Изобретение относится к системам автоматического регулирования полета и может быть использовано для уменьшения отклонения высоты полета экраноплана от балансировочного значения, а также для сокращения времени переходных процессов экраноплана по углу тангажа и высоте.
Известен способ двухканального управления продольным движением экранопланов (Диомидов В. Б. Автоматическое управление движением экранопланов.- СПб. ГНЦ РФ -ЦНИИ "Электроприбор", 1996) -[1, стр. 86]. Он включает в себя измерение текущего угла тангажа, угловой скорости, высоты полета, вертикальной скорости и формирование управляющих сигналов, пропорциональных данным величинам, которые подаются на исполнительные устройства - приводы руля высоты и закрылков.
Также известно устройство двухканального управления продольным движением экраноплана при помощи канала руля высоты и канала закрылков [1, стр.174 ]. Оно содержит в себе датчик угла для получения значения угла тангажа, датчик угловой скорости для определения угловой скорости ωZ, радиовысотомер для получения сигнала H, пропорционального высоте полета над подстилающей поверхностью, усилители для формирования управляющих сигналов и рулевые агрегаты, воздействующие на руль высоты и закрылки соответственно.
Известные способ управления продольным движением экраноплана и устройство для его реализации применимы в основном на экранопланах больших размеров, полет которых осуществляется на достаточно больших высотах. Вследствие того что погрешность измерения текущей высоты полета радиовысотомерами, предназначенными для экранопланов, составляет около 0,1 м в диапазоне высот 0-15 м (Небылов А. В. Измерение параметров полета вблизи морской поверхности, СПбГААП. СПб., 1994) -[2, стр. 79], то такая погрешность измерения неприемлема для легких экранопланов, летающих на высотах 0,3-1 м над поверхностью. Двухканальная схема управления не всегда приемлема, так как у легких экранопланов могут отсутствовать закрылки, предназначенные для непосредственного управления высотой полета (обладающие возможностью отклоняться в противоположные направления от нейтрального). Введение двухканальной схемы управления также ограничивается и требованиями массогабаритных показателей для легких экранопланов.
Для сравнительного анализа с заявляемым изобретением принят способ автономного управления угловым движением самолета, включающий в себя измерение угла тангажа, угловой скорости и углового ускорения относительно оси OZ и формирование управляющих сигналов, пропорциональных измеренным значениям, подаваемым на привод руля высоты (Бортовые системы управления полетом /под ред. Ю. В. Байбородина - М.: Транспорт, 1975) -[3, стр. 254].
Известно также устройство одноканального управления угловым движением тангажа (использовалось в автопилоте АП-15Т), содержащее датчик угла тангажа, выход которого соединен с первым входом сумматора, датчик угловой скорости, соединенный со вторым входом сумматора, датчик углового ускорения, подключенный к третьему входу сумматора, последовательно соединенные усилитель, вход которого соединен с выходом сумматора, и рулевой агрегат [3, стр. 254].
Указанные способ и устройство одноканального управления продольным движением можно непосредственно применить и на легком экраноплане. При этом в силу собственного свойства экраноплана возвращаться к опорной высоте полета будет косвенно осуществляться и стабилизация опорной высоты, значение которой однозначно определяется скоростью полета и балансировочным отклонением руля высоты. Но при этом способе и устройстве управления будут достаточно большие отклонения экраноплана от опорной высоты полета и балансировочного значения угла тангажа под действием возмущений. Уменьшить отклонения экраноплана от балансировочной (опорной) высоты полета и балансировочного значения угла тангажа под действием возмущений можно, не меняя структуру автопилота, увеличением коэффициента демпфирования экраноплана относительно поперечной оси. В этом случае возмущения, действующие относительно поперечной оси (удар волны), не вызовут большого отклонения угла тангажа относительно балансировочного положения, а поэтому и экраноплан мало отклонится от опорной высоты полета, так как вертикальная скорость при этом в силу соотношения  будет достаточно мала. Но при наличии большого демпфирования относительно поперечной оси экраноплан будет медленнее возвращаться к балансировочному значению угла тангажа. Следовательно, более длительное время будет существовать вертикальная скорость центра масс экраноплана
будет достаточно мала. Но при наличии большого демпфирования относительно поперечной оси экраноплан будет медленнее возвращаться к балансировочному значению угла тангажа. Следовательно, более длительное время будет существовать вертикальная скорость центра масс экраноплана  что вызовет большее отклонение экраноплана по высоте после окончания действия возмущения. Для уменьшения отклонения экраноплана по высоте после прекращения действия возмущения на этапе возвращения экраноплана к балансировочному значению угла тангажа желательно иметь меньшее значение коэффициента демпфирования.
что вызовет большее отклонение экраноплана по высоте после окончания действия возмущения. Для уменьшения отклонения экраноплана по высоте после прекращения действия возмущения на этапе возвращения экраноплана к балансировочному значению угла тангажа желательно иметь меньшее значение коэффициента демпфирования.
Ставится задача уменьшения отклонения от опорной высоты полета и балансировочного значения угла тангажа под действием возмущения и сокращения времени возвращения экраноплана на опорную высоту полета и к балансировочному значению угла тангажа по окончании действия возмущения путем формирования сигнала нелинейного управления.
Поставленная задача достигается тем, что по способу, по которому производят измерение угла тангажа, угловой скорости и углового ускорения относительно оси OZ, формирование управляющих сигналов, пропорциональных тангажу, угловой скорости относительно оси OZ и углового ускорения, суммирование управляющих сигналов с последующим преобразованием полученного сигнала в угловое перемещение руля высоты, дополнительно формируют нелинейный сигнал управления. Значение коэффициента демпфирования в нелинейном сигнале управления зависит от знака и значения угла тангажа, знака и значения угловой скорости. Таким образом, коэффициент демпфирования является переменным и его изменение осуществляется по закону
i
где iω- расчетное значение коэффициента демпфирования в линейной системе, ωz- угловая скорость;
где М - некоторый постоянный коэффициент; ϑ- текущее значение угла тангажа.
Коэффициент демпфирования принимает свое максимальное значение при возрастании угла тангажа (угол тангажа и угловая скорость относительно поперечной оси имеют один знак). С началом возвращения угла тангажа к балансировочному значению коэффициент демпфирования ступенчато изменяется и уменьшается пропорционально отклонению угла тангажа от балансировочного значения. Это позволяет не допустить больших отклонений высоты полета экраноплана от опорной высоты и значений угла тангажа от балансировочного значения, а также сократить время переходного процесса по высоте и углу тангажа.
Устройство управления продольным движением экраноплана содержит датчик угла тангажа, выход которого соединен с первым входом первого сумматора, датчик угловой скорости, датчик углового ускорения, соединенный с третьим входом первого сумматора, рулевой агрегат, вход которого соединен с выходом первого сумматора. Дополнительно введен блок формирования нелинейного управляющего сигнала, первый вход которого соединен с выходом датчика угла тангажа, второй вход соединен с выходом датчика угловой скорости и выход которого соединен со вторым входом первого сумматора, содержащий последовательно соединенные блок вычисления модуля, блок усиления и второй блок умножения с релейным блоком, первый блок умножения, инвертор, вход которого соединен с выходом первого блока умножения, первый и второй вход которого соединены соответственно с выходами блока усиления и релейного блока, первый вход третьего блока умножения соединен с выходом инвертора, выход третьего блока умножения соединен с первым входом второго сумматора, второй вход которого соединен со вторым входом третьего блока умножения и вторым входом второго блока умножения, являющимися вторым входом блока формирования нелинейного управляющего сигнала, первым входом блока формирования нелинейного управляющего сигнала является вход блока вычисления модуля, соединенный с первым входом второго блока умножения, а выходом блока формирования нелинейного управляющего сигнала является выход второго сумматора.
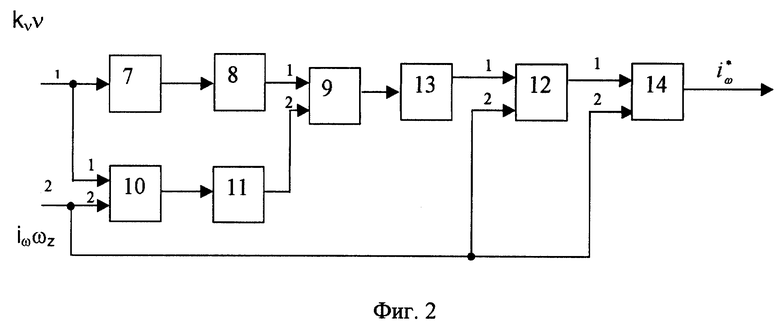
Сущность изобретения поясняется на фиг.1 и 2. На фиг.1 представлена блок-схема устройства для управления продольным движением экраноплана; на фиг.2 - блок-схема реализации блока формирования нелинейного управляющего сигнала.
Устройство содержит:
1 - датчик угла тангажа;
2 - датчик угловой скорости;
3 - датчик углового ускорения;
4 - блок формирования нелинейного управляющего сигнала;
5 - первый сумматор;
6 - рулевой агрегат.
Приняты следующие обозначения:
kνν - сигнал, снимаемый с датчика угла тангажа 1;
iωωZ- сигнал, снимаемый с датчика угловой скорости 2;
kaaz - сигнал, снимаемый с датчика углового ускорения 3;
ϕB- угол поворота руля высоты.
Выход датчика угла тангажа 1 и выход датчика углового ускорения 3 соответственно соединены с первым и третьим входами первого сумматора 5. Первый и второй вход блока формирования нелинейного управляющего сигнала 4 соединены с выходами датчика угла тангажа 1 и датчика угловой скорости 2 соответственно. Выход блока формирования нелинейного управляющего сигнала 4 соединен со вторым входом первого сумматора 5. Выход первого сумматора 5 соединен с входом рулевого агрегата 6.
Блок формирования нелинейного управляющего сигнала (фиг.2) содержит:
7 - блок вычисления модуля;
8 - блок усиления;
9 - первый блок умножения;
10 - второй блок умножения;
11 - релейный блок;
12 - третий блок умножения;
13 - инвертор;
14 - второй сумматор.
Блок формирования нелинейного управляющего сигнала содержит последовательно соединенные блок вычисления модуля 7, блок усиления 8 и второй блок умножения 10 с релейным блоком 11, первый блок умножения 9, инвертор 13, вход которого соединен с выходом первого блока умножения 9, первый и второй вход которого соединены соответственно с выходами блока усиления 8 и релейного блока 11, первый вход третьего блока умножения 12 соединен с выходом инвертора 13, выход третьего умножения 12 соединен с первым входом второго сумматора 14, второй вход которого соединен со вторым входом третьего блока умножения 12 и вторым входом второго блока умножения 10, являющимися вторым входом блока формирования нелинейного управляющего сигнала 4, первым входом блока формирования нелинейного управляющего сигнала 4 является вход блока вычисления модуля 7, соединенный с первым входом второго блока умножения 10, а выходом блока формирования нелинейного управляющего сигнала 4 является выход второго сумматора 14.
Работа устройства происходит следующим образом. При появлении возмущения, действующего относительно оси OZ экраноплана, появляется угловая скорость ωZ. Сигнал, пропорциональный угловой скорости ωZ, снимается с выхода датчика 2 и поступает на второй вход блока формирования нелинейного управляющего сигнала 4. Действие возмущения будет вызывать и отклонение угла тангажа от балансировочного значения. Сигнал с выхода датчика 1, пропорциональный отклонению угла тангажа от балансировочного значения, поступает на первый вход первого сумматора 5 и на первый вход блока формирования нелинейного управляющего сигнала 4. При наличии углового ускорения датчиком 3 формируется сигнал, поступающий на третий вход первого сумматора 5. Блок формирования нелинейного управляющего сигнала 4 формирует сигнал вида
i
iω- расчетное значение коэффициента демпфирования в линейной системе, ωZ- угловая скорость
где М - некоторый постоянный коэффициент; ϑ- текущее значение угла тангажа.
Формирование нелинейного управляющего сигнала происходит следующим образом. Сигнал, пропорциональный текущему значению угловой скорости, со второго входа блока формирования нелинейного управляющего сигнала 4 поступает на второй вход второго блока умножения 10, второй вход третьего блока умножения 12 и на второй вход второго сумматора 14. Сигнал, пропорциональный углу тангажа, поступает на вход блока вычисления модуля 7 и первый вход второго блока умножения 10. Вычисленный модуль текущего значения угла тангажа с выхода блока 7 поступает через блок усиления 8 на первый вход первого блока умножения 9. С выхода второго блока умножения 10 произведение сигналов, пропорциональных текущим значениям угла тангажа и угловой скорости, поступает на вход релейного блока 11. Релейный блок 11 формирует сигнал, равный либо нулевому, либо единичному значению, в зависимости от знаков текущих значений угла тангажа и угловой скорости. С выхода релейного блока 11 сигнал поступает на второй вход первого блока умножения 9. В зависимости от значения сигнала на выходе релейного блока 11 коэффициент К на выходе первого блока умножения 9 принимает либо нулевое значение, либо значение, пропорциональное текущему значению угла тангажа. С выхода первого блока умножения 9 через инвертор 13 сигнал поступает на первый вход третьего блока умножения 12. С выхода третьего блока умножения 12 сигнал поступает на первый вход второго сумматора 14. С выхода второго сумматора 14 сформированный управляющий сигнал поступает на второй вход первого сумматора 5.
На первом сумматоре 5 происходит суммирование поступающих со своими коэффициентами усиления управляющих сигналов. С выхода первого сумматора полученный сигнал поступает на вход рулевого агрегата 6. Рулевой агрегат непосредственно воздействует на руль высоты и отклоняет его в направлении противодействия внешнему возмущению.
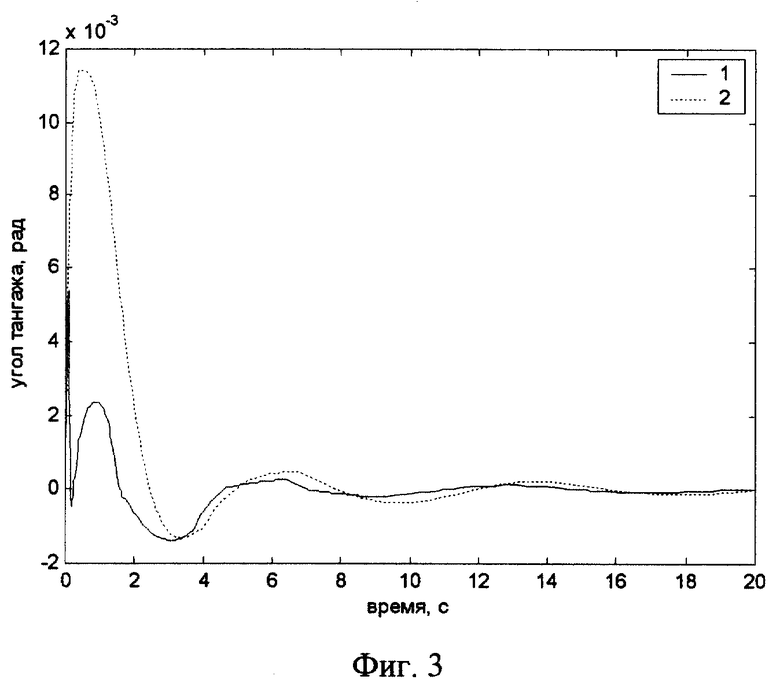
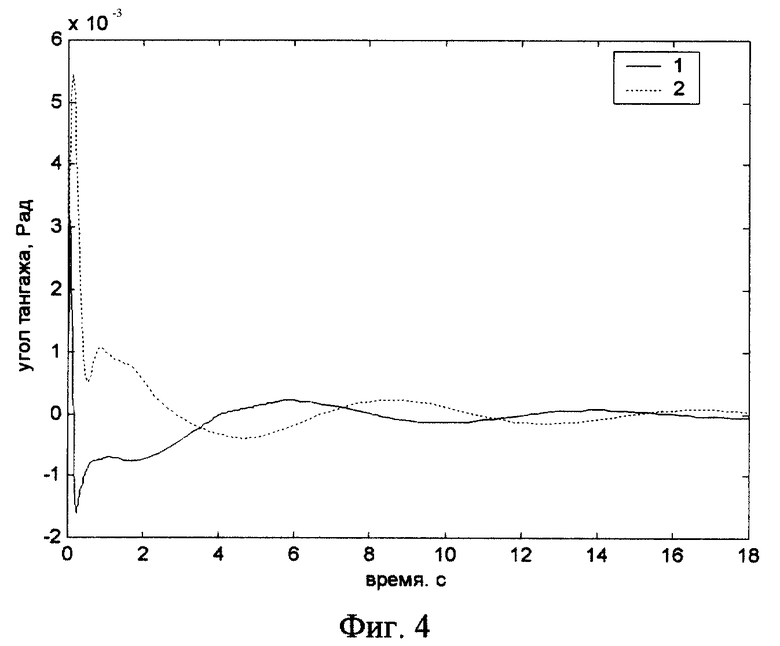
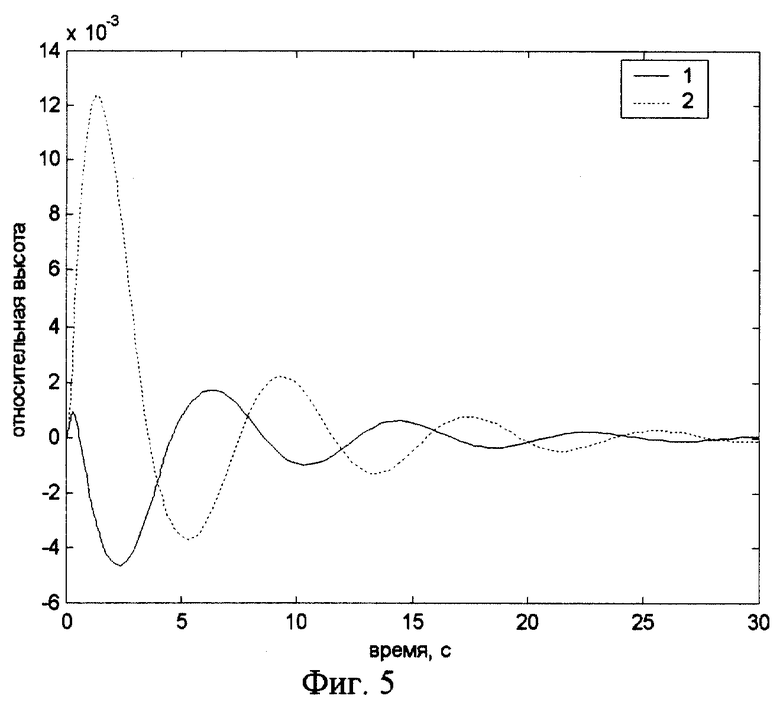
Таким образом, способ управления продольным движением экраноплана и устройство для его осуществления уменьшают отклонение экраноплана от опорной высоты, вызванное действием возмущения и сокращают время возврата к опорной высоте полета за счет введения нелинейного управления коэффициентом демпфирования. Это утверждение подтверждается графиками переходных процессов, представленными на фиг. 3, 5. Эти графики получены в результате математического моделирования системы "Экраноплан - Система Управления" с привлечением ЭВМ. В качестве типовых возмущающих воздействий приняты удар волны и вертикальный ветер. На фиг.3 представлено изменение значения угла тангажа при воздействии вертикальной скорости 5 м/с. Цифрой 1 обозначен переходный процесс при использовании блока формирования нелинейного управляющего сигнала, а цифрой 2 обозначен переходный процесс при линейном способе управления. Явно видно уменьшение отклонения значения угла тангажа от балансировочного значения в случае применение блока формирования нелинейного управляющего сигнала. При использовании блока формирования нелинейного управляющего сигнала отклонение угла тангажа от балансировочного значения уменьшается более чем в два раза. При возмущении в виде вертикального порыва ветра со скоростью 5 м/с переходный процесс по относительной высоте полета при использовании блока формирования нелинейного управляющего сигнала не имеет существенного отличия от переходного процесса при использовании линейной системы управления. На фиг.4 представлены переходные процессы по тангажу при воздействии возмущения в виде угловой скорости 5 град/с. Угловая скорость характеризует удар экраноплана о водную поверхность. Цифрой 1 обозначен переходный процесс при использовании блока формирования нелинейного управляющего сигнала, а цифрой 2 обозначен переходный процесс при линейном способе управления. Заметно как уменьшение отклонения под действием возмущения, так и сокращение времени возврата на углы, близкие к балансировочному значению при использовании блока формирования нелинейного управляющего сигнала. На фиг.5 представлены переходные процессы по относительной высоте полета при воздействии возмущения в виде угловой скорости 5 град/с. Цифрой 1 обозначен переходный процесс при использовании блока формирования нелинейного управляющего сигнала, а цифрой 2 обозначен переходный процесс при линейном способе управления. При использовании блока формирования нелинейного управляющего сигнала уменьшается как отклонение под действием возмущения, так и сокращение времени возврата к опорной высоте полета.
Устройство включает в себя простые в реализации схемы, состоящие из общедоступных элементов, и характеризуется малыми габаритными размерами и небольшим энергопотреблением.
Данный способ может применяться не только на легких экранопланах, но и на летательных аппаратах при управлении угловым движением и высотой полета, где также будет эффективным введение блока формирования нелинейного управляющего сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ ДВИЖЕНИИ ЛЕГКОГО ЭКРАНОПЛАНА | 2001 |
|
RU2225636C2 |
| УСТРОЙСТВО ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕГКОГО ЭКРАНОПЛАНА | 2002 |
|
RU2231104C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СТАБИЛИЗИРУЕМЫМ ПАРАМЕТРОМ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2208243C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289839C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕГКОГО САМОЛЕТА | 2000 |
|
RU2176812C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
| СПОСОБ УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289838C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |
| СПОСОБ ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2007 |
|
RU2344460C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335008C1 |
Изобретение относится к системам автоматического управления полетом летательных аппаратов. Технический результат заключается в уменьшении отклонения от опорной высоты полета и балансировочного значения угла тангажа под действием возмущения и сокращении времени возвращения экраноплана на опорную высоту полета и к балансировочному значению угла тангажа по окончании действия возмущения. Способ заключается в измерении угла тангажа, угловой скорости, углового ускорения, формировании управляющих сигналов, пропорциональных углу тангажа и углового ускорения, и формировании нелинейного сигнала управления, значение коэффициента демпфирования в котором зависит от знака и значения угла тангажа, знака и значения угловой скорости. Управляющие сигналы суммируются и поступают на рулевой агрегат, непосредственно воздействующий на руль высоты. 5 ил.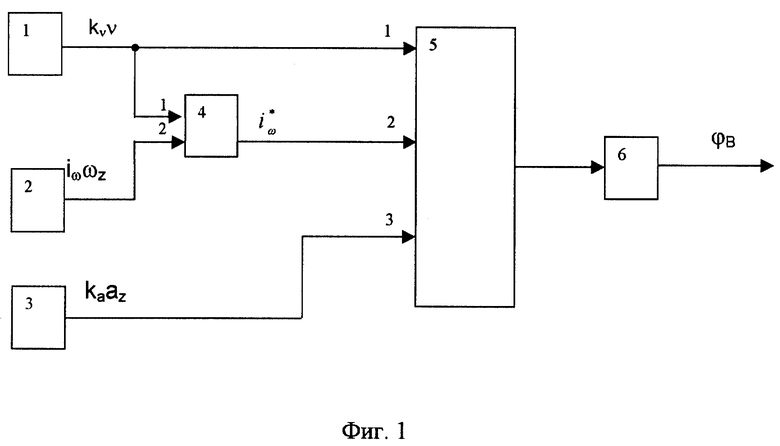
Способ управления продольным движением экраноплана, основанный на формировании сигналов, пропорциональных углу тангажа, угловой скорости и углового ускорения, формировании управляющих сигналов, пропорциональных текущим значениям угла тангажа и углового ускорения со своими коэффициентами передачи, суммировании управляющих сигналов с последующим преобразованием полученного сигнала в угловое перемещение руля высоты, отличающийся тем, что формируют нелинейный управляющий сигнал, зависящий от величин и знаков текущих значений угла тангажа и угловой скорости вида
i
где iω - расчетное значение коэффициента демпфирования в линейной системе;
ωz - угловая скорость;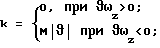
где М - некоторый постоянный коэффициент; ϑ - текущее значение угла тангажа.
| Бортовые системы управления полетом/Под ред | |||
| Ю.В | |||
| БАЙБОРОДИНА | |||
| - М.: Транспорт, 1975, с.254 | |||
| RU 2070729 С1, 20.12.1996 | |||
| Фильтр | 1983 |
|
SU1171058A1 |
| ДИОМИДОВ В.Б | |||
| Автоматическое управление движением экранопланов | |||
| СПб.: ЦНИИ "Электроприбор", 1996, с.86. | |||

