Область техники, к которой относится изобретение
Изобретение относится к системе рентгеновской визуализации с рамой C-типа, способу получения данных трехмерного рентгеновского изображения объекта, а также к компьютерному программному элементу и машиночитаемому носителю информации.
Уровень техники
В системе с рамой C-типа трехмерная зона визуализации ограничивается геометрической структурой расстояния между источником и детектором и размером самого детектора. Для процедур визуализации в системе с рамой C-типа, обеспечивающей томографические данные рентгеновского изображения, которые также называются аналогичными CT процедурами визуализации, данное ограничение является недостатком, когда интересующая область не полностью покрывается трехмерной зоной визуализации. Например, при операционных вмешательствах, имеющих отношение к печени, например при лечении гиперваскулярного очагового образования печени, интересующая область может не быть полностью покрыта трехмерной зоной визуализации. US 2011/0255657 A1 относится к получению изображений CT и описывает боковое смещение детектора для увеличения зоны трехмерной визуализации. Однако должна быть обеспечена подвижность детектора, для чего требуются механические средства обеспечения возможности смещения.
Раскрытие изобретения
Таким образом, существует потребность в создании системы с рамой C-типа с расширенной трехмерной зоной визуализации, для которой требуется пониженное механическое усилие.
Задача изобретения решается посредством объекта изобретения, приведенного в независимых пунктах формулы изобретения, при этом дополнительные варианты осуществления включены в зависимые пункты формулы изобретения.
Следует отметить, что описанные ниже аспекты изобретения применяются также к системе рентгеновской визуализации с рамой C-типа, способу получения данных трехмерного рентгеновского изображения объекта, а также к компьютерному программному элементу и машиночитаемому носителю информации.
Согласно первому аспекту изобретения предложена система рентгеновской визуализации с рамой C-типа, выполненная с возможностью получения расширенных трехмерных изображений объекта, содержащая структуру с рамой C-типа с источником рентгеновского излучения и детектором рентгеновского излучения, установленным напротив источника рентгеновского излучения, механизированный привод для вращательного перемещения структуры рамы C-типа и блок управления. Структура рамы C-типа выполнена с возможностью выполнения вращательного сканирования вокруг оси вращения и вокруг изоцентра с получением множества рентгеновских проекций для формирования данных изображения для восстановленной трехмерной зоны визуализации. Блок управления выполнен с возможностью управления механизированным приводом. Блок управления также выполнен с возможностью вызывания вращательного перемещения структуры рамы C-типа для выполнения:
- первого вращательного рентгеновского сканирования вокруг первого изоцентра с первой осью вращения для первой зоны визуализации; и
- по меньшей мере второго вращательного рентгеновского сканирования вокруг второго изоцентра со второй осью вращения для второй зоны визуализации.
Первый и второй изоцентры смещены относительно друг друга таким образом, что линия, соединяющая первый и второй изоцентр, расположена поперечно для первой и второй осей вращения.
Термин «поперечный» относится к соединительной линии, которая является прямой линией и которая проходит поперек первой и второй оси вращения, то есть является поперечной относительно первой и второй оси вращения.
Например, первая и вторая оси вращения смещены таким образом, что первая и вторая зона визуализации находятся близко друг к другу или рядом друг с другом, например являются смежными зонами визуализации.
Например, первая и вторая оси вращения смещаются посредством поперечного смещения. Соединительная линия в этом случае перпендикулярна первой и второй осям вращения.
Например, первая и вторая оси вращения смещаются посредством поперечного смещения, при этом смещение имеет первый перпендикулярный векторный компонент, перпендикулярный к двум осям вращения, и первый параллельный векторный компонент, параллельный этим двум осям.
Например, первая и вторая оси вращения смещаются посредством поперечного смещения, при этом смещение имеет первый перпендикулярный векторный компонент, перпендикулярный одной из этих двух осей, и второй перпендикулярный векторный компонент, перпендикулярный другой из этих двух осей.
Например, представлена комбинация первого и второго перпендикулярного векторного компонента с параллельным векторным компонентом.
Первая и вторая ось вращения также могут быть смещены посредством вращения.
Первая и вторая ось вращения также могут быть смещены посредством параллельного и/или перпендикулярного смещения относительно одной из этих двух осей и посредством вращения.
Следует отметить, что термин «рама C-типа» относится к системе, в которой источник рентгеновского излучения располагается напротив детектора рентгеновского излучения, и объект может быть расположен между источником и детектором. Источник и детектор могут совместно перемещаться вокруг объекта, например каждый из них может вращаться посредством вращения на раме. Таким образом, термин «рама C-типа» также относится к так называемым системам рамы O-типа, в которых две рамы «C» соединяются с формированием «O». Термин «рама C-типа» также включает системы, в которых источник и детектор устанавливаются на индивидуальные роботизированные руки, выполненные с возможностью обеспечения перемещения, аналогичного раме C-типа.
Для первого и второго вращательных сканирований рама C-типа имеет фиксированный изоцентр. Смещение (например, сдвиг и/или вращение) первого и второго центра вращения обеспечивается посредством смещения опоры объекта относительно структуры рамы C-типа или посредством смещения структуры рамы C-типа относительно опоры объекта. Однако для обеспечения смещения также может быть обеспечена комбинация смещения и структуры рамы C-типа, и опоры объекта относительно друг друга.
Например, первые и вторые вращательные рентгеновские сканирования реализуются с множеством рентгеновских проекций, каждая из которых имеет пучок с веерообразной формой в плоскости вращения, покрывающий первый и второй объем проекции, соответственно, для восстановления первой и второй трехмерной зоны визуализации соответственно.
Например, восстановленная трехмерная зона визуализации может иметь форму цилиндра.
Например, блок управления выполнен с возможностью вызывания вращательного перемещения структуры рамы C-типа для выполнения дальнейшего вращательного рентгеновского сканирования в дополнение к первому и второму вращательному рентгеновскому сканированию.
В соответствии с примерным вариантом осуществления структура рамы C-типа выполнена с возможностью выполнения первого вращательного рентгеновского сканирования по первой траектории, и второго вращательного рентгеновского сканирования по второй траектории, смещенной относительно первой траектории, при этом первая и вторая траектории имеют одну и ту же форму траектории.
В соответствии с примерным вариантом осуществления блок управления выполнен с возможностью вызывания вращательного перемещения структуры рамы C-типа для выполнения вращательных сканирований таким образом, что первая и вторая зона визуализации соприкасаются друг с другом.
Например, первая и вторая зона визуализации имеют по меньшей мере один общий воксел.
Например, первая и вторая зона визуализации соприкасаются или перекрывают друг друга.
В соответствии с примерным вариантом осуществления первая и вторая ось вращения смещаются параллельно друг другу таким образом, что соединительная линия между первым и вторым изоцентром располагается перпендикулярно к первой и второй оси вращения.
Термины «параллельно» и «перпендикулярно» относятся также к расположению первой и второй осей, которое включает отклонения, например малые отклонения, от точной параллельности и точных 90°, например ±5° или ±10°.
В соответствии с еще одним примерным вариантом осуществления структура рамы C-типа выполнена с возможностью выполнения первого и второго вращательного сканирования в форме дуги окружности соответственно.
Вращение может быть выполнено с изменением расстояния от источника и/или детектора до центра вращения, в результате чего может быть, например, получена эллиптическая дуга.
В соответствии с еще одним примером блок управления выполнен с возможностью вызывания вращательного перемещения структуры рамы C-типа для выполнения первого и по меньшей мере второго вращательного сканирования в диапазоне по меньшей мере более чем 140°, например более чем 180° плюс угол веерного пучка.
Таким образом может быть достигнута высокая степень точности восстановления.
В соответствии с еще одним примерным вариантом осуществления блок управления выполнен с возможностью обеспечения выпуклой оболочки в качестве расширенной трехмерной зоны визуализации, заключающей в себе первую зону визуализации и вторую зону визуализации, а также остаточные области, при этом остаточные области располагаются в выпуклой оболочке, но вне первой и второй зон визуализации. Блок управления выполнен с возможностью использования данных проекций первого вращательного рентгеновского сканирования для восстановления первой зоны визуализации и данных проекций второго вращательного рентгеновского сканирования для восстановления второй зоны визуализации. Блок управления выполнен с возможностью использования данных проекций по меньшей мере для одной части первой зоны визуализации и данных проекций для по меньшей мере одной части второй зоны визуализации для восстановления остаточных областей.
В соответствии с примерным вариантом осуществления блок управления выполнен с возможностью использования данных проекций покрывающих вокселы сегментов для восстановления вокселов в остаточных областях, при этом покрывающие воксел сегменты представляют собой сегменты первых и/или вторых вращательных рентгеновских сканирований, и эти сегменты содержат точки захвата, для которых воксел, который должен быть восстановлен, располагается в соответствующей первой и/или второй зоне визуализации конкретной точки захвата.
Согласно второму аспекту изобретения предложен способ получения данных трехмерного рентгеновского изображения объекта, включающий в себя следующие этапы:
a) выполнение первого вращательного рентгеновского сканирования вокруг первого изоцентра;
b) выполнение по меньшей мере второго вращательного рентгеновского сканирования вокруг второго изоцентра.
Первый и второй центр вращения смещены относительно друг друга таким образом, что соединительная линия между первым и вторым изоцентром расположена поперечно относительно первой и второй оси вращения.
Термин «зона визуализации» также упоминается как «объем проекции». Зона визуализации, или объем проекции, относится к вокселам, которые видны на каждой рентгеновской проекции соответствующего вращательного сканирования, при этом «видны» означает, что они могут быть обнаружены детектором.
Например, дуга представляет собой дугу окружности, например выполнена в виде полукруга размером более чем 180° плюс угол веерного пучка.
В соответствии с примерным вариантом осуществления выпуклая оболочка выполнена в виде расширенной трехмерной зоны визуализации, заключающей в себе первую зону визуализации и вторую зону визуализации, а также остаточные области, при этом остаточные области располагаются в выпуклой оболочке, но вне первой и второй зон визуализации. Для восстановления первой зоны визуализации используются данные проекций первого вращательного рентгеновского сканирования; и для восстановления второй зоны визуализации используются данные проекций второго вращательного рентгеновского сканирования. Для восстановления остаточных областей используются данные проекций по меньшей мере одной части первой зоны визуализации и данные проекций по меньшей мере одной части второй зоны визуализации.
В соответствии с примерным вариантом осуществления для восстановления вокселов в остаточных областях используются данные проекций покрывающих воксел сегментов. Покрывающие воксел сегменты представляют собой сегменты первых и/или вторых вращательных рентгеновских сканирований, и эти сегменты содержат точки захвата, для которых воксел, который должен быть восстановлен, располагается в соответствующей первой и/или второй зоне визуализации конкретной точки захвата.
В соответствии с еще одним примерным вариантом осуществления для восстановления воксела в остаточных областях используются дифференцированные обратно спроецированные данные проекций вдоль покрывающих воксел сегментов.
Например, оптимальная настройка может быть достигнута путем обеспечения того, чтобы первое и второе вращательное рентгеновское сканирование имели траектории одной и той же формы; и чтобы i) первый и второй изоцентр были смещены таким образом, чтобы первая и вторая зона визуализации соприкасались друг другом; ii) первая и вторая ось вращения были параллельно смещены относительно друг друга таким образом, чтобы соединительная линия между первым и вторым изоцентром располагалась перпендикулярно к первой и второй осями вращения; и iii) первое и второе вращательные сканирования выполнялись по дуге окружности соответственно.
Однако следует отметить, что в соответствии с описанным также могут быть представлены отклонения и вариации относительно указанного выше. Например, без соответствия одному или более указанным параметрам или путем их настройки результаты для расширенной зоны визуализации могут быть достигнуты с немного сниженным качеством, но при этом они все еще целесообразны для целей изобретения.
Согласно аспекту изобретения расширенная зона визуализации (XFOV) основана на двух отдельных захватах, каждый из которых представлен в форме вращательного сканирования вокруг установленного центра вращения, то есть изоцентра. Однако по меньшей мере два пробега захвата, то есть их центры вращения, смещены относительно друг друга, таким образом, покрывая большую область с помощью сканирований при различных направлениях просмотра, обеспечивающих достаточность данных изображения для осуществления восстановления. Области, имеющие достаточное покрытие соответствующим вращательным сканированием, восстанавливаются на основании конкретного соответствующего вращательного сканирования. Для остаточных областей в пределах выпуклой оболочки используются данные изображения для обоих вращательных сканирований следующим образом: пока соответствующий воксел, то есть точка изображения, покрывается визуализацией для одного из вращательных сканирований, то есть соответствующим сегментом вращательного сканирования или траектории, то эти данные изображения используются для восстановления большего объема. Как только соответствующий воксел больше не покрывается следующей визуализацией на соответствующей траектории, начинают использоваться данные изображения с другой траектории, или другого вращательного сканирования, поскольку воксел теперь виден на соответствующей визуализации. В случае смещения, при котором трехмерные зоны визуализации вращательных рентгеновских сканирований не соприкасаются друг другом, могут появиться вокселы, которые не покрываются ни одним из соответствующих вращательных рентгеновских сканирований. В этом случае восстановление может, тем не менее, быть выполнено, хотя это и приведет к более низкой точности, однако этого все еще будет достаточно для обеспечения трехмерных данных изображения для расширенной зоны визуализации. Однако, когда трехмерные зоны визуализации соприкасаются друг другом, и в случае вращательного сканирования свыше по меньшей мере 180° плюс угол веерного пучка, обеспечивается, что все вокселы в пределах выпуклой оболочки могут быть восстановлены посредством объединения полученных данных для различных вращательных рентгеновских сканирований. Области в трехмерных зонах визуализации могут быть восстановлены, например, с применением последовательных стандартных FDK-восстановлений (известный алгоритм восстановления Фельдкампа, Дэвиса и Крессом). Однако трехмерные зоны визуализации могут пострадать от артефактов усечения. Например, алгоритм обратного проецирования с круговой фильтрацией (BPF) может быть модифицирован таким образом, чтобы могли быть восстановлены не только трехмерные зоны визуализации, но также и остаточные области. Например, воксел в остаточных областях может быть восстановлен с применением дифференцированных обратно спроецированных данных проекций (DBP) вдоль покрывающих воксел сегментов траекторий. Таким образом, математически точное восстановление обеспечивается в центральной плоскости всей зоны визуализации, если объект может быть выровнен вдоль бокового направления в расширенной зоне визуализации.
Эти и другие аспекты изобретения станут очевидными и будут объяснены в отношении вариантов осуществления, описанных ниже в настоящем описании.
Краткое описание чертежей
Примерные варианты осуществления изобретения будут описаны ниже со ссылкой на указанные ниже чертежи.
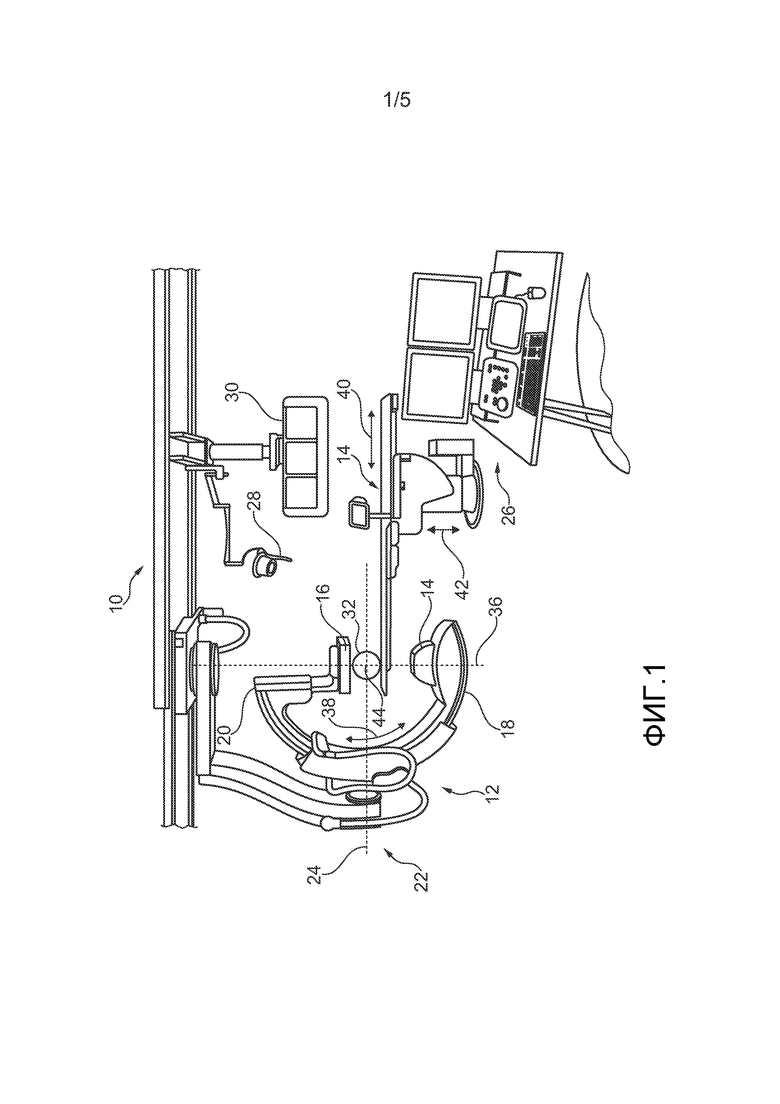
Фиг. 1 схематически описывает примерный вариант осуществления системы рентгеновской визуализации с рамой C-типа по изобретению.
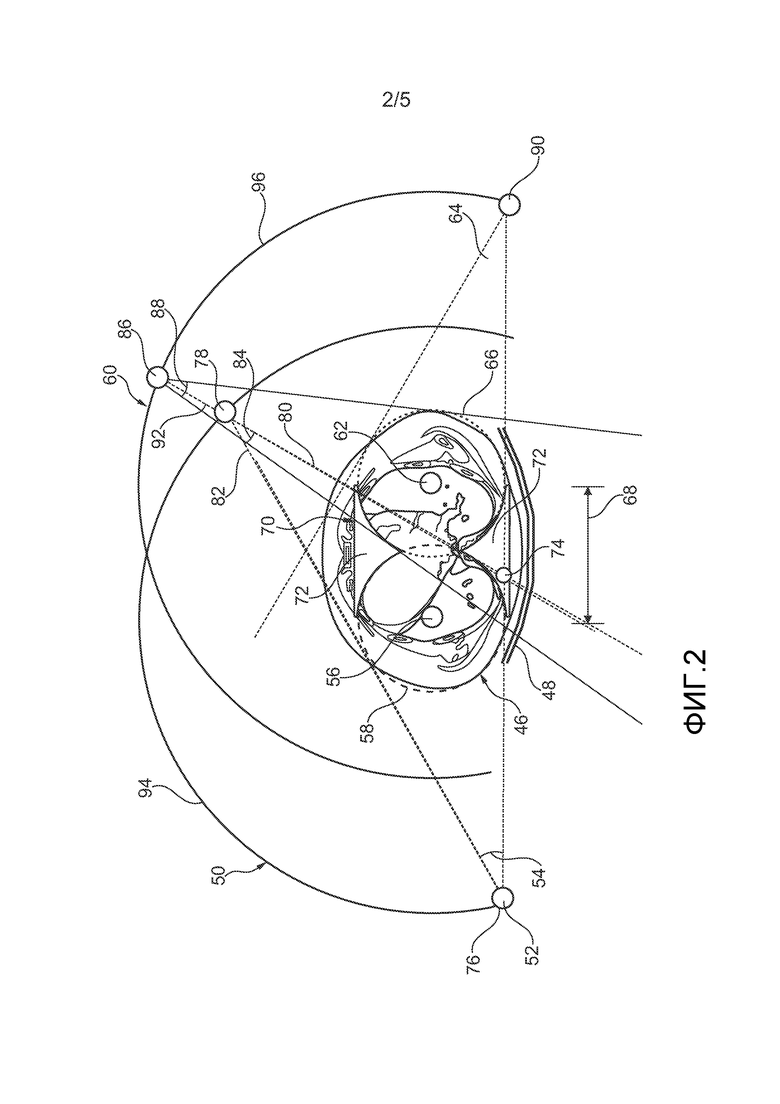
Фиг. 2 схематически описывает расположение по меньшей мере двух вращательных рентгеновских сканирований.
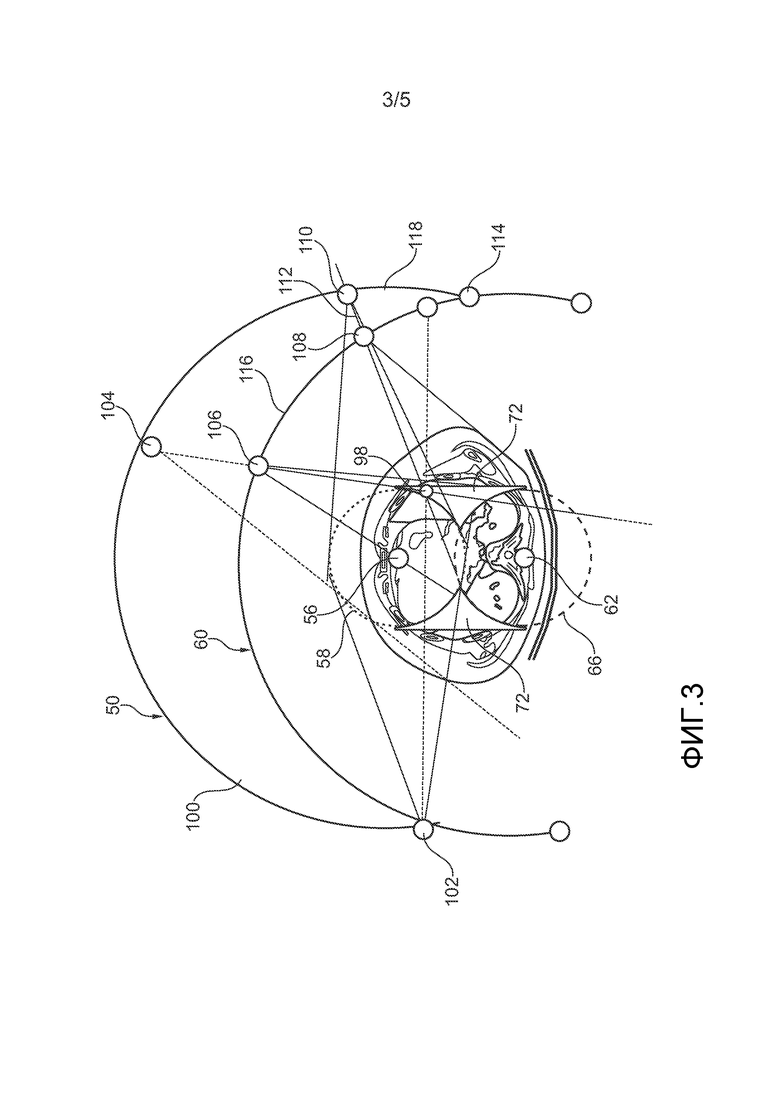
Фиг. 3 схематически показывает еще один вариант осуществления по меньшей мере двух вращательных рентгеновских сканирований.
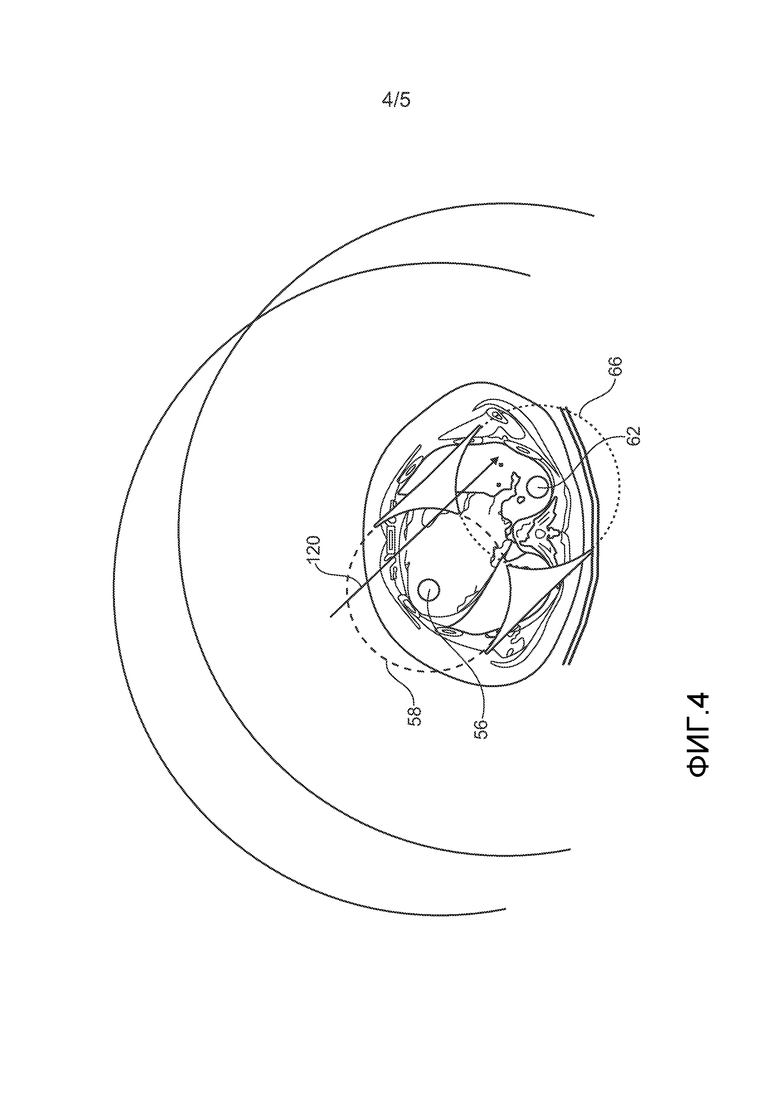
Фиг. 4 показывает еще один примерный вариант осуществления двух вращательных рентгеновских сканирований по изобретению.
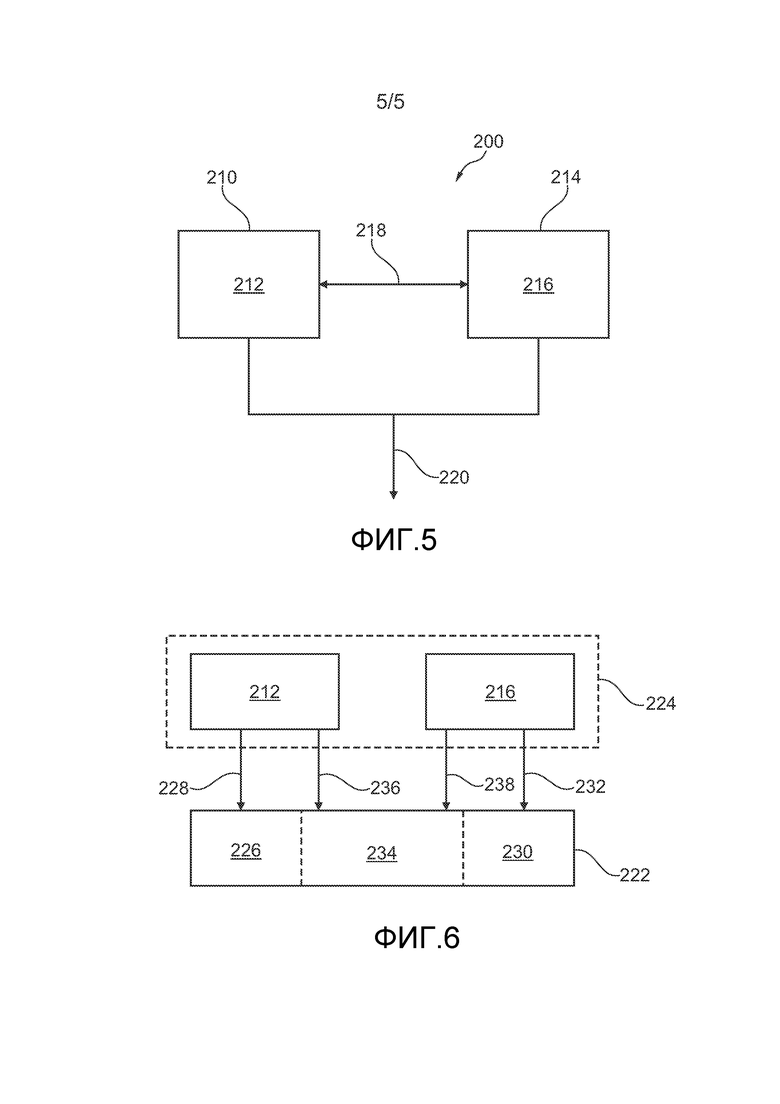
Фиг. 5 схематично поясняет основные этапы способа получения трехмерных данных изображения объекта по изобретению.
Фиг. 6 схематично показывает еще один пример способа по изобретению.
Осуществление изобретения
Как указано выше, настоящее изобретение предлагает способ получения и восстановления для реализации расширенной зоны визуализации (XFOV) по данным, полученным для двух дуг, например, полученных для двух дуг окружности. Изобретение включает получение данных для двух или более дуг, например, получение данных для дуг окружности, со смещением, например, сдвигом, изоцентра между получениями данных, при этом первый и второй изоцентр смещаются друг относительно друга таким образом, что соединительная линия между первым и вторым изоцентрами расположена поперечно к первой и второй осям вращения. Смещение изоцентра, например, сдвиг, может быть реализовано посредством смещения всей системы с рамой C-типа или посредством смещения стола для пациента, или посредством комбинации и того, и другого.
На фиг. 1 показана система 10 рентгеновской визуализации с рамой C-типа, содержащая структуру 12 рамы C-типа с источником 14 рентгеновского излучения и детектором 16 рентгеновского излучения, установленным напротив источника рентгеновского излучения, то есть на противоположных концах 18, 20 рамы C-типа. Также предусмотрен механизированный привод 22 для вращательного перемещения структуры рамы C-типа. Также может быть предусмотрена опора 24 объекта в форме стола для пациентов. Кроме того, предусмотрен блок 26 управления.
Кроме того, на фиг. 1 также показано осветительное оборудование 28 и устройство 30 отображения.
Структура рамы C-типа может вращаться вокруг объекта 32, расположенного на опоре 24 объекта. Расположение пациента относительно центра вращения, который формирует изоцентр, регулируется. Структура рамы C-типа позволяет осуществлять перемещение вокруг горизонтальной оси 34, а также вращательное перемещение вокруг вертикальной оси 36. Кроме того, также возможно скользящее перемещение по дуге, обозначенное двойной стрелкой 38. Перемещение стола для пациента также обозначается первой двойной стрелкой 40, показывающей горизонтальное перемещение, и второй двойной стрелкой 42, показывающей вертикальное перемещение. Для обеспечения движения или смещения изоцентра по изобретению, обеспечивается смещение, например сдвиг, стола перпендикулярно направлениям, обозначенным этими двумя стрелками 40 и 42. Кроме того, также обеспечивается вращательное перемещение стола вокруг вертикальной оси, хотя это и не показано дополнительно. Изоцентр обозначается точкой пересечения вертикальной оси 36 и горизонтальной оси 34, и эта точка пересечения обозначается цифровым обозначением 44.
В соответствии с изобретением структура рамы C-типа выполнена с возможностью выполнения вращательного сканирования вокруг оси вращения и вокруг изоцентра с получением множества рентгеновских проекций для формирования данных изображения для восстановленной трехмерной зоны визуализации.
«Поперечное» смещение относится к соединительной линии, которая является прямой линией и которая проходит поперечно относительно первой и второй осей вращения, то есть поперек первой и второй осей вращения. Например, первая и вторая оси вращения смещаются таким образом, что первая и вторая зона визуализации находятся близко друг к другу или вплотную, например, как смежные зоны визуализации.
Например, первая и вторая оси вращения смещаются посредством параллельного смещения.
В соответствии с другим примером (не показан) первая и вторая оси вращения смещаются посредством поперечного смещения, при этом смещение имеет первый перпендикулярный векторный компонент, перпендикулярный к двум осям вращения, и первый параллельный векторный компонент, параллельный этим двум осям.
В соответствии с еще одним примером (не показан) первая и вторая оси вращения смещаются посредством поперечного смещения, при этом смещение имеет первый перпендикулярный векторный компонент, перпендикулярный к одной из этих двух осей, и второй перпендикулярный векторный компонент, перпендикулярный к другой из этих двух осей.
В соответствии с еще одним примером (не показан) предусмотрена комбинация первого и второго перпендикулярного векторного компонента с параллельным векторным компонентом.
Первая и вторая ось вращения также могут быть смещены посредством вращения (не показано).
Первая и вторая ось вращения также могут быть смещены посредством сдвига, параллельного и/или перпендикулярного к одной из этих двух осей и посредством вращения (также не показано).
Блок 26 управления управляет механизированным приводом 22 и также вызывает вращательное перемещение структуры 12 рамы C-типа. Вращательные перемещения по изобретению будут описаны ниже в отношении фиг. 2-6.
На фиг. 2 схематично показан пример для геометрического расположения различных вращательных сканирований. Следует отметить, что вращательные сканирования показаны в форме траектории, относящейся, например, к пути перемещения источника рентгеновского излучения. Для лучшего понимания дополнительно не показано соответствующее перемещение источника рентгеновского излучения, которое происходит одновременно вследствие установки источника и детектора на противоположных концах рамы C-типа.
На фиг. 2 показано поперечное сечение 46 пациента, расположенного на структуре 48 опоры, при этом последняя представляет собой, например, опору 24 объекта.
В соответствии с изобретением первое вращательное рентгеновское сканирование 50 вокруг первого изоцентра 56 с первой осью вращения для первой зоны визуализации схематично поясняется первой траекторией, также обозначенной цифровым обозначением 50. Вдоль траектории получают множество рентгеновских проекций, каждая из которых имеет, например, пучок веерообразной формы в плоскости вращения, покрывающий первый объем проекции для восстановления первой трехмерной зоны визуализации. Например, для первой точки 52 рентгеновская проекция показана с первым углом 54, при этом угол определяется шириной детектора относительно расстояния между детектором и источником.
На фиг. 2 первая ось вращения располагается перпендикулярно к поверхности листа чертежа и проходит через первый изоцентр. Вторая ось вращения также располагается перпендикулярно к поверхности листа чертежа, но проходит через второй изоцентр.
Соединительная линия (не показана) между первым и вторым изоцентром является, таким образом, также и соединительной линией между первой и второй осью вращения.
Рентгеновский источник перемещается вдоль траектории 50 и одновременно поворачивается вокруг первого изоцентра 56, то есть первого центра 56 вращения. Таким образом, при смещении угла 54 посредством вращения вокруг центра 56 вращения первая зона 58 визуализации, то есть первый объем 58 проекции, обозначенный первым пунктирным кругом, обеспечена для восстановления первой трехмерной зоны визуализации.
Второе вращательное рентгеновское сканирование 60 вокруг второго изоцентра 62 со второй осью вращения для второй зоны визуализации показано со второй траекторией, для которой также используется цифровое обозначение 60. Второе вращательное рентгеновское сканирование также включает множество рентгеновских проекций с пучком, имеющим веерообразную форму в плоскости вращения, покрывающим второй объем проекции для восстановления второй трехмерной зоны визуализации. Вращение также выполняется по дуге вокруг второго изоцентра 62, то есть второго центра 62 вращения, например свыше по меньшей мере 140° вокруг предмета. Например, и первое, и второе вращение выполняется на величину свыше по меньшей мере 140°, например 180° плюс соответствующий угол 54 веерного пучка.
Второй угол 64 показывает соответствующий так называемый угол обзора, таким образом обеспечивая вторую зону 66 визуализации, то есть объем 66 проекции, для восстановления второй трехмерной зоны визуализации. Второй объем 66 проекции обозначается вторым пунктирным кругом.
Первый и второй центры 56, 62 вращения смещены относительно друг друга, как обозначено двойной стрелкой 68 интервала, таким образом, что соединительная линия между первым и вторым изоцентрами расположена поперечно к первой и второй оси вращения.
В результате первого и второго вращательных рентгеновских сканирований 50, 60, выпуклая оболочка 70 выполнена в виде расширенной трехмерной зоны визуализации, заключающей в себе первую зону 58 визуализации и вторую зону 66 визуализации, а также остаточные области 72, которые располагаются в пределах выпуклой оболочки 70, но вне первой и второй зон 58, 66 визуализации.
В примере, показанном на фиг. 2, вращательное перемещение структуры рамы C-типа выполняется по дуге в форме дуги окружности.
В соответствии с еще одним примерным вариантом осуществления, не показанным на чертеже, вращение выполняется с изменением расстояния между источником и/или детектором и центром вращения, что дает дугу эллиптической формы, тогда как дуга окружности основана на постоянном и неизменяемом расстоянии от источника и детектора до центра вращения соответственно.
Независимо от изменения расстояния источника и/или детектора до центра вращения, в соответствии с изобретением центр вращения остается зафиксированным. Другими словами, рама C-типа имеет (теоретически) установленный изоцентр для соответствующего вращательного сканирования. «Теоретически» относится к факту возможности возникновения очень малого перемещения центра вращения, которое может произойти вследствие изгибающих усилий и т.п.
Смещение, например, сдвиг и/или вращение, первого и второго центров 56, 62 вращения может быть обеспечено посредством смещения опоры 24 объекта относительно структуры 12 рамы C-типа или посредством смещения структуры 12 рамы C-типа относительно опоры 24 объекта. В соответствии с еще одним примером обеспечивается комбинация перемещения и структуры 12 рамы C-типа и опоры 24 объекта относительно друг друга.
В соответствии с еще одним примерным вариантом осуществления, не показанным дополнительно, вместо структуры 12 рамы C-типа предусмотрена так называемая система с рамой O-типа, в которой детектор рентгеновского излучения расположен напротив источника рентгеновского излучения, и объект может быть расположен между ними. Перемещение источника и детектора производится совместно посредством вращения.
В соответствии с еще одним примером вместо системы с рамой C-типа предусмотрены две отдельные роботизированные руки, которые выполнены с возможностью обеспечения перемещения, аналогичного перемещению рамы C-типа, то есть комбинированного перемещения источника и детектора рентгеновского излучения вокруг центра вращения.
На фиг. 2 первая трехмерная зона визуализации и вторая трехмерная зона визуализации соприкасаются друг с другом, например, как показано, в форме наложения.
В соответствии с еще одним примером первая и вторая зоны визуализации имеют по меньшей мере один общий воксел.
В соответствии с еще одним примером первая и вторая зоны визуализации могут быть смещены таким образом, чтобы две пунктирных окружности 58, 66 больше не соприкасались друг с другом.
Однако в этом случае полученная в результате информация о вокселе приводит по меньшей мере к определенной степени неоднозначности для пикселей в области между этими двумя кругами. Тем не менее восстановление расширенной зоны визуализации возможно даже в этом случае.
Для восстановления первой зоны визуализации, или первого объема проекции, обозначенной пунктирным кругом 58, используются данные проекций первого вращательного рентгеновского сканирования 50. Таким образом, все вокселы, расположенные в первой зоне визуализации, то есть в первом пунктирном круге 58, видны по всем направлениям вдоль первого вращательного рентгеновского сканирования 50 и соответствующей траектории.
Соответственно для восстановления второй зоны визуализации, или второго объема 66 проекции, используются данные проекций второго вращательного рентгеновского сканирования 60.
Для восстановления вокселов в остаточных областях 72 используются данные проекций для обоих вращательных рентгеновских сканирований 50, 60.
Например, что касается воксела 74 в остаточной области 72, этот воксел 74 виден на первом сегменте первой траектории 50, а именно от так называемой начальной точки, обозначенной цифровым обозначением 76, вплоть до точки 78. В последнем положении, то есть в точке 78, воксел 74 все еще виден, но не будет виден в следующей точке захвата, так как воксел 74 располагается на первой боковой линии 80 из соответствующего угла обзора, обозначенного первой боковой линией 80 и второй боковой линией 82, охватывающей угол обзора 84.
Однако воксел 74 также виден, то есть обнаруживается с помощью соответствующей проекционной информации, начиная с точки 86 на второй траектории 60. Это происходит потому, что воксел 74 теперь располагается внутри угла 88 веерного пучка из соответствующей точки 86. Для восстановления используются данные изображения с первой траектории 50 от начальной точки 76 до точки 78, и затем используются данные изображения со второй траектории 60 от точки 86 до соответствующей конечной точки, обозначенной цифровым обозначением 90.
Следует отметить, что если начать с конечной точки 90 из второй траектории при определении точки на траектории, до которой точка видна, то будет достигнута точка, расположенная за пределами точки 86. Другими словами, в показанном примере существует область перекрытия, в которой могут быть использованы данные изображения с двух проекционных траекторий 50 и 60.
Для того, чтобы определить соответствующую точку на второй траектории, может быть использовано продолжение соединительной линии от воксела 74 до второй точки 78 на первой траектории, которое обозначается пунктирным сегментом 92.
Сегмент первой траектории между первой точкой 76 и второй точкой 78 также называется покрывающим воксел сегментом 94 первой траектории 50.
Соответственно часть второй траектории 60 между точкой 86 и конечной точкой 90 называется покрывающим воксел сегментом 96 второй траектории. Покрывающие воксел сегменты 94, 96, таким образом, представляют собой сегменты первых и/или вторых вращательных рентгеновских сканирований, такие что эти сегменты содержат точки захвата, для которых воксел, который должен быть восстановлен, располагается в соответствующей первой и/или второй зоне визуализации, то есть объеме проекции, конкретной точки захвата.
В соответствии с еще одним примером, который не показан на чертеже, предусмотрено еще одно вращательное рентгеновское сканирование в дополнение к первому и второму вращательному рентгеновскому сканированию. Таким образом, предусмотрена еще одна зона визуализации, то есть еще один объем проекции, для восстановления еще одной трехмерной зоны визуализации. Например, она может быть представлена аналогичным образом, например, в форме соприкосновения или перекрытия. Для восстановления определяются соответствующие сегменты траекторий для вокселов вне зон визуализации.
Смещение может быть обеспечено, например, в направлении хорды дуги вращения, как показано на фиг. 2, или в направлении угловой биссектрисы дуги вращения, как показано на фиг. 3, или секущей к дуге, то есть поперечно к хорде и поперечно к угловой биссектрисе, как показано на фиг. 4.
Также следует отметить, что для восстановления вокселов, расположенных в остаточных областях, используется множество сегментов соответствующих траекторий.
Например, в отношении фиг. 3, воксел 98 восстанавливается с использованием проекционных данных первого сегмента 100 первой траектории, начиная с начальной точки 102 и заканчивая конечной точкой сегмента 104. Для дальнейшего восстановления используются данные проекций со второй траектории, а именно с точки 106 на второй траектории 60, которая определяется соединительной линией конечной точки 104 на первой траектории 50, соединенной с вокселом 98. Затем используется изображение, или данные проекций, со второй траектории до второй конечной точки 108, которая представляет собой точку на второй траектории, с которой воксел все еще виден. Затем опять происходит сдвиг к первой траектории посредством определения следующей начальной точки 110 на первой траектории 50 путем продления соединительной линии 112 между вокселом 98 и точкой 108 на второй траектории. Далее, данные проекций сегмента между второй начальной точкой 110 и конечной точкой 114 первой траектории 50 используются для восстановления воксела 98. Другими словами, два различных покрывающих воксел сегмента первой траектории и один покрывающий сегмент второй траектории используются для восстановления воксела 98.
Покрывающий воксел сегмент между точкой 106 и точкой 108 на второй траектории 60 обозначается цифровым обозначением 116, и сегмент траектории 50 между второй начальной точкой 110 и конечной точкой 114 называется покрывающим воксел сегментом 118.
На фиг. 3 показано вертикально выполненное смещение относительно ориентации чертежа сверху вниз, при этом на фиг. 4 схематично показано поперечное смещение, обозначенное стрелкой 120. Определение соответствующего воксела дополнительно не показано на фиг. 4, но может быть легко понято на основании приведенного выше пояснения. Кроме того, смещение показано в форме результата наложения круговых поперечных сечений в трансаксиальных направлениях, определяющих первую и вторую зоны визуализации (объемы проекции). Ширина диаметра первой и второй трехмерных зон визуализации определяется шириной эффективного пучка излучения в центре вращения, при этом эффективный пучок излучения является частью рентгеновского пучка, падающего на детектор и используемого для получения данных изображения. Круговое поперечное сечение имеет диаметр. Смещение может быть меньшим либо равным диаметру. Таким образом, круговые сечения соприкасаются друг с другом или имеют по меньшей мере один общий воксел.
Конечно, изобретение также применимо к смещению, превышающему диаметр.
Также следует отметить, что приведенное выше объяснение относится к примеру перемещения по дуге окружности, то есть по траектории в форме дуги окружности для первого и второго рентгеновского сканирования.
Однако вращательные сканирования также могут быть выполнены на дугах, имеющих другую форму, например на эллиптических дугах. В таких случаях, конечно, получаемые в результате объемы проекции были бы представлены не кругами, а имели бы эллиптическую или другую криволинейную форму.
На фиг. 5 показаны основные шаги способа 200 получения данных трехмерного рентгеновского изображения объекта, включающего в себя следующие этапы.
На первом этапе 210 выполняется первое вращательное рентгеновское сканирование 212 вокруг первого изоцентра.
Например, первое вращательное рентгеновское сканирование выполняется с множеством рентгеновских проекций с пучком, имеющим веерообразную форму в плоскости вращения, покрывающим первую зону визуализации (объем проекции), для восстановления первой трехмерной зоны визуализации, при этом вращение выполняется по дуге вокруг первого изоцентра, составляющей свыше по меньшей мере 140° вокруг объекта.
На втором этапе 214 по меньшей мере второе вращательное рентгеновское сканирование 216 выполняется вокруг второго изоцентра.
Например, второе вращательное рентгеновское сканирование выполняется со множеством рентгеновских проекций с пучком, имеющим веерообразную форму в плоскости вращения, покрывающим вторую зону визуализации (объем проекции) для восстановления второй трехмерной зоны визуализации, при этом вращение выполняется по дуге вокруг второго центра вращения, составляющей свыше по меньшей мере 140° вокруг объекта.
Первый и второй центр вращения смещены относительно друг друга, как обозначено двойной стрелкой 218, таким образом, что соединительная линия между первым и вторым изоцентрами расположена поперечно к первой и второй осям вращения.
Стрелка 220 указывает дальнейшее использование полученных таким образом данных изображения.
Например, первые и вторые зоны визуализации имеют по меньшей мере один общий воксел или соприкасаются друг с другом.
И первое, и второе вращательное сканирование выполняются со статическим изоцентром.
В соответствии с еще одним примером, выпуклая оболочка выполнена в виде расширенной трехмерной зоны визуализации, заключающей первую зону визуализации и вторую зону визуализации, а также остаточные области, при этом остаточные области располагаются внутри выпуклой оболочки, но вне первой и второй зон визуализации.
Например, остаточные области имеют форму двойного клина.
Остаточные области могут также называться остаточными участками.
На фиг. 6 показан еще один вариант осуществления способа по изобретению, в котором этап восстановления 222 предусмотрен в дополнение к этапам получения изображений, заключенным в пунктирный прямоугольник 224. Для восстановления 226 первой зоны визуализации используются данные проекций первого вращательного рентгеновского сканирования, которые обозначаются стрелкой 228. Для восстановления 230 из второй зоны визуализации используются данные проекций второго вращательного рентгеновского сканирования, как обозначено стрелкой 232. Для восстановления 234 остаточных областей используются данные проекций по меньшей мере для одной части первой зоны визуализации, как обозначено цифровым обозначением 236, и также используются данные проекций по меньшей мере для одной части второй зоны визуализации, как обозначено стрелкой 238.
В соответствии с еще одним аспектом также возможно использование данных проекций соответствующей другой дуги для улучшения соотношения сигнал-шум (SNR).
Для восстановления воксела в остаточных областях используется проекция для покрывающих воксел сегментов, при этом покрывающие воксел сегменты представляют собой сегменты первых и/или вторых вращательных рентгеновских сканирований, при этом данные сегменты содержат точки захвата, для которых воксел, который должен быть восстановлен, располагается в соответствующей зоне визуализации конкретной точки захвата.
Например, для восстановления воксела в остаточных областях используются дифференцированные обратно спроецированные данные проекций вдоль покрывающих воксел сегментов.
В соответствии с изобретением расширенная зона визуализации для трехмерной рентгеновской визуализации обеспечивается без необходимости наличия большого детектора или других механических средств.
В результате, например, в соответствии с фиг. 2, обеспечивается увеличенная приблизительно на 14% зона визуализации по сравнению с двумя кругами - (πr2+4r2)/(2πr2)≈1,14.
Таким образом, расширенная зона визуализации применима во множестве различных приложений, в которых она обеспечивает улучшение состояние приложения, например, для TACE печени, вмешательств в спинной мозг, эмболизации утробной артерии, одновременной визуализации обеих бедренных артерий.
Расширенная зона визуализации обеспечивается с множеством дуг. Таким образом, изобретение имеет целью обеспечение большей по размеру зоны визуализации посредством сканирования по двум или более дугам со сдвинутым изоцентром с получением одного, то есть единственного, восстановления. Предусмотрены три возможных решения.
Во-первых, обеспечиваются два независимых восстановления FDK с гладким размытием краев: два восстановления выполняются отдельно и затем сшиваются друг с другом посредством плавного смешивания. Данное решение имеет преимущество, заключающееся в том, что является нечувствительным к движению между сканированиями. Однако артефакты усечения могут присутствовать при обоих восстановлениях.
Во-вторых, предусмотрена модификация алгоритма Дефриза-Кларка для множества дуг. Это означает FBP в тот же самом объеме. Преимуществом является то, что зона визуализации может быть увеличена на 14% по сравнению с двумя кругами. Однако проблемы усечения в проекциях вследствие фильтрации на большом расстоянии все еще могут возникнуть. Кроме того, движение между сканированиями может внести артефакты.
В-третьих, предусмотрена модификация алгоритма восстановления BPF для множества дуг. Дифференцированные проекции от обеих дуг окружности подвергаются обратному проецированию в тот же самый объем. Обратное преобразование Гильберта затем применяется к этому единственному объему. Преимуществом является то, что зона визуализации увеличивается на 14% с точным восстановлением, если расширенная зона визуализации не усечена вдоль линий PI. Однако движение между сканированиями может внести артефакты.
В соответствии с еще одним примером предусмотрено итерационное восстановление.
Преимуществом является наличие большей зоны визуализации, например поверхности тела в зоне визуализации для планирования и отслеживания перемещения иглы, полной визуализации печени и т.п.
В другом примерном варианте осуществления изобретения предложена компьютерная программа или компьютерный программный элемент, которые отличаются тем, что они выполнены с возможностью выполнения этапов способа по одному из предыдущих вариантов осуществления в соответствующей системе.
Компьютерный программный элемент, следовательно, может храниться в вычислительном блоке, который также может являться частью варианта осуществления изобретения. Этот вычислительный модуль может быть выполнен с возможностью выполнения или вызывания выполнения этапов способа, описанных выше. Кроме того, он может быть выполнен с возможностью управления компонентами описанного выше устройства. Вычислительный модуль может быть выполнен с возможностью автоматического функционирования и/или выполнения команд пользователя. Компьютерная программа может быть загружена в рабочую память процессора данных. Процессор может быть, таким образом, выполнен с возможностью выполнения способа по изобретению.
Данный примерный вариант осуществления изобретения охватывает и компьютерную программу, изначально реализующую изобретение, и компьютерную программу, которая посредством обновления превращает существующую программу в программу, которая реализует изобретение.
Кроме того, компьютерный программный элемент может быть способен к обеспечению всех необходимых этапов для выполнения процедуры примерного варианта осуществления способа в соответствии с описанным выше.
В соответствии с еще одним примерным вариантом осуществления изобретения предложен машиночитаемый носитель, такой как CD-ROM, при этом на машиночитаемом носителе хранится компьютерный программный элемент, и этот компьютерный программный элемент был описан в предыдущем разделе.
Компьютерная программа может быть сохранена и/или распространена на соответствующем носителе, таком как оптический носитель или твердотельный накопитель, совместно или как часть других аппаратных средств, но может также поставляться в других формах, например, через Интернет или другие проводные или беспроводные телекоммуникационные системы.
Однако компьютерная программа может также быть обеспечена по сети, такой как Интернет, и может быть загружена в рабочую память процессора по такой сети. В соответствии с еще одним примерным вариантом осуществления изобретения предложен носитель для обеспечения возможности загрузки компьютерной программы, и этот компьютерный программный элемент выполнен с возможностью выполнения способа по одному из ранее описанных вариантов осуществления изобретения.
Следует отметить, что варианты осуществления изобретения описываются в отношении различных объектов изобретения. В частности, некоторые варианты осуществления описываются в отношении пунктов формулы изобретения, относящихся к способу, тогда как другие варианты осуществления описываются в отношении пунктов формулы изобретения, относящихся к устройству. Однако специалисту в данной области техники будет понятно на основании приведенного выше и ниже описания, что, если не указано обратное, то в дополнение к любой комбинации характеристик, принадлежащих пункту формулы изобретения одного типа, также любая комбинация характеристик, относящихся к различным объектам изобретения, считается раскрытой в настоящей заявке. Однако все характеристики могут объединяться, обеспечивая синергетические эффекты, которые представляют собой больше, чем простое суммирование характеристик.
При том, что изобретение пояснялось и подробно описывалось с помощью чертежей и предшествующего описания, такую иллюстрацию и описание следует считать иллюстративными или примерными, но не ограничивающими. Изобретение не ограничивается раскрытыми вариантами осуществления. Другие вариации раскрытых вариантов осуществления могут быть найдены и произведены специалистами в данной области техники при практическом применении изобретения на основании изучения чертежей, описания и зависимых пунктов формулы изобретения.
В формуле изобретения термин «содержащий» не исключает другие элементы или этапы, и единственное число не исключает множественного. Единственный процессор или другой модуль могут выполнять функции нескольких элементов, указанных в пунктах формулы изобретения. Сам факт того, что определенные средства охарактеризованы в различных зависимых пунктах, не указывает, что комбинация этих средств не может быть использована с выгодой. Любые условные обозначения в формуле изобретения не должны рассматриваться как ограничивающие его объем.
Группа изобретений относится к медицинской технике, а именно к системе рентгеновской визуализации с рамой C-типа. Система содержит структуру рамы С-типа с источником рентгеновского излучения и детектором рентгеновского излучения, установленным напротив источника рентгеновского излучения, механизированный привод для вращательного перемещения структуры рамы С-типа и блок управления, который выполнен с возможностью управления механизированным приводом и вызывания вращательного перемещения структуры рамы С-типа для выполнения первого вращательного рентгеновского сканирования вокруг первого изоцентра с первой осью вращения для первой зоны визуализации и по меньшей мере второго вращательного рентгеновского сканирования вокруг второго изоцентра со второй осью вращения для второй зоны визуализации, при этом первый и второй изоцентры смещены относительно друг друга таким образом, что соединительная линия между первым и вторым изоцентрами расположена поперечно относительно первой и второй осей вращения. Блок управления выполнен также с возможностью обеспечения выпуклой оболочки в качестве расширенной зоны трехмерной визуализации, заключающей в себе первую зону визуализации и вторую зону визуализации, а также остаточные области, которые располагаются в выпуклой оболочке, но вне первой и второй зон визуализации. Система снабжена машиночитаемым носителем, а способ получения данных трехмерного рентгеновского изображения объекта осуществляется посредством работы системы. Использование изобретений позволяет расширить арсенал средств рентгеновской визуализации. 3 н. и 11 з.п. ф-лы, 6 ил.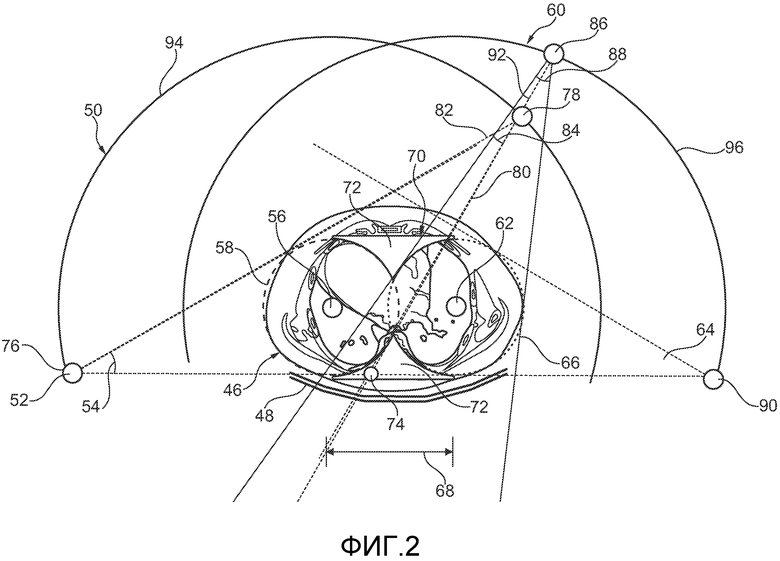
1. Система (10) рентгеновской визуализации с рамой С-типа, выполненная с возможностью получения расширенных трехмерных изображений объекта, содержащая:
- структуру (12) рамы С-типа с источником (14) рентгеновского излучения и детектором (16) рентгеновского излучения, установленным напротив источника рентгеновского излучения;
- механизированный привод (22) для вращательного перемещения структуры рамы С-типа; и
- блок (26) управления;
при этом структура рамы С-типа выполнена с возможностью выполнения вращательного сканирования вокруг оси вращения и вокруг изоцентра с получением множества рентгеновских проекций для формирования данных изображения для восстановленной трехмерной зоны визуализации;
при этом блок управления выполнен с возможностью управления механизированным приводом; и
при этом блок управления выполнен с возможностью вызывания вращательного перемещения структуры рамы С-типа для выполнения:
- первого вращательного рентгеновского сканирования (50) вокруг первого изоцентра (56) с первой осью вращения для первой зоны визуализации; и
- по меньшей мере второго вращательного рентгеновского сканирования (60) вокруг второго изоцентра (62) со второй осью вращения для второй зоны визуализации;
при этом первый и второй изоцентры смещены относительно друг друга таким образом, что соединительная линия между первым и вторым изоцентрами расположена поперечно относительно первой и второй осей вращения, и
при этом блок управления выполнен с возможностью обеспечения выпуклой оболочки (70) в качестве расширенной зоны трехмерной визуализации, заключающей в себе первую зону визуализации и вторую зону визуализации, а также остаточные области (72), при этом остаточные области располагаются в выпуклой оболочке, но вне первой и второй зон визуализации.
2. Система рентгеновской визуализации с рамой С-типа по п. 1, в которой структура рамы С-типа выполнена с возможностью выполнения первого вращательного рентгеновского сканирования с первой траекторией; и второго вращательного рентгеновского сканирования со второй траекторией, смещенной относительно первой траектории; при этом первая и вторая траектории имеют одну и ту же форму траектории.
3. Система рентгеновской визуализации с рамой С-типа по п. 1 или 2, в которой блок управления выполнен с возможностью вызывания вращательного перемещения структуры рамы С-типа для выполнения вращательных сканирований таким образом, чтобы первая и вторая зона визуализации соприкасались друг с другом.
4. Система рентгеновской визуализации с рамой С-типа п. 1, в которой первая и вторая ось вращения смещены параллельно друг другу таким образом, что соединительная линия между первым и вторым изоцентрами располагается перпендикулярно к первой и второй осям вращения.
5. Система рентгеновской визуализации с рамой С-типа п. 1, в которой структура рамы С-типа выполнена с возможностью выполнения первого и второго вращательных сканирований в форме дуги окружности, соответственно.
6. Система рентгеновской визуализации с рамой С-типа п. 1, в которой
блок управления выполнен с возможностью использования данных проекций первого вращательного рентгеновского сканирования для восстановления первой зоны визуализации; и данных проекций второго вращательного рентгеновского сканирования для восстановления второй зоны визуализации; и
при этом блок управления выполнен с возможностью использования данных проекций по меньшей мере для одной части первой зоны визуализации и данных проекций по меньшей мере для одной части второй зоны визуализации для восстановления остаточных областей.
7. Система рентгеновской визуализации с рамой С-типа п. 1, в которой блок управления выполнен с возможностью использования данных проекций для покрывающих воксел сегментов (94, 96; 100, 116, 118) для восстановления воксела в остаточных областях, при этом покрывающие воксел сегменты представляют собой сегменты первых и/или вторых вращательных рентгеновских сканирований, и эти сегменты содержат точки захвата, для которых воксел, который должен быть восстановлен, располагается в соответствующей первой и/или второй зоне визуализации конкретной точки захвата.
8. Способ (200) получения данных трехмерного рентгеновского изображения объекта, содержащий следующие этапы, на которых:
a) выполняют (210) первое вращательное рентгеновское сканирование (212) вокруг первого изоцентра;
b) выполняют (214) по меньшей мере второе вращательное рентгеновское сканирование (216) вокруг второго изоцентра;
при этом первый и второй центр вращения смещаются (218) относительно друг друга таким образом, что соединительная линия между первым и вторым изоцентрами расположена поперечно по отношению к первой и второй осям вращения, и
при этом выпуклая оболочка выполнена в виде расширенной трехмерной зоны визуализации, заключающей в себе первую зону визуализации и вторую зону визуализации, а также остаточные области, при этом остаточные области располагаются в выпуклой оболочке, но вне первой и второй зон визуализации.
9. Способ по п. 8, в котором первое вращательное рентгеновское сканирование на этапе а) выполняется по первой траектории; и второе вращательное рентгеновское сканирование на этапе b) выполняется по второй траектории, смещенной относительно первой траектории; при этом первая и вторая траектории имеют одну и ту же форму траектории.
10. Способ по п. 8 или 9, в котором обеспечено по меньшей мере одно из следующей группы:
i) первый и второй изоцентры смещаются таким образом, что первая и вторая зона визуализации соприкасаются друг с другом;
ii) первая и вторая оси вращения смещаются параллельно друг другу таким образом, что соединительная линия между первым и вторым изоцентрами располагается перпендикулярно к первой и второй осям вращения;
iii) первое и второе вращательные сканирования выполняют по дуге окружности, соответственно.
11. Способ по п. 8, в котором дополнительно для восстановления (226) первой зоны визуализации используют данные (228) проекций первого вращательного рентгеновского сканирования; и при этом для восстановления (230) второй зоны визуализации используются данные (232) проекций второго вращательного рентгеновского сканирования; и
при этом для восстановления (234) остаточных областей используют данные (236, 238) проекций по меньшей мере для одной части первой зоны визуализации и данные проекций по меньшей мере для одной части второй зоны визуализации.
12. Способ по п. 8, в котором для восстановления воксела в остаточных областях используют данные проекций покрывающих воксел сегментов; при этом покрывающие воксел сегменты представляют собой сегменты первых и/или вторых вращательных рентгеновских сканирований, причем упомянутые сегменты содержат точки захвата, для которых воксел, который должен быть восстановлен, располагается в соответствующей первой и/или второй зоне визуализации конкретной точки захвата.
13. Способ по п. 12, в котором для восстановления воксела в остаточных областях используют дифференцированные обратно спроецированные данные проекций вдоль покрывающих воксел сегментов.
14. Машиночитаемый носитель для системы рентгеновской визуализации с рамой С-типа, на котором сохранен компьютерный программный элемент для управления системой рентгеновской визуализации с рамой С-типа по одному из пп. 1-7, который при его выполнении процессором выполнен с возможностью выполнения этапов способа получения данных трехмерного рентгеновского изображения объекта по одному из пп. 8-13.
| US 2008037712 A1, 14.02.2008 | |||
| US 2008075225 A1, 27.03.2008 | |||
| US 7711083 B2, 04.05.2010 | |||
| С-ДУГА СО СЛОЖНЫМ ВРАЩЕНИЕМ | 2007 |
|
RU2458629C2 |

