Предпосылки создания изобретения
Настоящее изобретение относится в общем к устройству для открывания пакетов для загрузки материалов на автоматическом загрузочном устройстве. Используются многие типы автоматических загрузочных устройств для упаковывания материала в пакет. Например, автоматическое загрузочное устройство для птицы, описанное в опубликованной патентной заявке US №2008/0022636 A1, Two-in-One Bagger, раскрытие которой включено в данный документ путем ссылки, может быть использовано для упаковывания целой разделанной птицы, такой как курица, индейка или утка.
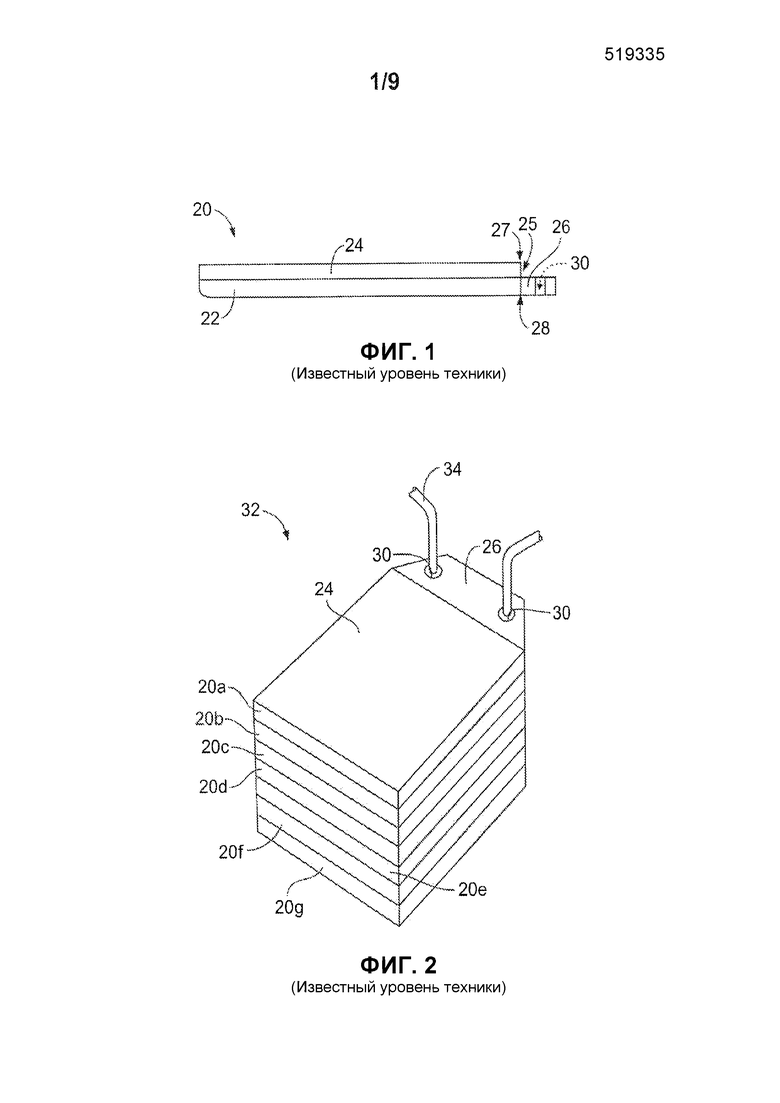
Пакеты, используемые в этих автоматических загрузочных устройствах, относятся к типу, который проиллюстрирован на Фиг. 1, где пакет 20 имеет нижний лист 22 и верхний лист 24, соединенные с нижних и боковых краев тепловой ультразвуковой сваркой или другими средствами, тем самым определяя отверстие 25 пакета 20. Отверстие 25 пакета 20 определено на верхнем крае или кромке 27 верхнего листа 24, но нижний лист 22 имеет участок 26, который продолжается за пределами кромки 27 верхнего листа 24. Линия 28 перфорации определяет границу между выступающим участком 26 нижнего листа 22 и остальной частью нижнего листа 22. В выступающем участке 26 нижнего листа 22 пробиты одно или более отверстий 30. Пакет 20 обычно представляет собой пластиковый пакет, который изготовлен из полиэтиленовой пленки. Пакет 20 может иметь 3-10% этиленвинилацетат (EVA) в качестве эластичного вещества.
В обычных известных операциях автоматической загрузки, как проиллюстрировано на Фиг. 2, множество пакетов 20 (изображенных как 20а, 20b, 20c и т.д.) обеспечены один поверх другого для образования стопки 32. Пакеты 20а, 20b, 20с и т.д. удерживаются вместе в стопке 32 посредством турникета 34, который проходит через отверстия 30 пакетов 20а, 20b, 20с и т.д. При использовании материала, такого как разделанная курица, загружается в верхний пакет 20а, а выступающий участок 26 отделяется от остальной части нижнего листа 22 по линии 28 перфорации, тем самым оставляя разделанную курицу упакованной в пакет 20а между нижним и верхним листами 22, 24. Выступающий участок 26 остается со стопкой 32 за счет турникета 34, продолжающегося через отверстия 30 выступающего участка 26. Выступающие участки 26 пакетов 20a, 20b, 20c и т.д. обычно удаляются, когда стопка 32 уменьшается.
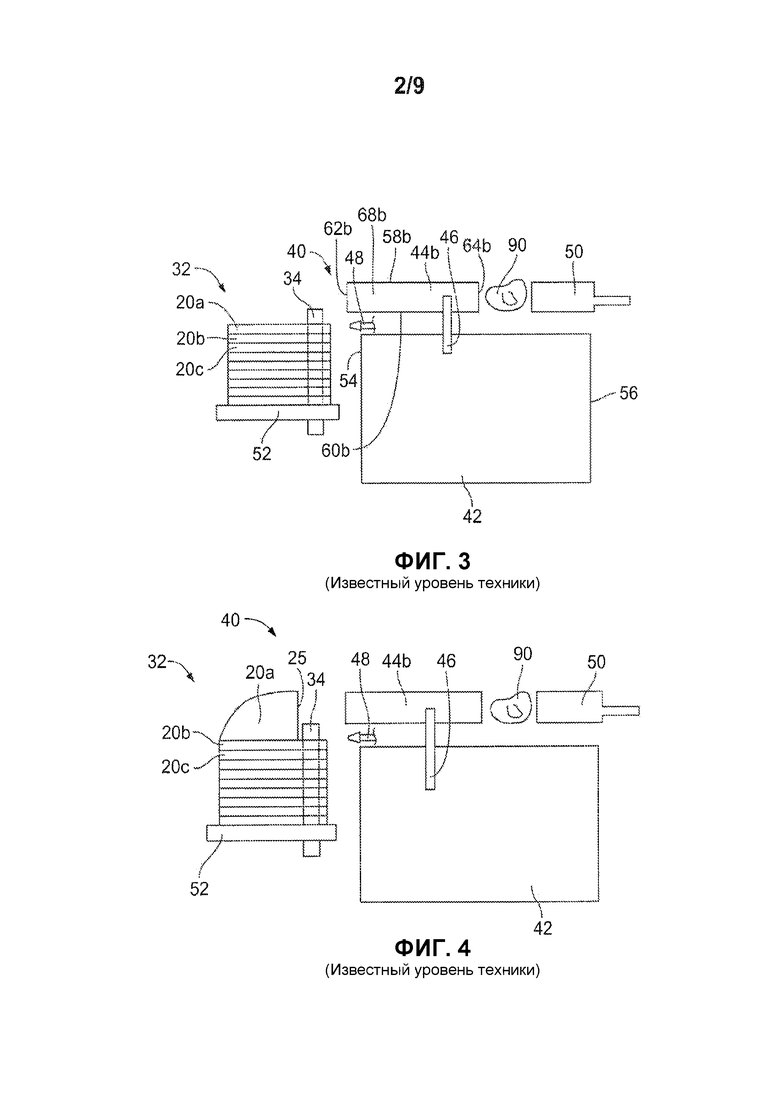
Традиционное автоматическое загрузочное устройство 40 для птицы, которое известно в уровне техники, показано на Фиг. 3-7. Загрузочное устройство 40 включает раму 42, пару горловин 44а, 44b, механизм 46 управления горловинами, воздушное сопло 48, толкатель 50 и узел 52 каретки пакета. Рама 42 имеет передний и задний концы 54, 56.
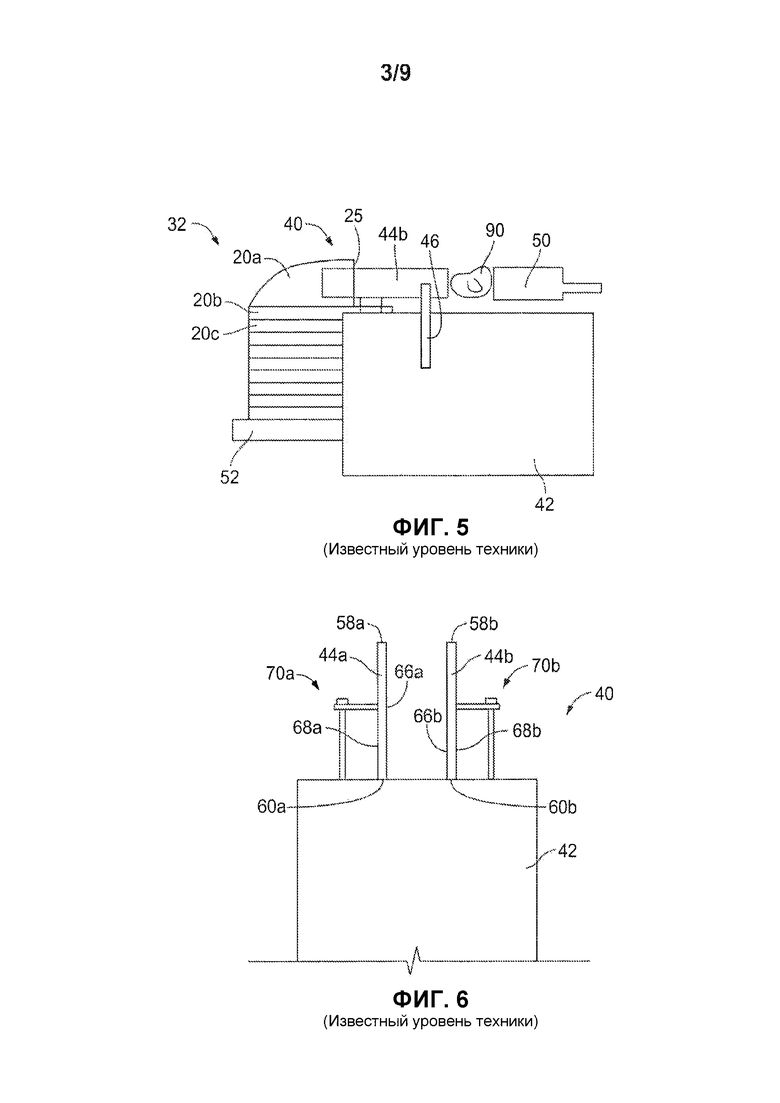
Каждая горловина 44a, 44b обычно образована из стали. Горловины 44a, 44b представляют собой зеркальные отображения друг друга. Таким образом, горловина 44а имеет верхний и нижний концы 58a, 60a, передний и задний концы 62a, 64a, внутреннюю и внешнюю поверхности 66a, 68a, а горловина 44b имеет верхний и нижний концы 58b, 60b, передний и задний концы 62b, 64b и внутреннюю и внешнюю поверхности 66b, 68b. Каждая горловина 44a, 44b установлена на раме 42 между ее передним и задним концом 54, 56 с помощью установочного узла 70a, 70b, при этом передние концы 62a, 62b горловин 44a, 44b расположены на или вблизи переднего конца 54 рамы 42.
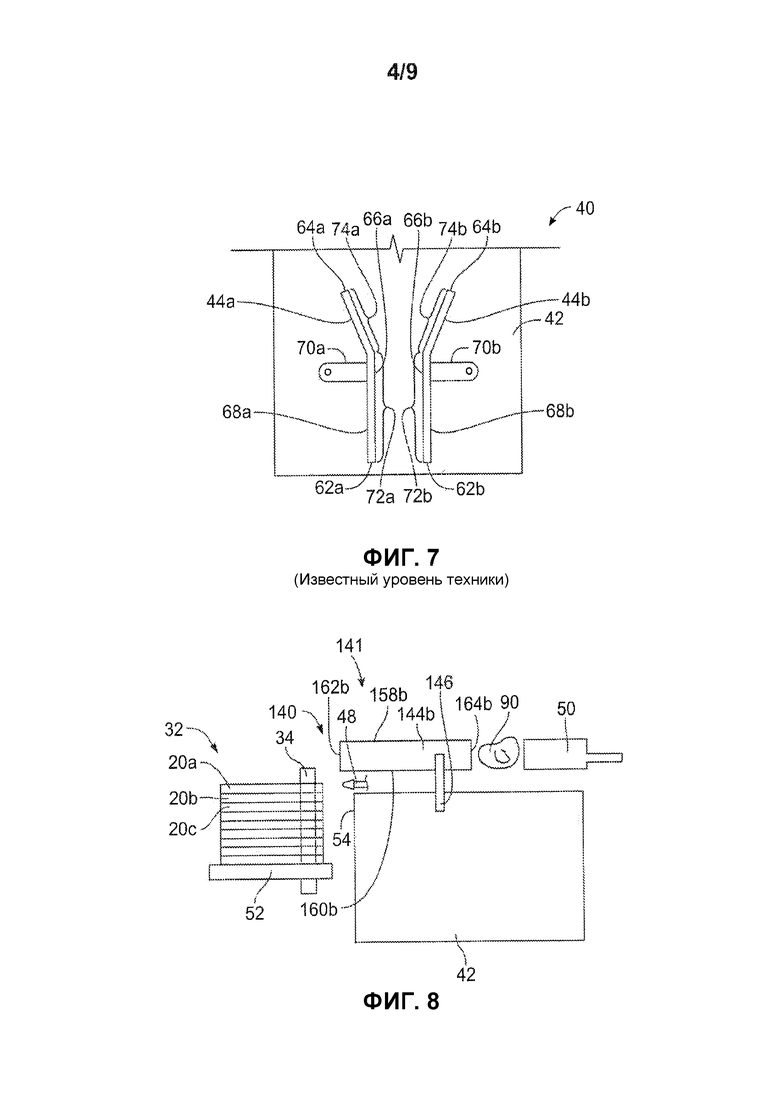
Каждая горловина 44a, 44b имеет передний участок 72a, 72b, который обеспечен впереди установочного узла 70a, 70b, и задний участок 74a, 74b, который обеспечен сзади установочного узла 70a, 70b. Задние участки 74a, 74b предпочтительно наклонены наружу относительно передних участков 72a, 72b. Альтернативно, горловины 44a, 44b могут быть частично изогнуты от передних концов 62a, 62b до задних концов 64a, 64b. Горловины 44a, 44b также могут быть частично изогнуты от верхних концов 58a, 58b до нижних концов 60a, 60b.
Механизм 46 управления горловинами выполнен с возможностью перемещать горловины 44a, 44b в плоскости обычно из первого положения, в котором внутренние поверхности 66a, 66b горловин 44a, 44b находятся вблизи друг друга, во второе положение, в котором внутренние поверхности 66a, 66b горловин 44a, 44b удалены друг от друга.
Воздушное сопло 48 обеспечено вблизи переднего конца 54 рамы 42, тогда как толкатель 50 обеспечен на или вблизи заднего конца 56 рамы 42. Узел 52 каретки пакета расположен спереди переднего конца 54 рамы 42. Узел 52 каретки пакета функционально связан с загрузочным устройством 40 и выполнен с возможностью скользить назад ниже переднего конца 54 рамы 42. Узел 52 каретки пакета включает турникет 34 так, что стопка 32 пакетов 20a, 20b, 20c и т.д. может быть расположена на нем и может удерживаться в рабочем положении турникетом 34.
При функционировании и как показано на Фиг. 3, курица 90 размещается сзади задних концов 64a, 64b горловин 44a, 44b и спереди толкателя 50 либо посредством ручного размещения, либо посредством автоматической подачи, такой как лента конвейера. Как показано на Фиг. 4, узел 52 каретки пакета поднимается, чтобы размещать верхний пакет 20a стопки 32 смежно с передними концами 62a, 62b горловин 44a, 44b. Воздушное сопло 48 направляет струю сжатого воздуха на кромку 27 верхнего листа 24 пакета 20а для того, чтобы немного приподнимать верхний лист 24 над нижним листом 22, таким образом увеличивая размер отверстия 25 пакета 20а.
Как показано на Фиг. 5, узел 52 каретки пакета скользит назад ниже переднего конца 54 рамы 42, протягивая верхний пакет 20а над и вокруг передних концов 62a, 62b горловин 44a, 44b. При верхнем пакете 20а, протянутом над и вокруг горловин 44a, 44b, механизм 46 управления горловинами заставляет горловины 44a, 44b перемещаться из первого положения (где внутренние поверхности 66a, 66b находятся вблизи друг друга) во второе положение (где внутренние поверхности 66a, 66b удалены друг от друга), тем самым растягивая отверстие пакета 20а. Далее толкатель 50 функционирует с возможностью осуществлять ход вперед для того, чтобы проталкивать курицу 90 между внутренними поверхностями 66a, 66b горловин 44a, 44b, через отверстие 25 пакета 20а и за передними концами 62a, 62b горловин 44a, 44b так, что курица 90 полностью располагается внутри пакета 20а. Во время этого процесса пакет 20а сжимается вокруг курицы 90. Далее толкатель 50 осуществляет обратный ход до его первоначального исходного положения и ожидает другую подаваемую курицу 90.
Следует понимать, что несмотря на то, что загрузочное устройство 40 и узел 52 каретки пакета известного уровня техники, проиллюстрированные на Фиг. 3-7, обеспечивают протягивание верхнего пакета 20a над и вокруг горловин 44a, 44b и далее перемещение горловин 44a, 44b плоским образом относительно друг друга, чтобы растягивать отверстие пакета 20а, другие узлы загрузочного устройства могут функционировать несколько другим образом для того, чтобы достигать такой же цели. Конкретнее, в других устройствах сами горловины могут быть перемещены в неподвижный пакет. В других известных устройствах горловины могут вращаться аксиально, а не в плоскости. В любом случае пакет должен быть достаточно открыт для того, что проходить над и вокруг горловин и/или вмещать горловины.
В традиционных загрузочных устройствах для птицы, таких как описанные выше, горловины 44a, 44b разводятся в стороны, чтобы растягивать отверстие верхнего пакета 20а. Когда курица 90 проталкивается в пакет 20а толкателем 50, верх и низ курицы 90 сталкиваются с пластиком пакета 20a, а стороны курицы 90 сталкиваются со сталью горловин 44a, 44b. В уровне техники известно, что потребители предпочитают приобретать сухую курицу, таким образом упаковщики в пакет курицы имеют маркетинговый стимул упаковывать курицу в пакет в сухом состоянии. Однако имеется достаточно высокий коэффициент трения между кожей сухой разделанной курицы (или другой птицы) и пакетом, изготовленным из полиэтилена или подобного пластика. Соответственно, существует тенденция либо застревания курицы в пакете 20а, либо разрывания пакета 20а, когда толкатель 50 проталкивает ее в пакет 20а, что значительно замедляет производство. Упаковщики курицы в пакеты могут улучшать ситуацию, упаковывая в пакет влажную курицу, но потребители этого не оценят. Подобные проблемы относятся к другому материалу, который упаковывается в пакет подобным образом.
Настоящее изобретение устраняет эти и другие недостатки известного уровня техники.
Сущность изобретения
Усовершенствованное устройство для открывания пакета для автоматического загрузочного устройства имеет горловины с вертикальными стенками и нижними стенками. Горловины перемещаются из первого смежного положения, в котором нижние стенки горловин полностью или почти полностью перекрываются, во второе удаленное положение, в котором нижние стенки горловин только слегка перекрываются или не перекрываются.
Краткое описание чертежей
Организация и вид конструкции и функционирования изобретения вместе с его дополнительными задачами и преимуществами могут быть лучше всего поняты при обращении к следующему далее описанию, взятому совместно с сопровождающими немасштабными чертежами, на которых одинаковые ссылочные позиции обозначают одинаковые элементы, на которых:
Фиг. 1 представляет собой вид сбоку известного пластикового пакета, используемого в операциях автоматической загрузки;
Фиг. 2 представляет собой вид в перспективе известной стопки пластиковых пакетов согласно Фиг. 1;
Фиг. 3 представляет собой схематический вид сбоку известного загрузочного устройства, использующего открыватель пакетов;
Фиг. 4 представляет собой схематический вид сбоку известного загрузочного устройства согласно Фиг. 3, когда верхний пакет немного приоткрыт;
Фиг. 5 представляет собой схематический вид сбоку известного загрузочного устройства согласно Фиг. 3, с верхним пакетом, частично протянутым над горловинами загрузочного устройства;
Фиг. 6 представляет собой частичный вид спереди известного загрузочного устройства согласно Фиг. 3;
Фиг. 7 представляет собой частичный вид сверху известного загрузочного устройства согласно Фиг. 3;
Фиг. 8 представляет собой схематический вид сбоку загрузочного устройства предпочтительного варианта выполнения настоящего изобретения, использующего открыватель пакетов;
Фиг. 9 представляет собой схематический вид сбоку загрузочного устройства согласно Фиг. 8, когда верхний пакет немного приоткрыт;
Фиг. 10 представляет собой схематический вид сбоку загрузочного устройства согласно Фиг. 8, с верхним пакетом, частично протянутым над горловинами загрузочного устройства;
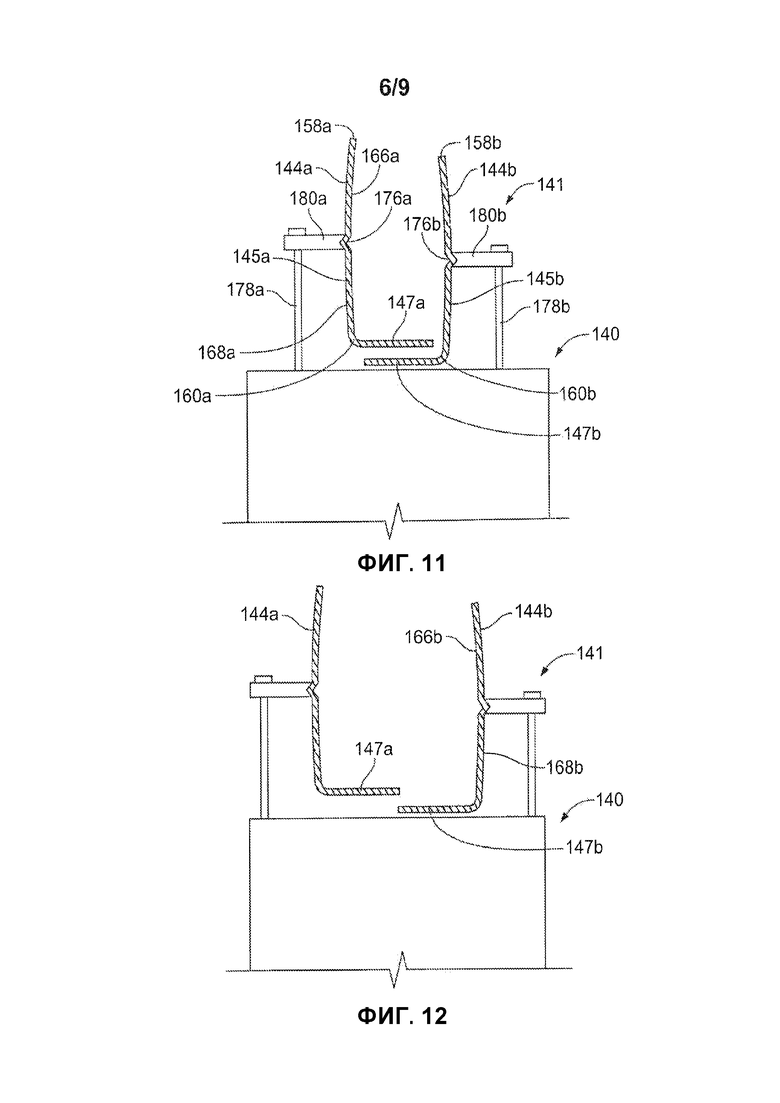
Фиг. 11 представляет собой частичный вид спереди загрузочного устройства согласно Фиг. 8, с горловинами, находящимися в первом положении;
Фиг. 12 представляет собой частичный вид спереди загрузочного устройства согласно Фиг. 8, с горловинами, находящимися во втором положении;
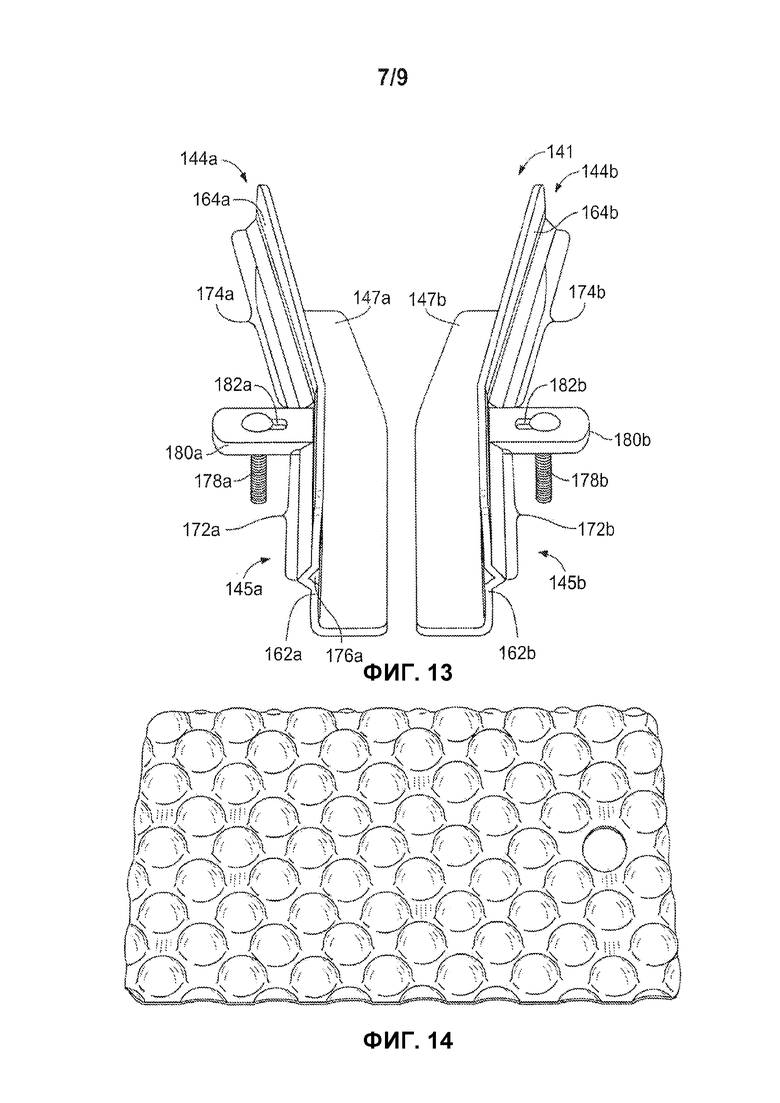
Фиг. 13 представляет собой вид сверху в перспективе горловин согласно Фиг. 8;
Фиг. 14 представляет собой чертеж одного типа текстурированной стали, которая используется в варианте выполнения настоящего изобретения.
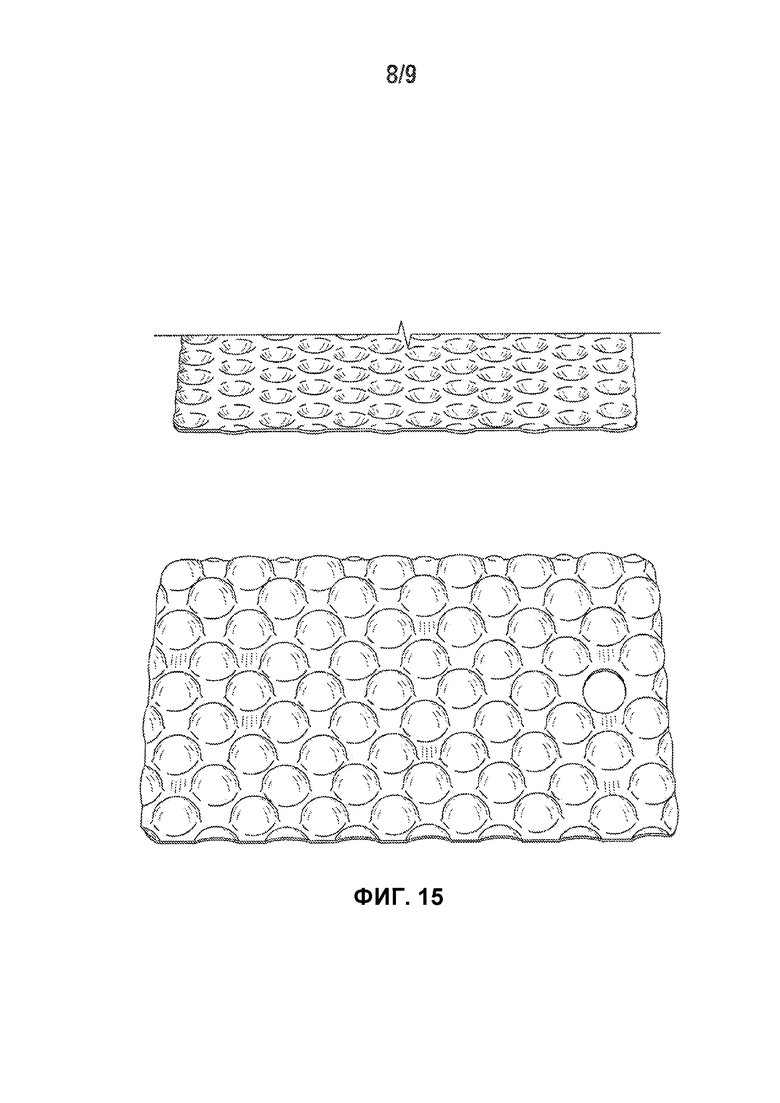
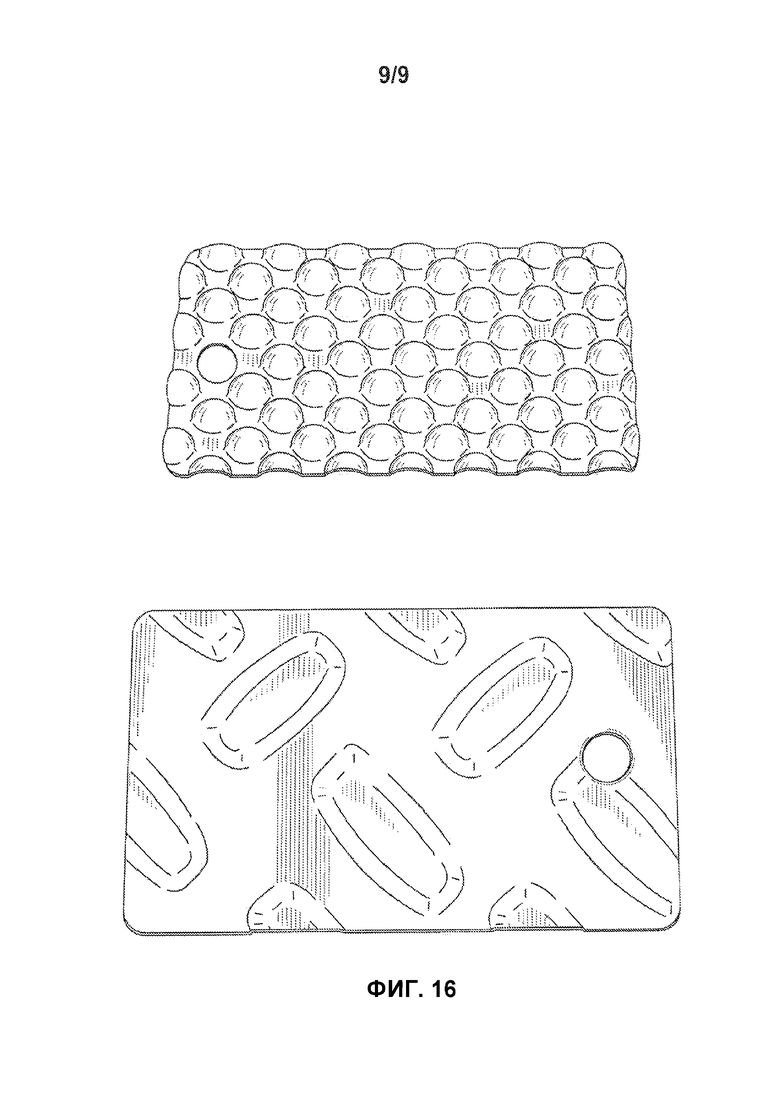
Фиг. 15 и 16 представляют собой чертежи других типов текстурированной стали, которые могут быть использованы в вариантах выполнения настоящего изобретения.
Подробное описание проиллюстрированных вариантов выполнения
Несмотря на то, что изобретение допускает его выполнение в различных формах, на чертежах показаны и здесь будут подробно описаны конкретные варианты выполнения исходя из предположения, что настоящее раскрытие следует рассматривать в качестве иллюстративного примера принципов изобретения и оно не предназначено для ограничения изобретения теми вариантами выполнения, которые проиллюстрированы и описаны в настоящем документе. Варианты выполнения настоящего изобретения будут описаны в виде части автоматического загрузочного устройства для птицы. Настоящее изобретение может быть использовано на загрузочных устройствах для упаковывания в пакет и/или упаковывания в сетку целой птицы, разделанной птицы или целых продуктов из мышечного мяса, в других применениях, в которых материал упаковывается в оболочку, пакет или сетку, таких как уплотнители, адгезивы и взрывчатые вещества, или для любого другого применения, в котором используются горловины, чтобы удерживать открытой оболочку, пакет или сетку для вставки материала.
Предпочтительный вариант выполнения усовершенствованного автоматического загрузочного устройства 140 включает устройство 141 для открывания пакета настоящего изобретения, которое описано и проиллюстрировано со ссылкой на Фиг. 8-13. Устройство 141 для открывания пакета включает пару горловин 144a, 144b, механизм 146 управления горловинами и установочный узел 170a, 170b. Другие конструктивные и функциональные аспекты автоматического загрузочного устройства 140, отличные от тех, которые связаны с устройством 141 для открывания пакета, идентичны аспектам автоматического загрузочного устройства 40 известного уровня техники и в связи с этим не будут снова обсуждаться здесь подробнее, за исключением тех случаев, когда указано иначе ниже.
Каждая горловина 144a, 144b обычно образована из стали. Каждая горловина 144a, 144b имеет вертикальную стенку 145a, 145b и нижнюю стенку 147a, 147b. Горловины 144a, 144b представляют собой зеркальные отображения друг друга. Таким образом, вертикальная стенка 145а горловины 144а имеет верхний и нижний концы 158а, 160а, передний и задний концы 162а, 164а и внутреннюю и внешнюю поверхности 166a, 168a, а вертикальная стенка 145b горловины 144b имеет верхний и нижний концы 158b, 160b, передний и задний концы 162b, 164b и внутреннюю и внешнюю поверхности 166b, 168b. Нижние стенки 147a, 147b горловин 144a, 144b продолжаются внутрь от нижних концов 160a, 160b, соответственно из вертикальных стенок 145a, 145b горловин 144a, 144b. Вертикальные стенки 145a, 145b предпочтительно немного изогнуты или являются дугообразными в поперечном сечении, обе от передних концов 162a, 162b до задних концов 164a, 164b и от верхних концов 158a, 158b до нижних концов 160a, 160b.
В предпочтительном варианте выполнения каждая из внутренних поверхностей 166a, 166b вертикальных стенок 145a, 145b предпочтительно имеет воздушные каналы 176a, 176b, образованные в ней, которые продолжаются от передних концов 162a, 162b до задних концов 164a, 164b. Воздушные каналы 176a, 176b предпочтительно являются V-образными по конфигурации и обеспечены в общем эквидистантно между верхними концами 158a, 158b и нижними концами 160a, 160b. Нижние стенки 147a, 147b предпочтительно являются плоскими.
Каждая горловина 144a, 144b предпочтительно имеет передний участок 172a, 172b и задний участок 174a, 174b. Задние участки 174a, 174b предпочтительно наклонены наружу относительно передних участков 172a, 172b, предпочтительно под углом приблизительно десять градусов.
Каждая горловина 144a, 144b установлена на раме 42 между ее передними и задними концами 54, 56 с помощью установочного узла 170a, 170b таким образом, что передние концы 162a, 162b горловин 144a, 144b расположены на или вблизи переднего конца 54 рамы 42. Каждый установочный узел 170a, 170b включает штырь 178a, 178b и установочный кронштейн 180a, 180b, имеющий щель 182a, 182b, образованную в нем.
Установочный кронштейн 180а предпочтительно продолжается латерально наружу из внешней поверхности 168а вертикальной стенки 154а горловины 144а. Установочный кронштейн 180а предпочтительно соединяется с горловиной 144а в или вблизи соединения переднего и заднего участков 172a, 174a горловины 144а. Штырь 178а продолжается через щель 182а установочного кронштейна 180а и далее прикрепляется к раме 42. Подобным образом установочный кронштейн 180b предпочтительно продолжается латерально наружу из внешней поверхности 168b вертикальной стенки 154b горловины 144b. Установочный кронштейн 180b предпочтительно соединяется с горловиной 144b в или вблизи соединения переднего и заднего участков 172b, 174b горловины 144b. Штырь 178b продолжается через щель 182b установочного кронштейна 180b и далее прикрепляется к раме 42. Установочный кронштейн 180a устанавливает горловину 144а в немного более высоком положении, чем установочный кронштейн 180b устанавливает горловину 144b. Эта конфигурация может быть выполнена различными путями, включая прикрепление штыря 178b немного ниже на раме 42 или добавление одной или более шайб (не показаны) между штырем 178b и установочным кронштейном 180b.
Механизм 146 управления горловинами предпочтительно представляет собой пневмоцилиндр, двигатель или подобное устройство, которое функционально связано по меньшей мере с одной из горловин 144a, 144b для того, чтобы перемещать или поворачивать в зависимости от точной требуемой конфигурации горловины 144a, 144b (как ранее указано, известно наличие горловин, перемещающихся плоским или вращательным образом относительно друг друга), из первого положения, где внутренние поверхности 166a, 166b вертикальных стенок 145a, 145b находятся вблизи друг друга, во второе положение, где внутренние поверхности 166a, 166b вертикальных стенок 145a, 145b удалены друг от друга. Когда внутренние поверхности 166a, 166b находятся вблизи друг друга, нижняя стенка 147а горловины 144а предпочтительно расположена над нижней стенкой 147b горловины 144b, как лучше всего проиллюстрировано на Фиг. 11. Однако, когда внутренние поверхности 166a, 166b удалены друг от друга, нижние стенки 147a, 147b горловин 144a, 144b больше не обеспечены по существу в перекрывающемся отношении, а точнее предпочтительно обеспечены смежно друг с другом (но при этом нижняя стенка 147а находится немного выше, чем нижняя стенка 147b), как лучше всего проиллюстрировано на Фиг. 12.
При функционировании и как показано на Фиг. 8-13, курица 90 размещается сзади задних концов 164a, 164b горловин 144a, 144b и спереди толкателя 50 либо посредством ручного размещения, либо посредством автоматической подачи, такой как лента конвейера. Как показано на Фиг. 9, узел 52 каретки пакета поднимается, чтобы размещать верхний пакет 20а стопки 32 смежно с передними концами 162a, 162b горловин 144a, 144b. Воздушное сопло 48 направляет струю сжатого воздуха на кромку 27 верхнего листа 24 пакета 20а для того, чтобы немного приподнимать верхний лист 24 над нижним листом 22, таким образом увеличивая размер отверстия 25 пакета 20а.
Как показано на Фиг. 10, узел 52 каретки пакета скользит назад ниже переднего конца 54 рамы 42, протягивая верхний пакет 20а над и вокруг передних концов 162a, 162b горловин 144a, 144b. С верхним пакетом 20а, протянутым над и вокруг горловин 144a, 144b, механизм 146 управления горловинами заставляет горловины 144a, 144b перемещаться из первого положения (где внутренние поверхности 166a, 166b находятся вблизи друг друга и где нижние стенки 147a, 147b находятся в положении перекрытия - Фиг. 11) во второе положение (где внутренние поверхности 166a, 166b удалены друг от друга и где нижние стенки 147a, 147b находятся в смежном положении - Фиг. 12), тем самым растягивая отверстие пакета 20а. Далее толкатель 50 функционирует с возможностью осуществлять ход вперед для того, чтобы проталкивать курицу 90 между внутренними поверхностями 166a, 166b горловин 144a, 144b, над и сверху нижних стенок 147а, 147b, через отверстие 25 пакета 20а и за передними концами 162a, 162b горловин 144a, 144b, так что курица 90 полностью располагается внутри пакета 20а. Во время этого процесса пакет 20а затягивается вокруг курицы 90. Далее толкатель 50 осуществляет обратный ход до его первоначального исходного положения и ожидает другую подаваемую курицу 90.
В загрузочном устройстве 140 для птицы, таком как описанное выше, горловины 144a, 144b разводятся (либо поворотным, либо плоским образом) с возможностью растягивать отверстие верхнего пакета 20а. По сравнению с загрузочным устройством 40 для птицы известного уровня техники, когда курица 90 проталкивается в пакет 20а толкателем 50, только верхняя часть курицы 90 может далее по возможности сталкиваться с пластиком пакета 20а. Нижняя часть курицы 90 будет скользить по нижним стенкам 147a, 147b горловин 144a, 144b, а стороны курицы 90 будут скользить по внутренним поверхностям 166a, 166b вертикальных стенок 154a, 154b горловин, тем самым минимизируя вероятность застревания курицы 90 в пакете 20а или разрывания пакета 20а так, что минимизируются нарушения в производстве.
Обеспечение воздушных каналов 176a, 176b в горловинах 144a, 144b также обеспечивает преимущество по сравнению с горловинами 44a, 44b известного уровня техники. Конкретнее, когда курица 90 перемещается в пакет 20а, обеспечение воздушных каналов 176a, 176b обеспечивает устранение участка воздуха в пакете 20а, когда курица 90 вставляется в него, тем самым предотвращая дополнительные возможные проблемы при упаковывании в пакет курицы 90, такие как вероятность лопания пакета 20а при упаковке в пакет курицы 90.
Следует понимать, что горловины 144a, 144b загрузочного устройства 140 могут быть использованы с использованием других типов загрузочных устройств 40 известного уровня техники, таких как описанные выше.
Следует понимать, что горловины 144a, 144b предпочтительно изготовлены из хорошо отполированной нержавеющей стали. Для операций загрузки продуктов питания нержавеющая сталь очевидно требуется государственным регулированием. Для других применений нержавеющая сталь может не требоваться, но является предпочтительной для простоты скольжения материала спереди толкателя 50.
В другом аспекте настоящего изобретения по меньшей мере участок внутренних поверхностей 166a, 166b вертикальных стенок 145a, 145b и нижние стенки 147a, 147b горловин 144a, 144b имеют углубления или текстуры. Предпочтительно, горловины 144a, 144b полностью образованы из текстурированной нержавеющей стали или нержавеющей стали с углублениями. Когда по меньшей мере внутренние поверхности 166a, 166b вертикальных стенок 145a, 145b и нижние стенки 147a, 147b имеют текстуры, сухая курица будет скользить еще более легко через горловины 144a, 144b. Предпочтительно, текстурированная нержавеющая сталь представляет собой ромбовидную текстурированную нержавеющую сталь, такую как HS Item Number R813000041, поставляемую McNichols Co., Tampa, Florida, или тип 4.WL, поставляемый Mechanical Metals, Newtown, Pennsylvania. Характерная ромбовидная текстура схематически показана на Фиг. 14. Также могут быть использованы другие текстуры, такие как текстуры, показанные в качестве примера, а не в качестве ограничения, на Фиг. 15 и 16.
Предпочтительно горловины 144a, 144b образованы с постоянной толщиной стенки, что будет обеспечивать выдавливание текстур или углублений на всей или на участке внутренней поверхности стали.
В другом аспекте изобретения по меньшей мере на участок внутренних поверхностей 166a, 166b вертикальных стенок 145a, 145b и нижние стенки 147a, 147b горловин 144a, 144b заделано, наложено, нанесено в виде покрытия или иным образом нанесено скользкое синтетическое вещество, означающее вещество, которое имеет более низкий коэффициент трения с загружаемым материалом, чем имеет гладкая нержавеющая сталь и загружаемый материал. Наиболее предпочтительно, вещество представляет собой термопластичный полимер, предпочтительно политетрафторэтилен, наиболее предпочтительно, один из материалов, продаваемых под торговым названием Teflon® E. I. du Pont de Nemours and Company или ее дочерними предприятиями. Также может быть использовано любое другое скользкое вещество. Использование скользкого синтетического вещества будет улучшать упаковывание в пакет сухой птицы. Тем не менее, устройство также может быть использовано с влажной птицей и в связи с этим будет более полезно для пользователей, чем устройство, которое может быть использовано только с чем-то одним.
Несмотря на то, что показаны и описаны предпочтительные варианты выполнения настоящего изобретения, предусматривается, что специалист в области техники может разрабатывать различные преобразования настоящего изобретения без отклонения от замысла и объема охраны приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВНО РЕГУЛИРУЕМАЯ ПО ВЫСОТЕ ОПОРА МАТРАСА И УСТРОЙСТВО ДЛЯ ТАКОГО РЕГУЛИРОВАНИЯ | 2008 |
|
RU2505261C2 |
| РОТОР ТУРБОМАШИНЫ И ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2012 |
|
RU2607986C2 |
| УСТРОЙСТВО ДЛЯ СЕПАРАЦИИ ИЗБЫТОЧНО РАСПЫЛЕННОГО ЛАКА | 2009 |
|
RU2507010C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ БИОЛОГИЧЕСКИМИ ТЕКУЧИМИ СРЕДАМИ, ПРОСАЧИВАЮЩИМИСЯ ИЗ РАЗРЕЗА ДЛЯ ХИРУРГИЧЕСКОЙ ДРЕНАЖНОЙ ТРУБКИ | 2019 |
|
RU2742709C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ БИОЛОГИЧЕСКИМИ ТЕКУЧИМИ СРЕДАМИ, ПРОСАЧИВАЮЩИМИСЯ ИЗ РАЗРЕЗА ДЛЯ ХИРУРГИЧЕСКОЙ ДРЕНАЖНОЙ ТРУБКИ | 2018 |
|
RU2743017C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2703100C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2701999C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710413C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710412C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710508C1 |

Группа изобретений относится к устройствам и способу для открывания пакета при загрузке в него продукта, в частности птицы. Каждая пара горловин устройства для открывания пакета содержит вертикальную стенку, имеющую верхний и нижний концы, передний и задний концы, внутреннюю и внешнюю поверхности и нижнюю стенку, которая продолжается внутрь от нижнего конца вертикальной стенки. Причем одна горловина из пары горловин расположена немного выше, чем другая горловин, а внутренняя поверхность вертикальной стенки имеет сформированные в ней воздушные каналы, проходящие от переднего конца к заднему. Изобретением является также устройство для открывания пакета, автоматическое загрузочное устройство и способ упаковывания в пакет продукта, содержащие вышеописанную пару горловин. Группа изобретений обеспечивает повышение качества. 4 н. и 11 з.п. ф-лы, 16 ил.
1. Пара горловин устройства для открывания пакета, причем каждая из указанных горловин содержит:
вертикальную стенку, имеющую верхний и нижний концы, передний и задний концы и внутреннюю и внешнюю поверхности; и
нижнюю стенку, которая продолжается внутрь от нижнего конца вертикальной стенки,
причем одна горловина из пары горловин находится немного выше, чем другая горловина из пары горловин, и
при этом внутренняя поверхность вертикальной стенки имеет сформированные в ней воздушные каналы, которые проходят от переднего конца к заднему концу.
2. Пара горловин по п. 1, в которой вертикальная стенка по меньшей мере частично изогнута между верхним и нижним концами.
3. Пара горловин по п. 1, в которой вертикальная стенка по меньшей мере частично изогнута между передним и задним концами.
4. Пара горловин по п. 1, в которой вертикальная стенка определяет передний участок и задний участок, причем передний участок продолжается от заднего участка до переднего конца и задний участок продолжается от переднего участка до заднего конца, при этом задний участок наклонен относительно переднего участка.
5. Пара горловин по п. 1, в которой внутренняя поверхность вертикальной стенки определяет канал, который продолжается приблизительно от переднего конца до приблизительно заднего конца.
6. Пара горловин по п. 1, в которой по меньшей мере участок внутренней поверхности содержит текстуры.
7. Пара горловин по п. 1, в которой по меньшей мере участок внутренней поверхности покрыт скользким синтетическим веществом.
8. Пара горловин по п. 7, в которой вещество содержит термопластичный полимер.
9. Пара горловин по п. 8, в которой термопластичный полимер содержит политетрафторэтилен.
10. Устройство для открывания пакета, содержащее:
пару горловин по п. 1;
установочный узел, выполненный с возможностью устанавливать пару горловин в требуемом положении для обеспечения того, что внутренние поверхности вертикальных стенок пары горловин обращены друг к другу, причем установочный узел дополнительно выполнен с возможностью устанавливать одну из пары горловин выше другой из пары горловин; и
механизм управления горловинами, который выполнен с возможностью перемещать передний конец по меньшей мере одной из пары горловин близко к переднему концу по меньшей мере другой из пары горловин, причем во время такого перемещения нижняя стенка одной из пары горловин будет перемещаться в общем в положение перекрытия относительно нижней стенки другой из пары горловин за счет того, что одна из пары горловин установлена выше другой из пары горловин.
11. Устройство для открывания пакета по п. 10, в котором вертикальная стенка каждой горловины определяет передний участок и задний участок, причем передний участок продолжается от заднего участка до переднего конца и задний участок продолжается от переднего участка до заднего конца, причем задний участок наклонен относительно переднего участка.
12. Устройство для открывания пакета по п. 10, в котором вертикальная стенка каждой горловины определяет передний участок и задний участок, причем передний участок продолжается от заднего участка до переднего конца и задний участок продолжается от переднего участка до заднего конца, при этом к каждой горловине прикреплен установочный узел вблизи соединения переднего и заднего участков.
13. Устройство для открывания пакета по п. 10, в котором вертикальная стенка каждой горловины определяет передний участок и задний участок, причем передний участок продолжается от заднего участка до переднего конца и задний участок продолжается от переднего участка до заднего конца, при этом механизм управления горловинами функционально связан с задним участком по меньшей мере одной из горловин.
14. Автоматическое загрузочное устройство, содержащее:
раму, имеющую передний и задний концы;
узел каретки пакета, обеспеченный вблизи переднего конца рамы;
толкатель, установленный на раме вблизи ее заднего конца; и
устройство для открывания пакета по п. 10, в котором установочный узел установлен на раме между ее передним и задним концами таким образом, что задние концы пары горловин обеспечены спереди толкателя, а передние концы пары горловин выполнены с возможностью функционально связываться с узлом каретки пакета.
15. Способ упаковывания в пакет материала, причем способ содержит этапы, на которых:
a) обеспечивают автоматическое загрузочное устройство, имеющее узел каретки пакета и пару горловин, причем узел каретки пакета выполнен с возможностью обеспечивать пакет, в который необходимо вводить материал, и каждая указанная горловина имеет вертикальную стенку и нижнюю стенку, где указанная вертикальная стенка имеет верхний и нижний концы, передний и задний концы и внутреннюю и внешнюю поверхности, а указанная нижняя стенка продолжается внутрь от нижнего конца вертикальной стенки, причем внутренние поверхности вертикальных стенок пары горловин обращены друг к другу и внутренняя поверхность вертикальной стенки имеет сформированные в ней воздушные каналы, которые проходят от переднего конца к заднему концу;
b) размещают упаковываемый в пакет материал сзади задних концов горловин;
c) открывают пакет;
d) заставляют передние концы пары горловин размещаться внутри отверстия пакета, причем нижние стенки горловин в общем находятся в перекрывающейся конфигурации;
e) заставляют передние концы по меньшей мере одной из пары горловин перемещаться в сторону от другой из пары горловин для того, чтобы растягивать отверстие пакета, причем нижние стенки горловин перемещаются в общем в неперекрывающуюся конфигурацию; и
f) перемещают упаковываемый в пакет материал над нижними стенками горловин, за передние концы горловин и в пакет.
| ИНФРАКРАСНЫЙ ИЗЛУЧАТЕЛЬ | 2003 |
|
RU2237946C1 |
| ПРЯМОЙ ЛАМИНИРОВАННЫЙ ПОЛ | 1999 |
|
RU2256043C2 |
| US 4432188 A, 21.02.1984 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Устройство для открывания полиэтиленовых мешков | 1980 |
|
SU948776A1 |

