Область техники, к которой относится изобретение
Настоящее раскрытие, в общем, относится к обработке изображений, и, более конкретно, к способу и устройству выделения характеристики.
Уровень техники
Обнаружение и распознавание изображения представляет собой важное поле для исследования в области компьютерного видения. Наиболее распространенный способ в технологии для обнаружения и распознавания изображения состоит в выделении некоторого свойства изображения для обнаружения и распознавания изображения.
В предшествующем уровне техники изображение обнаруживают и распознают путем выделения характеристики изображения в виде гистограммы ориентированного градиента (HOG). Способ выделения характеристики HOG представлен ниже: вычисляют градиент каждого пикселя изображения; делят изображение на множество ячеек, каждая ячейка, включающая в себя множество пикселей, и все соседние n ячеек составляют блок; подсчитывают гистограмму градиента всех пикселей в каждой ячейке, и выделяют характеристику HOG соответствующих блоков, в соответствии с гистограммой градиента всех ячеек в блоке; и выделяют характеристику HOG изображения в соответствии со статистическими данными характеристики HOG всех блоков.
Раскрытие изобретения
В данном раскрытии раскрыты способ и устройство выделения характеристики с учетом фактов предшествующего уровня техники. Способ представляет собой следующее:
В соответствии с первым аспектом настоящего раскрытия обеспечивается способ выделения характеристики, содержащий этапы, на которых: разделяют изображение на множество блоков, причем каждый блок содержит множество ячеек; выполняют разреженное разложение сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке; и выделяют характеристики гистограммы ориентированного градиента (HOG) изображения в соответствии с разреженными векторами.
В альтернативном варианте осуществления этап выполнения разреженного разложения сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке, содержит подэтапы, на которых: корректируют пиксели в каждой ячейке так, чтобы они составляли n*1-мерный вектор; и выполняют разреженное разложение сигнала для вектора в каждой ячейке, используя следующую формулу для получения соответствующих разреженных векторов:  при условии y=Dx; в котором y представляет собой вектор каждой ячейки, D представляет собой заданный перезаполненный словарь, x представляет собой разреженный вектор, выделенный путем выполнения разреженного разложения сигнала для у, в соответствии с перезаполненным словарем D, и ||x||1 представляет собой сумму абсолютного значения каждого столбца разреженного вектора x, в котором каждый разреженный вектор представляет собой m*1-мерный вектор, и перезаполненный словарь D представляет собой матрицу n*m.
при условии y=Dx; в котором y представляет собой вектор каждой ячейки, D представляет собой заданный перезаполненный словарь, x представляет собой разреженный вектор, выделенный путем выполнения разреженного разложения сигнала для у, в соответствии с перезаполненным словарем D, и ||x||1 представляет собой сумму абсолютного значения каждого столбца разреженного вектора x, в котором каждый разреженный вектор представляет собой m*1-мерный вектор, и перезаполненный словарь D представляет собой матрицу n*m.
В альтернативном варианте осуществления этап выделения характеристики гистограммы ориентированного градиента (HOG) изображения, в соответствии с разреженными векторами, содержит подэтапы, на которых: вычисляют магнитуду градиента и направления градиента каждой ячейки, в соответствии с разреженным вектором, выделения дескриптора каждой ячейки; выделяют характеристику HOG каждого блока на основе статистических данных соответствующих дескрипторов каждого блока; и выделяют характеристику HOG изображения на основе статистических данных характеристики HOG соответствующих блоков изображения.
В альтернативном варианте осуществления этап выделения характеристики HOG изображения на основе статистических данных характеристики HOG соответствующих блоков изображения, содержит подэтапы, на которых: каскадируют характеристику HOG соответствующих блоков изображения так, чтобы составить матрицу для получения характеристики HOG изображения, в котором каждый столбец матрицы представляет собой характеристику HOG блока.
В альтернативном варианте осуществления выделение характеристики HOG изображения на основе статистических данных характеристики HOG соответствующих блоков изображения, содержит этапы, на которых: корректируют характеристику HOG каждого блока изображения из исходного L*1-мерного вектора до M*N матрицы, в котором каждый блок содержит M*N пикселей, и L=M*N; выделяют характеристику HOG изображения, в соответствии со скорректированной характеристикой HOG каждого блока в соответствующее положение каждого блока в изображении.
В альтернативном варианте осуществления, способ дополнительно содержит этап, на котором: нормализуют изображение для получения изображения с заданным размером.
В соответствии со вторым аспектом настоящего раскрытия, обеспечивается устройство выделения характеристики, содержащее модуль разделения, выполненный с возможностью разделения изображения на множество блоков, причем каждый блок содержит множество ячеек; модуль разложения, выполненный с возможностью выполнения разреженного разложения сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке; и модуль выделения, выполненный с возможностью выделения характеристики гистограммы ориентированного градиента (HOG) изображения, в соответствии с разреженными векторами.
В альтернативном варианте осуществления, модуль разложения содержит первый подмодуль коррекции, выполненный с возможностью корректировки пикселей в каждой ячейке так, чтобы они составляли n*1-мерный вектор; и подмодуль разложения сигнала, выполненный с возможностью выполнения разреженного разложения сигнала для векторов в каждой ячейке, используя следующую формулу, для получения соответствующего разреженного вектора: при условии y=Dx; в которой у представляет собой вектор в каждой ячейке, D представляет собой заданный перезаполненный словарь, x представляет собой разреженный вектор, выделенный посредством осуществления разреженного разложения сигнала для у, в соответствии с перезаполненным словарем D, и  представляет собой суммирование абсолютного значения каждого столбца разреженного вектора x, в котором каждый разреженный вектор представляет собой m*1-мерный вектор, а перезаполненный словарь D представляет собой матрицу n*m.
представляет собой суммирование абсолютного значения каждого столбца разреженного вектора x, в котором каждый разреженный вектор представляет собой m*1-мерный вектор, а перезаполненный словарь D представляет собой матрицу n*m.
В альтернативном варианте осуществления, модуль выделения, содержит: подмодуль выполнения, выполненный с возможностью вычисления амплитуды градиента и направления градиента каждой ячейки в соответствии с разреженным вектором выделения дескриптора каждой ячейки; первый статистический подмодуль, выполненный с возможностью получения характеристики HOG каждого блока на основе статистических данных соответствующих дескрипторов каждого блока; и второй статистический подмодуль, выполненный с возможностью получения характеристики HOG изображения на основе статистических данных характеристики HOG соответствующих блоков изображения.
В альтернативном варианте осуществления второй статистический подмодуль выполнен с возможностью каскадирования характеристики HOG соответствующих блоков изображения для формирования матрицы, для получения характеристики HOG изображения, в котором каждый столбец матрицы представляет собой характеристику HOG блока.
В альтернативном варианте осуществления, второй статистический подмодуль содержит второй подмодуль коррекции, выполненный с возможностью коррекции характеристики HOG каждого блока в изображении от исходного L*1-мерного вектора до матрицы M*N, при этом каждый блок содержит M*N пикселей и L=M*N; и подмодуль выделения характеристики, выполненный с возможностью выделения характеристики HOG изображения, в соответствии со скорректированной характеристикой HOG каждого блока и соответствующего положения каждого блока в изображении.
В альтернативном варианте осуществления, устройство дополнительно содержит модуль обработки, выполненный с возможностью нормализации изображения для получения изображения с заданным размером.
В соответствии с третьим аспектом раскрытия, обеспечивается устройство выделения характеристики, устройство, содержащее: процессор; запоминающее устройство, используемое для хранения инструкций, выполняемых процессором; при этом процессор выполнен с возможностью: разделения изображения на множество блоков, причем каждый блок содержит множество ячеек; выполнения разреженного разложения сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке; и выделения характеристики гистограммы ориентированного градиента (HOG) изображения, в соответствии с разреженными векторами.
Техническое решение, предусмотренное в вариантах осуществления раскрытия, может иметь следующие предпочтительные эффекты:
В результате деления изображения на множество блоков, каждый блок, включающий в себя множество ячеек, выполнения разреженного разложения сигнала для каждой ячейки, для получения разреженного вектора, соответствующего каждой ячейке, и выделения характеристики гистограммы ориентированного градиента (HOG) изображения, в соответствии с разреженными векторами, решается проблема, состоящая в том, что отношение и точность обнаружения являются относительно низкими при распознавании структур, в результате непосредственного расчета в области пространства изображения в процессе выделения характеристики HOG; этот эффект достигается тем, что отношение и точность обнаружения улучшаются при распознавании структур в результате выделения характеристики HOG в области частоты.
Следует понимать, что как представленное выше общее описание, так и следующее подробное описание изобретения представляют собой только примеры и не являются ограничительным раскрытием.
Краткое описание чертежей
На приложенных чертежах, которые представлены здесь и составляют часть данного описания, иллюстрируются варианты осуществления в соответствии с изобретением и, вместе с описанием, используются для пояснения принципов изобретения.
На фиг. 1 показана блок-схема последовательности операций, представляющая способ для характерного выделения в соответствии с примерным вариантом осуществления.
На фиг. 2А показана блок-схема последовательности операций, представляющая способ для характерного выделения в соответствии с другим примерным вариантом осуществления.
На фиг. 2В показана блок-схема последовательности операций, представляющая способ для разделения изображения в соответствии с примерным вариантом осуществления.
На фиг. 2С показана блок-схема последовательности операций, представляющая способ для разделения изображения в соответствии с другим примерным вариантом осуществления.
На фиг. 2D показана блок-схема последовательности операций, представляющая способ для коррекции пикселей ячейки в соответствии с примерным вариантом осуществления.
На фиг. 2Е показана блок-схема последовательности операций, представляющая способ для статистики характеристики HOG в блоке в соответствии с примерным вариантом осуществления.
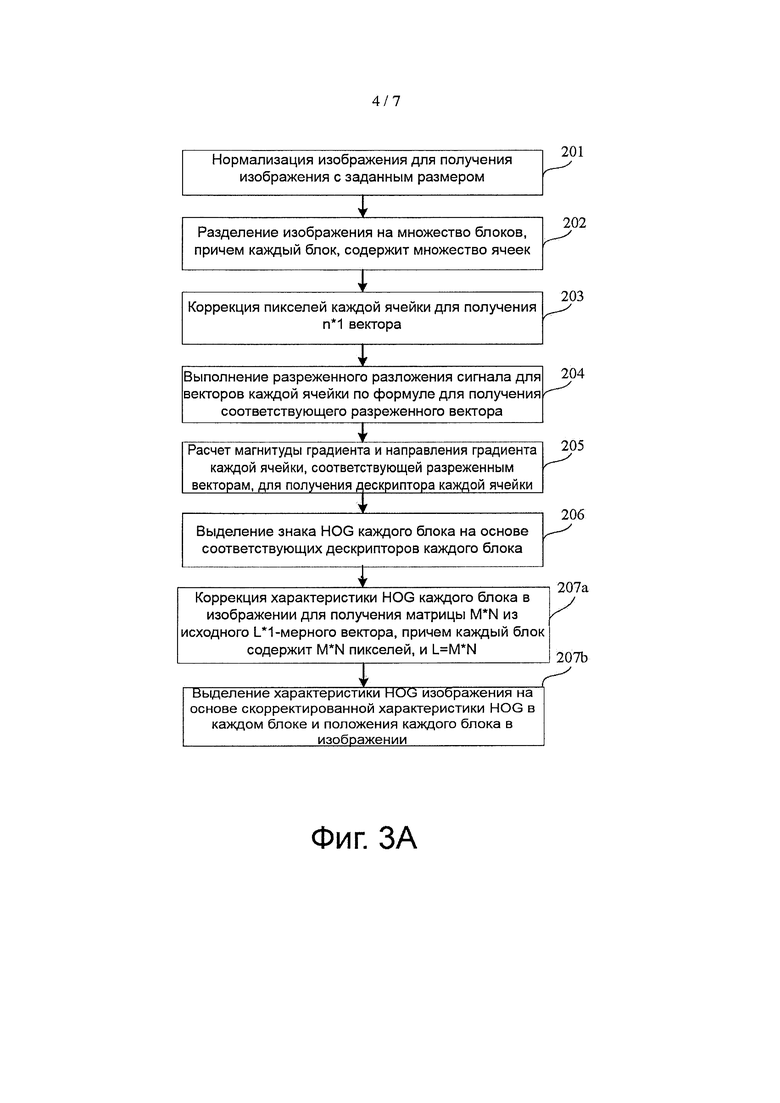
На фиг. 3А показана блок-схема последовательности операций, представляющая способ для характерного выделения в соответствии с примерным вариантом осуществления.
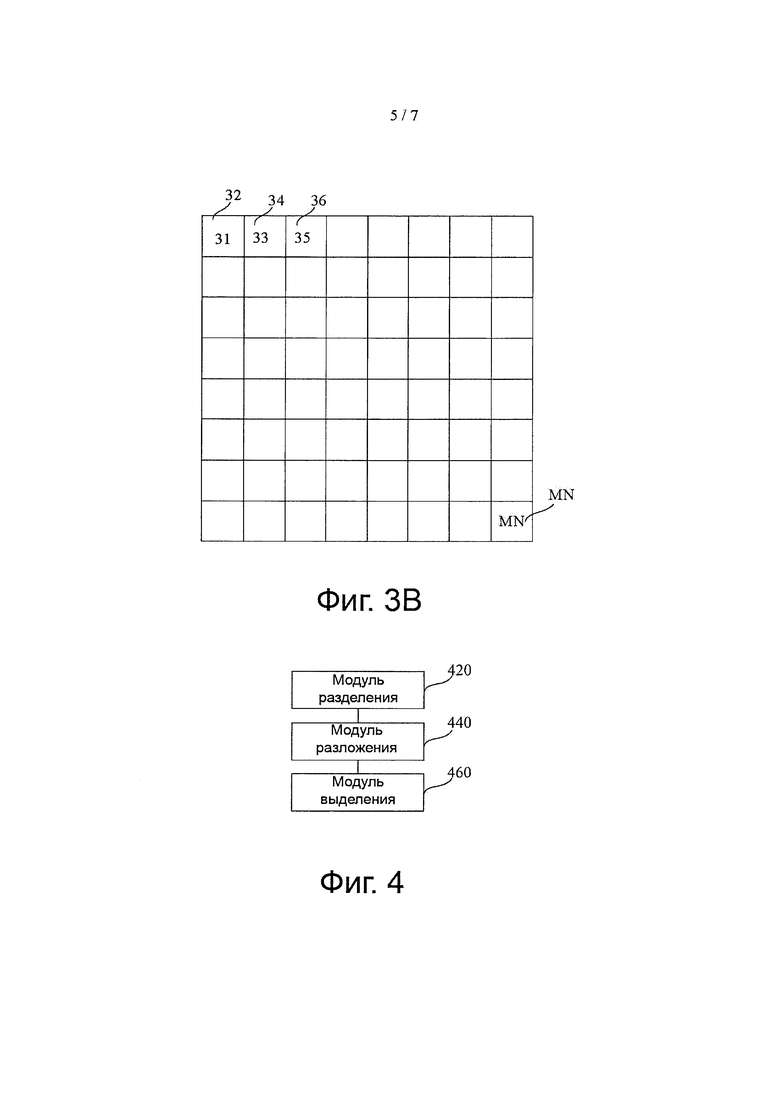
На фиг. 3В показана блок-схема последовательности операций, представляющая способ для статистики характеристики HOG изображения в соответствии с примерным вариантом осуществления.
На фиг. 4 показана блок-схема, представляющая устройство для характерного выделения в соответствии с примерным вариантом осуществления.
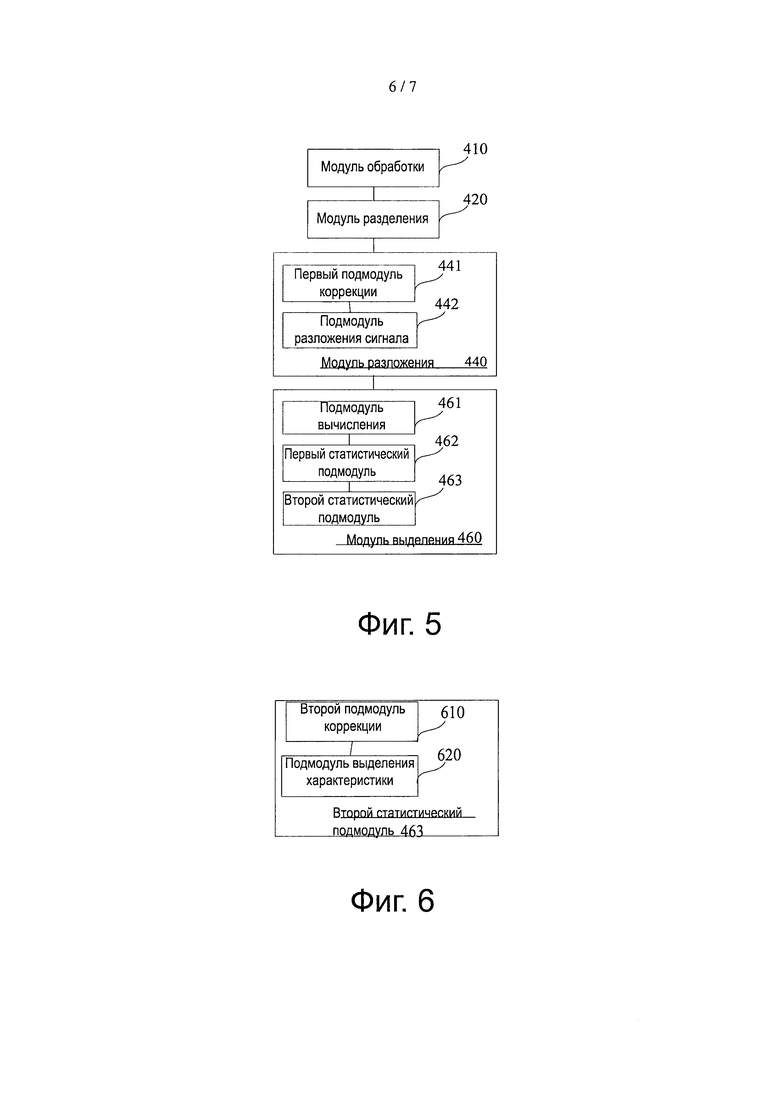
На фиг. 5 показана блок-схема, представляющая устройство для характерного выделения в соответствии с другим примерным вариантом осуществления.
На фиг. 6 показана блок-схема, представляющая подмодули устройства для характерного выделения в соответствии с примерным вариантом осуществления.
На фиг. 7 показана блок-схема, представляющая устройство для характерного выделения в соответствии с другим примерным вариантом осуществления.
Осуществление изобретения
Далее будет сделана ссылка на подробное описание примерных вариантов осуществления, примеры которых иллюстрируются на приложенных чертежах. В следующем описании делается ссылка на приложенные чертежи, на которых одинаковые номерами на разных чертежах представлены одинаковые или аналогичные элементы, если только не описано другое. Варианты осуществления, представленные в следующем описании примерных вариантов осуществления, не представляют все варианты осуществления в соответствии с изобретением. Вместо этого, они представляют собой просто примеры устройств и способов, соответствующих аспектам, относящимся к изобретению, как представлено в приложенной формуле изобретения.
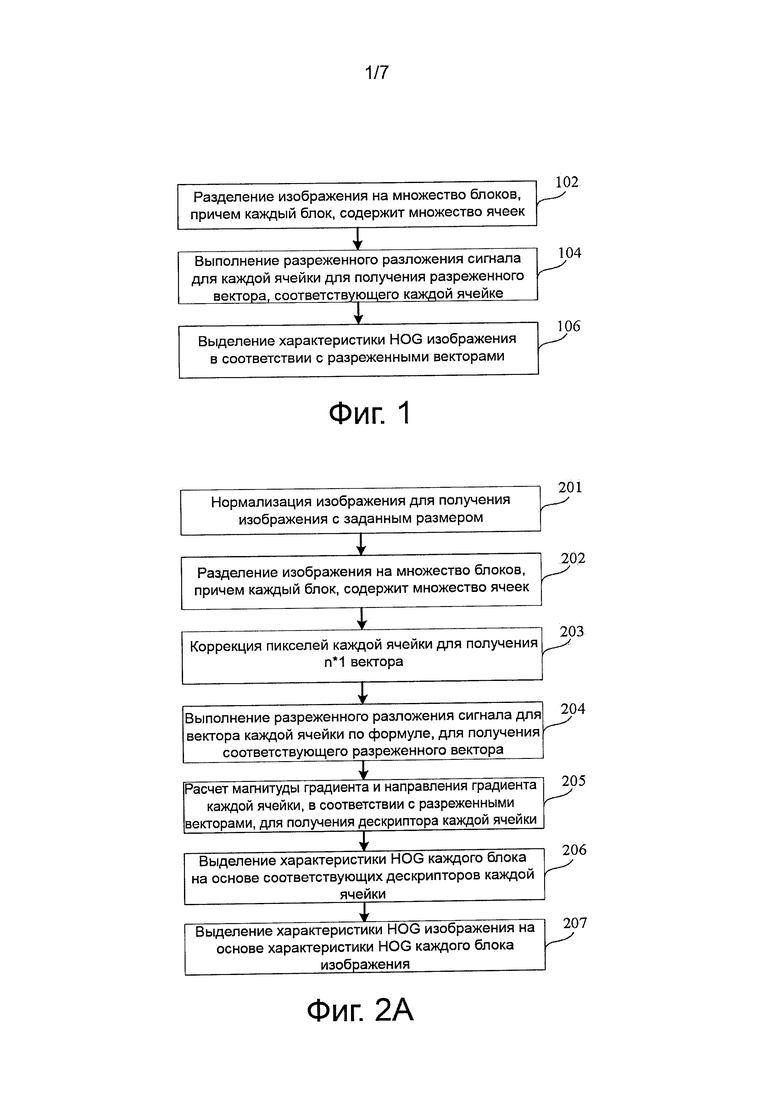
На фиг. 1 показана блок-схема последовательности операций, представляющая способ выделения характеристики, в соответствии с примерным вариантом осуществления. Как показано на фиг. 1, в варианте осуществления, способ представлен на примере при использовании в виде аппаратных средств для распознавания структур, и способ может включать в себя следующие этапы.
На этапе 102, разделяют изображение на множество блоков, при этом каждый блок включает в себя множество ячеек.
На этапе 104 выполняют разреженное разложение сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке.
Разреженное разложение сигнала используется для преобразования заданного наблюдаемого сигнала в разреженный вектор, в соответствии с правилом разложения, и множество элементов в разреженном сигнале равно нулю. В варианте осуществления пиксели каждой ячейки используются, как заданный наблюдаемый сигнал, таким образом, что может быть выделен соответствующий разреженный сигнал каждой ячейки.
На этапе 106 выделяют характеристику гистограммы ориентированного градиента (HOG) изображения, в соответствии с разреженными векторами.
Терминал выделяет характеристику HOG изображения, в соответствии с разреженным вектором, выделяемым при разреженном разложении сигнала.
В общем, в способе выделения характеристики, предусмотренном в варианте осуществления раскрытия, путем разделения изображения на множество блоков, причем каждый блок включает в себя множество ячеек; выполнения разреженного разложения сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке; выделения характеристики гистограммы ориентированного градиента (HOG) изображения, в соответствии с разреженными векторами; решается проблема, состоящая в том, что отношение и точность обнаружения являются относительно низкими при распознавании структур в результате непосредственного расчета в области пространства изображения при обработке выделения характеристики HOG; этот эффект достигается тем, что отношение обнаружения и точности улучшается при распознавании структур, путем выделения характеристики HOG в области частот.
На фиг. 2А показана блок-схема последовательности операций, представляющая способ выделения характеристики, в соответствии с другим примерным вариантом осуществления. Как показано на фиг. 2А, в варианте осуществления, способ иллюстрируется для использования в виде аппаратных средств для распознавания структур, и способ включает в себя следующие этапы.
На этапе 201, нормализуют изображение, для получения изображения с заданным размером.
Распознавание структур, в общем, предполагает выделение характеристики для множества изображений. Перед выделением характеристики для изображения терминал нормализует изображение таким образом, что изображения с разными размерами могут быть преобразованы так, чтобы они имели заданный размер для их однородной обработки.
На этапе 202 изображение делят на множество блоков, причем каждый блок включает в себя множество ячеек.
В качестве альтернативы, разделение нормализованного изображения может включать в себя этапы, на которых: делят изображения на множество блоков, и затем делят каждый блок на множество ячеек.
В качестве альтернативы, деление нормализованного изображения, включает в себя этапы, на которых: делят изображение на множество ячеек, и затем составляют блок из соседних ячеек, каждый блок, включающий в себя множество ячеек. Например, блок может быть составлен из четырех попарных соседних ячеек, сформированных в виде таблицы 2*2.
При обработке деления изображения в варианте осуществления порядок разделения блоков и разделения ячеек не ограничен чем-либо конкретным. Блоки могут быть разделены, и затем ячейки могут быть разделены, или ячейки могут быть разделены, и затем могут быть разделены блоки.
В варианте осуществления специально не ограничено, существует ли наложение между разделенными блоками изображения. Здесь может присутствовать наложение или здесь может не быть наложения между блоками.
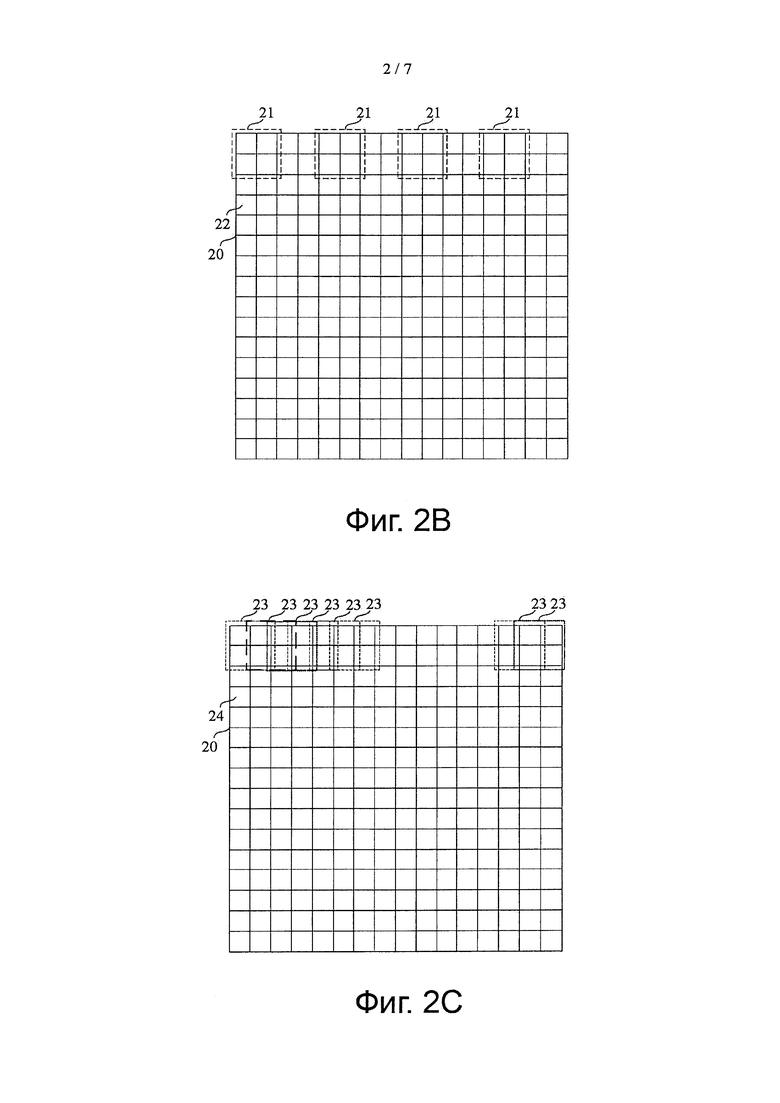
Например, изображение 128 пикселей * 128 пикселей может быть вначале разделено на блоки 21 размером 16 пикселей * 16 пикселей с блоками без наложения друг на друга, и затем каждый блок 21 из 16 пикселей * 16 пикселей может быть разделен на ячейки 22 размером 8 пикселей * 8 пикселей, таким образом, изображение включает в себя 8*8=64 блока, которые не имеют наложения друг на друга, и каждый блок включает в себя 2*2=4 ячейки, как показано на фиг. 2В.
Например, изображение 128 пикселей * 128 пикселей может быть вначале разделено на блоки 23 размером 16 пикселей * 16 пикселей, при этом блоки наложены друг на друга, и затем каждый блок 23 размером 16 пикселей * 16 пикселей может быть разделен на ячейки 24 размером 8 пикселей * 8 пикселей, таким образом, изображение включает в себя 16*16=256 блоков, которые имеют наложение друг на друга, и каждый блок включает в себя 2*2=4 ячейки, как показано на фиг. 2С.
На этапе 203 пиксели каждой ячейки корректируют, чтобы получить n*1-мерный вектор.
После разделения изображения, пиксели каждой ячейки можно рассматривать, как матрицу, и матрицу, соответствующую пикселям каждой ячейки, корректируют так, чтобы она представляла собой n*1-мерный вектор.
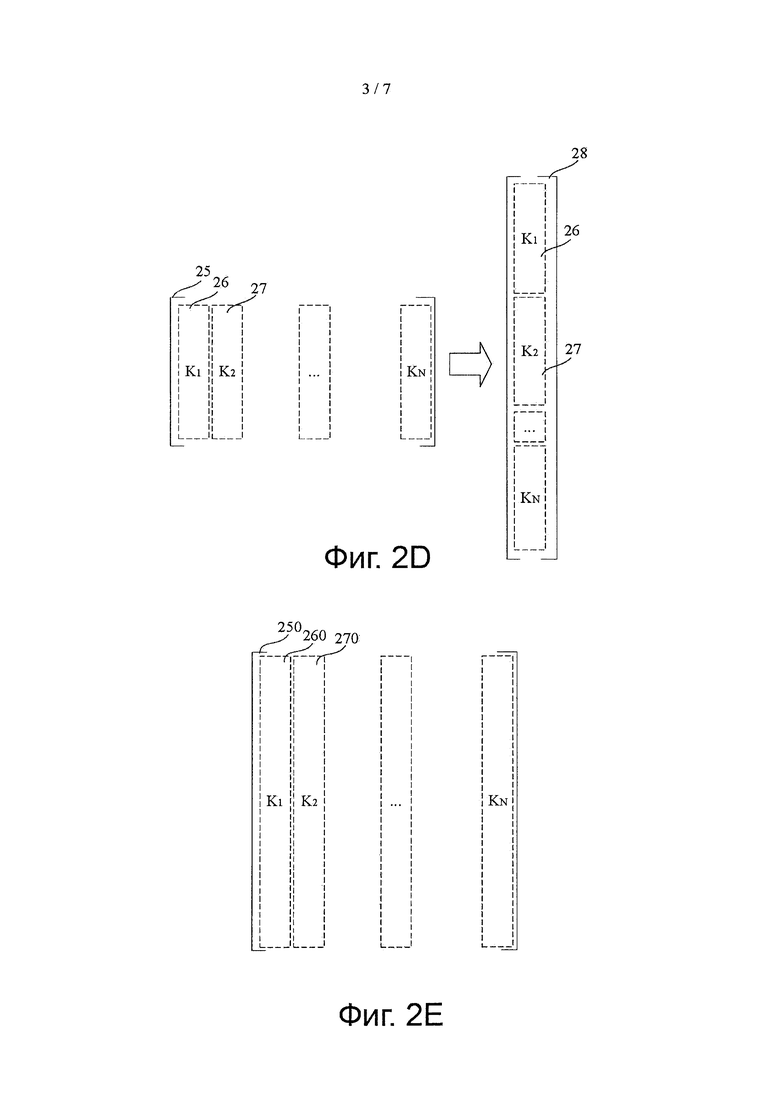
При обработке корректирования матрицы второй столбец K227 в матрице 25 соответствующей пикселям, каскадируют, так, чтобы он находился под первым столбцом K126, и третий столбец (не показан на фигуре) в матрице 25, соответствующей пикселям, каскадируют так, чтобы он находился под вторым столбцом K227 и т.п. Матрицу 25, соответствующую пикселям каждой ячейки, корректируют так, чтобы составлялся n*1-мерный вектор 28. Как показано на фиг. 2D.
На этапе 204, вектор каждой ячейки выполняет разреженное разложение сигнала для использования следующей формулы, для получения соответствующего разреженного вектора:
 при условии y=Dx.
при условии y=Dx.
В котором у представляет собой вектор каждой ячейки, D представляет собой заданный перезаполненный словарь, x представляет собой разреженный вектор, выделенный путем выполнения разреженного разложения сигнала для y, в соответствии с перезаполненным словарем D, и  представляет собой суммирование абсолютного значения каждого столбца разреженного вектора x, в котором каждый разреженный вектор представляет собой m*1-мерный вектор, и перезаполненный словарь D представляет собой матрицу n*m.
представляет собой суммирование абсолютного значения каждого столбца разреженного вектора x, в котором каждый разреженный вектор представляет собой m*1-мерный вектор, и перезаполненный словарь D представляет собой матрицу n*m.
Для каждой ячейки изображения терминал вначале определяет перезаполненный словарь D, обслуживает вектор каждой ячейки, как заданный наблюдаемым сигналом у, и рассчитывает разреженный вектор x для вектора каждой ячейки, используя представленную выше формулу, в соответствии с заданным перезаполненным словарем D. Поскольку скорректированный вектор каждой ячейки имеет n*1 измерение, и перезаполненный словарь D, заданный терминалом, представляет собой матрицу n*m, рассчитанный разреженный вектор, использующий представленную выше формулу, соответствующую вектору каждой ячейки, имеет размер m*1.
На этапе 205 рассчитывают магнитуду градиента и направление градиента каждой ячейки, в соответствии с разреженным вектором, выделения дескриптора каждой ячейки.
Поперечный градиент и продольный градиент разреженного разложенного сигнала каждого пикселя каждой ячейки рассчитывают, используя оператор градиента.
Таким образом, для каждого элемента разреженного вектора, соответствующего каждой ячейке, поперечный градиент и продольный градиент рассчитывают, используя оператор градиента.
Например, часто используемые операторы градиента представлены в следующей таблице.
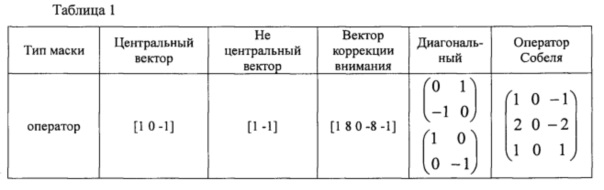
В варианте осуществления, если рассчитан градиент пикселей каждой ячейки, может быть выбран любой оператор градиента в Таблице 1, или также может быть выбран другой оператор градиента. Выбор оператора градиента в варианте осуществления не ограничен чем-либо конкретным.
Предположим, что поперечный градиент элемента в разреженном векторе составляет Н (x, y), и продольный градиент представляет V (x, y), и направление градиента и магнитуда градиента, соответствующая элементу разреженного вектора, могут быть рассчитаны по формулам (1) и (2), как представлено ниже:


где θ (x, у) представляет собой направление градиента для элемента (x, у) в разреженном сигнале, и m (x, у) представляет собой магнитуду градиента элемента (x, у).
Направление θ(x, у) градиента находится в диапазоне от -90 градусов до 90 градусов. Деление направления градиента θ (x, y) равномерно на z частей, получение статистических данных каждого участка, разделенного на направление градиента в соответствии с весом m (x, у) для всех элементов в разреженном векторе, соответствующем каждой ячейке, и z-мерный вектор выделяют для каждой ячейки, в конечном итоге, то есть, выделяют дескриптор, соответствующий каждой ячейке.
Например, направление градиента θ (x, у) делят на 9 участков, и угол, соответствующий каждому участку, составляет 20 градусов. Для всех элементов в разреженном сигнале, соответствующем каждой ячейке, получают статистические данные в соответствии с весом m (x, у) для всех 20 градусов, и, наконец, выделяют 9-мерный вектор, соответствующий каждой ячейке.
В варианте осуществления, специально не ограничивается, на какое количество участков делят направление градиента.
На этапе 206 получают статистические данных для всех дескрипторов соответствующих блоков, для получения характеристики HOG соответствующих блоков.
Терминал получает статистические данных для рассчитанного дескриптора каждой ячейки, включенной в каждый блок, для получения характеристики HOG каждого блока.
При получении статистики для рассчитанного дескриптора каждой ячейки, терминал может каскадировать дескрипторы, соответствующие всем ячейкам таким образом, что характеристика HOG каждого блока представляет собой вектор, размер которого составляет к раз размера дескриптора, соответствующего ячейкам, включенным в блок.
Например, дескриптор в каждой ячейке представляет собой 9-мерный вектор, и каждый блок включает в себя 4 ячейки. Таким образом, 9-мерные дескрипторы в 4 ячейках каскадируют так, чтобы получить 36-мерный вектор, который используется, как характеристика HOG соответствующего блока.
На этапе 207 получают статистическую характеристику HOG каждого блока для получения характеристики HOG изображения.
Терминал формирует статистические данные для характеристики HOG соответствующих блоков для изображения, для получения характеристики HOG изображения. Терминал каскадирует характеристику HOG соответствующих блоков так, чтобы получить матрицу, для получения характеристики HOG изображения, в котором каждый столбец матрицы представляет собой характеристику HOG блока.
Например, изображение включает в себя K блоков, и характеристика HOG каждого блока составляет Ki, таким образом, Ki характеристики HOG каскадируют так, чтобы составить матрицу 250. K1 помещают в первом столбце 260 каскадированной матрицы, и K2 помещают во втором столбце 270 каскадированной матрицы, и т.д., как показано на фиг. 2Е.
В общем, в способе выделения характеристики в варианте осуществления раскрытия, путем деления изображения на множество блоков, каждый блок, включающий в себя множество ячеек; корректирования пикселей каждой ячейки так, чтобы получить n*1-мерный вектор; выполнения разреженного разложения сигнала для каждой ячейки для получения разреженного вектора, используя формулы, соответствующие каждой ячейке; расчета магнитуды градиента и направления градиента каждой ячейки в соответствии с разреженным сигналом, для получения дескриптора каждой ячейки; формирования статистических данных каждого дескриптора каждой ячейки, для получения характеристики HOG соответствующих блоков; формирования статистических данных для характеристики HOG каждой ячейки, для получения характеристики HOG изображения; решают проблему, состоящую в том, что отношение и точность обнаружения являются относительно низкими при распознавании структур в результате прямого расчета в области пространственного изображения при обработке выделения характеристики HOG; этот эффект достигается в результате того, что улучшают отношение и точность обнаружения при распознавании структур, путем выделения характеристики HOG в области частоты.
В альтернативном варианте осуществления, показанном на фиг. 2А, при обработке получения статистических данных характеристики HOG каждого блока изображения для получения характеристики HOG изображения, они могут быть размещены в соответствии с соответствующим положением в изображении. Этап 207 может быть заменен этапами 207а и 207b, как показано на фиг. 3А.
На этапе 207а, характеристику HOG каждого блока в изображении корректируют так, чтобы оно составляло матрицу M*N для исходного L*1-мерного вектора, каждого блока, включающего в себя M*N пикселей и L=M*N.
Характеристика HOG каждого блока представляет собой L*1-мерный вектор, каскадированный дескриптором, соответствующим каждой ячейке. L*1-мерный вектор корректируют так, чтобы он представлял собой матрицу M*N, то есть L*1-мерный вектор каждого блока корректируют так, чтобы он представлял собой соответствующую матрицу, в соответствии с включенными ячейками, в котором каждый столбец соответствующей матрицы представляет собой дескриптор ячейки; и затем дескрипторы каждой ячейки корректируют в соответствии с соответствующими пикселями, в котором каждый столбец корректируемой матрицы представляет собой характеристику HOG, соответствующую пикселям соответствующих столбцов в соответствующем блоке.
На этапе 207b характеристику HOG изображения выделяют в соответствии со скорректированной характеристикой HOG каждого блока и соответствующим положением каждого блока в изображении.
В соответствии со скорректированной характеристикой HOG каждого блока и соответствующим положением каждого блока в изображении выделяют характеристику HOG положения соответствующего пикселя в изображении.
Например, изображение включает в себя K блоков, и характеристика HOG соответствующих блоков представляет собой Ki, таким образом, Ki характеристик HOG корректируют так, чтобы составить матрицу M*N. Скорректированная матрица 31 из K1 размещена в положении в изображении, соответствующем первому блоку 32, и скорректированная матрица 33 из K2 размещена в положении в изображении, соответствующем второму блоку 34, и т.д. В конечном итоге, матрицу MN размещают в положении, соответствующем положению последнего MN блока в изображении, как показано на фиг. 3В.
В общем, в способе для характеристики выделения, предусмотренном в варианте осуществления, путем корректирования характеристики HOG каждого блока в изображении от исходного L*1-мерного вектора до M*N матрицы, каждый блок включает в себя M*N пикселей, и L=M*N; характеристика HOG изображения может быть выделена в соответствии со скорректированной характеристикой HOG каждого блока и соответствующим положением каждого блока изображения, таким образом, чтобы получить характеристику HOG изображения; и, таким образом, обеспечить, чтобы выделенная характеристика HOG изображения соответствовала соответствующему положению каждого блока в изображении для подчеркивания характеристики каждого блока изображения.
Далее представлены варианты осуществления для устройства раскрытия, которое можно использовать для выполнения способа, как показано в вариантах осуществления раскрытия. Что касается деталей, не показанных в вариантах осуществления для устройства раскрытия, пожалуйста, обратитесь к вариантам осуществления, направленным на способ раскрытия.
На фиг. 4 показана блок-схема, представляющая устройство выделения характеристики в соответствии с примерным вариантом осуществления. Как показано на фиг. 4, устройство выделения характеристики включает в себя, но не ограничено этим:
Модуль 420 разделения, выполненный с возможностью разделения изображения на множество блоков, каждый блок, включающий в себя множество ячеек.
Модуль 440 разложения, выполненный с возможностью выполнения разреженного разложения сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке.
Разреженное разложение сигнала выполняют для преобразования заданного наблюдаемого сигнала так, чтобы получить из него разреженный вектор в соответствии с правилом разложения, и множество элементов в разреженном сигнале равны нулю. В варианте осуществления пиксели каждой ячейки используются, как заданный наблюдаемый сигнал таким образом, что может быть выделен соответствующий разреженный сигнал каждой ячейки.
Модуль 460 выделения выполнен с возможностью выделения характеристики гистограммы ориентированного градиента (HOG) изображения в соответствии с разреженными векторами.
В общем, в устройстве выделения характеристики, предусмотренном в варианте осуществления раскрытия, путем разделения изображения на множество блоков, каждый блок, включающий в себя множество ячеек; путем выполнения разреженного разложения сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке; выделяя характеристики гистограммы ориентированного градиента (HOG) изображения в соответствии с разреженными векторами; решается проблема относительно низких отношения и точности обнаружения при распознавании структур в результате прямого расчета в области пространства изображения при обработке выделения характеристики HOG; достигается эффект, состоящий в том, что отношение и точность обнаружения улучшаются при распознавании структур, путем выделения характеристики HOG в области частоты.
На фиг. 5 показана блок-схема, представляющая устройство выделения характеристики, в соответствии с другим примерным вариантом осуществления. Как представлено на фиг. 5, устройство выделения характеристики включает в себя, но не ограничено этим:
Модуль 410 обработки, выполненный с возможностью нормализации изображения для получения изображения с заданным размером.
Распознавание структур, в общем, подразумевает выделение характеристики для множества изображений. Перед выделением характеристики для изображения, модуль 410 обработки нормализует изображение так, чтобы изображения с разными размерами могли быть преобразованы так, чтобы они имели заданный размер для однородной обработки.
Модуль 420 разделения выполнен с возможностью разделения изображения на множество блоков, каждый блок, включающий в себя множество ячеек.
В качестве альтернативы, разделение нормализованного изображения с помощью модуля 420 разделения включает в себя: разделяют изображения на множество блоков и затем разделяют каждый блок на множество ячеек.
В качестве альтернативы, разделение нормализованного изображения модулем 420 разделения включает в себя: разделяют изображения на множество ячеек, и затем составляют блок из соседних ячеек, каждый блок, включающий в себя множество ячеек. Например, блок может быть составлен из четырех попарных соседних ячеек в форме таблицы 2*2.
При обработке разделения изображения в варианте осуществления порядок разделения блоков и разделения ячеек не ограничен чем-либо конкретным. Блоки могут быть разделены, и затем ячейки могут быть разделены, или ячейки могут быть разделены и затем могут быть разделены блоки.
В варианте осуществления, в частности, не ограничено, присутствует ли перекрытие между разделенными блоками изображения. Здесь может присутствовать перекрытие или может отсутствовать перекрытие между блоками.
Модуль 440 разложения выполнен с возможностью выполнения разреженного разложения сигнала для каждой ячейки, для получения разреженного вектора, соответствующего каждой ячейке.
Разреженное разложение сигнала выполняют для преобразования заданного наблюдаемого сигнала так, чтобы он представлял собой разреженный вектор, в соответствии с правилом разложения, и множество элементов разреженного сигнала равны нулю.
В варианте осуществления модуль 440 разложения может включать в себя следующие подмодули:
Первый корректирующий подмодуль 441, выполненный с возможностью корректирования пикселей в каждой ячейке, так, чтобы они составляли m*1-мерный вектор.
После разделения изображения, пиксели в каждой ячейке можно рассматривать, как матрицу, и первый корректирующий подмодуль 441 корректирует матрицу, соответствующую пикселям в каждой ячейке, так, чтобы составить n*1-мерный вектор.
Подмодуль 442 разложения сигнала выполнен с возможностью выполнения разреженного разложения сигнала для вектора каждой ячейки, используя следующую формулу, для получения соответствующего разреженного вектора:
 при условии y=Dx.
при условии y=Dx.
В котором y представляет собой вектор каждой ячейки, D представляет собой заданный перезаполненный словарь, x представляет собой разреженный вектор, выделенный путем выполнения разреженного разложения сигнала для у, в соответствии с перезаполненным словарем D, и  представляет собой суммирование абсолютного значения каждого столбца разреженного вектора x, в котором каждый разреженный вектор представляет собой m*1-мерный вектор, и перезаполненный словарь D представляет собой матрицу n*m.
представляет собой суммирование абсолютного значения каждого столбца разреженного вектора x, в котором каждый разреженный вектор представляет собой m*1-мерный вектор, и перезаполненный словарь D представляет собой матрицу n*m.
Для каждой ячейки в изображении терминал заранее определяет перезаполненный словарь D, обслуживает вектор каждой ячейки, как заданный наблюдаемый сигнал у, и рассчитывает разреженный вектор x для вектора каждой ячейки, используя описанную выше формулу, в соответствии с заданным перезаполненным словарем D. Поскольку скорректированный вектор каждой ячейки является n*1-мерным, и перезаполненный словарь D, предварительно определенный терминалом, представляет собой n*m матрицу, рассчитанный разреженный вектор, используя описанную выше формулу, соответствующую вектору каждой ячейки, является m*1-мерным.
Модуль 460 выделения выполнен с возможностью выделения характеристики гистограммы ориентированного градиента (HOG) для изображения, соответствующего разреженным векторам.
В варианте осуществления модуль 460 выделения может включать в себя следующие подмодули:
Подмодуль 461 расчета, выполненный с возможностью расчета магнитуды градиента и направления градиента каждой ячейки, в соответствии с разреженным вектором, выделения дескриптора каждой ячейки.
Используя оператор градиента, при расчете подмодуля 461 рассчитывают DCT-преобразованный или DFT-преобразованный поперечный градиент и продольный градиент каждого пикселя в каждой ячейке.
Выбор оператора градиента в варианте осуществления не ограничен чем-либо конкретным.
Предположим, что поперечный градиент элемента в разреженном векторе представляет собой Н (x, y), и продольный градиент представляет собой V (x, y), и направление градиента и магнитуда градиента, соответствующие пикселю, могут быть рассчитаны с помощью формул (1) и (2), представленных ниже:


где θ (x, y) представляет собой направление градиента элемента (x, y) в разреженном сигнале, и m (x, у) представляет собой магнитуду градиента элемента (x, у).
Направление градиента θ (x, y) находится в диапазоне от -90 градусов до 90 градусов. Направление градиента θ (x, y) равномерно разделяют на z участков, получают статистические данные для каждого участка, разделенного на направление градиента, в соответствии с весом m (x, y) для всех элементов разреженного вектора, соответствующего каждой ячейке, и в конечном итоге выделяют z-мерный вектор, выделенный для каждой ячейки, то есть, выделяют дескриптор, соответствующий каждой ячейке.
В варианте осуществления, количество участков, на которые разделяют направление градиента, не ограничено чем-либо конкретным.
Первый статистический подмодуль 462 сконфигурирован так, чтобы получать статистические данные для соответствующих дескрипторов соответствующих блоков, для получения характеристики HOG каждого блока.
Первый статистический подмодуль 462 получает статистические данные для расчетного дескриптора каждой ячейки, включенной в каждый блок, для получения характеристики HOG каждого блока.
При составлении статистики для расчетного дескриптора каждой ячейки, первый статистический подмодуль 462 может каскадировать дескрипторы, соответствующие всем ячейкам таким образом, что характеристика HOG каждого блока представляет собой вектор, размер которого составляет k раз размера дескриптора, соответствующего ячейкам, включенным в блок.
Второй статистический подмодуль 463 конфигурируют так, чтобы получить статистические данные характеристики HOG соответствующих блоков для получения характеристики HOG изображения.
Второй статистический подмодуль 463 получает статистические данные характеристики HOG соответствующих блоков в изображении для получения характеристики HOG изображения.
В качестве альтернативы, второй статистический подмодуль 463 каскадирует характеристику HOG соответствующих блоков, так, чтобы получить матрицу для получения характеристики HOG изображения, в которой каждый столбец матрицы представляет собой характеристику HOG блока.
В общем, в устройстве выделения характеристики в вариантах осуществления раскрытия, путем разделения изображения на множество блоков, причем каждый блок включает в себя множество ячеек; корректирования пикселей в каждой ячейке так, чтобы получить n*1-мерный вектор; выполнения разреженного разложения сигнала для каждой ячейки, используя формулы, для получения разреженного вектора, соответствующего каждой ячейке; расчета магнитуды градиента и направления градиента каждой ячейки, в соответствии с разреженным сигналом для получения дескриптора каждой ячейки; получения статистики каждого дескриптора в каждой ячейке для получения характеристики HOG каждого блока; получения статистики характеристики HOG каждой ячейки для получения характеристики HOG изображения; решается проблема относительно низких отношения и точности обнаружения при распознавании структур в результате прямого расчета в области пространства изображения при обработке характеристики при выделения HOG; достигается такой эффект, что отношение и точность обнаружения улучшаются при распознавании структур, путем выделения характеристики HOG в области частот.
В альтернативном варианте осуществления, показанном на фиг. 5, как показано на фиг. 6, второй статистический подмодуль 463 может включать в себя следующие подмодули.
Второй подмодуль 610 корректирования выполненный с возможностью корректирования характеристики HOG каждого блока в изображении, так, чтобы получить матрицу M*N из исходного L*1-мерного вектора, каждого блока, включающего в себя M*N пикселей, и L=M*N.
Характеристика HOG каждого блока представляет собой L*1-мерный вектор, каскадированный дескрипторами, соответствующими каждой ячейке. Подмодуль 610 корректирования корректирует L*1-мерный вектор, так, чтобы получить M*N матрицу, то есть, L*1-мерный вектор в каждом блоке корректируют так, чтобы он представлял собой соответствующую матрицу, в соответствии с включенными ячейками, в котором каждый столбец соответствующей матрицы представляет собой дескриптор ячейки; и затем дескриптор каждой ячейки корректируют в соответствии с соответствующими пикселями, в котором каждый столбец скорректированной матрицы представляет собой характеристику HOG, соответствующую пикселям соответствующего столбца, в соответствующем блоке.
Подмодуль 620 выделения характеристики выполнен с возможностью выделения характеристики HOG изображения, в соответствии со скорректированной характеристикой HOG каждого блока и в соответствующем положении каждого блока в изображении.
Подмодуль 620 выделения характеристики выделяет характеристику HOG изображения, в соответствии со скорректированной характеристикой HOG каждого блока и соответствующим положением каждого блока в изображении.
В общем, в устройстве выделения характеристики, предусмотренном в варианте осуществления, путем корректирования характеристики HOG каждого блока в изображении от исходного L*1-мерного вектора до M*N матрицы, каждый блок, включающий в себя M*N пикселей, и L=M*N; может быть выделена характеристика HOG изображения в соответствии со скорректированной характеристикой HOG каждого блока и соответствующим положением каждого блока в изображении таким образом, чтобы получить характеристику HOG изображения; и, таким образом, обеспечивается соответствие выделенной характеристики HOG изображения соответствующему положению каждого блока в изображении для подчеркивания характеристики каждого блока в изображении.
Что касается устройств в описанных выше вариантах осуществления, соответствующие подходы выполнения операции конкретными модулями были описаны подробно в вариантах осуществления, относящихся к соответствующим способам, и не будут здесь рассмотрены.
В примерном варианте осуществления раскрытия предусмотрено устройство выделения характеристики, которое может воплощать способ выделения характеристики, предусмотренный в раскрытии, устройство, включающее в себя: процессор; запоминающее устройство, используемое для хранения выполняемых процессором инструкций;
в котором процессор выполнен с возможностью:
разделять изображение на множество блоков, причем каждый блок включает в себя множество ячеек;
выполнять разреженное разложение сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке; и
выделять характеристику гистограммы ориентированного градиента (HOG) изображения, в соответствии с разреженными векторами.
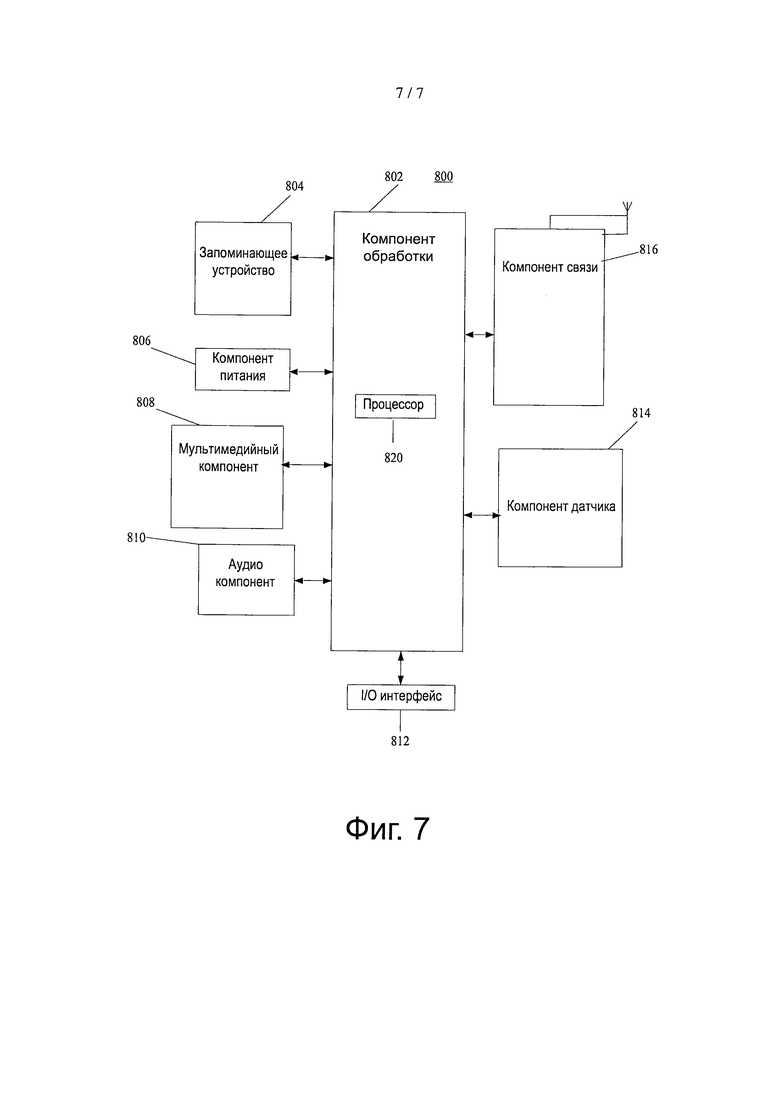
На фиг. 7 показана блок-схема устройства 700 для деинсталяции приложения в соответствии с примерным вариантом осуществления. Например, устройство 700 может представлять собой мобильный телефон, компьютер, терминал цифровой широковещательной передачи, устройство обмена сообщениями, игровую консоль, планшетный компьютер, медицинское устройство, тренажерное оборудование, персональный карманный компьютер и т.п.
На фиг. 7 показано устройство 700, которое может включать в себя один или больше из следующих компонентов: компонент 702 обработки, запоминающее устройство 704, компонент 706 питания, мультимедийный компонент 708, аудио компонент 710, интерфейс 712 ввода/вывода (I/O), компонент 714 датчика и компонент 716 связи.
Компонент обработки 702 обычно управляет общими операциями устройства 700, такими как операции, ассоциированные с отображением, телефонными звонками, передачей данных, операциями камеры и операциями записи. Компонент 702 обработки может включать в себя один или более процессоров 718 для выполнения инструкций для выполнения всех или части этапов в описанных выше способах. Кроме того, компонент 702 обработки может включать в себя один или более модулей, которые способствуют взаимодействию между компонентом 702 обработки и другими компонентами. Например, компонент 702 обработки может включать в себя мультимедийный модуль для того, чтобы способствовать взаимодействию между мультимедийным компонентом 708 и компонентом 702 обработки.
Запоминающее устройство 704 выполнено с возможностью сохранения различных типов данных для поддержания операции устройства 700. Примеры таких данных включают в себя инструкции для любых приложений или способов, работающих в устройстве 700, контактные данные, данные телефонной книги, сообщения, изображения, видеоданные и т.д. Запоминающее устройство 704 может быть воплощено, используя любой тип из энергозависимых или энергонезависимых запоминающих устройств, или их комбинацию, таких как статическое оперативное запоминающее устройство (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (EEPPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитное запоминающее устройство, запоминающее устройство флэш, магнитный или оптический диск.
Компонент 706 питания обеспечивает питание для различных компонентов устройства 700. Компонент 706 питания может включать в себя систему управления питанием, один или больше источников питания и любые другие компоненты, ассоциированные с генерированием, управлением и распределением питания для устройства 700.
Мультимедийный компонент 708 включает в себя экран, предоставляющий выходной интерфейс между устройством 700 и пользователем. В некоторых вариантах осуществления экран может включать в себя жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, экран может быть воплощен, как сенсорный экран для приема входных сигналов от пользователя. Сенсорная панель включает в себя один или более датчиков прикосновения для определения прикосновений, перемещений и жестов на сенсорной панели. Датчики прикосновения могут не только определять границу прикосновения или действия перемещения, но также могут определять период времени и давление, ассоциированные с прикосновением или действием перемещения. В некоторых вариантах осуществления мультимедийный компонент 708 включает в себя переднюю камеру и/или заднюю камеру. Передняя камера и задняя камера могут принимав внешние мультимедийный данные, в то время как устройство 700 находится в рабочем режиме, таком как режим фотографирования или видеорежим. Каждая из передней камеры и задней камеры может представлять собой систему с фиксированным оптическим объективом или иметь возможность оптического фокусирования и изменения масштаба изображения.
Аудио компонент 710 выполнен с возможностью вывода и/или ввода аудиосигналов. Например, аудио компонент 710 включает в себя микрофон ("MIC"), выполненный с возможностью принимать внешний аудиосигнал, когда устройство 700 находится в режиме работы, таком как режим вызова, режим записи и режим распознавания голоса. Принимаемый аудиосигнал может быть дополнительно сохранен в запоминающем устройстве 704 или может быть передан через компонент 716 обмена данными. В некоторых вариантах осуществления аудио компонент 710 дополнительно включает в себя громкоговоритель для вывода аудиосигналов.
Интерфейс 712 I/O обеспечивает интерфейс между компонентом 702 обработки и периферийными модулями интерфейса, периферийные модули интерфейса, представляют собой, например, клавиатуру, круговой переключатель, кнопки и т.п. Кнопки могут включать в себя, но не ограничены этим, кнопку возвращения к исходной странице, кнопку громкости, кнопку запуска и кнопку фиксации.
Компонент 714 датчика включает в себя один или более датчиков для обеспечения оценок состояния различных аспектов устройства 700. Например, компонент 714 датчика может обнаруживать открытое/закрытое состояние устройства 700, относительное положение компонентов (например, дисплея и клавиатуры устройства 700), изменение положения устройства 700 или компонента устройства 700, присутствие или отсутствие контакта пользователя с устройством 700, ориентацию или ускорение/замедление устройства 700, и изменение температуры устройства 700. Компонент 714 датчика может включать в себя бесконтактный датчик, выполненный с возможностью обнаружения присутствия рядом объекта, без какого-либо физического контакта. Компонент 714 датчика также может включать в себя датчик света, такой как датчик изображения CMOS или CCD, предназначенный для использования в приложениях формирования изображения. В некоторых вариантах осуществления компонент 714 датчика может также включать в себя датчик акселерометра, гироскопический датчик, магнитный дчатчик, датчик давления или датчик температуры.
Компонент 716 связи выполнен с возможностью обеспечения связи по проводам или по беспроводному каналу, между устройством 700 и другими устройствами. Устройство 700 может получать доступ к беспроводной сети на основе стандарта связи, такого как WiFi, 2G или 3G, или используя их комбинацию. В примерном варианте осуществления компонент 716 связи принимает сигнал широковещательной передачи или информацию, ассоциированную с широковещательной передачей, из внешней системы управления широковещательной передачей, через канал широковещательной передачи. В примерном варианте осуществления компонент 716 связи дополнительно включает в себя модуль связи в ближнем поле (NFC), который обеспечивает связь на коротком расстоянии. Например, модуль NFC может быть воплощен на основе технологии радиочастотной идентификации (RFID), технологии ассоциации посредством передачи данных в инфракрасном диапазоне (IrDA), технологии ультраширокой полосы (UWB), технологии Bluetooth (ВТ) и других технологий.
В примерных вариантах осуществления устройство 700 может быть воплощено в виде одной или больше специализированных интегральных микросхем (ASIC), цифровых сигнальных процессоров (DSP), цифровых сигнальных устройств обработки (DSPD), программируемых логических устройств (PLD), программируемой пользователем вентильной матрицы (FPGA), контроллеров, микроконтроллеров, микропроцессоров или другими электронными компонентами для выполнения описанных выше способов выделения характеристики.
В примерных вариантах осуществления также предусмотрен энергонезависимый считываемый компьютером носитель информации, включающий в себя инструкции, такие как включены в запоминающем устройстве 704, выполняемые процессором 718 в устройстве 700 для выполнения описанных выше способов выделения характеристики. Например, энергонезависимый считываемый компьютером носитель информации может представлять собой ROM, RAM, CD-ROM, магнитную ленту, гибкий диск, оптическое устройство накопитель и т.п.
Другие варианты осуществления изобретения будут понятны для специалистов в данной области техники при рассмотрении описания и при выполнении на практике представленных здесь раскрытий. Данная заявка предназначена для охвата любых вариаций, вариантов использования или адаптации раскрытия в соответствии с его общими принципами и включающих в себя такие выходы за пределы настоящего раскрытия, которые попадают в пределы известной или обычной практики в данной области техники. Предполагается, что спецификации и примеры будут рассматриваться, только как примерные, а истинный объем и сущность изобретения будут обозначены следующей формулой изобретения.
Следует понимать, что изобретательная концепция не ограничена точной конструкцией, которая была описана выше и иллюстрируется на приложенных чертежах, и что различные модификации и изменения могут быть выполнены без выхода за пределы его объема. Предполагается, что объем изобретения ограничен только приложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫДЕЛЕНИЯ ПРИЗНАКОВ | 2015 |
|
RU2644516C2 |
| СПОСОБ И УСТРОЙСТВО ВЫДЕЛЕНИЯ ХАРАКТЕРИСТИКИ | 2015 |
|
RU2632578C2 |
| Система и способ обработки данных и распознавания объектов в режиме реального времени | 2022 |
|
RU2802280C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОТСЛЕЖИВАНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ДЕСКРИПТОРОВ, ИНВАРИАНТНЫХ ОТНОСИТЕЛЬНО ВРАЩЕНИЯ | 2010 |
|
RU2542946C2 |
| Способ нахождения соответствия особых точек цифровых изображений | 2015 |
|
RU2614494C2 |
| Идентификация или определение груза на основе текстуры | 2015 |
|
RU2717913C2 |
| УСТРОЙСТВО ПОИСКА ДУБЛИКАТОВ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2538319C1 |
| СПОСОБ И СИСТЕМА РАСПОЗНАВАНИЯ ЭМОЦИОНАЛЬНОГО СОСТОЯНИЯ СОТРУДНИКОВ | 2021 |
|
RU2768545C1 |
| УСТРОЙСТВО И СПОСОБ ПЕРСОНАЛИЗИРОВАННОГО ПОИСКА НА ОСНОВЕ ПРИЗНАКОВ ИЗОБРАЖЕНИЯ ПРОДУКТА | 2016 |
|
RU2697739C2 |
| СИСТЕМА ОБРАБОТКИ ИЗОБРАЖЕНИЙ И СПОСОБ УСТРАНЕНИЯ РАСТРОВОЙ СТРУКТУРЫ ИЗОБРАЖЕНИЯ ЧЕРЕЗ РАЗРЕЖЕННОЕ ПРЕДСТАВЛЕНИЕ СКАНИРОВАННЫХ ПЕЧАТНЫХ КОПИЙ | 2014 |
|
RU2595635C2 |
Изобретение относится к вычислительной технике. Технический результат заключается в улучшении точности обнаружения изображения при распознавании структур. Способ выделения характеристики изображения, в котором разделяют изображение на множество блоков, причем каждый блок содержит множество ячеек; выполняют разреженное разложение сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке; и выделяют характеристики гистограммы ориентированного градиента (HOG) изображения в области частот в соответствии с разреженными векторами. 3 н. и 10 з.п. ф-лы, 12 ил., 1 табл.
1. Способ выделения характеристики изображения, содержащий этапы, на которых:
разделяют изображение на множество блоков, причем каждый блок содержит множество ячеек;
выполняют разреженное разложение сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке; и
выделяют характеристики гистограммы ориентированного градиента (HOG) изображения в области частот в соответствии с разреженными векторами.
2. Способ по п. 1, в котором этап выполнения разреженного разложения сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке, содержит подэтапы, на которых:
корректируют пиксели в каждой ячейке так, чтобы они составляли n*1-мерный вектор; и
выполняют разреженное разложение сигнала для вектора в каждой ячейке с использованием следующей формулы для получения соответствующих разреженных векторов:
min(x) ||x||1 при условии y=Dx;
в которой у представляет собой вектор каждой ячейки, D представляет собой заданный перезаполненный словарь, х представляет собой разреженный вектор, выделенный посредством выполнения разреженного разложения сигнала для у, в соответствии с перезаполненным словарем D, и ||x||1 представляет собой сумму абсолютного значения каждого столбца разреженного вектора х, причем каждый разреженный вектор представляет собой m*1-мерный вектор, а перезаполненный словарь D представляет собой матрицу n*m.
3. Способ по п. 1, в котором этап выделения характеристики гистограммы ориентированного градиента (HOG) изображения в соответствии с разреженными векторами содержит подэтапы, на которых:
вычисляют магнитуду градиента и направления градиента каждой ячейки, в соответствии с разреженным вектором, выделения дескриптора каждой ячейки;
выделяют характеристику HOG каждого блока на основе статистических данных соответствующих дескрипторов каждого блока; и
выделяют характеристику HOG изображения на основе статистических данных характеристики HOG соответствующих блоков изображения.
4. Способ по п. 3, в котором этап выделения характеристики HOG изображения на основе статистических данных характеристики HOG соответствующих блоков изображения содержит подэтап, на котором:
каскадируют характеристику HOG соответствующих блоков изображения так, чтобы составить матрицу для получения характеристики HOG изображения, причем каждый столбец матрицы представляет собой характеристику HOG блока.
5. Способ по п. 3, в котором этап выделения характеристики HOG изображения на основе статистических данных характеристики HOG соответствующих блоков изображения, содержит подэтапы, на которых:
корректируют характеристику HOG каждого блока изображения из исходного L*1-мерного вектора до M*N матрицы, причем каждый блок содержит M*N пикселей, и L=M*N;
выделяют характеристику HOG изображения, в соответствии со скорректированной характеристикой HOG каждого блока в соответствующее положение каждого блока в изображении.
6. Способ по любому из пп. 1-5, дополнительно содержащий этап, на котором: нормализуют изображение для получения изображения с заданным размером.
7. Устройство выделения характеристики изображения, содержащее:
модуль разделения, выполненный с возможностью разделения изображения на множество блоков, при этом каждый блок содержит множество ячеек;
модуль разложения, выполненный с возможностью выполнения разреженного разложения сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке; и
модуль выделения, выполненный с возможностью выделения характеристики гистограммы ориентированного градиента (HOG) изображения в области частот, в соответствии с разреженными векторами.
8. Устройство по п. 7, в котором модуль разложения содержит:
первый подмодуль коррекции, выполненный с возможностью корректировки пикселей в каждой ячейке так, чтобы они составляли n*1-мерный вектор; и
подмодуль разложения сигнала, выполненный с возможностью выполнения разреженного разложения сигнала для векторов в каждой ячейке, используя следующую формулу, для получения соответствующего разреженного вектора:
min(x) ||x||1 при условии y=Dx;
в которой у представляет собой вектор в каждой ячейке, D представляет собой заданный перезаполненный словарь, х представляет собой разреженный вектор, выделенный путем выполнения разреженного разложения сигнала для у, в соответствии с перезаполненным словарем D, и ||x||1 представляет собой суммирование абсолютного значения каждого столбца разреженного вектора х, при этом каждый разреженный вектор представляет собой m*1-мерный вектор и перезаполненный словарь D представляет собой матрицу n*m.
9. Устройство по п. 7, в котором модуль выделения содержит:
подмодуль вычисления, выполненный с возможностью вычисления амплитуды градиента и направления градиента каждой ячейки в соответствии с разреженным вектором выделения дескриптора каждой ячейки;
первый статистический подмодуль, выполненный с возможностью получения характеристики HOG каждого блока на основе статистических данных соответствующих дескрипторов каждого блока; и
второй статистический подмодуль, выполненный с возможностью получения характеристики HOG изображения на основе статистических данных характеристики HOG соответствующих блоков изображения.
10. Устройство по п. 9, в котором второй статистический подмодуль выполнен с возможностью:
каскадирования характеристики HOG соответствующих блоков изображения для формирования матрицы, для получения характеристики HOG изображения, в котором каждый столбец матрицы представляет собой характеристику HOG блока.
11. Устройство по п. 9, в котором второй статистический подмодуль содержит:
второй подмодуль коррекции, выполненный с возможностью корректировки характеристики HOG каждого блока в изображении от исходного L*1-мерного вектора до матрицы M*N, причем каждый блок содержит M*N пикселей, и L=M*N; и
подмодуль выделения характеристики, выполненный с возможностью выделения характеристики HOG изображения, в соответствии со скорректированной характеристикой HOG каждого блока и соответствующего положения каждого блока в изображении.
12. Устройство по любому из пп. 7-11, дополнительно содержащее:
модуль обработки, выполненный с возможностью нормализации изображения для получения изображения с заданным размером.
13. Устройство выделения характеристики изображения, содержащее:
процессор;
запоминающее устройство для хранения инструкций, выполняемых процессором; при этом
процессор выполнен с возможностью:
разделения изображения на множество блоков, причем каждый блок содержит множество ячеек;
выполнения разреженного разложения сигнала для каждой ячейки для получения разреженного вектора, соответствующего каждой ячейке; и
выделения характеристики гистограммы ориентированного градиента (HOG) изображения в области частот в соответствии с разреженными векторами.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| W | |||
| YANG et al | |||
| "Kernel Latent SVM for Visual Recognition", опубл | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОТСЛЕЖИВАНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ДЕСКРИПТОРОВ, ИНВАРИАНТНЫХ ОТНОСИТЕЛЬНО ВРАЩЕНИЯ | 2010 |
|
RU2542946C2 |

