Изобретение относится к устройствам для сварки металлов, а именно к переносным сварочным роботам [B23K11/00, B23K 11/28, B23K 37/02, B25J 19/00].
Из уровня техники известен СВАРОЧНЫЙ РОБОТ С МАГНИТНЫМ ПРИВОДОМ [CN107414254A, опубликовано: 01.12.2017], который содержит основание, ведущее колесо, устройство измерения положения, рулевое устройство, устройство управления, электромагнит, сварочную систему, регулятор магнитной силы, трекер сварки, механизм сварочной горелки, сварочное саморегулирующееся устройство, манипулятор, подъемник и поворотную платформу, ведущее колесо установлено на нижней стороне основания, внутри основания последовательно расположены регулятор магнитной силы, устройство измерения положения, электромагнит и рулевое устройство, при этом регулятор магнитной силы и электромагнит расположены внизу основания, подъемная гусеница установлена на верхней стороне поворотной платформы, а поворотная платформа установлена в центре верхней стороны основания, манипулятор смонтирован на подъемнике, на конце манипулятора смонтирован механизм сварочной горелки, который соединен со сварочной системой, сварочное саморегулирующееся устройство установлено на верхней стороне механизма сварочной горелки, а сварочный трекер установлен на нижней стороне механизма сварочной горелки, рулевое устройство включает в себя ресивер, рулевой механизм, рулевой вал, интегральный рулевой механизм, колесо и шатун, рулевой вал установлен на верхней стороне рулевого колеса, а шатун установлен по обе стороны руля, колесо установлено на конце шатуна, рулевой механизм установлен на верхнем конце рулевого вала, а ресивер установлен на верхней стороне рулевого механизма, устройство управления содержит корпус, экран дисплея, систему управления движением робота, клавиатуру ввода, систему управления сваркой и монтажную плату, причем монтажная плата и система управления сваркой смонтированы внутри корпуса, экран дисплея и клавиатура ввода установлены снаружи корпуса, экран дисплея и клавиатура ввода соединены с печатной платой, устройство измерения положения, рулевое устройство, регулятор магнитной силы, манипулятор робота, поворотная платформа и сварочный трекер подключены к системе управления движением робота, сварочная система, сварочное саморегулирующееся устройство, сварочный трекер соединены с системой управления сваркой, при этом устройство
измерения положения выполнено в виде фотоэлектрического прибора для измерения расстояния, а трекер сварки оснащен устройством визуального распознавания позиционирования шва.
Недостатком аналога является его низкая надежность, обусловленная сложностью конструкции и требует высококвалифицированного персонала для его работы.
Наиболее близким по технической сущности является СВАРОЧНЫЙ РОБОТ НА МАГНИТНОЙ ПОДУШКЕ [CN115415696A, опубликовано: 02.12.2022], в котором функциональная часть на магнитной подушке включает магнитомягкую стальную пластину, скользящую стальную пластину, чугунные втулки и анкерные стержни, магнитомягкая стальная пластина и скользящая стальная пластина смонтированы вертикально и соединены друг с другом, анкерные стержни приварены вертикально на магнитомягкой стальной пластине, чугунные втулки приварены вертикально на скользящей стальной пластине, конструктивная часть сварочного робота включает систему рабочей платформы, систему позиционирования и систему сварки, магнитомягкая стальная пластина и скользящая стальная пластина в функциональных частях магнитной подушки размещены на одной стороне рабочей поверхности системы рабочей платформы, а система позиционирования вертикально стыкуется с магнитомягкой стальной пластиной и скользящей стальной пластиной, чугунные втулки и анкерные стержни временно располагаются в положениях установки на скользящей стальной пластине и магнитомягкой стальной пластине, сварочная система подвижно расположена на направляющей с другой стороны системы рабочей платформы, сварочная система включает в себя универсальную сварочную головку и основной корпус сварочной машины, причем между универсальной сварочной головкой и основным корпусом сварочной машины предусмотрены подвижные соединения для вращения универсальной сварочной головки на 360°, а в нижней части основного корпуса сварочного аппарата предусмотрены ходовые колеса для перемещения всей сварочной системы на направляющей, на переднем конце универсальной сварочной головки предусмотрен лазерный дальномер для маркировки расстояния, на основном корпусе сварочного аппарата предусмотрен USB-интерфейс для ввода сварочных данных и сварочных программ.
Основной технической проблемой прототипа является его значительные габаритные показатели, невозможность автономного использования сварочного робота на различных участках сварных работ, в том числе труднодоступных, так как его конструкция предусматривает его размещение на отдельно оборудованной линии для сварки длинномерных деталей.
Задача изобретения состоит в устранении недостатков аналога и прототипа.
Технический результат изобретения заключается в создании мобильного и надежного коллаборативного сварочного аппарата на магнитной подушке с повышенной функциональностью.
Указанный технический результат достигается за счет того, что коллаборативное сварочное устройство, содержащее аппарат для сварки в защитных газах, манипулятор со сварочной горелкой, баллон с защитным газом и блок управления сварочным аппаратом, размещенные на платформе, которая выполнена с возможностью перемещения в горизонтальной и вертикальной плоскостях, отличающееся тем, что манипулятор со сварочной горелкой смонтирован на магнитной подушке с возможностью его перемещения вместе с магнитной подушкой с платформы в зону сварки и закрепления посредством упомянутой магнитной подушки на ферромагнитной поверхности стола или свариваемой детали, при этом магнитная подушка соединена с основанием манипулятора шарнирно с возможностью регулировки угла наклона основания магнитной подушки относительно манипулятора.
Указанный технический результат достигается за счет того, что коллаборативное сварочное устройство, содержащее аппарат для сварки в защитных газах, манипулятор со сварочной горелкой, баллон с защитным газом и блок управления сварочным аппаратом, размещенные на платформе, которая выполнена с возможностью перемещения в горизонтальной и вертикальной плоскостях, отличающееся тем, что манипулятор со сварочной горелкой смонтирован на магнитной подушке с возможностью его перемещения вместе с магнитной подушкой с платформы в зону сварки и закрепления посредством упомянутой магнитной подушки на ферромагнитной поверхности стола или свариваемой детали, при этом магнитная подушка выполнена секционной, причем каждая секция выполнена в виде отдельного корпуса с магнитом внутри.
В частности, магнит магнитной подушки выполнен в виде постоянного магнита.
В частности, магнит магнитной подушки выполнен в виде электромагнита.
В частности, секции магнитной подушки соединены с основанием манипулятора общим шарниром с возможностью регулировки угла наклона магнитной подушки относительно основания манипулятора.
В частности, секции магнитной подушки соединены с основанием манипулятора независимыми шарнирами с возможностью независимой регулировки угла наклона каждой из секций магнитной подушки относительно основания манипулятора.
В частности, устройство выполнено с возможностью полуавтоматической сварки с холодным переносом металла.
В частности, манипулятор выполнен по меньшей мере c пятью степенями свободы.
В частности, манипулятор снабжен модулем технического зрения.
В частности, платформа снабжена колесными опорами для обеспечения ее перемещения в горизонтальной плоскости.
В частности, на дне платформы смонтирован подъемник для обеспечения ее перемещения в вертикальной плоскости.
В частности, стол выполнен или сборно-разборным.
В частности, колеса платформы снабжены приводными механизмами.
Краткое описание чертежей.
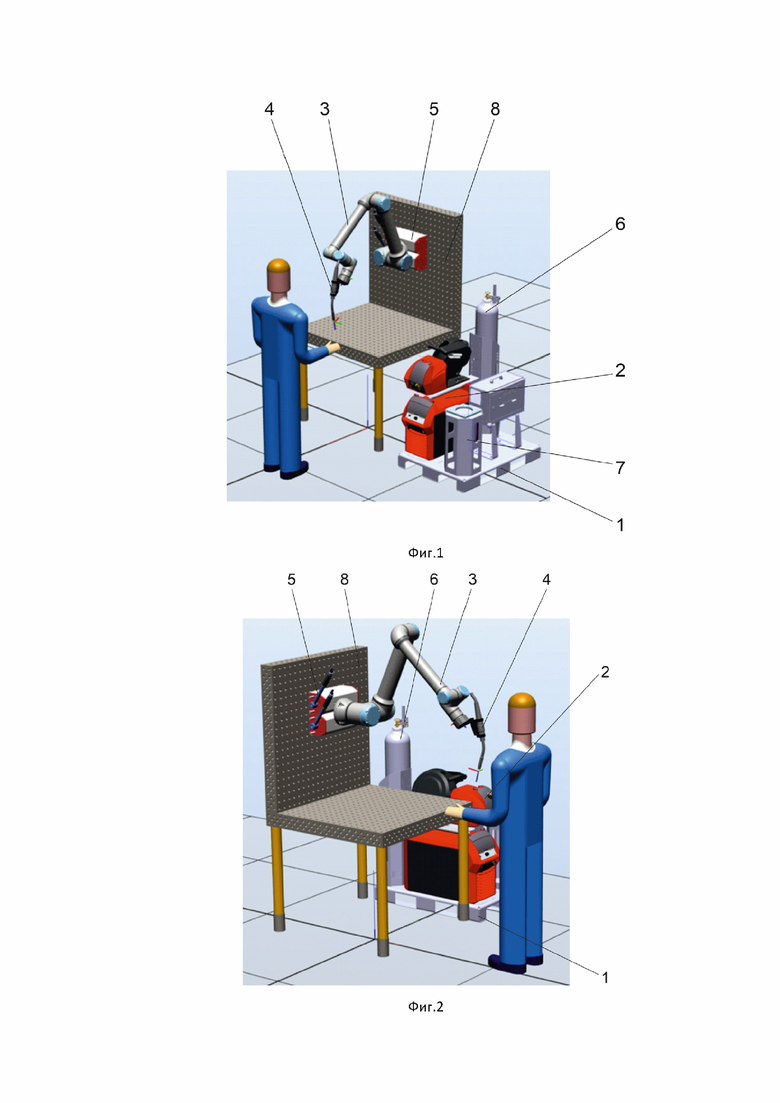
На фиг.1-2 показан общий вид коллаборативного сварочного устройства на магнитной подушке.
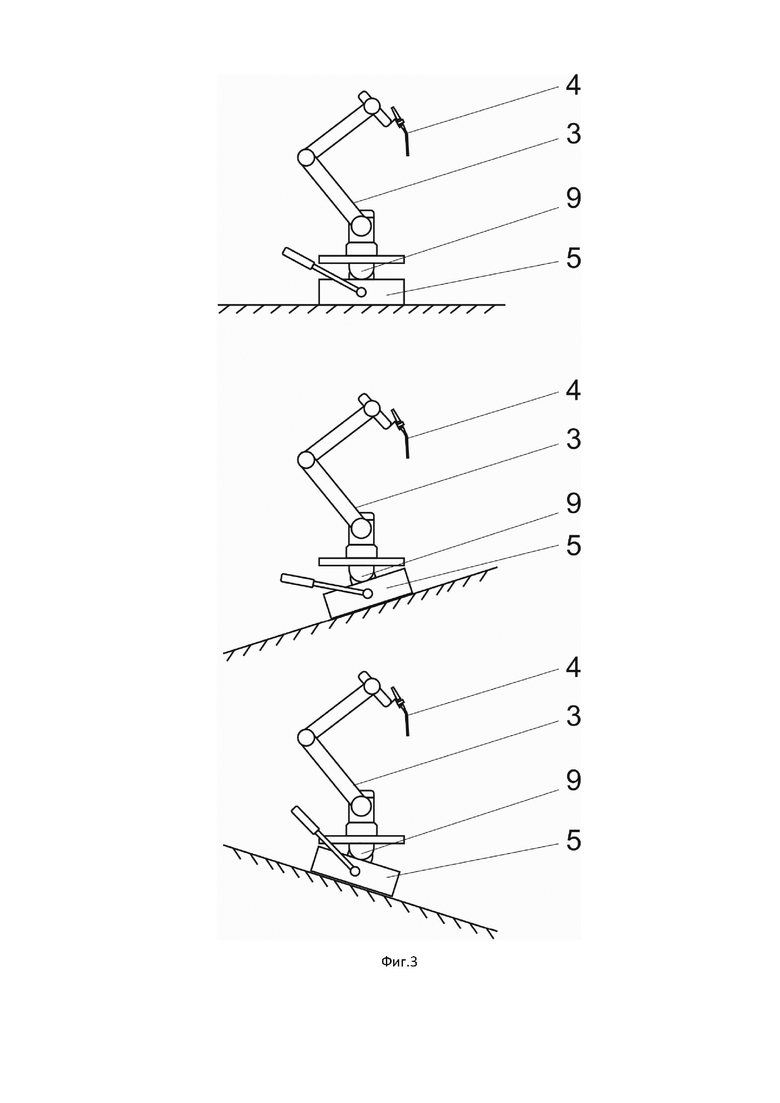
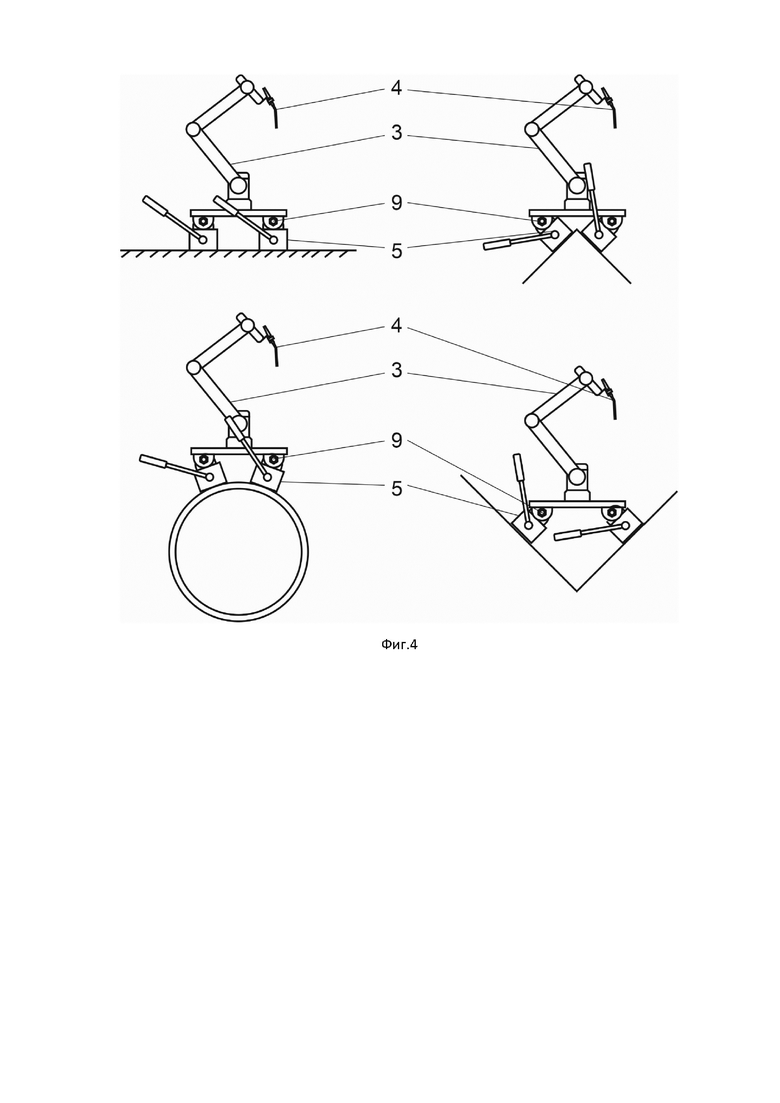
На фиг.3-4 показаны варианты расположения манипулятора на магнитной подушке.
На фигурах обозначено: 1 - платформа, 2 – сварочный аппарат, 3 – манипулятор, 4 – горелка, 5 – магнитная подушка, 6 – баллон с инертным газом, 7 – подставка, 8 – стол, 9 – шарнир.
Осуществление изобретения.
Изобретение представляет собой мобильный коллаборативный сварочный аппарат, снабженный магнитной подушкой для крепления его функциональной части к металлическим поверхностям. Коллаборативный сварочный аппарат содержит платформу 1, сварочный аппарат 2, манипулятор 3, горелку 4, магнитную подушку 5 (см.Фиг.1, 2).
Сварочный аппарат 2 выполнен полуавтоматическим с возможностью полуавтоматической сварки в среде защитных газов, например, холодным переносом металлов (СМТ).
Сварочный аппарат 2 смонтирован на платформе 1. К сварочному аппарату 2 шлангом подключен баллон с инертным газом 6, также смонтированный на платформе 1.
Сварочный аппарат 2 снабжен модулем управления (на фигурах не показан), смонтированным на передней его панели.
На платформе 1 смонтирована подставка 7 для размещения на ней манипулятора 3.
Платформа 1 может быть выполнена подвижной, подъемной, переносной и т.д.
Для обеспечения подвижности в горизонтальной плоскости платформа 1 может быть снабжена колесными или роликовыми опорами (на фигурах не показаны). Для обеспечения подвижности в вертикальной плоскости на дне платформы 1 снизу может быть смонтирован подъемник (на фигурах не показан), который выполнен с возможностью подъема платформы 1 на необходимую высоту. Упомянутый подъемник может быть выполнен механическим, электрическим, гидравлическим, пневматическим и т.д.
Управление перемещением платформой 1 вдоль может осуществлять как вручную, приложением к ней внешней силы, так и с помощью приводных механизмов, смонтированных к колесным (роликовым) опорам, к паре или ко всем. Управление приводными механизмами может быть выполнено, в том числе с блока управления коллаборативным сварочным аппаратом. Управление перемещением платформой 1 по высоте может быть также осуществляться вручную, когда привод выполнен механическим, или органами управления электрическим, гидравлическим, пневматическим и т.д. подъемником.
В одном из вариантов реализации коллаборативный сварочный аппарат может быть снабжен складным или сборно-разборным столом 8 или верстаком с возможностью его развертывания на любой горизонтальной, достаточной по габаритам, в том числе для размещения оператора, площадке вблизи платформы 1 и выполнения сварочных работ. Упомянутый стол 8 в сложенном положении может размещаться на платформе 1 или внутри нее, при наличии в ней отсеков (ниш).
На платформе 1 может быть расположен дополнительный инвентарь и оборудование, например, ящики для инструментов, заготовок, ЗИП и т.д.
Горелка 4 подключена к сварочному автомату 2 с помощью шланг-пакета и смонтирована на головке манипулятора 3, например, с помощью захвата (на фигуре не показан).
Функциональная часть коллаборативного сварочного аппарата содержит манипулятор 3, выполненного в виде механической руки из шарнирно соединенных между собой элементов. Шарнирные соединения элементов механической руки снабжены сервоприводами. Манипулятор 3 выполнен, как минимум, c пятью степенями свободы.
Захват, удерживающий горелку 4 выполнен механическим. На захвате или на головке манипулятора 3 может быть смонтирован, один или несколько модулей технического зрения, выполненные, например, в виде сенсорных датчиков или цифровой камеры.
Управление манипулятором 3 осуществляется с помощью контроллера, к которому подключен пульт программирования.
Пульт программирования манипулятора 3 и модуль управления сварочного аппарата 2 могут быть подключены к единому блоку управления с возможностью дистанционного управления коллаборативным сварочным аппаратом.
Манипулятор 3 своим основанием смонтирован на магнитной подушке 5, представляющей собой корпус, на верхней поверхности которой смонтирован упомянутый манипулятор 3, а внутри корпуса магнитной подушки смонтирован магнит, выполненный с возможностью взаимодействия с металлическими предметами (поверхностями) из ферромагнитных материалов при размещении магнитной подушки 5 на упомянутых металлических предметах (поверхностях) и активации магнита. Манипулятор 3 на корпусе магнитной подушки смонтирован, преимущественно, быстросъемным, разъемным, например, болтовым соединением.
Магнит выполнен, например, в виде постоянного магнита (ниодимовый, ферритовый) или электромагнита. Магнит может быть выполнен в виде сборки или нескольких независимых магнитов, смонтированных, например по периметру и/или по центру корпуса магнитной подушки 5.
Основание манипулятора 3 на магнитной подушке 5 может быть смонтировано шарнирно с возможностью обеспечения наклона манипулятора 3 относительно магнитной подушки 5 (см.Фиг.3). Шарнир 9 выполнен с возможностью угловой фиксации своего положения, например с помощью зубчатого или шипопазового механизма. Кроме того, шарнир 9 может быть снабжен сервоприводом, управление поворотом которого осуществляется с блока управления коллаборативным сварочным аппаратом или пульта программирования манипулятора 3.
В качестве варианта реализации может быть использована магнитная подушка 5, состоящая из нескольких секций, каждая из которых представляет собой отдельный корпус внутри которого смонтирован магнит (см.Фиг.4). Аналогом может выступать в этом варианте магнитный грузозахват. В таком случае, в варианте реализации шарнирного монтажа манипулятора 3 к магнитной подушке 5 каждая из отдельных секций магнитной подушки 5 снабжена независимым шарниром 9 с возможностью их независимой регулировки относительно основания манипулятора 3.
В варианте реализации магнита постоянным, он выполнен с возможностью вертикального перемещения или поворота внутри корпуса с помощью рычага.
В варианте реализации магнита в виде электромагнита он также смонтирован в нижней точке корпуса, а управление им и соответственно притягивание к металлической поверхности и расцепление с ней осуществляется подачей или прекращение подачи на катушку электромагнита электрического тока, в том числе с блока управления коллаборативного сварочного аппарата.
Для размещения и использования манипулятора 3 на подставке 7, поверхностью подставки 7 выполнена из ферромагнитного материала, с возможностью зацепления с ней магнита магнитной подушки 5.
Сварочный аппарат 1 может быть снабжен узлом обслуживания горелок (на фигурах не показан). Упомянутый узел представляет собой узел для поддержки процесса.
В состав узла входят узел для очистки сопла, узел для калибровки центральной точки инструмента, узел для впрыскивания антинагарного состава.
Преимуществами применения узла обслуживания горелок являются увеличение времени работы комплекса и повышение производительности, повышение качества сварки.
Коллаборативный сварочный аппарат на магнитной подушке могут использовать в следующих вариантах:
при размещении манипулятора 3 магнитной подушкой 5 на подставке 7 на платформе 1 и выполнении сварочных работ в непосредственной близости с платформой в зоне доступа манипулятора 3;
со столом 8 при размещении манипулятора 3 магнитной подушкой 5 на подставке 7 на платформе 1 рядом со столом при условии размещения стола 8 в зоне доступа манипулятора 3;
со столом 8 при размещении манипулятора 3 магнитной подушкой 5 непосредственно на столе 8;
при размещении манипулятора 3 магнитной подушкой 5 на поверхности из ферромагнитных материалов (вертикальные, горизонтальные поверхности, трубы, профильные конструкции и т.д.).
Оператор перед началом работ устанавливает платформу 1 коллаборативного сварочного аппарата вблизи места проведения работ, для чего используя колесные (роликовые) опоры регулирует расположение платформы 1 на местности, а с помощью подъемника регулирует расположение платформы 1 по высоте.
В зависимости от условий проведения работ оператор использует манипулятор 3 непосредственно с подставки 7, или разворачивает стол 8 и размещает манипулятор 3 магнитной подушкой 5 на столе 8, или размещает манипулятор 3 на любой металлической из ферромагнитных материалов, в том числе свариваемой конструкции, поверхности (см.Фиг.3,4). Для размещения манипулятора 3 магнитной подушкой 5 на столе 8 или любой другой поверхности из ферромагнитных материалов оператор деактивирует магнит магнитной подушки 5 (перемещением магнита в варианте реализации его постоянным или отключением питания в варианте реализации магнита в виде электромагнита), переносит манипулятор 3 вместе с магнитной подушкой 5 к месту его размещения, размещает манипулятор 3 магнитной подушкой 5 на поверхности и удерживая активирует магнит. Манипулятор 3 магнитной подушкой 5 размещен вблизи проведения сварочных работ. Для перемещения манипулятора 3 к новому месту или в исходное на платформу 1 положение оператор повторяет манипуляции.
Далее оператор выбирает с помощью блока управления программу для сварки в зависимости от характеристик свариваемых металлов. При необходимости оператор с помощью модуля управления сварочного аппарата 1 корректирует режимы работы сварочного аппарата 1.
Далее, оператор запускает коллаборативный сварочный аппарат. Манипулятор 3 с помощью модуля технического зрения, смонтированного на его захвате или головке, определяет положение свариваемых деталей и место их соединения между собой и осуществляет их соединение путем сварки с помощью сварочного аппарата 1. В качестве варианта реализации манипулятора 3 без технического зрения, оператор до запуска сварочного аппарата 1 вручную или пульта программирования за счет шарнирных соединений элементов манипулятора 3 подносит горелку 4, смонтированную на головке манипулятора 3 к месту соединения деталей, записывает базовые точки траектории и создает управляющую программу на пульте робота.
После завершения программы сварочный аппарат 1 отключается, манипулятор 3 возвращается в исходное положение.
Мобильность коллаборативного сварочного аппарата на магнитной подушке обеспечивается,
во-первых, размещением сварочного аппарата на подвижной платформе 1, позволяющей установить сварочный аппарат в непосредственной близости от проведения сварочных работ как в горизонтальной, так и в вертикальной плоскостях,
во-вторых, размещением манипулятора 3 на магнитной подушке 5, что позволяет размещать манипулятор 3 магнитной подушкой 5 на любых, выполненных из ферромагнитных материалов, поверхностях, в том числе и свариваемых конструкциях, в том числе труднодоступных и/или опасных для человека местах (на высоте, в резервуарах, внутри труб и т.д.);
в-третьих, шарнирным размещением манипулятора 3 на магнитной подушке 5, что позволяет регулировать угол наклона магнитной подушки 5, а при выполнении магнитной подушки 5 состоящей из нескольких отдельных секций, каждая из которых смонтирована на независимом шарнире 9, в том числе позволяет разместить манипулятор 3 на неровных поверхностях (дугообразных, угловых и т.д.).
Упомянутые конструктивные особенности, в том числе обеспечивают повышение функциональности коллаборативного сварочного аппарата.
Надежность коллаборативного сварочного аппарата обеспечивается простотой его конструкции, включающей минимально необходимые для выполнения работ составные части и одновременно с этим простотой конструкции магнитной подушки 5. Конструкция коллаборативного сварочного аппарата за счет ее упрощения путем оснащения минимально необходимыми платформой 1, сварочным аппаратом 2, с подключенным к нему баллоном с инертным газом 6, манипулятором 3 с горелкой 4 магнитной подушкой 5 обеспечивает надежность и снижает время простоя при ремонте.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЛАБОРАТИВНЫЙ СВАРОЧНЫЙ АППАРАТ | 2022 |
|
RU2789145C1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ДЛЯ СБОРКИ И СВАРКИ КУЗОВОВ АВТОМОБИЛЕЙ | 1995 |
|
RU2102210C1 |
| КОЛЛАБОРАТИВНАЯ СБОРОЧНО-ПРОИЗВОДСТВЕННАЯ ЛИНИЯ | 2020 |
|
RU2771901C2 |
| КОЛЛАБОРАТИВНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ПЕРЕМЕЩЕНИЯ ПРОДУКЦИИ ПОДВЕСНОГО РАЗМЕЩЕНИЯ | 2024 |
|
RU2841086C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СБОРКИ И КОЛЬЦЕВОЙ СВАРКИ ТРУБЧАТЫХ ИЗДЕЛИЙ | 2024 |
|
RU2840538C1 |
| УЧАСТОК ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ СВАРНЫХ ИЗДЕЛИЙ | 2008 |
|
RU2378097C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ СВАРКИ ПОДСБОРОК КУЗОВА АВТОМОБИЛЯ | 2002 |
|
RU2221683C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ СВАРКИ ЛИСТОШТАМПОВОЧНЫХ ЭЛЕМЕНТОВ КУЗОВА АВТОМОБИЛЯ | 1999 |
|
RU2164201C2 |
| Устройство для образования флюсовой подушки при сварке кольцевых швов | 1981 |
|
SU958055A1 |
| КОЛЛАБОРАТИВНЫЙ РОБОТИЗИРОВАННЫЙ УЧАСТОК ПЕРЕСЧЕТА ДЕНЕЖНОЙ НАЛИЧНОСТИ | 2018 |
|
RU2697316C1 |
Изобретение относится к устройствам для сварки металлов, а именно к переносным сварочным роботам. Коллаборативное сварочное устройство содержит аппарат для сварки в защитных газах, манипулятор со сварочной горелкой, баллон с защитным газом и блок управления сварочным аппаратом, размещенные на платформе, которая выполнена с возможностью перемещения в горизонтальной и вертикальной плоскостях. Манипулятор со сварочной горелкой смонтирован на магнитной подушке с возможностью его перемещения вместе с магнитной подушкой с платформы в зону сварки и закрепления посредством упомянутой магнитной подушки на ферромагнитной поверхности стола или свариваемой детали. Магнитная подушка может быть соединена с основанием манипулятора шарнирно с возможностью регулировки угла наклона основания магнитной подушки относительно манипулятора. Магнитная подушка может быть секционной, причем каждая секция выполнена в виде отдельного корпуса с магнитом внутри. Изобретение обеспечивает возможность автономного использования сварочного робота на труднодоступных участках сварочных работ. 2 н. и 10 з.п. ф-лы, 4 ил.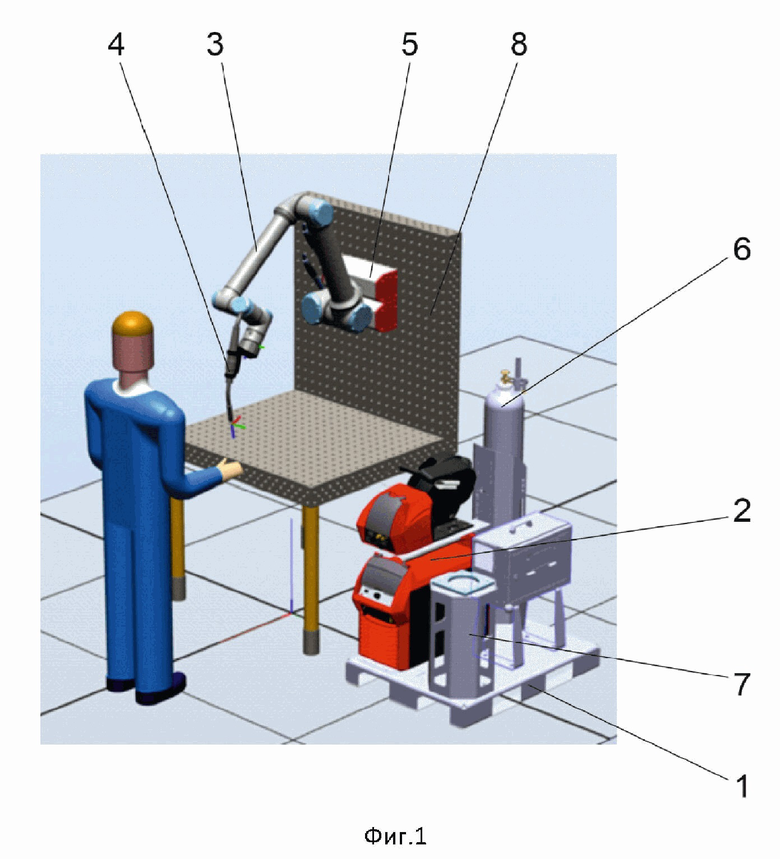
1. Коллаборативное сварочное устройство, содержащее аппарат для сварки в защитных газах, манипулятор со сварочной горелкой, баллон с защитным газом и блок управления сварочным аппаратом, размещенные на платформе, которая выполнена с возможностью перемещения в горизонтальной и вертикальной плоскостях, отличающееся тем, что манипулятор со сварочной горелкой смонтирован на магнитной подушке с возможностью его перемещения вместе с магнитной подушкой с платформы в зону сварки и закрепления посредством упомянутой магнитной подушки на ферромагнитной поверхности стола или свариваемой детали, при этом магнитная подушка соединена с основанием манипулятора шарнирно с возможностью регулировки угла наклона основания магнитной подушки относительно манипулятора.
2. Коллаборативное сварочное устройство, содержащее аппарат для сварки в защитных газах, манипулятор со сварочной горелкой, баллон с защитным газом и блок управления сварочным аппаратом, размещенные на платформе, которая выполнена с возможностью перемещения в горизонтальной и вертикальной плоскостях, отличающееся тем, что манипулятор со сварочной горелкой смонтирован на магнитной подушке с возможностью его перемещения вместе с магнитной подушкой с платформы в зону сварки и закрепления посредством упомянутой магнитной подушки на ферромагнитной поверхности стола или свариваемой детали, при этом магнитная подушка выполнена секционной, причем каждая секция выполнена в виде отдельного корпуса с магнитом внутри.
3. Устройство по п.1 или 2, отличающееся тем, что магнит магнитной подушки выполнен в виде постоянного магнита.
4. Устройство по п.1 или 2, отличающееся тем, что магнит магнитной подушки выполнен в виде электромагнита.
5. Устройство по п.2, отличающееся тем, что секции магнитной подушки соединены с основанием манипулятора общим шарниром с возможностью регулировки угла наклона магнитной подушки относительно основания манипулятора.
6. Устройство по п.2, отличающееся тем, что секции магнитной подушки соединены с основанием манипулятора независимыми шарнирами с возможностью независимой регулировки угла наклона каждой из секций магнитной подушки относительно основания манипулятора.
7. Устройство по п.1 или 2, отличающееся тем, что оно выполнено с возможностью полуавтоматической сварки с холодным переносом металла.
8. Устройство по п.1 или 2, отличающееся тем, что манипулятор выполнен по меньшей мере c пятью степенями свободы.
9. Устройство по п.1 или 2, отличающееся тем, что манипулятор снабжен модулем технического зрения.
10. Устройство по п.1 или 2, отличающееся тем, что платформа снабжена колесными опорами для обеспечения ее перемещения в горизонтальной плоскости.
11. Устройство по п.1 или 2, отличающееся тем, что на дне платформы смонтирован подъемник для обеспечения ее перемещения в вертикальной плоскости.
12. Устройство по п.1 или 2, отличающееся тем, что стол выполнен сборно-разборным.
13. Устройство по п.1 или 2, отличающееся тем, что колеса платформы снабжены приводными механизмами.
| КОЛЛАБОРАТИВНЫЙ СВАРОЧНЫЙ АППАРАТ | 2022 |
|
RU2789145C1 |
| СПОСОБ ПОЛУЧЕНИЯ БИЦИКЛИЧЕСКОГО СОЕДИНЕНИЯ | 0 |
|
SU212160A1 |
| Установка для автоматической сварки | 1989 |
|
SU1676779A1 |
| CN 106141527 B, 11.05.2018 | |||
| CN 115415696 A, 02.12.2022. | |||

