Изобретение относится к экранопланному транспорту, а именно к системам демпфирования продольных колебаний экраноплана по углу тангажа.
Из уровня техники известны системы демпфирования колебаний летательных аппаратов (самолетов, экранопланов и др.) по углу тангажа.
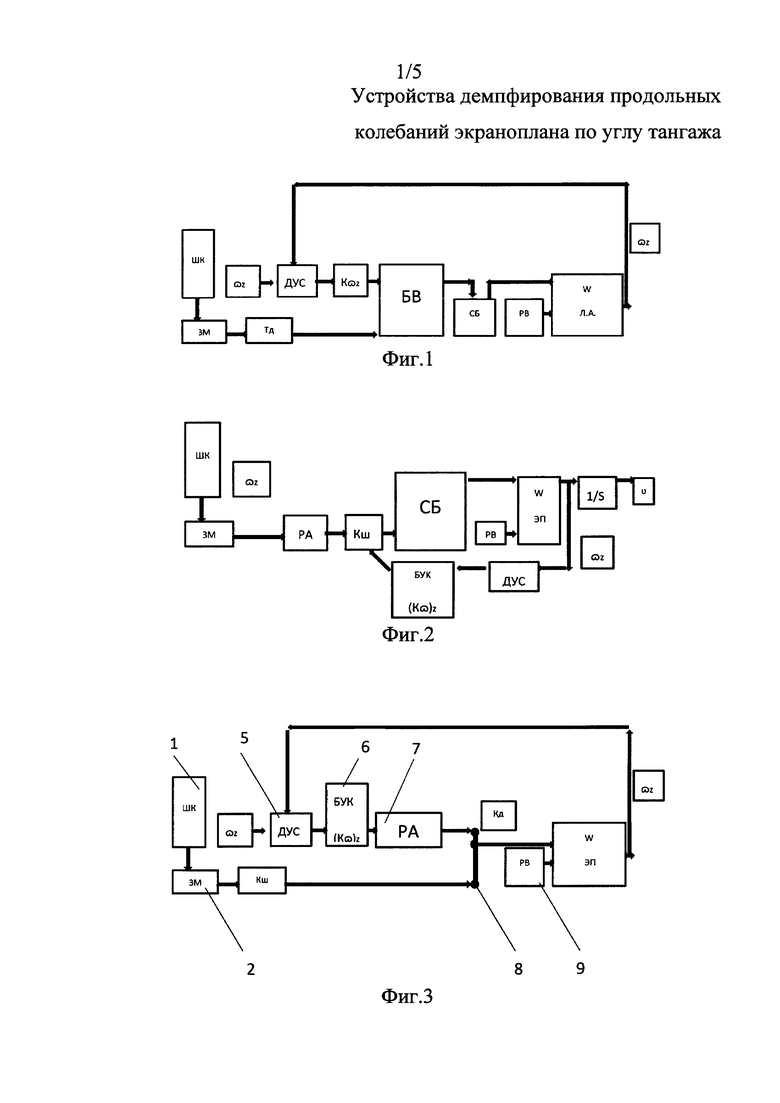
Так, в книге Г.С. Бюшгенс, Р.В. Студнев «Аэродинамика самолета. Динамика продольного и бокового движения», стр. 245, Москва, издательство «Машиностроение», 1979 г. [1], представлено устройство демпфирования продольных колебаний самолета по углу тангажа, содержащее штурвальную колонку (ШК) с загрузочным механизмом (ЗМ), проводку управления с системой качалок, рулевой агрегат, датчик угловой скорости тангажа, блок усиления и контроля (БУ (KωZ)). Особенностью известного устройства, блок-схема которого представлена на фиг. 1, является наличие силового привода (бустера) для отклонения органа управления.
При работе устройства, известного из книги [1], сигнал с тензометрического датчика (ТД), пропорциональный перемещению штурвальной колонки, электронно суммируется в бортовом вычислителе (БВ) с сигналом, поступающим с датчика угловых скоростей (ДУС) и усиленного в блоке усиления и контроля (БУ (KωZ)), после чего суммарный управляющий сигнал поступает на силовой бустер (СБ), где преобразуется в перемещение гидроштока этого бустера. В результате отклонение органа управления - руля высоты (РВ) реализуется по закону управления в виде суммарного воздействия от летчика XЛ=KТД×(XШК) и от работы демпфера тангажа KωZ×ωZ
δPB=KТД×(ХШК)+KωZ×ωZ,
где:
δPB - угол отклонения руля высоты;
KТД - сигнал с тензометрического датчика;
ХШК - ход штурвальной колонки, мм;
KωZ - передаточный коэффициент демпфера тангажа, KωZ>0, сек;
ωZ - угловая скорость изменения угла тангажа летательного аппарата (в данном случае самолета).
Такое управление рулем высоты обладает недостатком, поскольку при отказе работы самого силового бустера (СБ) и (или) запитывающей его системы (гидравлической или электрической) разрывается связь проводки управления от штурвальной колонки к рулю высоты. Для устранения этого недостатка система привода руля высоты от бортового вычислителя (БВ) к рулю высоты через силовой бустер (СБ) приходится многократно дублировать, что увеличивает массу системы управления самолетом.
В книге В.Б. Диомидов «Автоматическое управление движением экранопланов», стр. 82, 83, Санкт-Петербург, издательство СПб ГНЦ РФ ЦНИИ «Электроприбор», 1996 г., (ISNB 5-900780-06-6) [2], известно устройство демпфирования продольных колебаний экраноплана по углу тангажа, содержащее штурвальную колонку (ШК) с загрузочным механизмом (ЗМ), проводку управления с системой качалок, рулевой агрегат управления (РА) в виде «раздвижной тяги», датчик угловой скорости тангажа (ДУС), блок усиления и контроля (БУ (KωZ)). Особенностью устройства, блок-схема которого представлена на фиг. 2, является наличие силового бустера (СБ), отклоняющего руль высоты (РВ) экраноплана, и датчика обратной связи.
При работе известного из книги [2] устройства перемещения штурвальной колонки (ШК) от летчика ХЛ механически суммируется с дополнительным механическим перемещением рулевой агрегат управления (РА), выполненного в виде «раздвижной тяги» ХРА=KωZ×ωZ, после чего через последующие элементы проводки управления (тяги и качалки) отклоняют управляющий элемент силового бустера (СБ). В результате этого перемещение рабочего гидроштока силового бустера (СБ) отклоняет руль высоты (РВ) экраноплана по закону управления:
δРВ=KШ×(ХШК+KωZ×ωZ),
где:
δРВ - угол отклонения руля высоты;
KШ - передаточный коэффициент проводки ручного управления рулем высоты, Кш<0, град./мм;
ХШК - ход штурвальной колонки, мм;
KωZ - передаточный коэффициент демпфера тангажа, KωZ>0, сек;
ωZ - угловая скорость изменения угла тангажа экраноплана, рад/сек.
Недостатком известного из книги [2] устройства является включение в систему управления рулем высоты (РВ) экраноплана силового бустера (СБ), поскольку при отказе работы самого силового бустера (СБ) и (или) запитывающей его системы (гидравлической или электрической) разрывается связь проводки управления от штурвальной колонки к рулю высоты. Для устранения этого недостатка система привода руля высоты от штурвальной колонки к рулю высоты многократно дублируется, что увеличивает массу системы управления экраноплана.
Устройство демпфирования продольных колебаний экраноплана по углу тангажа [2] принято в качестве наиболее близкого аналога изобретения.
Решаемой технической задачей является повышение безопасности эксплуатации экраноплана.
Технический результат изобретения состоит в улучшении характеристик устойчивости и управляемости экранопланом, а также в обеспечении управляемости экраноплана по углу тангажа при выходе из строя рулевого агрегата. Кроме того, технический результат состоит в улучшении эргономичности управления за счет уменьшения частоты и амплитуды отклонения штурвальной колонки при управлении экранопланом.
Сущность изобретения состоит в следующем.
Устройство демпфирования продольных колебаний экраноплана по углу тангажа, как и в наиболее близком аналоге [2], содержит штурвальную колонку с загрузочным механизмом, проводку управления с системой качалок, рулевой агрегат, датчик угловой скорости тангажа, блок усиления и контроля, но в отличие от наиболее близкого аналога [2] рулевой агрегат подключен посредством дифференциальной качалки, кинематически связанной с параллелограммным механизмом, кинематически соединенным со штурвальной колонкой и рулем высоты, при этом сигнал, поступающий с блока усиления и контроля на рулевой агрегат, обеспечивает дополнительное отклонение рулей высоты на угол, равный произведению величин передаточного коэффициента дифференциальной качалки, передаточного коэффициента демпфера тангажа, передаточного коэффициента рулевого агрегата и угловой скорости изменения угла тангажа.
Устройство демпфирования продольных колебаний экраноплана по углу тангажа, характеризующееся тем, что параллелограммный механизм дифференциальной качалки содержит пару коромысел, шарнирно соединенных с опорой и шарнирно соединенных между собой перемычкой, первое коромысло кинематически связано со штурвальной колонкой, второе коромысло соединено с качалкой посредством шарнира, соединяющего второе коромысло с перемычкой, один конец качалки кинематически связан с рулем высоты, а второй конец качалки шарнирно соединен с упругим элементом и штоком рулевого агрегата, при этом другой конец упругого элемента шарнирно соединен с опорой посредством шарнира, соединяющего первое коромысло с опорой.
Устройство демпфирования продольных колебаний экраноплана по углу тангажа характеризуется тем, что рулевой агрегат содержит гидроцилиндр.
Устройство демпфирования продольных колебаний экраноплана по углу тангажа характеризуется тем, что рулевой агрегат содержит силовой электропривод.
Признаки, характеризующие сущность изобретения, являются существенными, образуют совокупность и обеспечивают достижение технического результата.
Действительно, выполнение устройства демпфирования продольных колебаний экраноплана по углу тангажа содержащим штурвальную колонку с загрузочным механизмом, проводку управления с системой тяг и качалок, рулевой агрегат, датчик угловой скорости тангажа, блок усиления и контроля, а также подключение рулевого агрегата в систему управления с помощью дифференциальной качалки, кинематически связанной с параллелограммным механизмом, кинематически соединенным со штурвальной колонкой и рулем высоты, обеспечивает управление экранопланом по углу тангажа. В случае отказа системы силового агрегата, вследствие соединения силового агрегата посредством параллелограммного механизма параллельно с проводкой управления от штурвальной колонки к рулю высоты, сохраняется ручное управление экранопланом со стороны летчика, что по сравнению с рассмотренными ранее устройствами-аналогами повышает безопасность эксплуатации экраноплана. При этом сигнал, поступающий с блока усиления и контроля на рулевой агрегат, обеспечивает дополнительное отклонение руля высоты на угол, равный произведению величин передаточного коэффициента дифференциальной качалки, передаточного коэффициента демпфера тангажа, передаточного коэффициента рулевого агрегата и угловой скорости изменения угла тангажа, что в результате повышает характеристики устойчивости и управляемости экраноплана по углу тангажа и улучшает эргономичность управления за счет уменьшения частоты и амплитуды отклонения штурвальной колонки при управлении экранопланом.
Выполнение параллелограммного механизма дифференциальной качалки содержащим пару коромысел, шарнирно соединенных с опорой и шарнирно соединенных между собой перемычкой, кинематическая связь первого коромысла со штурвальной колонкой, соединение второго коромысла с качалкой посредством шарнира, соединяющего второе коромысло с перемычкой, кинематическая связь одного конца качалки с рулем высоты, шарнирное соединение второго конца качалки с упругим элементом и штоком рулевого агрегата, а также соединение другого конца упругого элемента с опорой посредством шарнира, соединяющего первое коромысло с опорой, обеспечивает независимое друг от друга отклонение руля высоты штурвальной колонкой и рулевым агрегатом, обеспечивает управляемость экраноплана по углу тангажа при выходе из строя рулевого агрегата, а также способствует улучшению эргономичности управления за счет уменьшения частоты и амплитуды отклонения штурвальной колонки при управлении экранопланом.
Выполнение рулевого агрегата содержащим гидроцилиндр повышает быстродействие устройства демпфирования продольных колебаний экраноплана по углу тангажа и тем самым повышает устойчивость и управляемость экранопланом.
Выполнение рулевого агрегата содержащим силовой электропривод повышает точность перемещения штока рулевого агрегата, что способствует улучшению устойчивости и управляемости экранопланом.
Изобретение поясняется чертежами.
На фиг. 1 представлена блок-схема демпфирования продольных колебаний самолета по углу тангажа, представленная в книге [1].
На фиг. 2 представлена блок-схема демпфирования продольных колебаний экраноплана по углу тангажа, представленная в книге [2].
На фиг. 3 представлена блок-схема заявленного устройства демпфирования продольных колебаний экраноплана по углу тангажа.
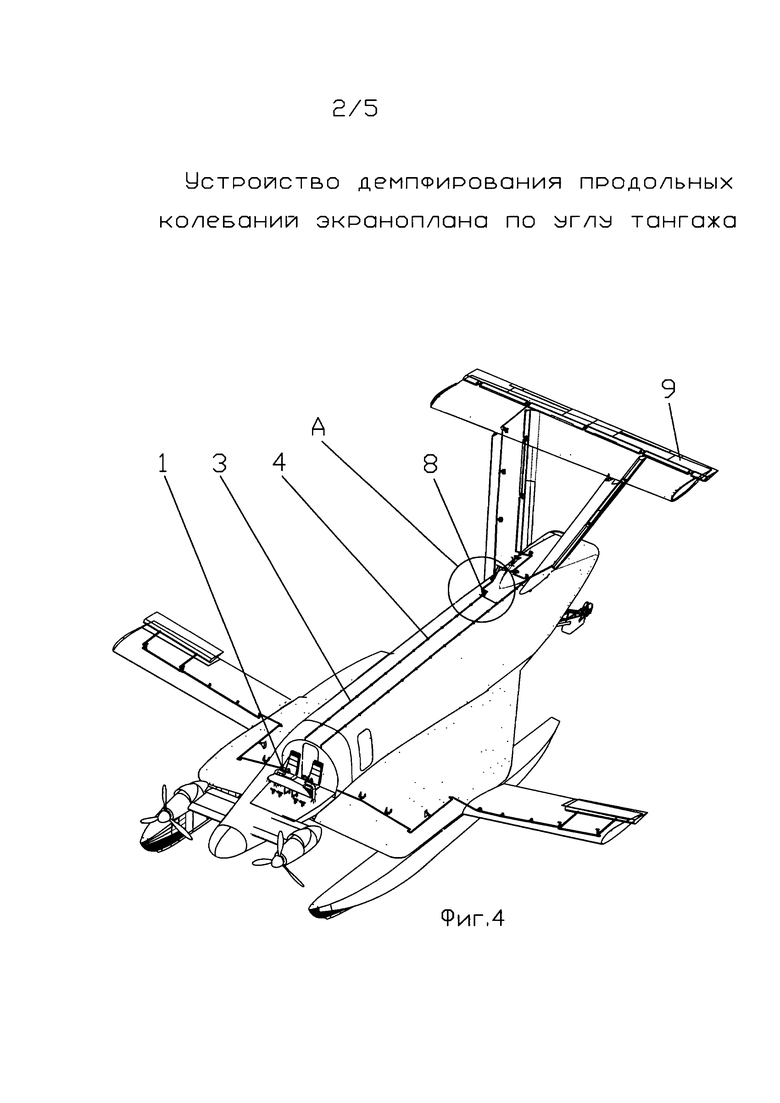
На фиг. 4 показан экраноплан, оснащенный устройством демпфирования продольных колебаний экраноплана по углу тангажа.
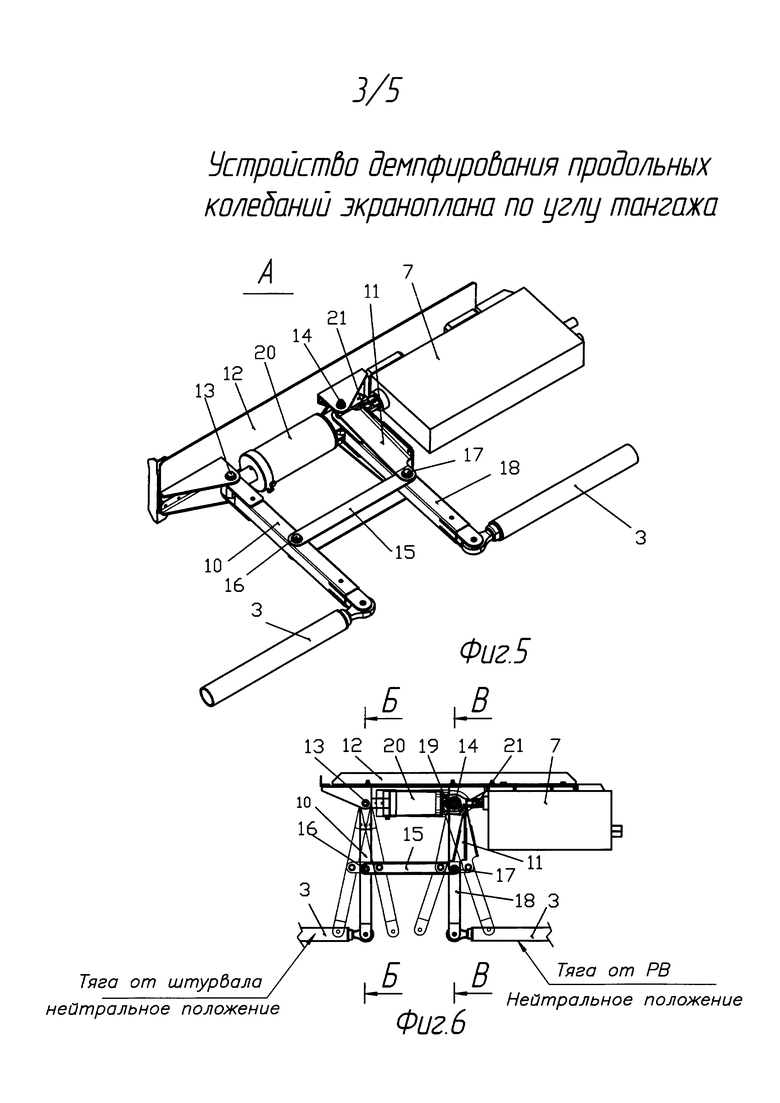
На фиг. 5 показан выносной элемент A на фиг. 4.
На фиг. 6 показан пример выполнения дифференциальной качалки при виде сбоку.
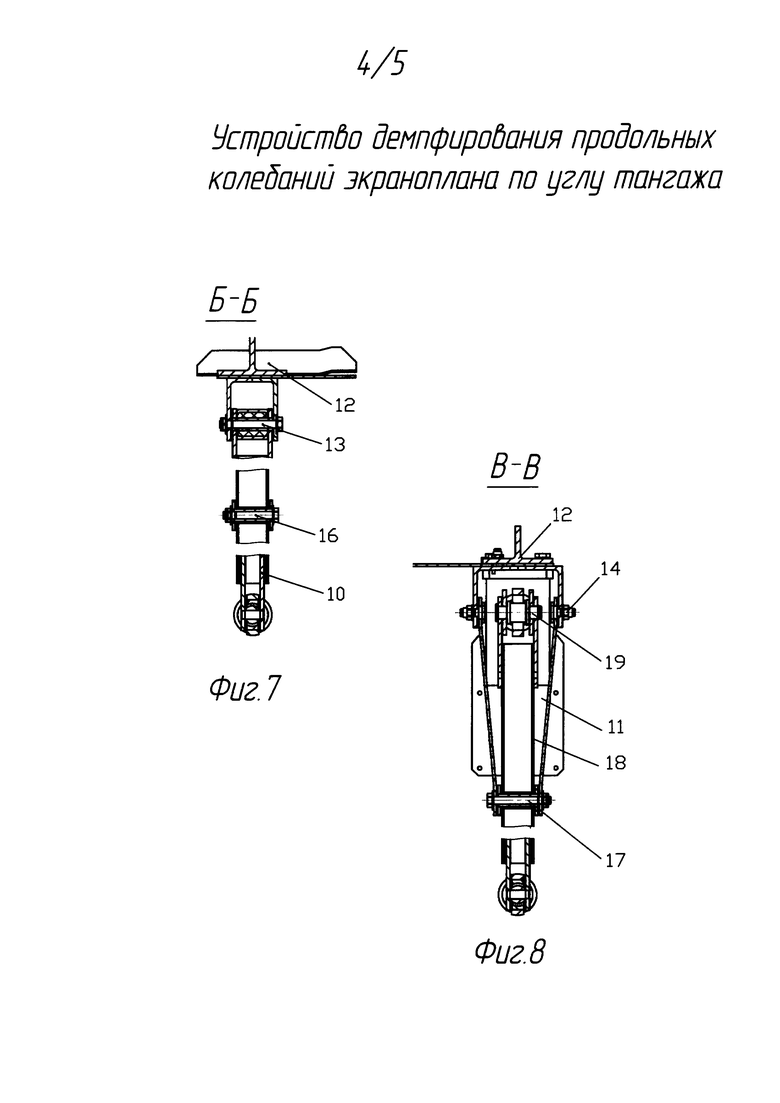
На фиг. 7 показан разрез Б-Б на фиг. 6.
На фиг. 8 показан разрез B-B на фиг. 6.
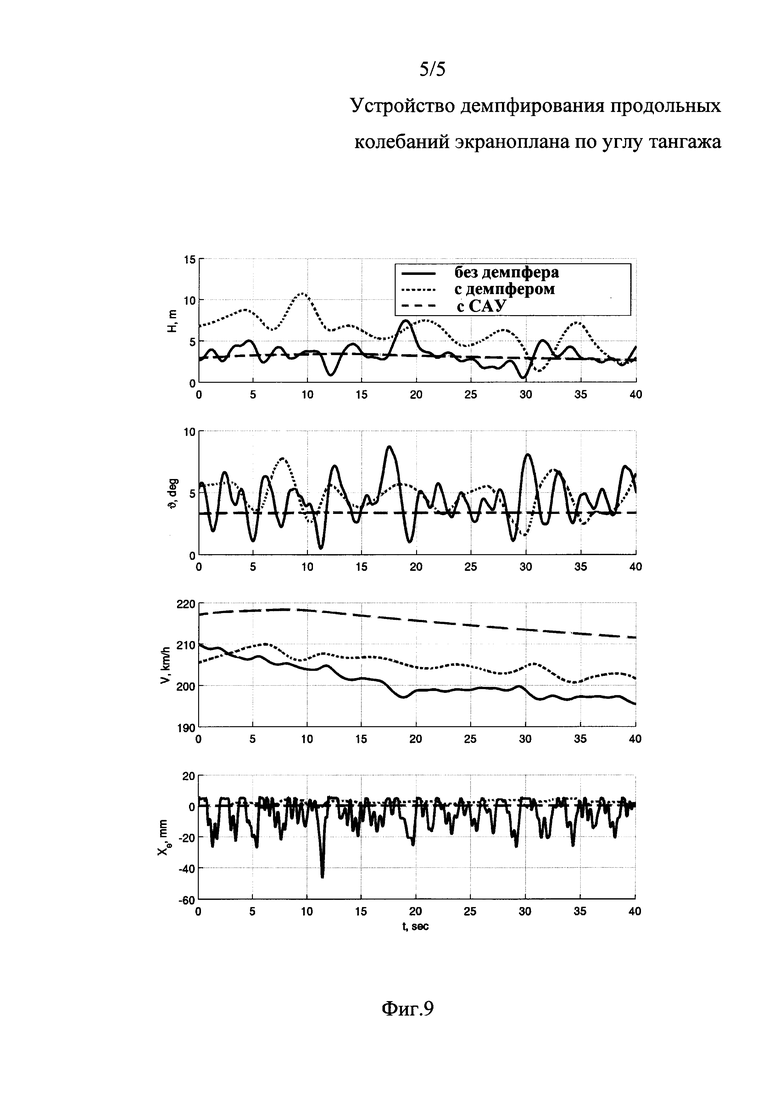
На фиг. 9 представлено сравнение переходных процессов возмущенного движения экраноплана, оснащенного системой демпфирования колебаний по углу тангажа, и без такого устройства.
Устройство демпфирования продольных колебаний экраноплана по углу тангажа выполнено следующим образом.
Устройство демпфирования продольных колебаний экраноплана по углу тангажа содержит штурвальную колонку 1, которая может оснащаться загрузочным механизмом 2, проводку управления, включающую тяги 3 и качалки 4, датчик 5 угловой скорости тангажа (ДУС), блок 6 усиления и контроля (БУК), рулевой агрегат 7 (РА) и дифференциальную качалку 8, кинематически связанную с параллелограммным механизмом, который в свою очередь кинематически связан проводкой управления, включающей тяги 3 и качалки 4, со штурвальной колонкой 1 и рулем высоты 9 (фиг. 3, 4, 5).
Параллелограммный механизм дифференциальной качалки 8, представленный на фиг. 5-8, содержит пару коромысел 10 и 11, соединенных с опорой 12, например, конструкцией экраноплана, посредством шарниров 13 и 14, и соединенных между собой перемычкой 15 посредством шарниров 16 и 17. Первое коромысло 10 кинематически связано проводкой управления, включающей тяги 3 и качалки 4, со штурвальной колонкой 1. Второе коромысло 11 соединено с качалкой 18 посредством шарнира 14, соединяющего второе коромысло 11 с перемычкой 15. Один конец качалки 18 кинематически связан проводкой управления, включающей тяги 3 и качалки 4, с рулем высоты 9, а второй конец качалки 18 посредством шарнира 19 соединен с упругим элементом 20 и выдвижным штоком 21 рулевого агрегата 7. Другой конец упругого элемента 20 соединен с опорой 12, например конструкцией экраноплана, посредством шарнира 13, соединяющего первое коромысло 10 с опорой 12, например, конструкцией экраноплана.
Рулевой агрегат 7 (РА) может выполняться в виде гидроцилиндра, силового электропривода (на фиг. не показано) и другим образом, обеспечивающим перемещение дифференциальной качалки 8.
Устройство демпфирования продольных колебаний экраноплана по углу тангажа работает следующим образом.
Перемещение штурвальной колонки 1 летчиком через проводку управления, включающую тяги 3 и качалки 4, благодаря выполнению дифференциальной качалки 8, кинематически связанной с параллелограммным механизмом, непосредственно отклоняет руль высоты 9 экраноплана (фиг. 4, 5) в режиме ручного управления:
δPB=KШ×ХШК.
При этом датчик 5 угловой скорости угла тангажа (ДУС) вырабатывает сигнал U, пропорциональный угловой скорости ωZ изменения угла тангажа (UωZ), который поступает на блок 6 усиления и контроля (БУК), где преобразуется в сигнал управления U=KωZ×ωZ, поступающий на рулевой агрегат 7 управления (РА). При перемещении штока 21 рулевого агрегата 7 управления (РА) посредством дифференциальной качалки 8, кинематически связанной с параллелограммным механизмом, совмещается с перемещением руля высоты 9 от перемещения штурвальной колонки 1.
В результате реализуется совмещенное отклонение руля высоты 9 экраноплана (ЭП) по закону управления:
δPB=KШ×ХШК+KДК×ХРА=KШ×ХШК+KДК×KРА×(KωZ×ωZ).
Механическое сложение угла отклонения руля высоты 9 от перемещения штурвальной колонки 1 и выдвижного штока 21 рулевого агрегата 7 управления происходит следующим образом.
При перемещении штурвальной колонки 1 посредством тяг 3 и качалок 4 происходит поворот первого коромысла 10 параллелограммного механизма вокруг оси шарнира 13, соединяющего первое коромысло 10 с опорой 12, в качестве которой служит конструкция экраноплана. Первое коромысло 10 перемещает перемычку 15, соединенную с ним шарниром 16. Перемычка 15, посредством шарнира 17 соединенная со вторым коромыслом 11 и качалкой 18, поворачивает второе коромысло 11 относительно шарнира 14, установленного на опоре 12. Одновременно поворачивается качалка 18 относительно оси шарнира 19, соединяющего качалку 18 с выдвижным штоком 21 рулевого агрегата 7 управления и упругим элементом 20, который другим концом соединен с шарниром 13. В результате качалка 18 перемещает тягу 3 на необходимую величину, кинематически связанную с рулем высоты 9.
При совмещении осей шарниров 14 и 19 отклонение руля высоты 9 равно произведению величины передаточного коэффициента KШ от штурвальной колонки 1 до руля высоты 9 на ход ХШК штурвальной колонки 1: δРВ=KШ×ХШК.
При перемещении выдвижного штока 21 рулевого агрегата 7 управления перемещается ось шарнира 19, соединенного также с упругим элементом 20 и качалкой 18. При этом качалка 18 поворачивается относительно оси шарнира 17, соединяющего качалку 18 со вторым коромыслом 11 и перемычкой 15. Качалка 18 перемещает тягу 3, кинематически связанную с рулем высоты 9, на величину ХРА. Величина перемещения ХРА равна произведению величин передаточного коэффициента KРА рулевого агрегата 7 управления, передаточного коэффициента KωZ демпфера тангажа и угловой скорости ωZ изменения угла тангажа экраноплана: ХРА.=KРА×(KωZ×ωZ).
В случае отказа рулевого агрегата 7 управления под действием сил упругости упругого элемента 20 ось шарнира 19 совмещается с осью шарнира 14, и качалка 18 перемещается как одно целое со вторым коромыслом 11 параллелограммного механизма.
Таким образом, при отказе рулевого агрегата 7 управления (РА), благодаря параллельному включению рулевого агрегата 7 в проводку управления рулем высоты 9 посредством дифференциальной качалки 8, кинематически связанной с параллелограммным механизмом, кинематически связанного со штурвальной колонкой и рулем высоты 9, сохраняется ручное управление рулем высоты 9 через проводку управления, включающую тяги 3 и качалки 4, по закону управления: δРВ=KШ×ХШК. В известных устройствах демпфирования самолета и экраноплана по углу тангажа [1, 2] рулевой агрегат в проводку управления от штурвальной колонки до руля высоты включен последовательно, что в случае отказа рулевого агрегата не обеспечивает ручного управления летчиком.
На пилотажном стенде ПСПК-102 ЦАГИ проведены исследования заявленного устройства демпфирования колебаний по углу тангажа на математической модели экраноплана, представленного на фиг. 4. На представленных на фиг. 9 графиках переходные процессы экраноплана без устройства демпфирования продольных колебаний по углу тангажа обозначены как «без демпфера», с устройством демпфирования обозначены как «с демпфером», и с системой автоматического управления обозначены как «с САУ».
Исследования показали, что при включении в систему управления заявленного устройства демпфирования переходные процессы при возмущенном продольном движении по сравнению с ручным управлением без устройства демпфирования имеют лучшие характеристики как по углу тангажа ϑ, так и высоте H, за счет некоторого увеличения высоты полета, что особенно важно для экраноплана. Также значительно улучшается управляемость экраноплана, что выражается в уменьшении хода ХШК штурвальной колонки 1, при этом величина хода ХШК штурвальной колонки 1 становится сопоставимой с величиной хода ХШК штурвальной колонки 1 при управлении экранопланом, оснащенным системой автоматического управления.
Степень раскрытия в описании изобретения достаточна для разработки и изготовления устройства демпфирования продольных колебаний экраноплана по углу тангажа на специализированном предприятии. Изобретение соответствует условию патентоспособности «промышленная применимость».
Достижение указанных выше технических результатов при работе всей совокупности существенных признаков, указанных в формуле изобретения, позволяет утверждать, что предложение соответствует критерию патентоспособности «изобретательский уровень».
Перечень позиций и обозначений
1 - штурвальная колонка (ШК);
2 - загрузочный механизм (ЗМ);
3 - тяга проводки управления;
4 - качалка проводки управления;
5 - датчик угловой скорости тангажа (ДУС);
6 - блок усиления и контроля (БУК);
7 - рулевой агрегат (РА);
8 - дифференциальная качалка;
9 - руль высоты;
10 - первое коромысло параллелограммного механизма;
11 - второе коромысло параллелограммного механизма;
12 - опора;
13 - шарнир, соединяющий первое коромысло 10 с опорой 12;
14 - шарнир, соединяющий второе коромысло 11 с опорой 12;
15 - перемычка;
16 - шарнир, соединяющий перемычку 15 с первым коромыслом 10;
17 - шарнир, соединяющий перемычку 15 со вторым коромыслом 11;
18 - качалка;
19 - шарнир, соединяющий качалку 18 с упругим элементом 20;
20 - упругий элемент;
21 - выдвижной шток рулевого агрегата 7;
δРВ - угол отклонения руля высоты;
KШ - передаточный коэффициент от штурвальной колонки 1 до руля высоты 9, KШ<0 град/мм;
XШК - ход штурвальной колонки 1, мм;
KДК - передаточный коэффициент дифференциальной качалки 8, KДК>0, безразмерная величина;
KРА - передаточный коэффициент рулевого агрегата 7;
KωZ - передаточный коэффициент демпфера тангажа, KωZ>0, сек;
ωZ - угловая скорость изменения угла тангажа экраноплана;
KТД - сигнал с тензометрического датчика;
ϑ - угол тангажа экраноплана;
H - высота полета экраноплана;
V - скорость полета экраноплана;
Xe - ход штурвальной колонки 1 экраноплана.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ ДВИЖЕНИИ ЛЕГКОГО ЭКРАНОПЛАНА | 2000 |
|
RU2180131C1 |
| УСТРОЙСТВО ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ ДВИЖЕНИИ ЛЕГКОГО ЭКРАНОПЛАНА | 2001 |
|
RU2225636C2 |
| Способ управления рулём высоты самолёта | 2017 |
|
RU2681509C1 |
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТА | 1994 |
|
RU2089447C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СТАБИЛИЗИРУЕМЫМ ПАРАМЕТРОМ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2208243C1 |
| УНИВЕРСАЛЬНЫЙ ТРЁХКООРДИНАТНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2021 |
|
RU2794218C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2010 |
|
RU2461493C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЗАХОДОМ НА ПОСАДКУ | 1991 |
|
RU1823356C |
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ УЧЕБНО-ТРЕНИРОВОЧНОГО САМОЛЕТА | 1993 |
|
RU2093419C1 |
Изобретение относится к экранопланному транспорту и касается системы демпфирования продольных колебаний экраноплана по углу тангажа. Устройство демпфирования содержит штурвальную колонку с загрузочным механизмом, проводку управления с системой тяг и качалок, рулевой агрегат, датчик угловой скорости тангажа, блок усиления и контроля. При этом рулевой агрегат подключен посредством дифференциальной качалки, кинематически связанной с параллелограммным механизмом, кинематически связанным со штурвальной колонкой и рулем высоты. Сигнал, поступающий с блока усиления и контроля на рулевой агрегат, обеспечивает дополнительное отклонение рулей высоты на угол, равный произведению величин передаточного коэффициента дифференциальной качалки, передаточного коэффициента демпфера тангажа, передаточного коэффициента рулевого агрегата и угловой скорости изменения угла тангажа. Достигается улучшение характеристик устойчивости и управляемости экранопланом, обеспечение управляемости экраноплана по углу тангажа при выходе из строя рулевого агрегата, улучшение эргономичности управления за счет уменьшения частоты и амплитуды отклонения штурвальной колонки при управлении экранопланом. 3 з.п. ф-лы, 9 ил.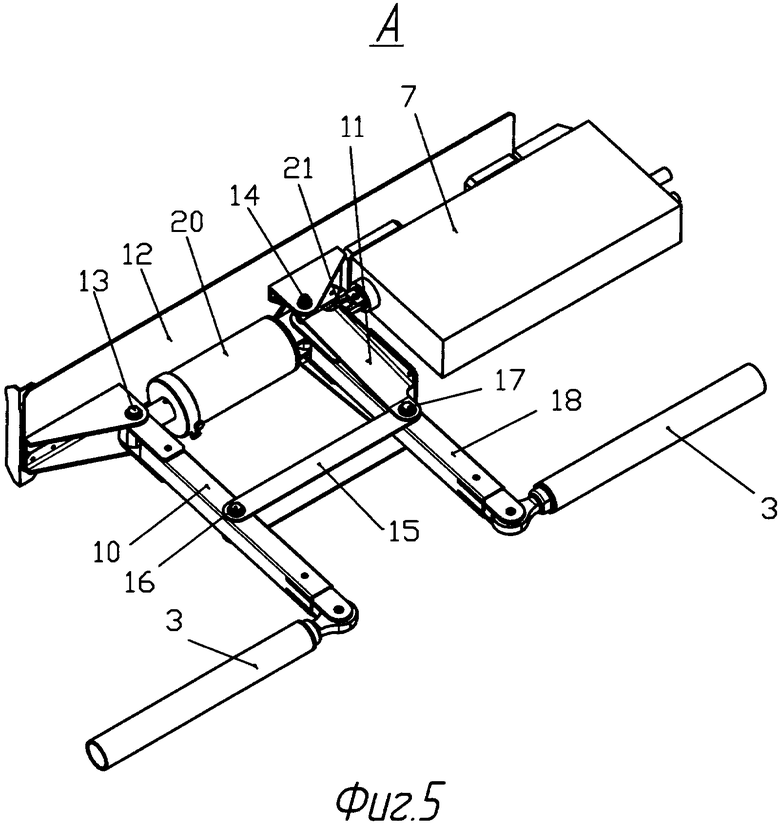
1. Устройство демпфирования продольных колебаний экраноплана по углу тангажа, содержащее штурвальную колонку с загрузочным механизмом, проводку управления с системой тяг и качалок, рулевой агрегат, датчик угловой скорости тангажа, блок усиления и контроля, отличающееся тем, что рулевой агрегат подключен посредством дифференциальной качалки, кинематически связанной с параллелограммным механизмом, кинематически связанным со штурвальной колонкой и рулем высоты, при этом сигнал, поступающий с блока усиления и контроля на рулевой агрегат, обеспечивает дополнительное отклонение рулей высоты на угол, равный произведению величин передаточного коэффициента дифференциальной качалки, передаточного коэффициента демпфера тангажа, передаточного коэффициента рулевого агрегата и угловой скорости изменения угла тангажа.
2. Устройство демпфирования продольных колебаний экраноплана по углу тангажа по п.1, отличающееся тем, что параллелограммный механизм дифференциальной качалки содержит пару коромысел, шарнирно соединенных с опорой и шарнирно соединенных между собой перемычкой, первое коромысло кинематически связано со штурвальной колонкой, второе коромысло соединено с качалкой посредством шарнира, соединяющего второе коромысло с перемычкой, один конец качалки кинематически связан с рулем высоты, а второй конец качалки шарнирно соединен с упругим элементом и выдвижным штоком рулевого агрегата, при этом другой конец упругого элемента шарнирно соединен с опорой посредством шарнира, соединяющего первое коромысло с опорой.
3. Устройство демпфирования продольных колебаний экраноплана по углу тангажа по п.1 или 2, отличающееся тем, что рулевой агрегат содержит гидроцилиндр.
4. Устройство демпфирования продольных колебаний экраноплана по углу тангажа по п.1 или 2, отличающееся тем, что рулевой агрегат содержит силовой электропривод.
| RU 2000250 C, 07.09.1993 | |||
| RU 2012126594 A, 10.01.2014 | |||
| US 4471439 A, 11.09.1984. |

