Взаимозависимая группа изобретений относится к легкомоторной авиации. Заявленные технические решения могут быть использованы для производства и эксплуатации летательных аппаратов, предназначенных как для профессионального, так и для любительского использования в качестве транспортного средства, предназначенного для перемещения малогабаритных грузов или ограниченного количества пассажиров.
Известен летательный аппарат, который включает гибкое крыло, состоящее из мототележки, килевой и боковой балок, подвижной поперечной балки, мачты, несущих растяжек, обшивки, проводки управления креном и тангажом, кинематически связанных одним концом с ручкой управления аппаратом (заявка Великобритании №2189752, МПК 4, B64C 17/00, публ. РИ «Изобретения стран мира», выпуск 48, 1989).
Недостатком известного устройства является то, что заданное направление полета обеспечивается балансирным управлением за счет сдвига центра масс. Конструкция известного летательного аппарата предопределяет возможность возникновения опасных для пилота режимов полета, в результате которых затруднен выход на нормальные эксплуатационные режимы пилотирования.
В известном техническом решении сдвиг мототележки относительно килевой балки летательного аппарата приводит к ограничению диапазона его летно-технических характеристик. Использование в качестве проводки по крену несущих растяжек боковых балок, кинематически связанных с ручкой управления аппаратом, является ненадежным техническим решением для пилотирования в режиме турбулентной атмосферы или срыва.
Наиболее близким техническим решением, выбранным в качестве прототипа, является летательный аппарат, включающий каркас, силовую установку, гибкое крыло, несущая часть которого состоит из килевой, боковых и поперечных балок, проводки управления, которая обеспечивает кинематическую связь системы управления в виде штурвальной колонки с элементами управления летательного аппарата (патент Украины №24503 A, опубл. 30.10.1998 г., Бюл. №5).
Недостатком известного устройства является наличие у него хвостовой части фюзеляжа, который увеличивает габаритные размеры летательного аппарата. Это накладывает свои особенности в процессе эксплуатации, особенно для палубной авиации. Кроме того, это увеличивает материалоемкость и вес конструкции, а также трудозатраты и себестоимость при изготовлении.
Известен способ управления летательным аппаратом, который включает полет в воздухе летательного аппарата, имеющий систему управления и гибкое крыло, воздействие ручкой управления на проводку управления креном и тангажом (заявка Великобритании № 2189752, МКИ 4, B64C 17/00, публ. РИ "Изобретения стран мира", выпуск 48, 1989).
Недостатком известного способа является то, что управление летательным аппаратом осуществляется путем смещения центра масс. Это не исключает выход летательных аппаратов на опасные режимы, особенно при значительной подвижности воздушных масс или недостаточной квалификации пилота. Способ ограничивает летно-технические характеристики летательного аппарата и делает ненадежным систему его управления при пилотировании в режиме турбулентной атмосферы или срыва.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ управления летательным аппаратом, который включает полет в воздухе летательного аппарата, снабженного системой управления в виде штурвальной колонки и штурвала, гибким крылом с килевой балкой и связанными между собой боковыми и поперечными балками, воздействие системой управления на проводку управления и придание прямолинейного направления летательному аппарату происходит за счет симметричного расположения горизонтальных поверхностей полукрыльев летательного аппарата относительно его продольной оси или придания заданного направления движения за счет принудительной асимметрии горизонтальных поверхностей полукрыльев летательного аппарата относительно его продольной оси в проекции на вертикальную и горизонтальную плоскости (патент Украины №24503 A, опубл. 30.10.1998 г., Бюл. №5).
Недостатком известного способа является сложность управления аппаратом в полете из-за наличия хвостовой балки фюзеляжа и хвостового оперения, а также значительных габаритных размеров по сравнению с заявленной конструкцией.
Задачей первого технического решения из группы изобретений является усовершенствование конструкции летательного аппарата за счет выполнения проводки управления из двух цепей управления, передаточные элементы которых состоят из гибких и жестких элементов:
- жесткие элементы соединены между собой шарнирами и связывают шарнирно-закрепленную штурвальную колонку с килевой балкой гибкого крыла с возможностью изменения угла атаки крыла;
- гибкие элементы одним концом диаметрально соединены к боковой поверхности тела вращения штурвала, ось которого закреплена к штурвальной колонке, а другим концом каждый гибкий элемент присоединен к соответствующей поперечной балке гибкого крыла, которая взаимодействует с боковой балкой, выполненной с возможностью изменения соотношения площадей полукрыльев относительно продольной оси летательного аппарата.
Технический результат при реализации первого из изобретений заключается в компактности конструкции, которая обеспечивает надежность работы всех конструктивных элементов системы управления, функционирование которых позволяет пилотировать летательным аппаратом при разных режимах полета. Конструкция летательного аппарата обеспечивает возможность пилотирования без хвостовой части, которая делает летательный аппарат высокоманевренным и с высокими аэродинамическими характеристиками.
Задачей второго технического решения из группы изобретений является усовершенствование способа управления летательным аппаратом, снабженным гибким крылом за счет выполнения системы управления в виде кинематически связанных между собой проводок управления из гибких и жестких передаточных элементов, которые соединяют с системой управления:
- для заданного направления полета по тангажу изменяют угол атаки гибкого крыла;
- для заданного направления полета в горизонтальной плоскости изменяют площади гибких полукрыльев.
Технический результат при реализации второго из изобретений состоит в высокой маневренности летательного аппарата, стабильности летных характеристик при эксплуатационных и экстремальных режимах эксплуатации, снижении физической нагрузки на пилота на протяжении продолжительного полета.
Поставленная задача в первом изобретении решается за счет того, что летательный аппарат включает каркас, силовую установку, гибкое крыло, несущая часть которого состоит из килевой, боковых и поперечных балок, проводку управления, которая обеспечивает кинематическую связь системы управления в виде штурвальной колонки с элементами управления летательного аппарата.
В соответствии с первым изобретением проводка управления выполнена с образованием двух цепей управления, передаточные элементы которых состоят из двух гибких элементов, например, в виде тросовой проводки управления и жестких тяг управления, при этом жесткие тяги управления соединены между собой шарнирами и связывают шарнирно закрепленную штурвальную колонку с килевой балкой гибкого крыла с возможностью изменения угла атаки крыла, а гибкие элементы одним концом диаметрально присоединены к боковой поверхности тела вращения штурвала, ось которого закреплена к штурвальной колонке, а другим концом каждый гибкий элемент присоединен к соответствующей поперечной балке гибкого крыла, взаимодействующего с боковой балкой, выполненной с возможностью изменения соотношения площадей полукрыльев относительно продольной оси летательного аппарата.
Поставленная задача во втором изобретении решается за счет того, что способ управления летательным аппаратом включает полет в воздухе летательного аппарата, снабженного системой управления в виде штурвальной колонки и штурвала, гибким крылом с килевой балкой и связанными между собой боковыми и поперечными балками, воздействием системой управления на проводку управления и придание прямолинейного направления летательному аппарату за счет симметричного расположения горизонтальных поверхностей полукрыльев летательного аппарата относительно его продольной оси, и придание заданного направления движения за счет принудительной асимметрии горизонтальных поверхностей полукрыльев летательного аппарата относительно его продольной оси в проекции на вертикальную и горизонтальную плоскости.
В соответствии со вторым изобретением систему управления выполняют в виде кинематически связанных между собой проводок управления, одну из которых выполняют в виде двух гибких передаточных элементов, а другую - в виде жесткого передаточного элемента с шарнирными сочленениями, при этом жесткий передаточный элемент одним концом соединяют с системой управления - штурвальной колонкой, а другим концом - с килевой балкой, с помощью которой для придания нужного направления полета по тангажу изменяют угол атаки гибкого крыла, при этом концы гибких передаточных элементов с одной стороны между собой соединяют диаметрально на шкиве штурвала, который располагают на штурвальной колонке, а каждый другой конец каждого гибкого передаточного элемента соединяют с соответствующей поперечной балкой гибкого крыла, при этом изменением длины гибких передаточных элементов воздействуют на системы: поперечные балки - боковые балки, с помощью которых изменяют соотнощение площадей полукрыльев относительно продольной оси летательного аппарата, при этом одновременно увеличивают угол атаки крыла за счет воздействия на килевую балку жестким передаточным элементом, в результате чего заданное направление полета в горизонтальной плоскости обеспечивают в сторону меньшей площади полукрыла, причем управляющее воздействие на жесткий передаточный элемент совмещают с одновременным управляющим воздействием на гибкие передаточные элементы.
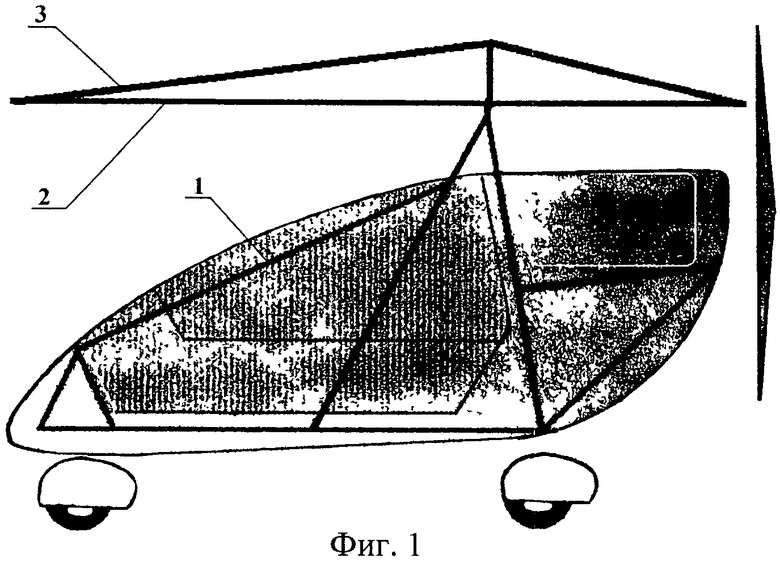
Заявленные изобретения иллюстрируются схемами, где на фиг.1 показана общая схема летательного аппарата; на фиг.2 - фронтальная проекция кинематической схемы летательного аппарата; на фиг.3 - вид A - на штурвальную колонку летательного аппарата с направляющими блочками и гибкие элементы тросовой проводки управления; на фиг.4 - вид B - сверху на систему тросовой проводки, которая воздействует на поперечную балку гибкого крыла; на фиг.5 - вид сверху на гибкое крыло и его несущие элементы.
Летательный аппарат включает несущий каркас 1, к которому закрепляют кабину пилота и силовую установку (на схемах не показано). В верхней части несущего каркаса 1 к килевой балке 2 закрепляют гибкое крыло 3, несущей частью которого являются боковые 4 и поперечные 5 балки. Гибкое крыло 3 состоит из двух полукрыльев, которые в исходном положении симметричны килевой балке 2. В процессе полета придание необходимого направления движения обеспечивается за счет кинематической связи системы: конструктивные элементы гибкого крыла 3 - проводка управления - система управления летательным аппаратом в виде штурвальной колонки 6 со штурвалом 7.
Изменение пространственного положения крыла 3 обеспечивается при синхронном перемещении элементов системы управления. Для этого штурвальная колонка 6 выполнена шарнирно закрепленной, что позволяет ее маятниково перемещать в процессе полета. На штурвальной колонке 6 закреплено тело вращения штурвала 7, круговое перемещение которого осуществляется с помощью рукояток 8. Применение тросовой проводки 9 позволяет изменять положение поперечной балки 5 даже при значительной длине передаточной цепи. Для предупреждения преждевременного износа тросов 9 в местах их поворотов установлены направляющие блочки 10.
В заявляемой конструкции перемещение тросовой проводки 9, которая перемещает противоположные поперечные балки 5 крыла 3, осуществляется единовременно во взаимно-противоположных направлениях. Исходя из этого каждая поперечная балка 5 соединена с собственным гибким элементом (тросом) 9, которые противоположными концами диаметрально подсоединены к боковой поверхности тела вращения штурвала 7, ось которого закреплена к штурвальной колонке 6. Диаметральное крепление гибких элементов 9 к штурвалу 7 позволяет синхронизировать перемещение гибких элементов 9 тросовой проводки. Это значит, что при повороте рукояток штурвала 7 один из элементов тросовой проводки 9 укорачивается, захватывая за собой поперечную балку 5, а другой удлиняется пропорционально, воздействуя на другую поперечную балку ("отпуская ее").
Изменение длины гибких тросовых проводок 9 позволяет смещать боковые балки 4 и, соответственно, изменять площадь того или другого полукрыла летательного аппарата относительно его продольной оси.
Изменение положения крыла 3 летательного аппарата относительно горизонтальной плоскости и, соответственно, изменение угла его атаки достигается за счет перемещения килевой балки 2, которая шарнирно присоединена к несущему каркасу 1 летательного аппарата.
Проводка управления из жестких элементов - тяг управления - выполнена шарнирно сочлененной. Один конец жесткой проводки 11 шарнирно присоединен к килевой балке 2, а другой - к подвижной штурвальной колонке 6. Возвратно-поступательное перемещение штурвальной колонки 6 в ту или другую сторону с высокой точностью и пропорциональностью изменяет угол атаки крыла 3.
Особенностью конструкции летательного аппарата является то, что система управления позволяет компенсировать нежелательные сдвиги гибких проводок 9 управления при возвратно-поступательном перемещении штурвальной колонки 6. Это достигается за счет того, что соосно шарниру штурвальной колонки 6 установлены направляющие блочки 10 гибких проводок управления 9. С таким же диаметром направляющие блочки устанавливаются на оси вращения крыла 3, в результате чего происходит изменение угла атаки крыла 3. Это условие позволяет при изменении положения штурвальной колонки 6 по тангажу, проводке управления по крену сохранять постоянной свою длину. А именно: сколько длины троса наматывается (сматывается) на блочки, которые находятся на оси штурвальной колонки, столько же при этом сматывается (наматывается) с блочков, которые находятся на оси вращения крыла.
Управление летательным аппаратом в полете осуществляется с помощью системы управления: штурвальная колонка 6 со штурвалом 7 - проводка управления 9 - гибкое крыло 3 с килевой балкой 2 и связанными между собой боковыми 4 и поперечными 5 балками. В процессе полета системой управления обеспечивают прямолинейное направление летательному аппарату за счет симметричного расположения горизонтальных поверхностей полукрыльев летательного аппарата относительно его продольной оси. Заданное направление движения по крену обеспечивают за счет принудительной асимметрии горизонтальных поверхностей полукрыльев летательного аппарата относительно его продольной оси в проекции на вертикальную и горизонтальную плоскости.
В целом, изменение направления движения летательного аппарата по крену и тангажу достигается за счет того, что систему управления выполняют в виде кинематически связанных между собой проводок управления, одну из которых выполняют в виде двух гибких передаточных элементов 9, а другую - в виде жесткого передаточного элемента 11 с шарнирными сочленениями.
Для придания нужного направления полета по тангажу изменяют угол атаки гибкого крыла 3. Это достигается тем, что перемещают штурвальную колонку 6 и жестким передаточным элементом 11 воздействуют на килевую балку 2. Килевая балка 2 изменяет угол атаки и летательный аппарат идет на снижение или набирает высоту.
Для полета летательного аппарата по крену изменяют соотношение площадей полукрыльев относительно продольной оси летательного аппарата, при этом одновременно увеличивают угол атаки крыла 3 за счет воздействия с помощью штурвальной колонки 6 жестким передаточным элементом 11 на килевую балку 2. Изменение соотношения площадей полукрыльев обеспечивают за счет того, что концы гибких передаточных элементов 9 с одной стороны между собой соединяют диаметрально на шкиве штурвала 7, который располагают на штурвальной колонке 6, а другой конец каждого гибкого передаточного элемента 9 соединяют с соответствующей поперечной балкой гибкого крыла 5. Изменением длины гибких передаточных элементов 9 воздействуют на системы: поперечные балки 5 - боковые балки 4, с помощью которых заданное направление полета в горизонтальной плоскости обеспечивают в сторону меньшей площади полукрыла.
Для обеспечения работоспособности системы управления необходимое выполнение:
- условия соответствия угла отклонения штурвальной колонки 6 к углу отклонения килевой балки 2 с отношением 1:1;
- условия равных диаметров блочков 10 тросовой проводки, установленных на оси вращения штурвальной колонки 6 и на оси вращения килевой балки 2.
При этом при перемещении штурвальной колонки 6 назад (увеличение угла атаки), определенная гибкая тросовая проводка 9 (управление по крену) наматывается на блочки 10, которые находятся на оси вращения штурвальной колонки 6, при этом килевая балка 2 за этот же время возвратилась относительно своей оси на величину увеличения угла атаки и такая же определенная часть троса (управление по крену) сматывается с блочков 10, которые находятся на оси вращения килевой балки 2. И наоборот, при перемещении штурвальной колонки 6 вперед (на уменьшение угла атаки) определенная длина гибкой тросовой проводки 9 (управление по крену сматывается с блочков 10, которые находятся на оси вращения штурвальной колонки 6, при этом килевая балка 2 за этот же время возвратилась относительно своей оси на уменьшение угла атаки и определенная часть троса (управление по крену) наматывается на блочки 10, которые находятся на оси вращения килевой балки 2. Общая длина тросовой проводки 9 остается неизменной, чем и обеспечивается работоспособность системы управления.
При прямолинейном пилотировании штурвальная колонка 6 и штурвал 7 находятся в нейтральном положении. Боковые 4 и поперечные 5 балки симметричны килевой балке 2, при этом площадь поверхности левого полукрыла равняется площади поверхности правого полукрыла.
Управление летательным аппаратом по крену осуществляется поворотом штурвала 7 "влево" или "вправо".
При крене "влево" в ветвях тросовой проводки управления 9 возникает разность усилий, которая с помощью подвижных блочков 10 передается подвижным поперечным балкам 5. Поперечная балка 5, смещаясь "вправо", захватывает за собой боковую балку 4. Левая боковая балка смещается относительно шарнира в сторону килевой балки, а правая боковая балка - от нее. В результате этого площадь левого полукрыла уменьшается, а правого увеличивается. За счет разности величин подъемных сил полукрыльев возникает крутящий момент, который обеспечивает крен аппарата "влево".
Для создания правого крена штурвал 7 возвращают "вправо" и крен летательного аппарата достигается аналогично вышеизложенному.
Управление летательным аппаратом по тангажу осуществляется отклонением штурвальной колонки 6 "от себя" или "на себя".
При отклонении штурвальной колонки 6 "от себя" усилие по жестким передаточным проводкам управления 11 передается на шарнирно закрепленную килевую балку 2, при этом подъемная сила гибкого крыла 3 уменьшается и аппарат идет на снижение.
При отклонении штурвальной колонки 6 "на себя" подъемная сила гибкого крыла 3 увеличивается и аппарат набирает высоту.
Испытание летательного аппарата и способа его управления показали их высокие эксплуатационные качества не только за счет значительного уровня технических характеристик, а также и за счет создания комфортных условий для работы пилота. Заявленная конструкция позволяет применить в летательном аппарате кабину для пилота и пассажиров с высоким уровнем герметичности, кондиционирования и снижением шума от работы двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2148528C1 |
| Способ интуитивного управления летательным аппаратом | 2018 |
|
RU2711770C1 |
| КРЫЛО МНОГОФУНКЦИОНАЛЬНОГО СВЕРХЛЕГКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208541C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С КРЫЛОМ-СТАБИЛИЗАТОРОМ | 2020 |
|
RU2743306C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2017 |
|
RU2672308C1 |
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ И ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2667410C1 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2646691C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАКРЫЛКАМИ КРЫЛЬЕВ И ГОРИЗОНТАЛЬНЫМ ОПЕРЕНИЕМ ГИБРИДНОГО ВЕРТОЛЕТА | 2013 |
|
RU2551830C2 |



Изобретение относится к легкомоторной авиации. Летательный аппарат включает каркас, силовую установку, гибкое крыло, проводку управления, штурвальную колонку, элементы управления летательным аппаратом. Проводка управления выполнена с образованием двух цепей управления, передаточные элементы которых состоят из двух гибких элементов (тросовая проводка управления) и жестких тяг управления. Жесткие тяги управления соединены между собой шарнирами и связывают шарнирно-закрепленную штурвальную колонку с килевой балкой гибкого крыла с возможностью изменения угла атаки крыла. Гибкие элементы одним концом диаметрально присоединены к боковой поверхности тела вращения штурвала (шкив штурвала), а другим концом каждый гибкий элемент присоединен к соответствующей поперечной балке гибкого крыла. Изменением длины гибких передаточных элементов воздействуют на систему поперечные балки - боковые балки, с помощью которых изменяют соотношение площадей полукрыльев относительно продольной оси. Одновременно увеличивают угол атаки крыла за счет воздействия на килевую балку жестким передаточным элементом. Заданное направление полета в горизонтальной плоскости обеспечивают в сторону меньшей площади полукрыла. Управляющее воздействие на жесткий передаточный элемент сочетают с одновременным управляющим воздействием на гибкие передаточные элементы. Достигается компактность конструкции, надежность пилотирования при разных режимах полета, высокая маневренность при пилотировании без хвостовой части с высокими аэродинамическими характеристиками, снижение физической нагрузки на пилота. 2 н.п. ф-лы, 5 ил.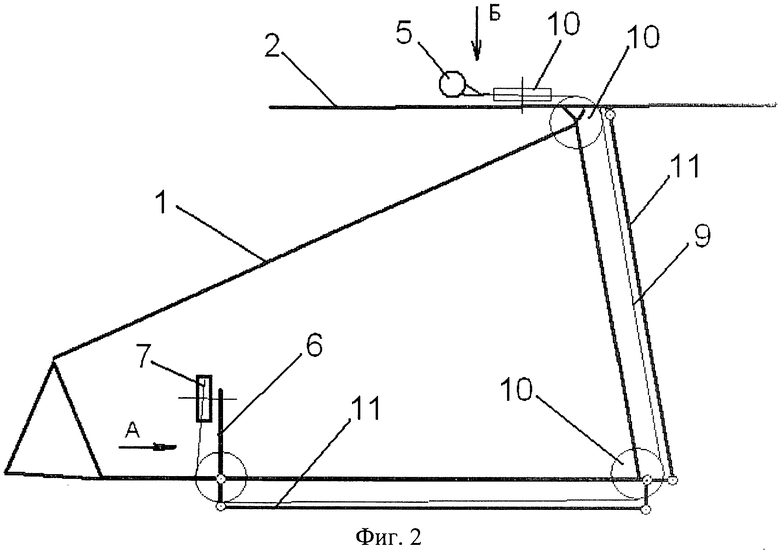
1. Летательный аппарат, включающий каркас, силовую установку, гибкое крыло, несущая часть которого состоит из килевой, боковых и поперечных балок, проводку управления, которая обеспечивает кинематическую связь системы управления в виде штурвальной колонки с элементами управления летательного аппарата, отличающийся тем, что проводка управления выполнена с образованием двух цепей управления, передаточные элементы которых состоят из двух гибких элементов, например в виде тросовой проводки управления, и жестких тяг управления, при этом жесткие тяги управления соединены между собой шарнирами и связывают шарнирно закрепленную штурвальную колонку с килевой балкой гибкого крыла с возможностью изменения угла атаки крыла, а гибкие элементы одним концом диаметрально присоединены к боковой поверхности тела вращения штурвала, ось которого закреплена к штурвальной колонке, а другим концом каждый гибкий элемент присоединен к соответствующей поперечной балке гибкого крыла, взаимодействующей с боковой балкой, выполненной с возможностью изменения соотношения площадей полукрыльев относительно продольной оси летательного аппарата.
2. Способ управления летательным аппаратом, который включает полет в воздухе летательного аппарата, снабженного системой управления в виде штурвальной колонки со штурвалом и гибким крылом с килевой балкой и связанными между собой боковыми и поперечными балками, воздействие системой управления на проводку управления и придание прямолинейного направления летательному аппарату за счет симметричного расположения горизонтальных поверхностей полукрыльев летательного аппарата относительно его продольной оси, и придание заданного направления движения за счет принудительной асимметрии горизонтальных поверхностей полукрыльев летательного аппарата относительно его продольной оси в проекции на вертикальную и горизонтальную плоскости, отличающийся тем, что систему управления выполняют в виде кинематически связанных между собой проводок управления, одну из которых выполняют в виде двух гибких передаточных элементов, а другую - в виде жесткого передаточного элемента с шарнирными сочленениями, при этом жесткий передаточный элемент одним концом соединяют с системой управления - штурвальной колонкой, а другой конец - с килевой балкой, с помощью которой для придания нужного направления полета по тангажу изменяют угол атаки гибкого крыла, при этом концы гибких передаточных элементов с одной стороны соединяют диаметрально на шкиве штурвала, которые располагают на штурвальной колонке, а каждый другой конец каждого гибкого передаточного элемента соединяют с соответствующей поперечной балкой гибкого крыла, при этом изменением длины гибких передаточных элементов воздействуют на системы: поперечные балки - боковые балки, с помощью которых изменяют соотношение площадей полукрыльев относительно продольной оси летательного аппарата, при этом одновременно увеличивают угол атаки крыла за счет воздействия на килевую балку жестким передаточным элементом, в результате чего заданное направление полета в горизонтальной плоскости обеспечивают в сторону меньшей площади полукрыла, причем управляющее воздействие на жесткий передаточный элемент сочетают с одновременным управляющим воздействием на гибкие передаточные элементы.
| Аппарат для очистки бывшего в употреблении масла | 1930 |
|
SU24503A1 |
| СПОСОБ ПОЛУЧЕНИЯ СГУЩЕННОГО МОЛОЧНО-БЕЛКОВОГО ПРОДУКТА С САХАРОМ | 2000 |
|
RU2189752C2 |
| КОМБИНИРОВАННЫЙ СПОСОБ ЛЕЧЕНИЯ ПЕРВИЧНОЙ ОТКРЫТОУГОЛЬНОЙ ГЛАУКОМЫ НА ФОНЕ ПСЕВДОЭКСФОЛИАТИВНОГО СИНДРОМА В СОЧЕТАНИИ С КАТАРАКТОЙ | 2013 |
|
RU2555128C2 |
| US 3135483 А, 02.06.1964 | |||
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1998 |
|
RU2153441C2 |
| Мотодельтаплан | 1991 |
|
SU1821422A1 |

