2327877C1 |
| МНОГОСТУПЕНЧАТАЯ ОСЕВАЯ И РАДИАЛЬНАЯ ЮНГСТРЕМА ТУРБОМАШИНА БЕЗ ВЫХОДНОГО ВАЛА | 2002 |
|
RU2253737C2 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ КИНОЛЕНТЫ | 1930 |
|
SU29721A1 |
| US 5376827 A, 27.12.1994 | |||
| US 5376827 A, 27.12.1994. | |||

