Область техники, к которой относится изобретение
Настоящее изобретение относится к области тренажерного оборудования и интерфейсов виртуальная реальность - человек. Более конкретно, изобретение относится к универсальной опорной системе для поддержки велотренажера и к системе виртуальной реальности и тренировки.
Предшествующий уровень техники
Известны различные варианты тренажерных устройств в форме стационарных велосипедов. Один такой пример в хорошо разработанной форме описан в патенте США № 8251874 В2, выданном Ashby et al. В нем описана тренажерная система со смоделированной местностью из реального мира.
В US №8251874 В2, описана тренажерная система, которая содержит одно или более тренажерное устройство, которое поддерживает связь по сети с коммуникационной системой. Коммуникационная система хранит и/или генерирует программы упражнений для использования на тренажерном устройстве. Программы упражнений способны управлять одним или более оперативным параметром тренажерного устройства для имитации местности, находящейся в удаленном месте в реальном мире. Программы упражнений могут содержать изображения/видеозаписи этого удаленного места в реальном мире. Управляющие сигналы и изображения/видеозаписи могут синхронизироваться так, чтобы пользователь тренажерного устройства мог через изменяющиеся оперативные параметры ощущать топографические характеристики места в реальном мире, а также наблюдать изображения этого места.
В сумме, US №8251874 В2 раскрывает в системе из одного или более тренажерных устройств управление одним или более оперативным параметром тренажерного устройства для имитации местности, находящейся в удаленном реальном мире, с синхронизированными управляющими сигналами и изображениями/видеозаписями.
В US №8251874 В2 раскрываются устройства, содержащие один или более двигатель или другие электрические приводные устройства для управления одним или более оперативным параметром тренажерного устройства. Кроме того, разработан велотренажер, в котором величина торможения маховика может изменять скорость, с которой пользователь может нажимать на педали, и/или сопротивление, испытываемое пользователем при нажатии на педали, чтобы имитировать типы сопротивления и скорости нажатия на педали, испытываемые пользователем при езде на велосипеде вне помещения.
Этот предшествующий патент, в дополнение к способности управлять скоростью и сопротивлением педального узла и изменять их, также раскрывает то, что велотренажер обеспечивает возможность наклона верхней опорной рамы относительно пола или другой поверхности, на которую опирается велотренажер.
Хотя в этом документе раскрыта хорошо разработанная тренажерная система, в ней отсутствует возможность легкой приспосабливаемости к разным средам и она весьма ограничена по типу синхронизируемых параметров. Это ограничение является недостатком, который ограничивает чувство «реальности» у пользователя в системе виртуальной реальности.
Основной недостаток заключается в том, что велотренажеры по предшествующему уровню техники, а также связанные с ними тренажерные устройства являются слишком дорогостоящими. Для того, чтобы получить функциональность тренажерного устройства по предшествующему уровню техники, нужно купить все это устройство. Это может быть приемлемо для частных покупок, но становится запретительно дорого для гимнастических залов и студий, в которых нужно множество таких устройств.
Краткое описание сущности изобретения
Целью настоящего изобретения является создание опоры для тренажерного устройства и полностью интегрированной тренажерной системы с виртуальной реальностью, в которой устранены различные недостатки известных устройств этого общего типа и которая обладает возможностью легкой адаптируемости к существующим системам, возможностью легкого встраивания в существующие тренажерные залы или для частного использования, и систему с хорошо разработанными возможностями ощущения виртуальной реальности.
Для достижения этих и других целей согласно настоящему изобретению предлагается узел платформы для поддержки тренажерного оборудования, такого как велотренажер, содержащий:
нижний короб с четырьмя угловыми опорами регулируемой высоты для поддержки узла платформы на, по существу, ровной поверхности пола;
платформу, опирающуюся на нижний короб и несущую крепежные устройства для жесткого крепления тренажерного оборудования на платформе, при этом платформа определяет продольное направление, по существу, вдоль ее центральной оси и перпендикулярное ему поперечное направление;
подъемный механизм, расположенный в нижнем коробе и выполненный с возможностью выборочного подъема передней части платформы относительно нижнего короба для наклона платформы в переднем направлении или для подъема задней части платформы относительно нижнего короба для опускания платформы в переднем направлении;
контроллер, поддерживающий связь с четырьмя угловыми опорами регулируемой высоты и с подъемным механизмом, при этом контроллер выполнен с возможностью удаленно приводить в действие подъемный механизм для выборочного наклона или опускания платформы, и с возможностью удаленно приводить в действие каждую из угловых опор для выборочного подъема или опускания нижнего короба на соответствующем его углу.
Новая система по настоящему изобретению обеспечивает полную функциональность тренажерных устройств за счет возможности модернизации. Вместо покупки большого количества соответствующих устройств, согласно настоящему изобретению можно установить уже существующие устройства (в любом требуемом количестве) на функциональные опорные платформы (в любом требуемом количестве). Таким образом, платформа является функциональной платформой, дающей универсальное решение. На универсальную платформу можно установить любое тренажерное устройство любого типа, которое уже может иметься в тренажерном зале. Для новых закупок также новая система платформы дает полную возможность выбора любого из разнообразных тренажерных устройств, имеющихся на рынке и, затем, установить их на новую универсальную платформу.
Согласно дополнительному признаку настоящего изобретения каждая из угловых опор содержит несущий блок, жестко установленный на нижнем коробе, в несущем блоке установлена надувная подушка и штуцер для соединения по текучей среде надувной подушки с источником сжатого воздуха для надувания подушки и, тем самым, подъема несущего блока и нижнего короба относительно поверхности пола.
Согласно дополнительному признаку изобретения угловые опоры имеют кронштейн, жестко соединенный с несущим блоком, при этом платформа имеет жесткую раму, которая в положении покоя платформы опирается на все четыре несущих блока, а когда платформа наклонена, опирается на два несущих блока двух задних угловых опор, а когда платформа опущена, опирается на два несущих блока двух передних угловых опор.
Согласно другому признаку изобретения подъемный механизм содержит:
рычажный механизм, образованный первой и второй тягами на заднем конце платформы, при этом рычажный механизм установлен на поворотной оси так, что первая и вторая тяги охватывают угол прибл. 90° при виде сбоку, при этом поворотная ось установлена с возможностью вращения на нижнем коробе, и вторая тяга имеет свободный конец, соединенный с платформой, в котором, по существу, горизонтальное движение свободного конца первой тяги преобразуется в, по существу, вертикальное движение свободного конца второй тяги для подъема платформы на переднем конце или на заднем конце;
двигатель и ходовой винт, приводимый в действие двигателем для выборочного вращения влево или вправо, при этом ходовой винт проходит, по существу, вдоль продольного направления;
блок толкателя, расположенный для зацепления с ходовым винтом и для движения вдоль ходового винта, когда ходовой винт вращается; и
толкающий/тянущий блок, расположенный на передней грани блока толкателя и толкающий/тянущий блок, расположенный на задней грани блока толкателя, при этом каждый толкающий/тянущий блок соединен для перемещения свободного конца соответствующей соединенной первой тяги при толкании блоком толкателя для подъема либо переднего конца платформы, либо заднего конца платформы.
Согласно еще одному дополнительному признаку изобретения угловые опоры содержат надувные подушки, которые при надувании поднимают соответствующий угол нижнего короба на заданное расстояние от поверхности пола и в котором при надутых надувных подушках нижний короб поднят над поверхностью пола и поддерживается, по существу, горизонтально и амортизируется надувными подушками, при этом с каждой из надувных подушек соединен по текучей среде источник сжатого воздуха, и подъемный механизм выполнен с возможностью наклонять или опускать платформу независимо от надувания или сдувания надувных подушек.
Для достижения вышеописанных и других целей согласно настоящему изобретению также предлагается конфигурация тренажерного зала, содержащая:
экран дисплея и видеосистема для отображения движущихся изображений на экране дисплея;
множество узлов платформы, каждый из которых соответствует вышеприведенному описанию, расположенных так, чтобы быть обращенными к экрану дисплея, и велотренажер, установленный на каждом из узлов платформы;
контроллер, соединенный с видеосистемой и с каждым из узлов платформы, при этом контроллер управляет выборочным надуванием и сдуванием надувных подушек и выборочным подъемом и опусканием платформы подъемным механизмом синхронно с содержимым движущихся изображений, отображаемых на экране дисплея.
Первостепенное значение имеет вариант реализации изобретения, в которой имеется система с большим экраном - предпочтительно шириной несколько метров - и множество платформ, обращенных к экрану. Каждая из платформ образует опору для тренажерного устройства, такого как стационарный велосипед, используемый в залах велотренажеров. Платформы могут наклоняться вокруг поперечной оси (т.е., по существу, перпендикулярно переднему направлению) и вокруг продольной оси; они могут совершать колебания с разной частотой и они могут смещаться вбок, по существу, параллельно поперечной оси.
Предпочтительными тренажерными устройствами являются велотренажеры (например, такие, которые имеются в существующих расположенных в помещениях залах велотренажеров), которые работают в среде виртуальной реальности, синхронно с видеоизображением реального маршрута, которое проецирует контроллер, координирующий события, синхронизированные с событиями в видеофильме.
Платформы, на которых расположены тренажерные устройства (напр., велотренажеры) оснащены приводами, работающими по сигналам от главного компьютера для подъема или опускания уровня возвышения велотренажера, для колебаний платформы, для бокового движения и для создания переменной силы сопротивления на маховике для имитации наклона, синхронизированной с наклоном на проецируемом видеофильме реального маршрута, при этом все велотренажеры работают на одном и том же уклоне и движутся по одному и тому же проецируемому маршруту.
Экран дисплея, на котором воспроизводится видеоизображение реального маршрута, является либо изогнутым экраном, либо стеной зала, на которую проецируется фильм (и дополнительные сообщения, например, параметры тренировки и реклама). Дисплей также может быть активным дисплеем, образованным множеством телевизионных дисплеев, расположенных так, чтобы образовать единый экран и показывать на каждом дисплее синхронизированные части изображения. Экран, предпочтительно, частично охватывает велотренажеры, чтобы у участников тренировки возникло чувство реального вида, при этом используется звук в формате объемного звучания. Кроме того, можно использовать дополнительную визуальную стимуляцию - например, лазерные машины, испускающие лазерные лучи, создавая ощущение ночного клуба - для стимуляции тренировочных усилий человека. Если желательна проекция на стену зала, стену предпочтительно покрывают/красят материалом с высокой отражающей способностью, который особенно пригоден для этой цели. Можно также использовать две стены, встречающиеся на углу, чтобы отображать одну проекцию или две проекции.
Предлагается также аудиосистема, предпочтительно система объемного звучания. Также следует понимать, что каждая станция может быть оборудована собственным потоком аудио. Поток аудио может подаваться через гнездо для подключения наушников и один или два органа управления для громкости звука и, факультативно, для управляемой пользователем комбинации звуков местности и ветра (т.е. звуковое сопровождение видеофильма), а также поток может содержать звук по выбору пользователя.
Платформы оснащены синхронизированным двигателем подъемника, который отражает текущий наклон местности, демонстрируемой на видео. Также имеется вторая система подъемника для бокового движения (влево/вправо) опорной платформы, которые напоминают реальные движения велосипедиста на дороге, когда он/она работает педалями. Вариант с "мягкой" надувной опорой для ног обеспечивает особенно приближенное к реальности поведение велотренажера, позволяющее пользователю легко отклоняться влево/вправо. Эти два движения накладываются одно на другое. Наконец, может быть установлен "шейкер" или вибратор, который создает реалистичное чувство контакта с землей между велосипедом и поверхностью, по которой он движется. Вибратор может иметь переменную частоту для того, чтобы имитировать различные покрытия (напр., низкую частоту для гравия, более высокую частоту для асфальта и т.д.).
Видео имеет временной код. Сигнал кода посылается беспроводным образом (предпочтительно, по протоколу Bluetooth) с главного контроллера дисплея на каждую из платформ. Разумеется, можно также каждую из платформ подсоединить проводами.
Экран видео дисплея, кроме того, можно эффективно использовать для рекламы, которая накладывается на дисплей или даже высвечивается во время видеофильма.
Для создания системой еще более реалистичного чувства на полу или на платформе спереди установлены нагнетательные вентиляторы, чтобы создать впечатление набегающего воздушного потока на "виртуально" движущегося велосипедиста. Вентиляторы также могут быть синхронизированы с дисплеями либо они могут быть соединены с таймером, запрограммированным для работы с разной интенсивностью, как запрограммировано оператором.
Другие признаки, считающиеся отличительными для настоящего изобретения, изложены в прилагаемой формуле изобретения.
Хотя настоящее изобретение проиллюстрировано и описано на примере опорной платформы и тренажерной системы виртуальной реальности, тем не менее, оно не ограничивается показанными деталями, поскольку в него могут быть внесены различные модификации и структурные изменения, не выходящие за пределы изобретательской идеи и объема и диапазона эквивалентов формулы изобретения.
Конструкция и способ работы изобретения вместе с дополнительными его целями и преимуществами будут более понятны из нижеследующего описания конкретных вариантов со ссылками на приложенные чертежи.
Краткое описание чертежей
Фиг.1 - вид снизу в перспективе иллюстративного варианта узла платформы по настоящему изобретению.
Фиг.2 - вид сверху в перспективе узла платформы.
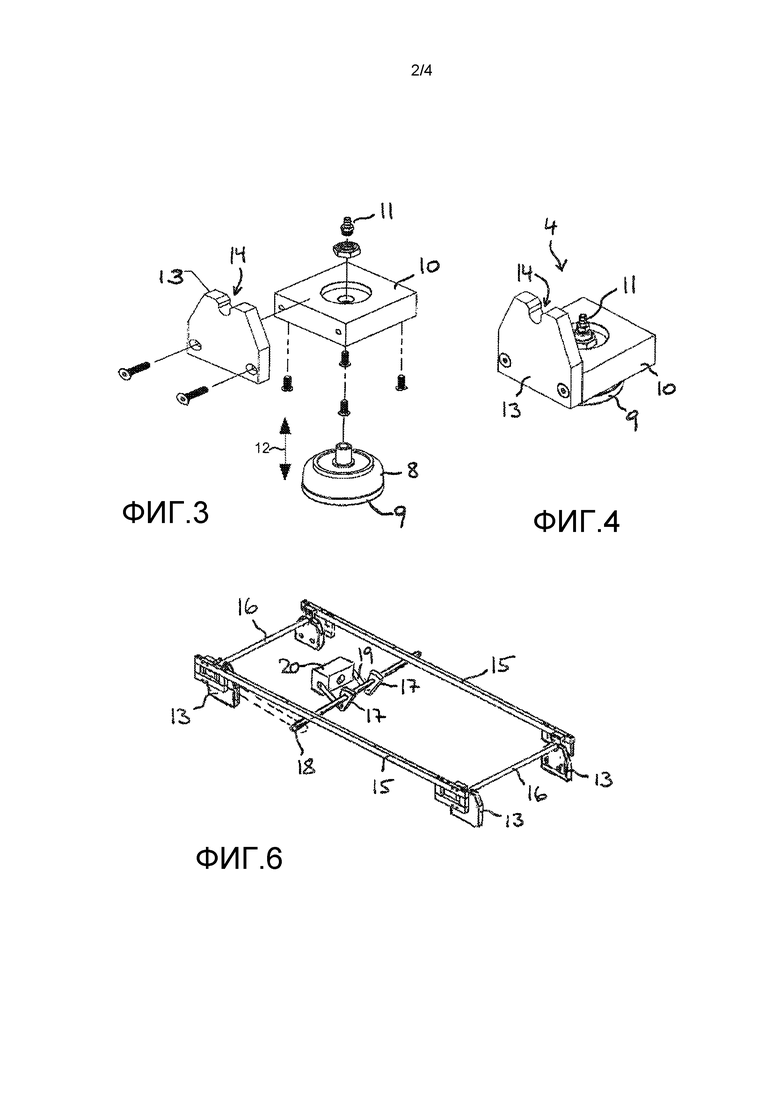
Фиг.3 - разнесенный вид надувной угловой опоры.
Фиг.4 - вид в перспективе угловой опоры.
Фиг.5 - вид сбоку рамы опорной платформы и тяги и механизм подъемного устройства платформы.
Фиг.6 - вид в перспективе приводного механизма подъемного механизма.
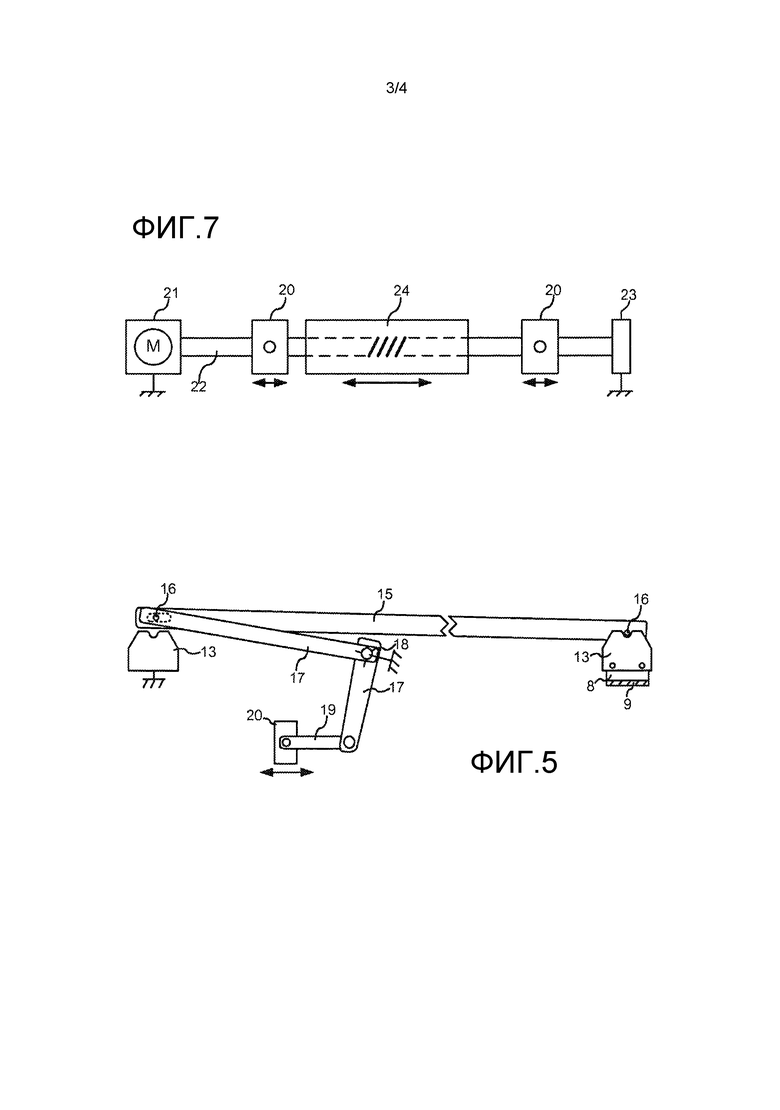
Фиг.7 - схематический вид сбоку приводного механизма подъемного механизма.
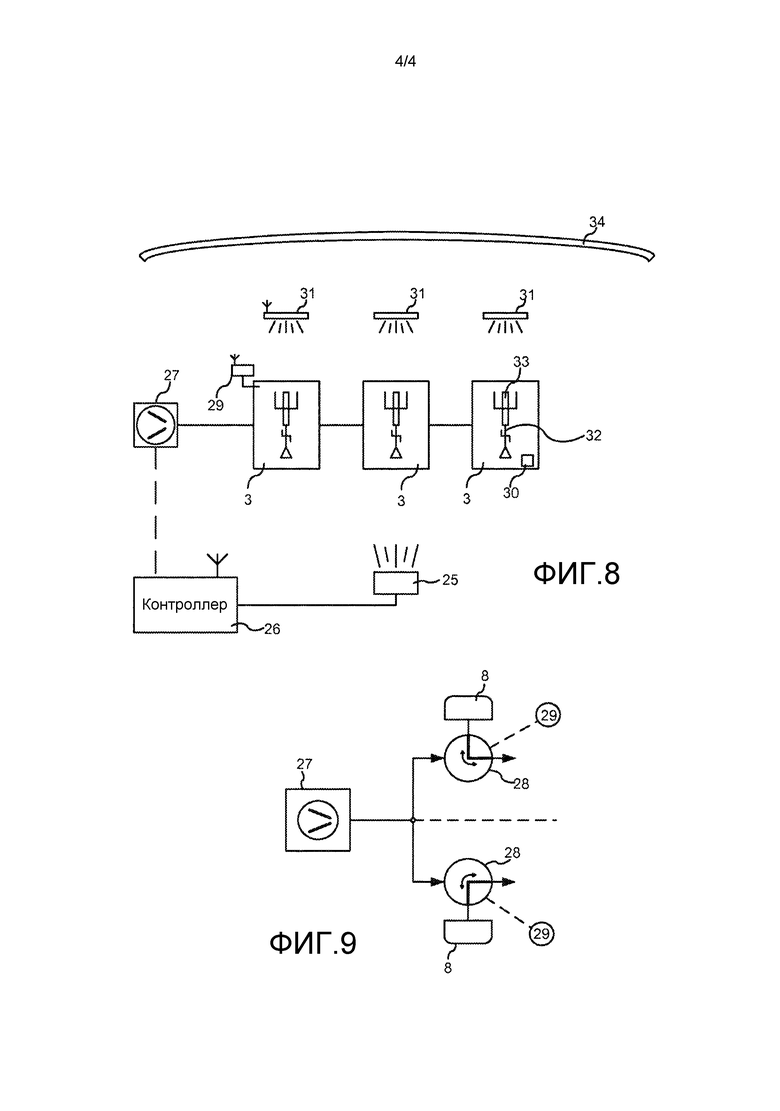
Фиг.8 - схематический вид сверху тренажерного зала с тремя тренажерами и дисплеем и управляющим оборудованием.
Фиг.9 - пневматическая схема, иллюстрирующая два из множества управляемых клапанов надувания/сдувания.
Описание вариантов
На чертежах и, в первую очередь, на фиг.1 и 2, подробно показан иллюстративный вариант узла 1 платформы по настоящему изобретению. Узел 1 платформы, по существу, выполнен прямоугольным, в котором длинные стороны приблизительно вдвое длиннее коротких сторон. Узел 1 платформы на фиг.1 показан снизу, а на фиг.2 - сверху. Узел платформы содержит нижний короб 2, в котором размещены различные механические элементы, которые будут описаны ниже, и опорную платформу 3. Имеется четыре угловых опоры 4, которые в предпочтительном варианте выполнены с надувными подушками или надувными резиновыми ножками. Назначение этих опор будет понятно из нижеследующего описания. Платформа 3 имеет четыре крепежных кронштейна 5 для крепления тренажера, например велотренажера. Имеется также пара ручек 6 спереди и пара роликов 7 сзади. Эти приспособления позволяют перемещать узел платформы относительно легко.
На фиг.3 и 4 показаны сборочные единицы надувной угловой опоры 4. Угловая опора 4 имеет надувную подушку 8 и опорную ножку 9, например, не скользящую резиновую опору. Надувная подушка 8 установлена в блоке 10, в котором сформировано седло, в которое частично вставлена надувная подушка 8. Штуцер 11 соединен с внутренним пространством надувной подушки и позволяет ее надувать или сдувать. При надувании надувная подушка 8 расширяется в направлении, показанном стрелкой 12. Надувание подушки 8 поднимает узел платформы на данном углу, а сдувание подушки 8 опускает узел платформы. Максимальная амплитуда расширения определяет максимальную амплитуду подъема, или ход, узла 1 платформы.
Подузел для угловой опоры 4 далее содержит кронштейн 13, который прикреплен к блоку 10, образуя, тем самым, жесткое и прямое механическое соединение между блоком 10 и углублением 14, сформированным в кронштейне 13. Как будет понятно из нижеследующего описания, углубление 14 сконфигурировано для приема поворотного прутка рычажного механизма, который несет платформу 3. То есть платформа 3 или ее структурная рама непосредственно опирается на узел угловой опоры, что создает промежуточное и прямое механическое соединение.
На фиг.5 и 6 приведен вид сбоку и простой вид в перспективе структурной рамы для поддержки платформы 3. Рама имеет две длинные стороны 15 или боковые балки, и две коротких стороны 16, или поперечные балки. Рама 15, 16 является жесткой конструкцией и поддерживает, по существу, плоскую пластину, образующую платформу 3. В положении покоя рама лежит на четырех угловых опорах 4, а ее поперечные балки 16 или их удлиняющие прутки посажены в соответствующие углубления 14 каждого из кронштейнов 13. Углубления 14 выполнены с, по существу, полукруглым основанием с входной рампой в форме желоба. Когда балки или прутки 16 опираются на кронштейны 13, они имеют возможность вращаться или поворачиваться внутри углублений 14. Соответственно противоположная узкая сторона рамы, таким образом, может подниматься, в то время как удлинительные прутки или балки 16 поддерживаются с возможностью поворота.
На фиг.5 показана левая сторона рамы в немного поднятом положении. Подъем в этом иллюстративном варианте осуществляется рычажным механизмом подъемника, который содержит первую тягу 17 и вторую тягу 17'. Эти две тяги 17, 17' расположены подобно угловому кронштейну, жестко прикрепленному к установленной с возможностью вращения цапфе или оси 18. Как схематически показано на чертеже, ось 18 образует фиксированный центр вращения шарнира, который неподвижен относительно нижнего короба 2. То есть ось остается неподвижной и жесткой относительно кронштейнов 13, которые установлены на блоках 10, которые, в свою очередь, опираются на надувные подушки 8. Тяга 17 шарнирно соединена с еще одной тягой 19, которая соединяет этот угловой кронштейн с толкающим/тянущим блоком 20. Когда блок 20 выталкивается влево на чертеже, тяга 19 вытягивает первую тягу 17 (т.е, нижний рычаг углового кронштейна) влево и, тем самым, заставляет вторую тягу 17' (т.е. верхний рычаг углового кронштейна) подняться вверх. То есть угловой кронштейн поворачивается по часовой стрелке. Свободный конец второй тяги 17' соединен с удлинительным прутком 16, который поднимает левую сторону рамы с ее опоры на кронштейне 13. Удлинительный пруток 16 описается на продолговатую опору в боковой части рамы 15 так, чтобы иметь заданную величину люфта. Люфт необходим из-за разной длины верхнего рычага кронштейна с одной стороны и длинными сторонами 15 рамы с другой стороны. Рычажный механизм подъемника, таким образом, преобразует горизонтальное движение блока 20 в, по существу, вертикальное движение опорной рамы и платформы 3.
Обратное движение платформы 3 в положение покоя является просто противоположным движению подъема. Здесь, однако, блок 20 толкается/вытягивается обратно вправо под действием силы тяжести, действующей на раму 15, 16 через платформу 3, и тренажер, установленный на ней. Положение возврата достигается, когда узкие стороны с их балками или стержнями 16 все обопрутся на соответствующие кронштейны 13. Следует понимать, что толкающий/вытягивающий блок 20 выполнен с возможностью свободного перемещения в продольном направлении.
Эквивалентный рычажный механизм подъемника установлен на противоположной стороне узла 1 платформы. То есть можно поднять правую сторону рамы и платформу 3 соответствующим способом, как и правую сторону. В реализации подъемного механизма в предпочтительном варианте можно поднимать только одну сторону за один раз. Это будет описано со ссылками на фиг.7.
На фиг.7 показана схема, иллюстрирующая подачу приводного момента на левый рычажный механизм и правый рычажный механизм. Двигатель 21 в форме ступенчатого или шагового электродвигателя приводит во вращение шпиндель или ходовой винт 22. Шаговый двигатель 21 является двигателем с точным управлением с точным управлением движения влево и вправо. Ходовой винт 22 на противоположной стороне установлен в подшипнике 23 вращения, который позволяет ходовому винту свободно вращаться. Ходовой винт 22 не находится в зацеплении с блоками 20, и блоки 20 могут свободно двигаться относительно ходового винта 22. Толкающий блок 24 расположен между блоками 20. Толкающий блок 24 имеет внутреннюю резьбу, обычно выполненную в форме вставной гайки, которая находится в зацеплении с ходовым винтом 22. То есть, когда двигатель 21 вращает ходовой винт 22, толкающий блок движется вправо или влево в зависимости от шага резьбы и направления вращения двигателя 21. В предпочтительном варианте шаг резьбы выбран так, чтобы движение толкающего блока 24 длиной один дюйм (25,4 мм) требовало приблизительно 10 полных оборотов ходового винта 22. Таким образом, здесь привод для подъема платформы основан на преобразовании вращательного движения (т.е. вращения двигателя/шпинделя) в линейное движение толкающего блока 24. Как указано выше, рычажные механизмы подъемника преобразуют горизонтальное движение толкающего блока в, по существу, вертикальное движение соответствующей стороны платформы 3.
Эта иллюстрация позволяет понять, что платформа является относительно прочной и жестко поддерживается вдоль ее продольного направления. То есть выборочное движение вверх и вниз за счет вращения двигателя 22 в положительном направлении вращения или в отрицательном направлении вращения передает на платформу положительное и определенное движение. В остальном платформа не имеет возможности свободного движения в направлении наклона вперед/назад.
В поперечном направлении этот эффект проявляется иначе. Платформа 1, как указано выше, опирается на четыре угловые ножки 3, которые образованы надувными подушками или камерами. Угловые ножки 4 являются настолько мягкими, что платформа 1 может наклоняться влево и вправо вокруг своей продольной оси 5. Благодаря тому, что наклон, придаваемый пользователем, находящимся на велотренажере, установленном на платформе, создает большие боковые силы, чем продольный наклон, платформа поддерживается довольно жестко в направлении вперед/назад.
На практике оказалось удобно, чтобы пользователь сначала поднялся на платформу, а затем сел на тренажер, пока надувные подушки 8 еще не надуты. Затем при тренировке с полной нагрузкой, создаваемой велотренажером и пользователем, подушки 8 опор 4 надуваются до заданного давления, после чего платформа поднимается (по выбору на высоту от одного до трех дюймов (25,4 - 76,2 мм)), при этом платформа 3 находится, по существу, в горизонтальной ориентации (т.е, все четыре опоры надуты с одинаковым давлением). Такое начальное надувание, следовательно, обеспечивает калибровку системы по весу пользователя и создает жесткую опору в направлении вперед/назад, и в то же время создает кажущуюся мягкой опору для поворотов влево/вправо. В контексте предпочтительного варианта узла платформы для поддержки велотренажера такой относительно мягкий и легкий наклон влево/вправо наряду с относительно жесткой опорой в направлении вперед/назад напоминает реальную езду на велосипеде или другом двухколесном транспортном средстве. Особенно в положении езды стоя пользователь может наклонять тренажер в обе стороны, что дает особенно реалистичные ощущения.
Описанный узел 1 платформы является универсально применимым узлом, который выполнен с возможностью поддерживать разнообразные тренажеры и тренажерное оборудование. Он также особенно подходит для модернизации существующих систем и тренажерных залов. Предположим, например, что тренажерный зал уже имеет 20 велотренажеров, которые стационарно установлены на полу. Теперь зал может закупить 20 узлов платформ и установить велотренажеры на платформы. Другие элементы и шаги для такой модернизации или создания полностью нового зала будут понятны из нижеследующего описания.
На фиг.8 приведен схематический вид сверху иллюстративного тренажерного зала для велотренажеров. Хотя показано только три тренажера, следует понимать, что может иметься любое количество тренажеров в зависимости от размера зала и количества участников. Каждая опорная платформа 1 имеет велотренажер 32, установленный неподвижно и обращенный вперед в продольном направлении платформы 3 и к видеоэкрану 34, расположенному перед велотренажерами 32. Каждый велотренажер 32 имеет маховик 33. Установленный на потолке проектор 25 проецирует изображения на экран 34. Экран 34 может быть изогнутым дисплеем или просто покрытой специальной краской стеной зала. Вместо показанной системы можно применять системы с проекцией сзади или активный дисплей, такой как занимающий всю стену комплект синхронизированных светодиодных дисплеев. Проектор 25, выводящий изображение, управляется контроллером 26. В предпочтительном варианте контроллер 26 является компьютером с необходимыми программами и интерфейсами.
В дополнение к контенту, выводимому на главный экран дисплея, которым может быть, например, видео поездки по дороге на природе, по горной дороге с подъемами и спусками и т.п., на экране также можно отображать параметры тренировки. В их число могут входить пройденное расстояние, средняя скорость, текущая скорость видео поездки, или даже текущая скорость индивидуальных участников, тренирующихся в данное время, сожженные калории, частота пульса индивидуальных участников тренировки и множество других.
Через акустическую систему, предпочтительно систему объемного звучания, можно воспроизводить соответствующую музыку, которая также может быть синхронизирована с содержанием видео. Синхронизированная система освещения может дополнять обстановку и дополнительно повышать уровень удовольствия во время тренировки.
Источник сжатого воздуха в форме компрессора 27 создает необходимое давление надувания для надувных подушек 8. Как показано на пневматической диаграмме на фиг.9, каждая ножка 4 индивидуально управляется трехходовым клапаном 28. Этими тремя положениями клапана являются "закрыт", "надуть" и "сдуть". Когда клапан находится в положении надувания, надувная подушка 8 надувается до давления, создаваемого компрессором 27. После надувания клапан может вернуться в закрытое положение. В положении сдувания надувная подушка 8 сдувается, выпуская воздух в атмосферу. На фиг.9 оба клапана находятся в положении сдувания. Необходимое давление для сдувания создается платформой и весом всего, что находится на платформе 3. При индивидуальном управлении четырьмя ножками 4 каждая платформа может принимать разные положения и совершать разные движения. Например, сдувание обеих передних ножек приводит к наклону платформы вперед. Велотренажер, установленный на платформе, следовательно, наклоняется вперед, как при езде под гору. При сдувании ножки на одной стороне велотренажер наклоняется в сторону, как при езде в повороте. Также возможны комбинации движений наклона вперед или назад и вбок.
В предпочтительном варианте каждая платформа содержит пост 29 управления, который поддерживает связь с контроллером 26 для приема соответствующих главных управляющих команд или наборов команд. Главные управляющие команды применяются для передачи управляющих команд на каждую управляемую систему платформы. К управляемым системам относятся по меньшей мере один клапан 28 для надувания/сдувания ножек 4 и для привода двигателя 21.
Дополнительно может иметься вибрационный двигатель 30 (см. фиг.8) в форме эксцентрикового вибрационного двигателя. Двигатель 309 может включаться, например, если на дисплее отображается движение по гравийной дороге или другой неровной местности. Кроме того, для получения еще более реалистичных ощущений, имеются нагнетательные вентиляторы 31. Вентиляторы 31 также могут приводиться в действие синхронно с дисплеем, например, ускоряя поток воздуха при движении под гору, и уменьшая скорость потока воздуха при движении в гору. Вентиляторы также могут быть синхронизированы со скоростью вращения педалей соответствующего участника, что позволяет каждому участнику определять количество набегающего на него воздуха.
Управляемые системы управляются синхронно с дисплеем. Для этого все управляемые системы, включая управляющие посты 29, находятся на связи с контроллером 26 для получения соответствующих наборов команд. Они могут быть подключены либо проводами, либо поддерживать связь по беспроводному протоколу. Система беспроводной сети с протоколом Интернет с пакетной связью является предпочтительной. Кроме того, подходят коммуникационные протоколы Bluetooth, поскольку дальность действия связи по Bluetooth особенно подходит для тренажерного зала и позволяет адаптировать до 7 тренажеров. Благодаря беспроводной связи между контроллером 26 и управляющими постами 29 можно любой из тренажеров отключить, не дожидаясь окончания тренировки, например, если пользователь хочет сделать перерыв, и включить его вновь, не теряя синхронизации. То есть, если тренажер включается во время уже идущей тренировки (или во время уже демонстрируемого видеофильма), он немедленно синхронизируется с текущим положением на дисплее.
Новая система также выполнена с возможностью сочетать движение платформы с установленным на ней велотренажером вверх/вниз, которое напоминает движение в гору или под гору, с сопротивлением на маховике велотренажера 32. Это может быть выполнено либо чисто механическим механизмом, пневматическим приводом или даже с помощью еще одного беспроводного устройства.
Промышленная применимость вышеописанного изобретения вполне очевидна.
Перечень позиций
1 - узел платформы
2 - нижний короб
3 - платформа
4 - угловая опора
5 - крепежный кронштейн
6 - ручка
7 - ролик, поворотный ролик
8 - надувная подушка
9 - нескользящая резиновая опора
10 - блок
11 - штуцер
12 - стрелка (расширение подушки)
13 - кронштейн
14 - углубление
15 - рама (длинная балка)
16 - рама (поперечная балка)
17, 17' - тяга
18 - поворотная ось
19 - тяга
20 - толкающий/тянущий блок
21 - двигатель
22 - ходовой винт
23 - подшипник вращения
24 - толкающий блок
25 - мультимедийный проектор
26 - контроллер
27 - источник сжатого воздуха
28 - трехходовой клапан
29 - управляющий пост
30 - вибрационный двигатель
31 - нагнетательный вентилятор
32 - велотренажер
33 - маховик
34 - экран дисплея

Изобретение относится к тренажерному оборудованию и интерфейсам виртуальная реальность – человек и направлено на повышение адаптивности к существующим системам. Узел платформы для поддержки тренажерного оборудования содержит нижний короб, платформу, механизм подъемника и контроллер. Нижний короб содержит четыре регулируемые по высоте угловые опоры для поддержки узла платформы на поверхности пола. Платформа установлена на нижний короб и несет крепежные устройства для жесткого крепления тренажерного оборудования на эту платформу. Платформа определяет продольное направление, по существу, вдоль своей центральной линии, и поперечное направление, перпендикулярное ей. Механизм подъемника расположен в нижнем коробе и выполнен с возможностью выборочного подъема передней части платформы относительно нижнего короба для наклонения платформы в переднем направлении или для подъема задней части платформы относительно нижнего короба для опускания платформы в переднем направлении. Контроллер поддерживает связь с четырьмя регулируемыми по высоте угловыми опорами и с механизмом подъемника. Контроллер выполнен с возможностью удаленно приводить в действие механизм подъемника для выборочного наклона или опускания платформы и удаленно приводить в действие каждую из угловых опор для выборочного подъема или опускания нижнего короба в соответствующем его углу. 2 н. и 6 з.п. ф-лы, 9 ил.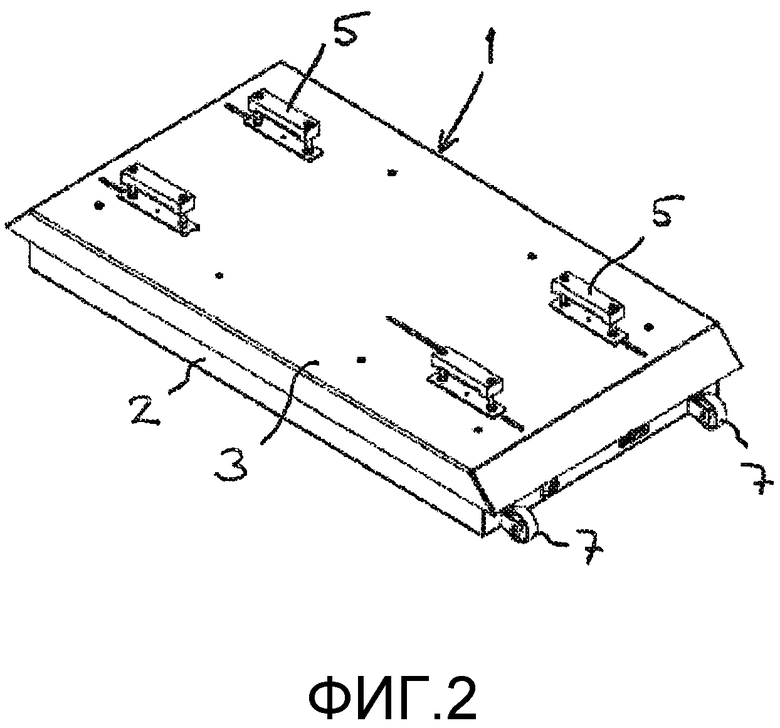
1. Узел платформы для поддержки тренажерного оборудования, содержащий:
нижний короб с четырьмя регулируемыми по высоте угловыми опорами для поддержки узла платформы на, по существу, ровной поверхности пола;
платформу, установленную на нижний короб и несущую крепежные устройства для жесткого крепления тренажерного оборудования на эту платформу, при этом платформа определяет продольное направление, по существу, вдоль своей центральной линии и поперечное направление, перпендикулярное ей;
механизм подъемника, расположенный в нижнем коробе и выполненный с возможностью выборочного подъема передней части платформы относительно нижнего короба для наклонения платформы в переднем направлении или для подъема задней части платформы относительно нижнего короба для опускания платформы в переднем направлении;
контроллер, поддерживающий связь с четырьмя регулируемыми по высоте угловыми опорами и с механизмом подъемника, при этом контроллер выполнен с возможностью удаленно приводить в действие механизм подъемника для выборочного наклона или опускания платформы и удаленно приводить в действие каждую из угловых опор для выборочного подъема или опускания нижнего короба в соответствующем его углу.
2. Узел платформы по п. 1, в котором каждая из угловых опор содержит несущий блок, жестко установленный на нижнем коробе, надувную подушку, установленную в несущем блоке, и штуцер для соединения по текучей среде надувной подушки с источником сжатого воздуха для надувания надувной подушки и, тем самым, подъема несущего блока и нижнего короба относительно поверхности пола.
3. Узел платформы по п. 1, в котором каждая из угловых опор содержит несущий блок, жестко установленный на нижнем коробе, и кронштейн, жестко соединенный с несущим блоком, при этом платформа имеет жесткую раму, которая в положении покоя лежит на всех четырех несущих блоках и, когда платформа наклонена, лежит на двух несущих блоках двух задних угловых опор, а когда платформа опущена, лежит на двух несущих блоках двух передних угловых опор.
4. Узел платформы по п. 1, в котором механизм подъемника содержит:
рычажный механизм с первой и второй тягами на переднем конце платформы и с первой и второй тягами на заднем конце платформы, при этом рычажный механизм установлен на поворотной оси так, что первая и вторая тяги охватывают угол приблизительно 90° при виде сбоку, при этом поворотная ось установлена с возможностью вращения на нижнем коробе, а свободный конец второй тяги соединен с платформой, при этом, по существу, горизонтальное движение свободного конца первой тяги преобразуется в, по существу, вертикальное движение свободного конца второй тяги для подъема платформы на переднем конце или на заднем конце;
двигатель и ходовой винт, приводимый во вращение двигателем для выборочного вращения влево или вправо, при этом ходовой винт проходит, по существу, вдоль продольного направления;
блок толкателя, расположенный для зацепления с ходовым винтом и для перемещения вдоль ходового винта, когда ходовой винт вращается; и
толкающий/вытягивающий блок, расположенный на передней стороне толкающего блока, и толкающий/вытягивающий блок, расположенный на задней стороне толкающего блока, при этом каждый толкающий/вытягивающий блок соединен для перемещения свободного конца соответственно соединенной первой тяги при толкании толкающим блоком для подъема тем самым либо переднего конца платформы, либо заднего конца платформы.
5. Узел платформы по п. 1, в котором угловые опоры содержат надувные подушки, которые при надувании поднимают соответствующий угол нижнего короба на заданное расстояние от поверхности пола, причем при надутых надувных подушках нижний короб поднят над поверхностью пола и поддерживается, по существу, горизонтально и амортизируется надувными подушками, при этом источник сжатого воздуха для надувания подушек соединен по текучей среде с каждой из надувных подушек, а механизм подъемника выполнен с возможностью наклонять или опускать платформу независимо от надувания или сдувания надувных подушек.
6. Узел платформы по п. 1, выполненный с возможностью модернизации, выполняемой путем снятия велотренажера с напольного крепления и установки велотренажера на крепежное устройство на платформе.
7. Тренажерный зал, содержащий:
экран дисплея и видеосистему для отображения движущихся изображений на этом экране дисплея;
множество узлов платформ по п. 1, обращенных к экрану дисплея, и велотренажеры, установленные на каждом из этих узлов платформ;
контроллер, соединенный с видеосистемой и с каждым из узлов платформ, при этом контроллер управляет выборочным надуванием и сдуванием надувных подушек и выборочным подъемом и опусканием платформ механизмом подъемника синхронно с контентом движущихся изображений, отображаемых на экране дисплея.
8. Тренажерный зал по п. 7, в котором контроллер выполнен с возможностью синхронизации множества вспомогательных устройств с контентом движущихся изображений, при этом вспомогательные устройства выбраны из группы, содержащей один или более нагнетательных вентиляторов, направленных на платформы, индивидуальные пневматические клапаны для надувания и сдувания надувных подушек, вибрационный двигатель, расположенный на каждой из платформ, и устройство для задания сопротивления на маховике каждого из велотренажеров на платформах.
| US 20120071300 A1, 22.03.2012 | |||
| KR 20110116395 A, 26.10.2011 | |||
| US 20050164843 A1, 28.07.2005 | |||
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВЕЛОСИПЕДИСТОВ | 2000 |
|
RU2181610C2 |

