[001] По настоящей заявке испрашивается приоритет на основании патентной заявки Китая № 201510829071.7, поданной 25 ноября 2015 г., все содержание которой включено в настоящий документ посредством ссылки.
Область техники, к которой относится изобретение
[002] Настоящее раскрытие в общем смысле относится к технической области обработки изображений, а точнее - к способу и устройству для выделения признаков.
Уровень техники
[003] Идентификация и распознавание изображений является важной областью исследования в машинном распознавании образов. Самый распространенный способ идентификации и распознавания изображений является выделение какого-либо признака изображения для идентификации и распознавания изображения.
[004] В данной области изображение идентифицируется и распознается путем выделения признака Гистограммы ориентированных градиентов изображения. Способ выделения признака Гистограммы ориентированных градиентов состоит в следующем: расчет градиента каждого пикселя изображения; разделение изображения на множество ячеек, где каждая ячейка состоит из множества пикселей, и каждые n смежных ячеек составляют блок; подсчет статистики Гистограммы ориентированных градиентов всех пикселей в каждой ячейке и определение признака Гистограммы ориентированных градиентов каждого блока в соответствии с гистограммой градиента всех клеток каждого блока; и получение статистики признака Гистограммы ориентированных градиентов изображения для получения признака Гистограммы ориентированных градиентов изображения.
Раскрытие изобретения
[005] С учетом данного факта в данной области в данном раскрытии описываются способ и устройство для выделения признаков. Далее раскрываются технические решения:
[006] В соответствии с первым аспектом настоящего изобретения описывается способ выделения признаков, включая: разделение изображения на множество блоков, где каждый блок состоит из множества ячеек; разложение разреженного сигнала каждой ячейки с использованием предопределенного словаря D для получения разреженного вектора для каждой из ячеек соответственно, где предопределенный словарь D - это словарь, определенный путем применения итерационного алгоритма к опытному изображению; и выделение признака Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами.
[007] В альтернативном варианте осуществления изобретения данный способ может также включать в себя: получение опытного изображения, где опытное изображение включает совокупность категорий множеств образов; выполнение итераций для получения оптимального словаря, такого как предопределенный словарь D с использованием следующей формулы:

где R= [r1, r2, …, rC] обозначает разреженную матрицу коэффициентов C опытных изображений, Y обозначает все категории опытных изображений, 

[008] В альтернативном варианте осуществления изобретения данный способ может также включать в себя: разложение разреженного сигнала каждой ячейки с использованием предустановленного словаря D для получения разреженного вектора для каждой ячейки соответственно, включая: установку пикселей в каждой ячейке n*1-мерному вектору; и выполнение, с учетом предустановленного словаря D, разложения разреженного сигнала на векторе в каждой ячейке для получения соответствующего разреженного вектора с использованием следующей формулы:

где y означает вектор в каждой ячейке, x означает разреженный вектор, полученный путем разреженной обработки y с использованием предустановленного словаря D, 
[009] В альтернативном варианте осуществления изобретения выделение Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами может включать: расчет, в соответствии с разреженным вектором, величины и направления градиента каждой ячейки для получения признака каждой ячейки; расчет статистики соответствующих признаков в каждом блоке для получения Гистограммы ориентированных градиентов каждого блока; и получение статистики признака Гистограммы ориентированных градиентов каждого блока для получения Гистограммы ориентированных градиентов изображения.
[0010] В альтернативном варианте осуществления изобретения получение статистических данных Гистограммы ориентированных градиентов каждого блока изображения может включать: каскадирование гистограммы ориентированного градиента каждого блока каждого блока на изображении в матрицу для получения Гистограммы ориентированных градиентов изображения, где каждый столбец матрицы представляет собой признак Гистограммы ориентированных градиентов одного из блоков.
[0011] В альтернативном варианте осуществления изобретения получение статистических данных Гистограммы ориентированных градиентов каждого блока изображения для получения признака Гистограммы ориентированных градиентов изображения может включать: установка Гистограммы ориентированных градиентов каждого блока изображения с первоначального L*1-мерного вектора в матрицу M*N, где каждый блок состоит из пикселей M*N, а L=M*N; и получение Гистограммы ориентированных градиентов изображения в соответствии с установленными Гистограммами ориентированных градиентов каждого блока и соответствующим положением каждого блока на изображении.
[0012] В альтернативном варианте осуществления изобретения данный способ может также включать: нормализацию изображения для получения изображения предустановленного размера.
[0013] В соответствии со вторым аспектом настоящего изобретения описывается устройство для выделения признаков, включающий: разделительный модуль для разделения изображения на множество блоков, где каждый блок состоит из множества ячеек; модуль разложения для разложения разреженного сигнала каждой ячейки с использованием предустановленного словаря D для получения разреженного вектора для каждой из ячеек соответственно, где предустановленный словарь D представляет собой словарь, определенный путем применения итерационного алгоритма к опытному изображению; и выделительный модуль для выделения признака Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами.
[0014] В альтернативном варианте осуществления изобретения устройство может также включать в себя: модуль для получения опытного изображения, где опытное изображение включает совокупность категорий множеств образов; и итерационный модуль для осуществления итерации для получения оптимального словаря в качестве предустановленного словаря D с использованием следующей формулы:

где R= [r1, r2, …, rC] обозначает разреженную матрицу коэффициентов C опытных изображений, Y обозначает все категории опытных изображений,
[0015] В альтернативном варианте осуществления изобретения модуль разложения может включать в себя: первый установочный подмодуль для установки пикселей в каждой ячейке по n*1-мерному вектору; и подмодулем разложения сигнала для разложения разреженного сигнала с использованием предустановленного словаря D на векторе в каждой ячейке для получения соответствующего разреженного вектора с использованием следующей формулы:

где y означает вектор в каждой ячейке, x означает разреженный вектор, полученный путем разреженной обработки y с использованием предустановленного словаря D,
[0016] В альтернативном варианте осуществления изобретения выделительный модуль может включать в себя: расчетный подмодуль для расчета, в соответствии с разреженным вектором, соответствующих величины и направления градиента каждой ячейки для получения дескриптора каждой ячейки; первого статистического подмодуля для получения статистических данных по соответствующим дескрипторам в каждом блоке для получения признака Гистограммы ориентированных градиентов каждого блока; и второго статистического подмодуля для получения статистических данных признака Гистограммы ориентированных градиентов каждого блока изображения для получения признака Гистограммы ориентированных градиентов изображения.
[0017] В альтернативном варианте осуществления изобретения второй статистический подмодуль может быть настроен для каскадирования признака Гистограммы ориентированных градиентов каждого блока изображения в матрицу для получения признака Гистограммы ориентированных градиентов изображения, где каждый столбец матрицы представляет собой признак Гистограммы ориентированных градиентов одного из блоков.
[0018] В альтернативном варианте осуществления изобретения второй статистический подмодуль может включать: второй установочный подмодуль, настроенный на установку Гистограммы ориентированных градиентов каждого блока изображения с первоначального L*1-мерного вектора к матрице M*N, где каждый блок состоит из пикселей M*N, а L=M*N; и модуля выделения признака, настроенного на получение признака Гистограммы ориентированных градиентов изображения в соответствии с выравненными признаками Гистограммы ориентированных градиентов каждого блока и соответствующим положением каждого блока на изображении.
[0019] В альтернативном варианте осуществления изобретения устройство может также включать: обрабатывающий модуль для нормализации изображения для получения изображения предустановленного размера.
[0020] В соответствии с третьим аспектом настоящего изобретения описывается устройство для выделения признаков, включающий: процессор и память для хранения команд, выполняемых процессором; где процессор настроен для разделения изображения на множество блоков, где каждый из блоков состоит из множества ячеек; разложения разреженного сигнала в каждой ячейке с использованием предустановленного словаря D для получения разреженного вектора, для каждой ячейки соответственно, где предустановленный словарь D представляет собой словарь, определенный с использованием итерационного алгоритма по отношению к опытному изображению; и выделения признака Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами.
[0021] В соответствии с техническими решениями вариантов осуществления изобретения могут быть достигнуты, по крайней мере, некоторые из следующих технических результатов.
[0022] Путем разделения изображения на множество блоков, где каждый из блоков состоит из множества ячеек; разложения разреженного сигнала каждой ячейки с использованием предустановленного словаря D для получения разреженного вектора для каждой из ячеек соответственно, где предопределенный словарь D представляет собой словарь, определенный путем применения итерационного алгоритма к опытному изображению; и выделения признака Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами может быть решена следующая задача: процесс выделения признака Гистограммы ориентированных градиентов рассчитывается непосредственно с учетом пространственной области изображения, относительно снижающей скорость обнаружения и точность в распознавании изображений. Скорость обнаружения и точность могут быть повышены при распознавании изображений путем выделения признака Гистограммы ориентированных градиентов изображения в частотном интервале.
[0023] Следует понимать, что как предшествующее общее раскрытие, так и нижеследующее подробное раскрытие являются лишь примерами, служат лишь для пояснения и не ограничивают настоящее изобретение.
Краткое описание чертежей
[0024] Прилагаемые чертежи, являющиеся частью данной спецификации, иллюстрируют варианты осуществления, соответствующие настоящему изобретению, и, вместе с описаниями, служат для объяснения принципов изобретения.
[0025] ФИГ. 1 представляет собой функциональную схему, иллюстрирующую способ для выделения признаков в соответствии с примерным вариантом осуществления изобретения.
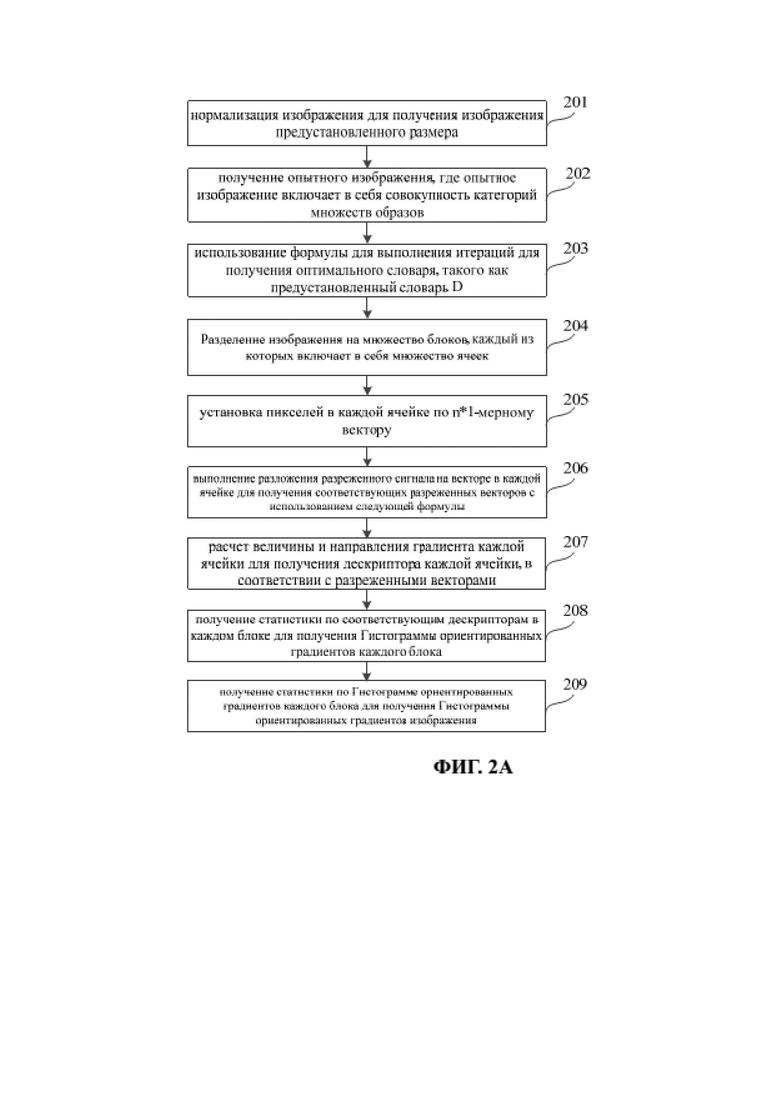
[0026] ФИГ. 2A представляет собой функциональную схему, иллюстрирующую способ выделения признаков в соответствии с иным примерным вариантом осуществления изобретения.
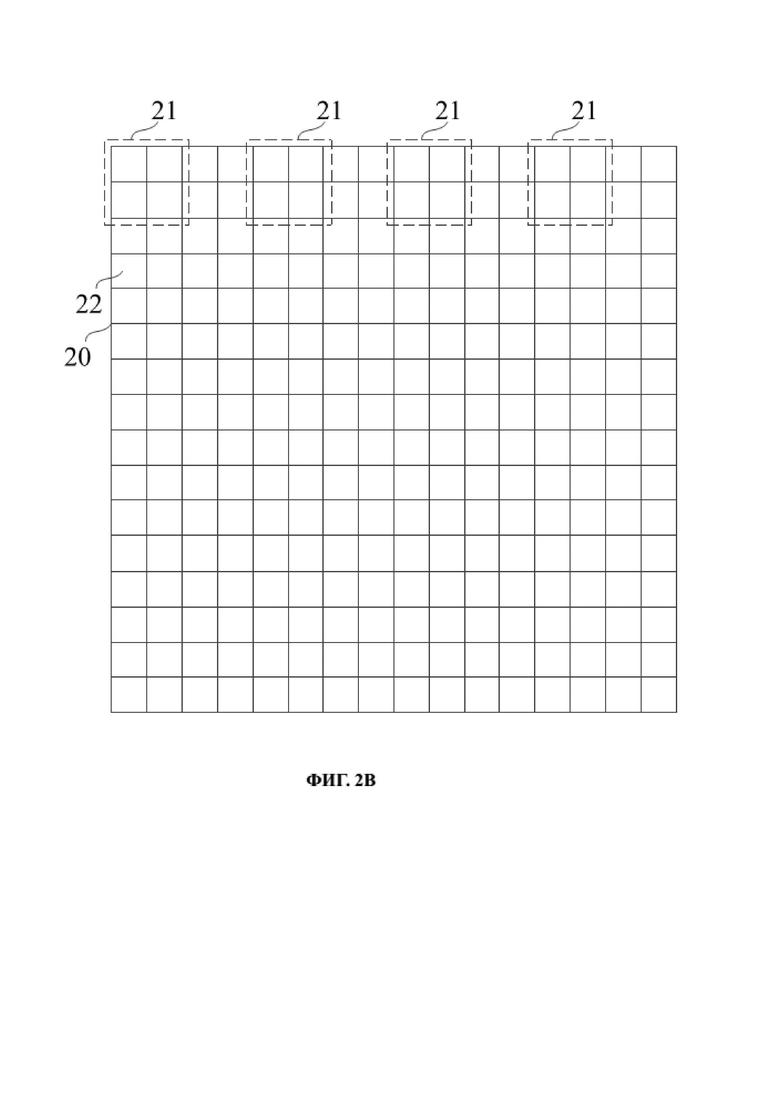
[0027] ФИГ. 2B представляет схему, изображающую разделение изображения в соответствии с примерным вариантом осуществления изобретения.
[0028] ФИГ. 2C представляет схему, изображающую разделение изображения в соответствии с другим примерным вариантом осуществления изобретения.
[0029] ФИГ. 2D представляет схему, изображающую установку пикселей ячейки в соответствии с примерным вариантом осуществления изобретения.
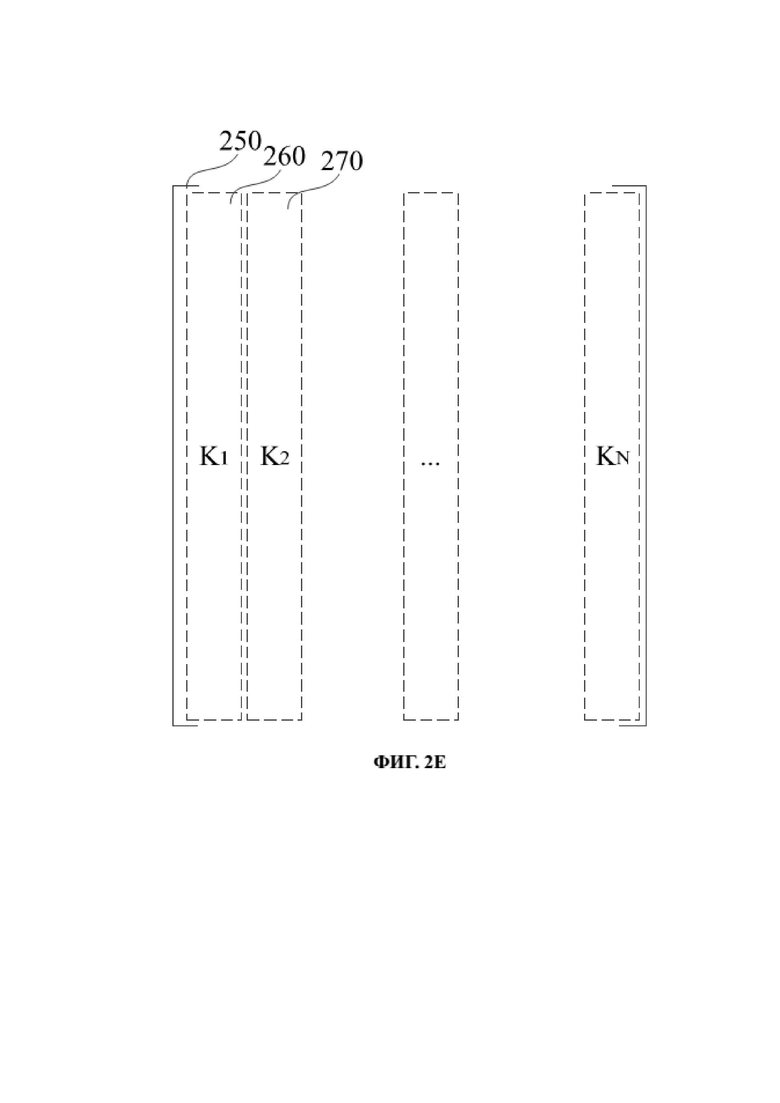
[0030] ФИГ. 2E представляет схему, изображающую статистические данные признака Гистограммы ориентированных градиентов в блоке в соответствии с примерным вариантом осуществления изобретения.
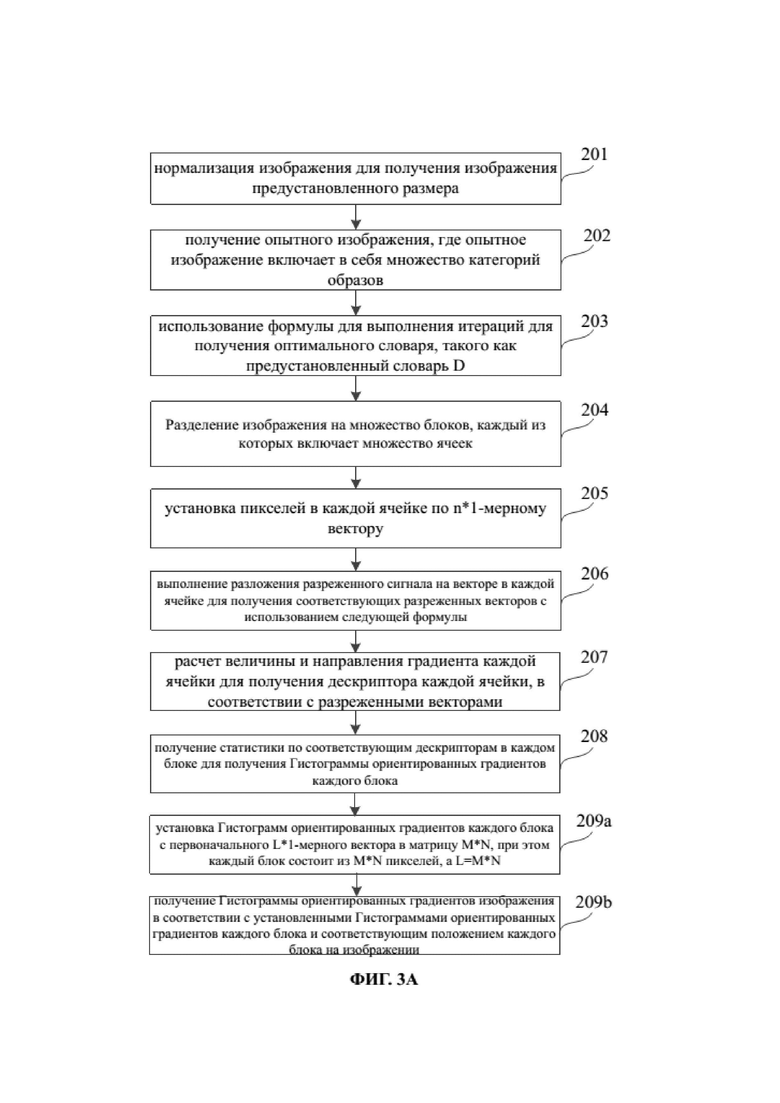
[0031] ФИГ. 3А представляет собой функциональную схему, иллюстрирующую способ для выделения признаков в соответствии с примерным вариантом осуществления изобретения.
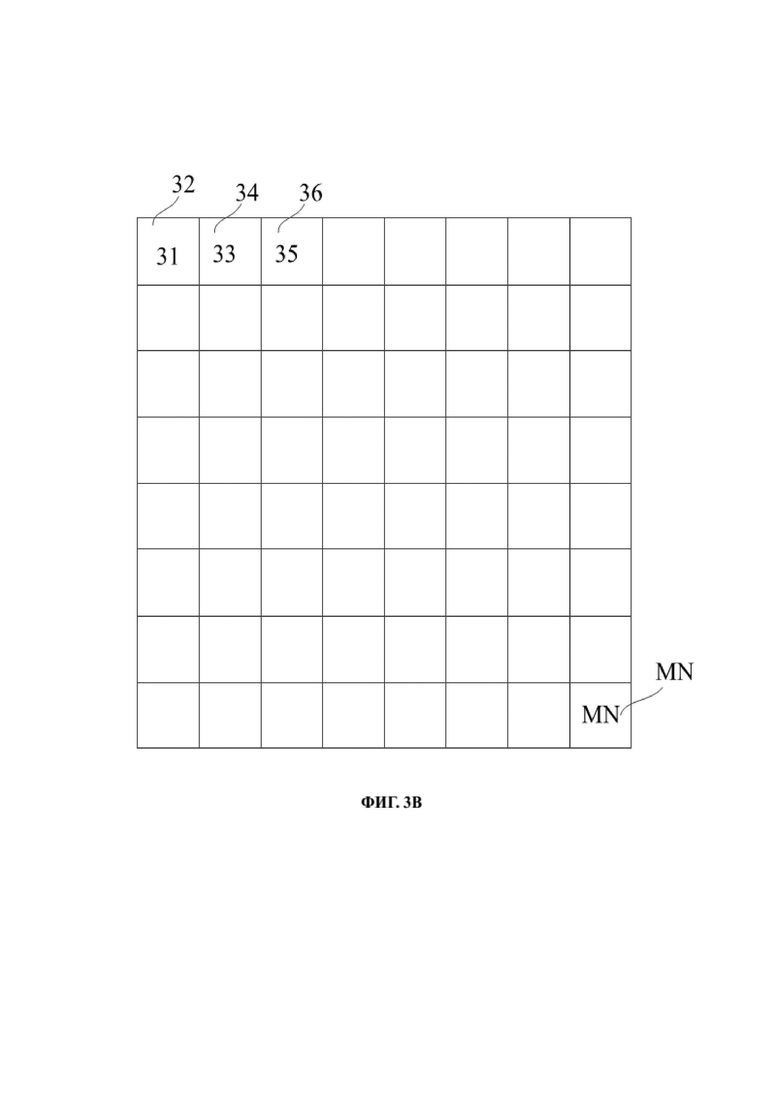
[0032] ФИГ. 3B представляет схему, изображающую статистические данные признака Гистограммы ориентированных градиентов изображения в соответствии с примерным вариантом осуществления изобретения.
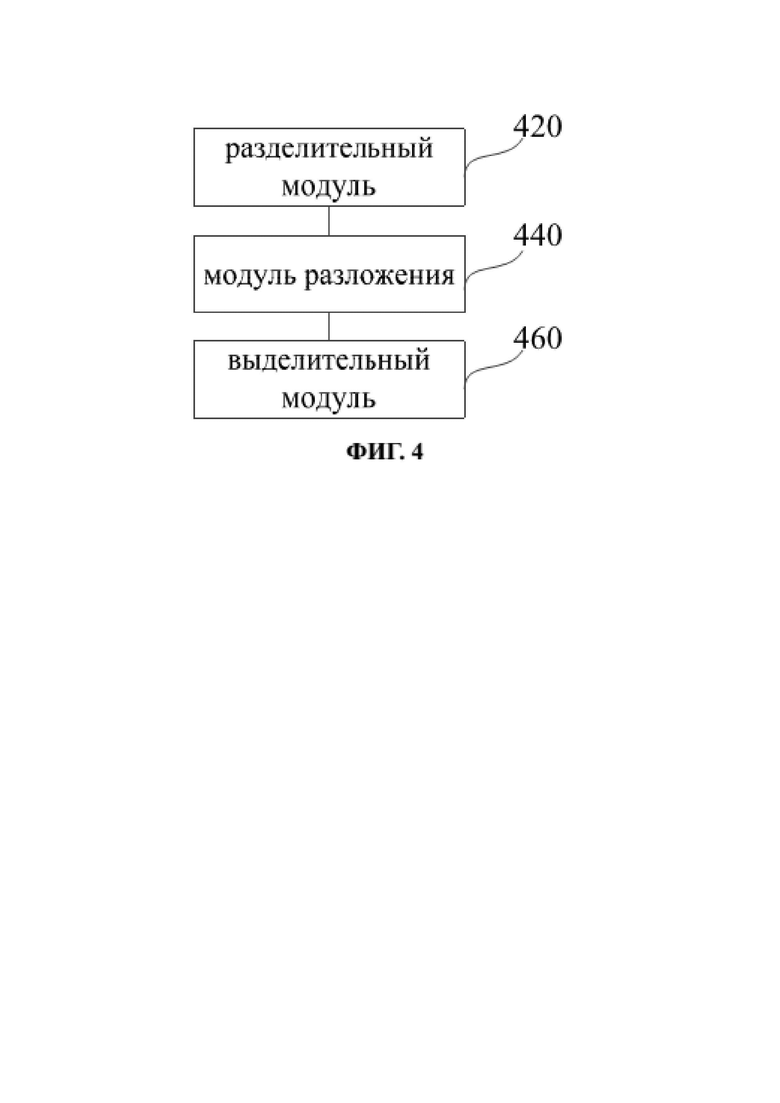
[0033] ФИГ. 4 представляет собой блок-схему, иллюстрирующую устройство для выделения признаков в соответствии с примерным вариантом осуществления изобретения.
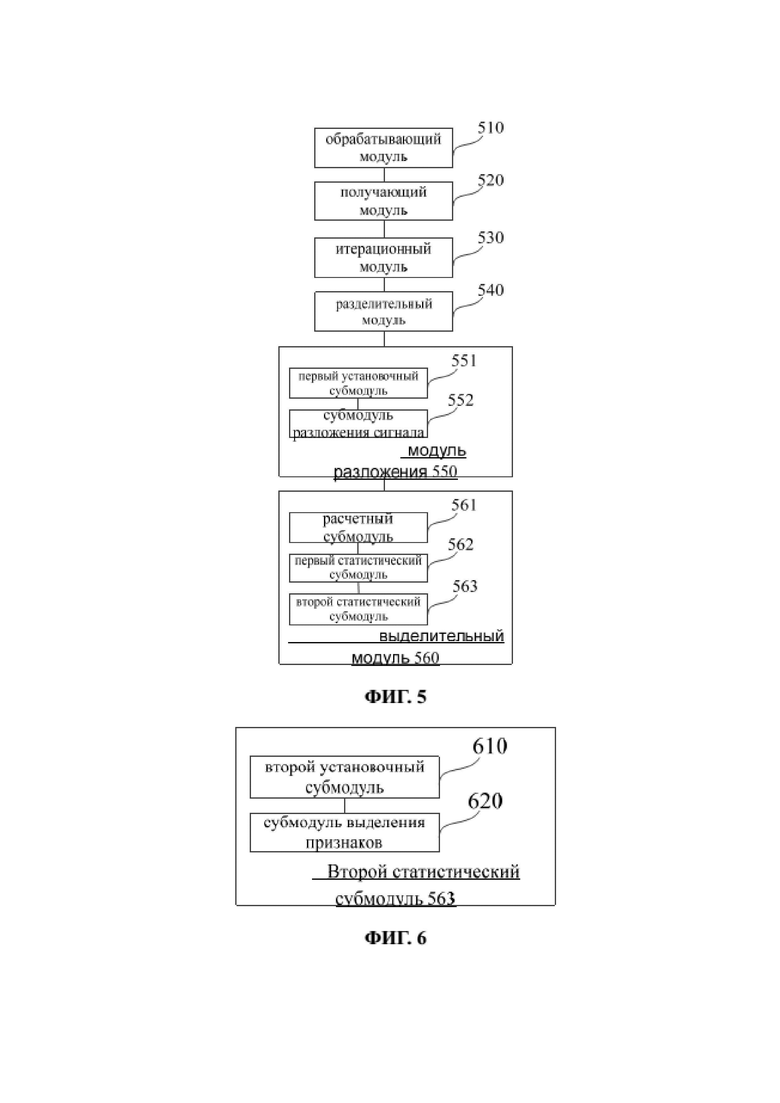
[0034] ФИГ. 5 представляет собой блок-схему, иллюстрирующую устройство для выделения признаков в соответствии с другим примерным вариантом осуществления изобретения.
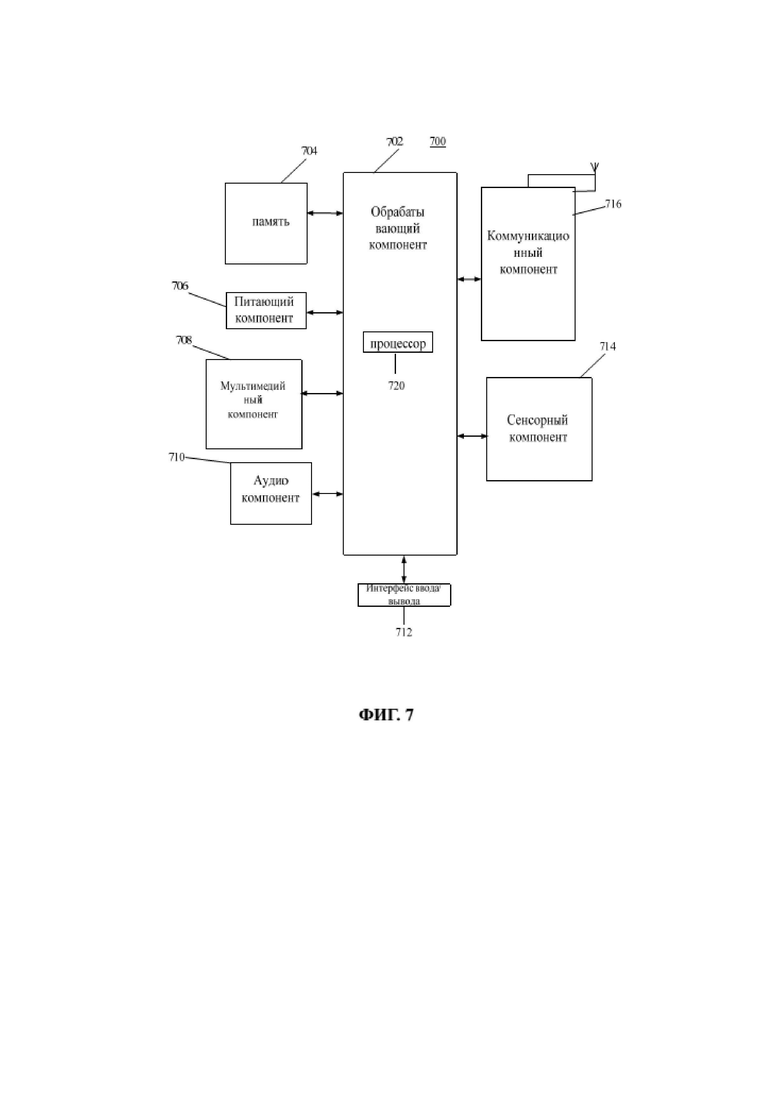
[0035] ФИГ. 6 представляет собой блок-схему, иллюстрирующую подмодули устройства для выделения признаков в соответствии с примерным вариантом осуществления изобретения.
[0036] ФИГ. 7 представляет собой блок-схему, иллюстрирующую устройство для выделения признаков в соответствии с другим примерным вариантом осуществления изобретения.
Раскрытие изобретения
[0037] Далее в подробностях будут рассмотрены примерные варианты осуществления изобретения, иллюстрируемые сопровождающими чертежами. Дальнейшее описание относится к сопровождающим чертежам, в которых одинаковые номера на разных чертежах обозначают одинаковые или подобные элементы, если не указано иное. Варианты осуществления, рассмотренные в нижеследующем описании примерных вариантов осуществления изобретения, не представляют собой все возможные варианты осуществления, соответствующие настоящему изобретению. Напротив, они представляют собой лишь примеры устройств и способов, соответствующих аспектам, относящимся к настоящему изобретению согласно прилагаемой формуле изобретения.
[0038] ФИГ. 1 представляет собой функциональную схему, иллюстрирующую способ для выделения признаков в соответствии с примерным вариантом осуществления изобретения. Как показано на ФИГ. 1, вариант осуществления изобретения использует способ, реализуемый с помощью аппаратных средств, для распознавания изображений в качестве примера, при этом данный способ может включать в себя следующие шаги.
[0039] На шаге 102 изображение разделяется на множество блоков, в котором каждый из блоков состоит из множества ячеек.
[0040] На шаге 104 производится разложение разреженного сигнала в отношении каждой ячейки с использованием предустановленного словаря D для получения разреженного вектора для каждой из ячеек соответственно.
[0041] Предустановленный словарь представляет собой словарь, определенный путем применения итерационного алгоритма к опытному изображению.
[0042] Разложение разреженного сигнала относится к конвертации данного наблюдаемого сигнала в разреженный вектор в соответствии с предустановленным словарем D, где множество элементов разреженного вектора нулевое.
[0043] В варианте осуществления изобретения пиксели в каждой ячейке берутся как данный наблюдаемый сигнал, конвертируемый в соответствующий разреженный вектор, в соответствии с предустановленным словарем D, а затем соответственно получается разреженный вектор, соответствующий каждой из ячеек.
[0044] На шаге 106 признак Гистограммы ориентированных градиентов изображения выделяется в соответствии с разреженным вектором.
[0045] признак Гистограммы ориентированных градиентов изображения выделен в соответствии с разреженным вектором, полученным в результате разложения разреженного сигнала.
[0046] Таким образом, путем разделения изображения на множество блоков, где каждый из блоков состоит из множества ячеек; разложения разреженного сигнала каждой ячейки с использованием предустановленного словаря D для получения разреженного вектор для каждой из ячеек соответственно, где предопределенный словарь D представляет собой словарь, определенный путем применения итерационного алгоритма к опытному изображению; и выделения Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами, использование способа, описанного в варианте осуществления изобретения может решить проблему, связанную с тем, что скорость обнаружения и точность относительно низки при распознавании изображений в силу того, что процесс выделения Гистограммы ориентированных градиентов рассчитывается непосредственно с учетом пространственной области изображения. Благодаря использованию данного способа скорость обнаружения и точность могут быть повышены при распознавании изображений путем выделения признака Гистограммы ориентированных градиентов изображения в частотном интервале.
[0047] ФИГ. 2A представляет собой функциональную схему, иллюстрирующую способ выделения признаков в соответствии с иным примерным вариантом осуществления изобретения. Как показано на ФИГ. 2A, вариант осуществления изобретения использует способ, реализуемый с помощью аппаратных средств, для распознавания изображений в качестве примера, при этом данный способ может включать в себя следующие шаги.
[0048] На шаге 201 изображение нормализуется для получения предустановленного размера.
[0049] Распознавание изображений обычно включает в себя выделение признаков множества изображений. Перед выделением признаков изображений терминал может осуществить нормализацию изображений для трансформации изображений разных размеров в изображения предустановленного размера для осуществления унифицированной обработки опытных образцов.
[0050] На шаге 202 получается опытное изображение, где опытное изображение включает в себя совокупность категорий множеств образов.
[0051] Терминал может получить опытное изображение из библиотеки опытных изображений, где опытные изображения включают в себя совокупность категорий настроек изображений, таких как распознавание лиц, тел или транспортных средств, и не дополняются в настоящем изобретении.
[0052] В качестве альтернативы, после получения опытных изображений терминал может осуществить их нормализацию для трансформации изображений разных размеров в изображения предустановленного размера для осуществления унифицированной обработки опытных образцов.
[0053] На шаге 203 может быть получен оптимальный словарь, принятый как предустановленный словарь D, путем итерационного использования следующей формулы:
где R= [r1, r2, …, rC] обозначает разреженную матрицу коэффициентов C опытных изображений, Y обозначает все категории опытных изображений,
[0054] Алгоритм K-SVD может обеспечить получение словарем информации в опытных изображениях посредством итерационного процесса, использующего разреженные коэффициенты обозначения для обновления элементов словаря. Посредством непрерывной итерации в итоге получается набор элементов словаря, которые могут отражать признаки изображения, а именно предустановленный словарь D, где элементы относятся к элементам словаря. То есть окончательный предустановленный словарь представляет собой оптимальный словарь, полученный путем получения информации опытными изображениями.
[0055] Итерационный процесс алгоритмов K-SVD следующий: предполагая, что имеется X категорий опытных изображений, для i-й категории даны Ni опытных изображений. Все опытные изображения i-й категории представлены матрицей 

[0056] На шаге 204 изображение разделяется на множество блоков, в котором каждый из блоков состоит из множества ячеек.
[0057] В качестве альтернативы, разделение нормализованного изображения терминалом может происходить так: разделение изображения на множество блоков, а затем - разделение каждого из блоков на множество ячеек.
[0058] В качестве альтернативы, разделение нормализованного изображения терминалом может происходить так: разделение изображения на множество ячеек, а затем - объединение смежных ячеек в блоки, состоящие из множества ячеек. Например, блок может состоять из четырех смежных парных ячеек, объединенных в форме китайского иероглифа “ ”.
”.
[0059] В варианте осуществления изобретения, в процессе разделения изображения, разделение на блоки может производиться перед разделением на ячейки, и наоборот. Порядок выполнения не имеет конкретных ограничений.
[0060] Например, изображение 20 размером 128 пикселей*128 пикселей может быть сначала разделено на непересекающиеся блоки 21 размером 16 пикселей*16 пикселей, затем каждый из блоков 21 размером 16 пикселей*16 пикселей разделяется на ячейки 22 размером 8 пикселей*8 пикселей, таким образом, изображение включает 8*8=64 непересекающихся блоков 21, а каждый из блоков состоит из 2*2=4 ячеек, как показано на ФИГ. 2B.
[0061] Например, изображение 20 размером 128 пикселей*128 пикселей сначала разделяется на пересекающиеся блоки 23 размером 16 пикселей*16 пикселей, а затем каждый из блоков 23 размером 16 пикселей*16 пикселей разделяется на ячейки 24 размером 8 пикселей*8 пикселей, таким образом, изображение включает 16*16=256 пересекающихся блоков 23, а каждый из блоков состоит из 2*2=4 ячеек, как показано на ФИГ. 2С.
[0062] На шаге 205 пиксели в каждой ячейке устанавливаются по n*1-мерному вектору.
[0063] После разделения изображения пиксели в каждой ячейке могут рассматриваться как матрица, и матрица, соответствующая пикселям в каждой ячейке, может быть выровнена по n*1-мерному вектору. В процессе установки матрицы второй столбец K227 в матрице 25, соответствующий пикселям, каскадируется так, чтобы располагаться под первым столбцом K126, а третий столбец (не показан на ФИГ.) в матрице 25, соответствующий пикселям, располагается каскадом так, чтобы находиться под вторым столбцом K227, и так далее. Таким образом, матрица 25, соответствующая пикселям в каждой ячейке, устанавливается по n*1-мерному вектору 28, как показано на ФИГ. 2D.
[0064] На шаге 206 векторы в каждой ячейке зависят от разложения разреженного сигнала для получения соответствующих разреженных векторов с использованием следующей формулы:
где y означает векторы в каждой ячейке, x означает разреженные векторы, полученные путем разреженного разложения в отношении y с использованием предустановленного словаря D,
[0065] Для каждой ячейки изображения терминал может получить оптимальный предустановленный словарь D путем итерационного расчета и принять векторы в каждой ячейке как данные наблюдаемые сигналы y, а затем определить разреженный вектор x для векторов в каждой ячейке с использованием оптимального предустановленного словаря D с использованием приведенной выше формулы. Поскольку выровненные векторы в каждой ячейке являются n*1-мерными, а предустановленный словарь D, полученный путем итерационного расчета терминалом, представляет собой матрицу n*m, то разреженный вектор, определенный по приведенной выше формуле, соответствующий векторам в каждой ячейке, является m*1-мерным.
[0066] На шаге 207 рассчитываются величина и направление градиента каждой ячейки в соответствии с разреженными векторами для получения дескриптора каждой ячейки.
[0067] Терминал может рассчитать поперечный и продольный градиенты каждого пикселя в каждой ячейке, зависящие от разложения разреженного сигнала с использованием оператора градиента.
[0068] То есть для каждого элемента разреженного вектора, соответствующего каждой ячейке, рассчитываются поперечный и продольный градиенты с использованием оператора градиента.
[0069] Например, типичные операторы градиента представлены в таблице 1 ниже:
Таблица 1


[0070] В варианте осуществления изобретения при расчете градиента пикселей в каждой ячейке может быть выбран любой оператор градиента в Таблице 1 или другие операторы градиента. Выбор оператора градиента не имеет конкретных ограничений в варианте осуществления изобретения.
[0071] Допуская, что поперечный градиент элемента на разреженном векторе представляет собой H(x, y), а продольный градиент - V(x, y), то направление и величина градиента, соответствующие элементу, могут быть рассчитаны по формулам (1) и (2), приведенным ниже:


где 
[0072] Направление градиента
[0073] Например, направление градиента
[0074] Количество зон, на которые разделяется направление градиента, не имеет конкретных ограничений в варианте осуществления изобретения.
[0075] На шаге 208 подсчитываются соответствующие дескрипторы в каждом блоке для получения Гистограммы ориентированных градиентов каждого блока.
[0076] Терминал определяет статистические данные дескрипторов, полученных для соответствующих ячеек, составляющих каждый блок, для получения Гистограммы ориентированных градиентов каждого блока.
[0077] При подсчете статистических данных всех дескрипторов, полученных для соответствующих клеток, терминал может располагать дескрипторы каскадом по отношению к соответствующим ячейкам, таким образом, Гистограммы ориентированных градиентов может быть вектором, причем размер вектора k-кратен размеру дескриптора, соответствующего ячейкам, составляющим блок.
[0078] Например, дескриптор в соответствующих ячейках представляет собой 9-размерный вектор, а каждый блок включает 4 ячейки. 9-мерные дескрипторы в 4 ячейках располагаются каскадом для образования 36-мерного вектора, представляющего собой гистограмму ориентированного градиента соответствующего блока.
[0079] На шаге 209 определяется Гистограммы ориентированных градиентов соответствующих блоков для получения Гистограммы ориентированных градиентов изображения.
[0080] Терминал определяет Гистограммы ориентированных градиентов соответствующих блоков для получения Гистограммы ориентированных градиентов изображения. Гистограммы ориентированного градиента соответствующих блоков изображения располагаются каскадом для образования матрицы и получения Гистограммы ориентированных градиентов изображения, где каждый столбец матрицы представляет собой Гистограмму ориентированных градиентов одного блока.
[0081] Например, изображение состоит из K блоков, и признак Гистограммы ориентированных градиентов каждого блока - Ki, тогда Гистограммы ориентированных градиентов Ki располагаются каскадом для образования матрицы 250, в которой K1 располагается в первом столбце 26 расположенной каскадом матрицы, K2 располагается во втором столбце 27 расположенной каскадом матрицы, и так далее, как показано на ФИГ. 2E.
[0082] Таким образом, путем получения опытных изображений, обладающих множеством категорий множеств образов; используя формулу итерации для получения оптимального словаря D; разделяя изображение на множество блоков, где каждый из блоков состоит из множества ячеек; устанавливая пиксели в каждой ячейке по n*1-мерному вектору; осуществляя разложение разреженного сигнала каждой ячейки с использованием формулы для получения соответствующего разреженного вектора; рассчитывая величину и направление градиента для каждой ячейки в соответствии с разреженным вектором для получения дескриптора для каждой ячейки; и получая статистические данные по соответствующим дескрипторам в каждом блоке для получения Гистограммы ориентированных градиентов изображения, способ выделения признаков, представленный в варианте осуществления настоящего изобретения, может решить проблему, связанную с тем, что скорость обнаружения и точность относительно низки при распознавании изображений в силу того, что процесс выделения признака Гистограммы ориентированных градиентов рассчитывается непосредственно с учетом пространственной области изображения. Благодаря использованию данного способа скорость обнаружения и точность могут быть повышены при распознавании изображений путем выделения признака Гистограммы ориентированных градиентов изображения в частотном интервале.
[0083] На основании альтернативного варианта осуществления изобретения, показанного на Фиг. 2A, в процессе получения статистических данных Гистограмм ориентированных градиентов соответствующих блоков изображения для получения Гистограммы ориентированных градиентов она может быть расположена с учетом соответствующего положения на изображении. Шаг 209 может быть заменен шагами 209a и 209b, как показано на ФИГ. 3A.
[0084] На шаге 209a Гистограммы ориентированных градиентов каждого блока объединяются в матрицу M*N с первоначального L*1-мерного вектора, при этом каждый блок состоит из M*N пикселей, а L=M*N.
[0085] Гистограмма ориентированных градиентов каждого блока представляет собой L*1-мерный вектор, полученный путем расположения каскадом дескрипторов, соответствующих каждой ячейке. Терминал приводит L*1-мерный вектор в соответствие с матрицей M*N, то есть L*1-мерный вектор в каждом блоке приводится в соответствие с соответствующей матрицей в соответствии с входящими в него ячейками, где каждый столбец соответствующей матрицы является дескриптором ячейки; а затем дескрипторы каждой ячейки устанавливаются в соответствии с пикселями, где каждый столбец выровненной матрицы представляет собой Гистограмму ориентированных градиентов, соответствующую пикселям соответствующего столбца в соответствующем блоке.
[0086] На шаге 209b получаем гистограмму ориентированного градиента изображения в соответствии с выровненными гистограммами ориентированного градиента каждого блока и соответствующим положением каждого блока на изображении.
[0087] В соответствии с выровненными Гистограммами ориентированных градиентов каждого блока и соответствующим положением каждого блока на изображении, получаем Гистограмму ориентированных градиентов положения соответствующих пикселей изображения.
[0088] Например, изображение состоит из K блоков, и Гистограммы ориентированных градиентов соответствующих блоков представляют собой Ki, таким образом, Гистограммы ориентированных градиентов Ki объединяются в матрицу M*N. Матрица 31, составленная K1, помещается на соответствующую позицию первого блока 32 на изображении, матрица 33, составленная из K2, помещается на соответствующую позицию второго блока 34 на изображении, и так далее; наконец, матрица MN помещается на соответствующую позицию последнего блока MN на изображении, как показано на ФИГ. 3B.
[0089] Резюмируя сказанное, объединяя Гистограммы ориентированных градиентов каждого блока изображения с первоначального L*1-мерного вектора в матрицу M*N, где каждый блок состоит из M*N пикселей, а L=M*N; получая Гистограмму ориентированных градиентов изображения в соответствии с установленными Гистограммами ориентированных градиентов каждого блока и соответствующим положением каждого блока на изображении; и обеспечивая, таким образом, соответствие выделенных Гистограмм ориентированных градиентов изображения соответствующим позициям каждого блока на изображении, способ выделения признаков, представленный в данном варианте осуществления изобретения, может выделять признак каждого блока изображения.
[0090] Описанные ниже варианты осуществления изобретения являются вариантами осуществления устройства, представленного в настоящем изобретении, который может использоваться для реализации способа, как продемонстрировано в вариантах осуществления изобретения. Для получения информации, не указанной в вариантах осуществления настоящего устройства, см. варианты реализации способа, представленного в данном изобретении.
[0091] ФИГ. 4 представляет собой блок-схему, иллюстрирующую устройство для выделения признаков в соответствии с примерным вариантом осуществления изобретения. Как показано на ФИГ. 4, устройство для выделения признаков может включать, в том числе:
[0092] разделительный модуль 420 для разделения изображения на множество блоков, в котором каждый из блоков состоит из множества ячеек;
[0093] модуль разложения 440 для разложения разреженного сигнала в отношении каждой ячейки с использованием предустановленного словаря D для получения разреженного вектора для каждой из ячеек соответственно;
[0094] где предустановленный словарь D представляет собой словарь, определенный с применением итерационного алгоритма к опытным изображениям, а разложение разреженного сигнала относится к конвертированию данного наблюдаемого сигнала в разреженный вектор в соответствии с предустановленным словарем D, где значение множества элементов разреженного сигнала равно нулю.
[0095] В данном варианте осуществления изобретения пиксели в каждой ячейке служат как данные наблюдаемые сигналы, получая, таким образом, соответствующие разреженные сигналы каждой ячейки.
[0096] выделительный модуль 460 для выделения Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами.
[0097] Гистограмма ориентированных градиентов изображения выделяется в соответствии с разреженным вектором, обработанным в процессе разложения разреженного сигнала.
[0098] Таким образом, путем разделения изображения на множество блоков, где каждый из блоков состоит из множества ячеек; разложения разреженного сигнала каждой ячейки с использованием предустановленного словаря D для получения разреженного вектора для каждой из ячеек соответственно, где предопределенный словарь D представляет собой словарь, определенный путем применения итерационного алгоритма к опытному изображению; и выделения Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами устройство для выделения признаков, представленное в изобретении, может решить проблему, связанную с тем, что скорость обнаружения и точность относительно низки при распознавании изображений в силу того, что процесс выделения Гистограммы ориентированных градиентов рассчитывается непосредственно с учетом пространственной области изображения. Благодаря использованию данного способа скорость обнаружения и точность в процессе распознавания изображений могут быть повышены при получении Гистограммы ориентированных градиентов изображения в частотном интервале.
[0099] ФИГ. 5 представляет собой блок-схему, иллюстрирующую устройство для выделения признаков в соответствии с другим примерным вариантом осуществления изобретения. Как показано на ФИГ. 5, устройство для выделения признаков может включать, в том числе:
[00100] Обрабатывающий модуль 510 для нормализации изображения и получения изображения предустановленного размера.
[00101] Распознавание изображений обычно включает в себя выделение признаков множества изображений.
[00102] Перед выделением признаков изображения обрабатывающий модуль 510 может осуществлять нормализацию изображения для трансформации изображений разных размеров в изображения предустановленного размера и осуществления их унифицированной обработки.
[00103] Получающий модуль 520 для получения опытного изображения, обладающего множеством категорий множеств образов.
[00104] Получающий модуль 520 может получить опытное изображение из библиотеки опытных изображений, где опытные изображения включают в себя совокупность категорий настроек изображений, таких как распознавание лиц, тел или транспортных средств и тому подобных.
[00105] Итерационный модуль 530 для использования следующей формулы и проведения итерации для получения оптимального словаря в качестве предустановленного словаря D:
где R= [r1, r2, …, rC] обозначает разреженную матрицу коэффициентов C опытных изображений, Y обозначает все категории опытных изображений,
[00106] Алгоритм K-SVD может обеспечить получение словарем информации в опытных изображениях посредством итерационного процесса, использующего разреженные коэффициенты обозначения для обновления элементов словаря. Посредством непрерывной итерации в итоге получается набор элементов словаря, которые могут отражать признаки изображения, а именно предустановленный словарь D, где элементы относятся к элементам словаря. То есть окончательный предустановленный словарь представляет собой оптимальный словарь, полученный путем получения информации опытными изображениями.
[00107] итерационный процесс алгоритмов K-SVD следующий: предполагая, что имеется X категорий опытных изображений, для i-й категории даны Ni опытных изображений. Все опытные изображения i-й категории представлены матрицей
[00108] Устройство может также включать в себя разделительный модуль 540 для деления изображения на множество блоков, в котором каждый из блоков состоит из множества ячеек.
[00109] В качестве альтернативы, разделение нормализованного изображения разделительным модулем 540 может происходить так: сначала разделение изображения на множество блоков, а затем - разделение каждого из блоков на множество ячеек.
[00110] В качестве альтернативы, разделение нормализованного изображения разделительным модулем 540 может происходить так: сначала разделение изображения на множество ячеек, а затем - объединение смежных ячеек в блоки, состоящие из множества ячеек. Например, блок может состоять из четырех смежных парных ячеек, объединенных в форме китайского иероглифа “”.
[00111] В варианте осуществления изобретения, в процессе разделения изображения разделительным модулем 540, разделение на блоки может производиться перед разделением на ячейки, и наоборот. Порядок выполнения не имеет конкретных ограничений.
[00112] В данном варианте осуществления изобретения может присутствовать, а может отсутствовать, перекрывающаяся область между разделенными блоками изображения. Разделительный модуль 540 может не ограничиваться этим.
[00113] Устройство может также включать модуль разложения 550 для разложения разреженного сигнала каждой ячейки с использованием предустановленного словаря D для получения разреженного вектора, соответствующего каждой ячейке.
[00114] Предустановленный словарь D представляет собой словарь, определенный с применением итерационного алгоритма к опытным изображениям, а разложение разреженного сигнала относится к конвертированию данного наблюдаемого сигнала в разреженный вектор в соответствии с предустановленным словарем D, где значение множества элементов разреженного сигнала равно нулю.
[00115] В данном варианте осуществления изобретения пиксели в каждой ячейке служат в качестве данного наблюдаемого сигнала и конвертируются в соответствующий разреженный вектор, в соответствии с предустановленным словарем D, получая, таким образом, соответствующий разреженный сигнал каждой из ячеек.
[00116] В данном варианте осуществления изобретения модуль разложения 550 может включать следующие подмодули.
[00117] Первый установочный подмодуль 551 для установки пикселей каждой ячейки по n*1-мерному вектору.
[00118] После разделения изображения пиксели в каждой ячейке могут рассматриваться как матрица, и матрица, соответствующая пикселям в каждой ячейке, может быть выровнена по n*1-мерному вектору.
[00119] Модуль разложения 550 может также включать подмодуль разложения сигнала 552 для разложения разреженного сигнала на векторы в каждой ячейке в соответствии с предустановленным словарем D для получения соответствующего разреженного вектора с использованием следующей формулы:
где y означает векторы в каждой ячейке, x означает разреженный вектор, полученный путем разреженной обработки y с использованием предустановленного словаря D,
[00120] Для каждой ячейки изображения итерационным модулем 530 рассчитывается оптимальный предустановленный словарь D, а подмодуль разложения сигнала 552 использует векторы в каждой ячейке как данные наблюдаемые сигналы y, тогда разреженный вектор x для векторов в каждой ячейке рассчитывается с использованием заданного сверхполного словаря D с использованием приведенной выше формулы. Поскольку выровненные векторы в каждой ячейке являются n*1-мерными, а предустановленный словарь D, определенный итерационным модулем 530, представляет собой матрицу n*m, то разреженный вектор, соответствующий векторам в каждой ячейке и определенный по приведенной выше формуле, является m*1-мерным.
[00121] Устройство может также включать выделительный модуль 560 для выделения Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами.
[00122] Гистограммы ориентированных градиентов изображения выделяются в соответствии с разреженными векторами, полученными в результате разложения разреженного сигнала.
[00123] В данном варианте осуществления изобретения выделительный модуль 560 может также включать следующие подмодули.
[00124] Расчетный подмодуль 561 для расчета величины и направления градиента каждой ячейки в соответствии с разреженными векторами для получения дескриптора каждой ячейки.
[00125] Расчетный подмодуль 561 может рассчитывать поперечный и продольный градиенты каждого пикселя в каждой ячейке, зависящие от разложения разреженного сигнала с использованием с использованием оператора градиента. Данный вариант осуществления изобретения не имеет конкретных ограничений в отношении выбор оператора градиента.
[00126] То есть для каждого элемента разреженного вектора, соответствующего каждой ячейке, поперечный и продольный градиенты рассчитываются с использованием оператора градиента.
[00127] Допуская, что поперечный градиент элемента на разреженном векторе представляет собой H(x, y), а продольный градиент - V(x, y), то направление и величина градиента, соответствующие элементу, могут быть рассчитаны по формулам (1) и (2), приведенным ниже:
где
[00128] Направление градиента
[00129] Выделительный модуль 560 может также включать первый статистический подмодуль 562 для получения статистики по соответствующим дескрипторам в каждом блоке и Гистограммы ориентированных градиентов каждого блока.
[00130] Первый статистический подмодуль 562 может осуществлять получение статистических данных дескрипторов соответствующих ячеек, составляющих каждый блок, для получения Гистограммы ориентированных градиентов каждого блока.
[00131] При подсчете статистических данных дескрипторов соответствующих ячеек первый статистический подмодуль может располагать дескрипторы соответствующих ячеек каскадом, таким образом, Гистограмма ориентированных градиентов каждого блока представляет собой вектор, размер которого k-кратен размеру дескриптора, соответствующего ячейкам, составляющим блок.
[00132] Выделительный модуль 560 может также включать второй статистический подмодуль 563 для получения статистики Гистограмм ориентированных градиентов соответствующих блоков изображения для получения Гистограммы ориентированных градиентов изображения.
[00133] Второй статистический подмодуль 563 может получать статистику гистограмм ориентированного градиента соответствующих блоков изображения для получения Гистограммы ориентированных градиентов изображения.
[00134] В качестве альтернативы, второй статистический подмодуль 563 может быть настроен для расположения Гистограммы ориентированных градиентов каждого блока каскадом для образования матрицы и получения Гистограммы ориентированных градиентов изображения, где каждый столбец матрицы является Гистограммой ориентированных градиентов одного из блоков.
[00135] Таким образом, путем получения опытных изображений, обладающих множеством категорий множеств образов; используя формулу итерации для получения оптимального словаря, используемого в качестве предустановленного словаря D; разделяя изображение на множество блоков, где каждый из блоков состоит из множества ячеек; устанавливая пиксели в каждой ячейке по n*1-мерному вектору; осуществляя разложение разреженного сигнала каждой ячейки с использованием формулы для получения соответствующего разреженного вектора; рассчитывая величину и направление градиента для каждой ячейки в соответствии с разреженным вектором для получения дескриптора каждой ячейки; и получая статистические данные по соответствующим дескрипторам в каждом блоке для получения Гистограммы ориентированных градиентов изображения, устройство для выделения признаков, представленное в данном варианте осуществления настоящего изобретения, может решить проблему, связанную с тем, что скорость обнаружения и точность при распознавании изображений относительно низки в силу того, что процесс выделения гистограммы ориентированного градиента рассчитывается непосредственно с учетом пространственной области изображения. Благодаря использованию данного способа скорость обнаружения и точность в процессе распознавания изображений могут быть повышены при получении Гистограммы ориентированных градиентов изображения в частотном интервале.
[00136] С учетом альтернативного варианта осуществления изобретения, показанного на Фиг. 5, второй статистический подмодуль 563 может также включать в себя следующие подмодули, как показано на Фиг. 6:
[00137] второй установочный подмодуль 610 для установки Гистограмм ориентированных градиентов каждого блока изображения с первоначального L*1-мерного вектора в матрицу M*N, где каждый блок состоит из M*N пикселей, а L=M*N.
[00138] Гистограмма ориентированных градиентов каждого блока представляет собой L*1-мерный вектор, полученный путем расположения каскадом дескрипторов, соответствующих каждой ячейке. Второй установочный подмодуль 610 может устанавливать L*1-мерный вектор в матрицу M*N, то есть L*1-мерный вектор в каждом блоке приводится в соответствие с соответствующей матрицей в соответствии с входящими в него ячейками, где каждый столбец соответствующей матрицы является дескриптором ячейки; а затем дескрипторы каждой ячейки устанавливаются в соответствии с пикселями, где каждый столбец выровненной матрицы представляет собой Гистограмму ориентированных градиентов, соответствующую пикселям соответствующего столбца в соответствующем блоке.
[00139] подмодуль выделения признаков 620 для получения Гистограммы ориентированных градиентов изображения в соответствии с выровненными Гистограммами ориентированных градиентов каждого блока и соответствующим положением каждого блока на изображении.
[00140] Подмодуль выделения признаков 620 может получать Гистограммы ориентированных градиентов положений соответствующих пикселей на изображении в соответствии со установленными Гистограммами ориентированных градиентов каждого блока и соответствующего положения каждого блока на изображении.
[00141] Таким образом, регулируя Гистограммы ориентированных градиентов каждого блока изображения с первоначального L*1-мерного вектора в матрицу M*N, где каждый блок состоит из M*N пикселей, а L=M*N; получая Гистограмму ориентированных градиентов изображения в соответствии с установленными Гистограммами ориентированных градиентов каждого блока и соответствующим положением каждого блока на изображении; и обеспечивая, таким образом, соответствие выделенных Гистограмм ориентированных градиентов изображения соответствующим позициям каждого блока на изображении, устройство для выделения признаков, представленное в данном варианте осуществления изобретения, может выделять признак каждого блока изображения.
[00142] В отношении устройства, описанного в вышеуказанных вариантах осуществления изобретения, данные варианты осуществления в подробностях раскрывают конкретные действия, выполняемые соответствующими модулями, относящиеся к соответствующим способам, поэтому отсутствует необходимость в подробном рассмотрении.
[00143] В примерном варианте осуществления изобретения описывается устройство для выделения признаков, которое может использовать способ выделения признаков, относящийся к настоящему изобретению, устройство, включающее: процессор; и память, используемая для хранения команд, исполнимых процессором;
[00144] причем процессор выполнен с возможностью:
[00145] разделения изображения на множество блоков, в котором каждый из блоков состоит из множества ячеек;
[00146] разложения разреженного сигнала по каждой ячейке с использованием предустановленного словаря D для получения разреженного вектора, соответствующего каждой ячейке, где предустановленный словарь D представляет собой словарь, определенный с применением итерационного алгоритма к опытному изображению;
[00147] выделения Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами.
[00148] ФИГ. 7 представляет собой блок-схему, иллюстрирующую устройство 700 для выделения признаков в соответствии с примерным вариантом осуществления изобретения. Например, устройством 700 может быть мобильный телефон, компьютер, цифровой передающий терминал, устройство рассылки сообщений, игровая консоль, планшетный компьютер, медицинское устройство, тренировочное оборудование, карманный персональный компьютер и т. д.
[00149] Согласно ФИГ. В соответствии с фиг. 7 устройство 700 может включать в себя один или более следующих компонентов: обрабатывающий компонент 702, память 704, питающий компонент 706, мультимедийный компонент 708, аудиокомпонент 710, интерфейс 712 ввода-вывода, сенсорный компонент 714 и коммуникационный компонент 716.
[00150] Обрабатывающий компонент 702, как правило, управляет всеми операциями, выполняемыми устройством 700, например операциями, связанными с отображением, телефонными вызовами, передачей данных, функционированием камеры, операциями записи. Обрабатывающий компонент 702 может включать в себя процессоры 718 для исполнения инструкций для выполнения шагов в соответствии с вышеуказанными способами. Кроме того, обрабатывающий компонент 702 может включать в себя модули, способствующие взаимодействию между обрабатывающим компонентом 702 и другими компонентами. Например, обрабатывающий компонент 702 может включать в себя мультимедийный модуль, способствующий взаимодействию между мультимедийным компонентом 708 и обрабатывающим компонентом 702.
[00151] Память 704 выполнена с возможностью хранения различных типов данных для поддержки функционирования устройства 700. Примеры таких типов данных могут включать в себя инструкции для каких-либо приложений или способов, используемых на устройстве 700, контактные данные, данные телефонной книги, сообщения, изображения, видео и т. д. Память 704 может быть выполнена с возможностью использования любого типа энергозависимых или энергонезависимых устройств или их сочетания, например Статическое Запоминающее Устройство с Произвольной Выборкой СЗУПВ (SRAM), Электрически Стираемая Программируемая Постоянная Память ЭСППП (EEPROM), Стираемая Программируемая Постоянная Память СППП (EPROM), Постоянное Запоминающее Устройство ПЗУ (ROM), магнитное запоминающее устройство, флэш-память, магнитный или оптический диск.
[00152] Питающий компонент 706 используется для подачи питания на различные компоненты устройства 700. Питающий компонент 706 может включать себя систему управления питанием, источники питания и другие компоненты, связанные с генерацией, управлением и распределением питания устройства 700.
[00153] Мультимедийный компонент 708 включает в себя экран, обеспечивающий выходной интерфейс между устройством 700 и пользователем. В некоторых вариантах осуществления экран может включать в себя Жидко-Кристаллический Дисплей ЖКД (LCD) и Сенсорную Панель СП (TP). Если экран включает в себя сенсорную панель, возможен вариант осуществления, в котором сенсорную панель используют для получения входных сигналов от пользователя. Сенсорная панель включает в себя датчики касания для обнаружения касаний, скольжений по экрану и жестов на сенсорной панели. Сенсорные панели выполнены с возможностью не только определения границ касания или скольжения, но и с возможностью определения продолжительности и давления, связанного с касанием или скольжением. В некоторых вариантах осуществления мультимедийный компонент 708 включает в себя переднюю камеру и/или заднюю камеру. Передняя камера и задняя камеры могут быть выполнены с возможностью получения внешних мультимедийных данных, когда устройство 700 находится в рабочем режиме, например в режиме фотосъемки или видеосъемки. Как передняя, так и задняя камера может выполнена в форме фиксированной оптической системы или с возможностью оптической регулировки фокусного расстояния и увеличения.
[00154] Аудиокомпонент 710 выполнен с возможностью вывода и/или ввода аудиосигналов. Например, аудиокомпонент 710 может включать в себя микрофон ("MIC"), выполненный с возможностью получения внешнего аудиосигнала, когда устройство 700 находится в рабочем режиме, например в режиме вызова, в режиме записи, в режиме распознавания голосовых данных. Полученный аудиосигнал может затем сохраняться в памяти 704 или передаваться через коммуникационный компонент 716. В некоторых вариантах осуществления аудиокомпонент 710 дополнительно включает в себя громкоговоритель для вывода звуковых сигналов.
[00155] Интерфейс 712 ввода-вывода представляет собой интерфейс между обрабатывающим компонентом 702 и периферийными интерфейсными модулями, например клавиатурой, манипулятором типа Click Wheel, кнопками и т. д. Помимо прочего, кнопки могут включать в себя кнопку "Домой" (Home), кнопку регулировки громкости, пусковую кнопку, блокирующую кнопку.
[00156] Сенсорный компонент 714 включает в себя датчики, обеспечивающие оценку состояния различных аспектов устройства 700. Например, сенсорный компонент 714 может определять открытое/закрытое состояние устройства 700, относительное позиционирование компонентов (например, дисплея и клавиатуры устройства 700), изменение положения устройства 700 или компонента устройства 700, наличие или отсутствие контакта пользователя с устройством 700, ориентацию, ускорение / замедление движения устройства 700 и изменение температуры устройства 700. Сенсорный компонент 714 может включать в себя датчик приближения, выполненный с возможностью обнаружения присутствия объекта поблизости без физического контакта. Сенсорный компонент 714 также может включать в себя датчик освещенности, например датчик на основе Комплементарного Металл-Оксидного Полупроводника КМОП (CMOS), датчик на основе Прибора с Зарядовой Связью (ПЗС), используемые для работы с изображениями. В некоторых вариантах осуществления изобретения сенсорный компонент 714 также может включать в себя датчик ускорения, гиродатчик, магнитный датчик, датчик давления или датчик температуры.
[00157] Коммуникационный компонент 716 выполнен с возможностью повышения удобства проводной или беспроводной коммуникации между устройством 700 и другими устройствами. Устройство 700 может быть выполнено с возможностью доступа к беспроводной сети на основе стандарта связи, например Wi-Fi, 2G, 3G или их сочетания. В примерном варианте осуществления изобретения коммуникационный компонент 716 получает раздаваемый сигнал или передаваемую соответствующую информацию от внешней системы управления широковещательной передачей через широковещательный канал. В примерном варианте осуществления изобретения коммуникационный компонент 716 дополнительно включает в себя модуль Коммуникации Ближнего Поля КБП (NFC), способствующий коммуникации малого радиуса действия. Например, модуль КБП может быть выполнен на основе технологии Радиочастотной Идентификации РИ (RFID), технологии ассоциации инфракрасной передачи данных АИПД (IrDA), технологии Сверхширокополосной Передачи СШП (UWB), технологии Bluetooth (BT) и других технологий.
[00158] В примерных вариантах осуществления устройство 700 может быть выполнено с использованием Интегральных Схем Специального Назначения ИССН (ASIC), Цифровых Сигнальных Процессоров ЦСП (DSP), Устройств Цифровой Обработки Сигналов УЦОС (DSPD), Программируемых Логических Устройств ПЛУ (PLD), Программируемой Пользователем Вентильной Матрицы ППВМ (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов для осуществления вышеописанных способов выделения признаков.
[00159] В примерных вариантах осуществления изобретения также предлагается энергонезависимый машиночитаемый накопитель, включающий в себя инструкции, например, содержащиеся в памяти 704, исполняемые процессором 718 в устройстве 700 для осуществления способов выделения признаков, раскрытых выше. Например, в качестве энергонезависимого машиночитаемого накопителя может использоваться ПЗУ, Оперативное Запоминающее Устройство ОЗУ (RAM), ПЗУ на компакт-диске (CD-ROM), магнитная лента, дискета, оптическое устройство хранения данных и т. д.
[00160] Другие варианты осуществления изобретения очевидны для специалистов в данной области техники из рассмотрения спецификации и практики использования изобретения, раскрываемого в настоящем документе. Настоящая заявка предназначена для охвата любых вариаций, областей применения или адаптаций изобретения в соответствии с общими принципами, изложенными в заявке, и включая отклонения от настоящего изобретения в соответствии с известной или общепринятой практикой в данной области техники. Спецификацию и примеры рассматривают только в качестве примеров, а действительный объем и сущность изобретения определяют формулой далее.
[00161] Следует понимать, что настоящая идея изобретения не ограничивается точной вышеописанной конструкцией, проиллюстрированной на сопровождающих чертежах, возможны различные модификации и изменения без отклонения от объема притязаний настоящего изобретения. Объем притязаний настоящего изобретения ограничивается лишь формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ВЫДЕЛЕНИЯ ХАРАКТЕРИСТИКИ | 2015 |
|
RU2635267C2 |
| СПОСОБ И УСТРОЙСТВО ВЫДЕЛЕНИЯ ХАРАКТЕРИСТИКИ | 2015 |
|
RU2632578C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОТСЛЕЖИВАНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ДЕСКРИПТОРОВ, ИНВАРИАНТНЫХ ОТНОСИТЕЛЬНО ВРАЩЕНИЯ | 2010 |
|
RU2542946C2 |
| УСТРОЙСТВО ПОИСКА ДУБЛИКАТОВ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2538319C1 |
| Система и способ обработки данных и распознавания объектов в режиме реального времени | 2022 |
|
RU2802280C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДСТАВЛЕНИЯ И ИДЕНТИФИКАЦИИ ДЕСКРИПТОРОВ ПРИЗНАКОВ С ИСПОЛЬЗОВАНИЕМ СЖАТОЙ ГИСТОГРАММЫ ГРАДИЕНТОВ | 2009 |
|
RU2505856C2 |
| СПОСОБ РАЗДЕЛЕНИЯ ТЕКСТОВ И ИЛЛЮСТРАЦИЙ В ИЗОБРАЖЕНИЯХ ДОКУМЕНТОВ С ИСПОЛЬЗОВАНИЕМ ДЕСКРИПТОРА СПЕКТРА ДОКУМЕНТА И ДВУХУРОВНЕВОЙ КЛАСТЕРИЗАЦИИ | 2017 |
|
RU2656708C1 |
| СПОСОБ И СИСТЕМА РАСПОЗНАВАНИЯ ЭМОЦИОНАЛЬНОГО СОСТОЯНИЯ СОТРУДНИКОВ | 2021 |
|
RU2768545C1 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ ДВУМЕРНЫХ СИГНАЛОВ НА ОСНОВЕ РЕКОНСТРУКЦИИ ИСКАЖЕННЫХ ПИКСЕЛЕЙ ИЗОБРАЖЕНИЙ | 2014 |
|
RU2582554C1 |
| Способ автоматической сегментации флюорограмм грудной клетки больных пневмонией | 2016 |
|
RU2629629C1 |



Изобретение относится к обработке изображений. Технический результат заключается в выделении гистограммы ориентированных градиентов. Способ выделения изображений, включает в себя: разделение изображения на множество блоков, каждый из блоков состоит из множества ячеек; разложение разреженного сигнала по каждой ячейке с использованием предустановленного словаря D для получения разреженного вектора для каждой ячейки, где предустановленный словарь D представляет собой словарь, определенный с применением к опытному изображению итерационного алгоритма. Выделение Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами, при этом выделение Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами включает в себя: расчет величины и направления градиента каждой ячейки в соответствии с разреженными векторами для получения дескриптора каждой ячейки; получение статистики по соответствующим дескрипторам в каждом блоке для получения Гистограммы ориентированных градиентов каждого блока; получение статистики по Гистограмме ориентированных градиентов каждого блока для получения Гистограммы ориентированных градиентов изображения. 3 н. и 10 з.п. ф-лы, 12 ил.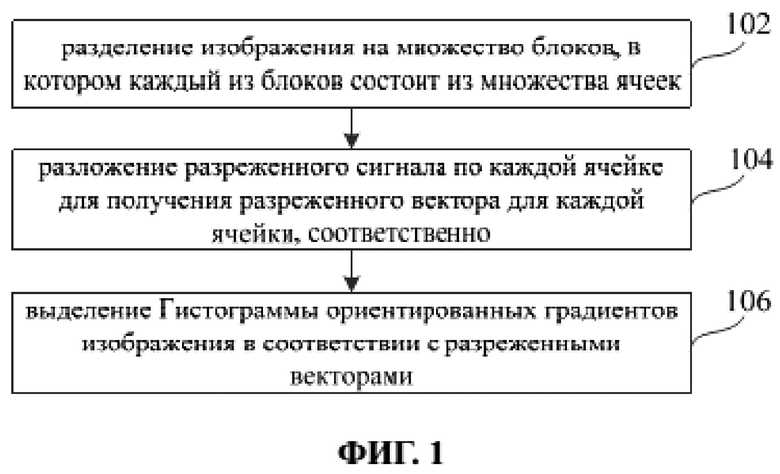
1. Способ выделения изображений, включающий в себя:
разделение изображения на множество блоков, в котором каждый из блоков состоит из множества ячеек;
разложение разреженного сигнала по каждой ячейке с использованием предустановленного словаря D для получения разреженного вектора для каждой ячейки соответственно, где предустановленный словарь D представляет собой словарь, определенный с применением к опытному изображению итерационного алгоритма;
выделение Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами,
при этом выделение Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами включает в себя:
расчет, в соответствии с разреженными векторами, величины и направления градиента каждой ячейки в соответствии с разреженными векторами для получения дескриптора каждой ячейки;
получение статистики по соответствующим дескрипторам в каждом блоке для получения Гистограммы ориентированных градиентов каждого блока;
получение статистики по Гистограмме ориентированных градиентов каждого блока для получения Гистограммы ориентированных градиентов изображения.
2. Способ по п. 1, дополнительно содержащий:
получение опытного изображения, где опытное изображение включает в себя совокупность категорий множеств образов;
выполнение итераций для получения оптимального словаря в качестве предустановленного словаря D с использованием следующей формулы:
 , если
, если  ,
,
где R=[r1, r2, … rc] обозначает разреженную матрицу коэффициентов С опытных изображений, Y обозначает все категории опытных изображений,  обозначает расчет количества ненулевых элементов в векторе, Т0 означает заданный верхний разреженный предел, а
обозначает расчет количества ненулевых элементов в векторе, Т0 означает заданный верхний разреженный предел, а  означает расчет суммы квадратов каждого элемента вектора, а затем возведение этой суммы квадратов в квадрат.
означает расчет суммы квадратов каждого элемента вектора, а затем возведение этой суммы квадратов в квадрат.
3. Способ по п. 2, где разложение разреженного сигнала в отношении каждой ячейки с использованием предустановленного словаря D для получения разреженного вектора для каждой из ячеек соответственно включает в себя:
установку пикселей в каждой ячейке по n*1-мерному вектору; и
выполнение, с использованием предустановленного словаря D, разложения разреженного сигнала на векторе в каждой ячейке для получения соответствующих разреженных векторов с использованием следующей формулы:
 , если у=Dx,
, если у=Dx,
где у означает вектор в каждой ячейке, х означает разреженный вектор, полученный путем разреженной обработки у с использованием предустановленного словаря D,  означает сумму абсолютных значений каждого столбца разреженного вектора х, где каждый разреженный вектор представляет собой m*1-мерный вектор, а предустановленный словарь D - матрицу n*m.
означает сумму абсолютных значений каждого столбца разреженного вектора х, где каждый разреженный вектор представляет собой m*1-мерный вектор, а предустановленный словарь D - матрицу n*m.
4. Способ по п. 1, где получение статистики по Гистограмме ориентированных градиентов каждого блока изображения для получения Гистограммы ориентированных градиентов изображения включает в себя:
расположение Гистограмм ориентированных градиентов каждого блока изображения каскадом в матрицу для получения Гистограммы ориентированных градиентов изображения, где каждый столбец матрицы представляет собой Гистограмму ориентированных градиентов одного блока.
5. Способ по п. 1, где получение статистики по Гистограмме ориентированных градиентов каждого блока изображения для получения Гистограммы ориентированных градиентов изображения включает в себя:
установку Гистограммы ориентированных градиентов каждого блока с первоначального L*1-мерного вектора в матрицу M*N, при этом каждый блок состоит из M*N пикселей, a L=M*N; и
получение Гистограммы ориентированных градиентов изображения в соответствии с установленными Гистограммами ориентированных градиентов каждого блока и соответствующим положением каждого блока на изображении.
6. Способ по любому из пп. 1-5, дополнительно содержащий:
нормализацию изображения для получения изображения предустановленного размера.
7. Устройство для выделения изображений, включающее в себя:
разделительный модуль для разделения изображения на множество блоков, в котором каждый из блоков состоит из множества ячеек;
модуль разложения для разложения разреженного сигнала по каждой ячейке с использованием предустановленного словаря D для получения разреженного вектора, соответствующего каждой ячейке, где предустановленный словарь D представляет собой словарь, определенный с применением итерационного алгоритма к опытному изображению;
выделительный модуль для выделения Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами,
при этом выделительный модуль содержит:
расчетный субмодуль для определения относительной величины и направления градиента каждой ячейки в соответствии с разреженными векторами для получения дескриптора каждой ячейки;
первый статистический субмодуль для расчета статистики по соответствующим дескрипторам в каждом блоке для получения Гистограммы ориентированных градиентов каждого блока; и
второй статистический субмодуль для расчета статистики Гистограммы ориентированных градиентов каждого блока изображения для получения Гистограммы ориентированных градиентов изображения.
8. Устройство по п. 7, дополнительно содержащее:
получающий модуль для получения опытного изображения, включающего совокупность множеств категорий образов;
итерационный модуль для выполнения итераций для получения оптимального словаря в качестве предустановленного словаря D с использованием следующей формулы:
 , если
, если  ,
,
где R=[r1, r2, … rc] обозначает разреженную матрицу коэффициентов С опытных изображений, Y обозначает все категории опытных изображений,  обозначает расчет количества ненулевых элементов в векторе, Т0 означает заданный верхний разреженный предел, а
обозначает расчет количества ненулевых элементов в векторе, Т0 означает заданный верхний разреженный предел, а  означает расчет суммы квадратов каждого элемента вектора, а затем возведение этой суммы квадратов в квадрат.
означает расчет суммы квадратов каждого элемента вектора, а затем возведение этой суммы квадратов в квадрат.
9. Устройство по п. 8, в котором модуль разложения содержит:
первый установочный субмодуль для установки пикселей в каждой ячейке по n*1-мерному вектору; и
субмодуль разложения сигнала для выполнения, с использованием предустановленного словаря D, разложения разреженного сигнала на векторе в каждой ячейке для получения соответствующего разреженного вектора с использованием следующей формулы:
 , если у=Dx,
, если у=Dx,
где у означает вектор в каждой ячейке, х означает разреженный вектор, полученный путем разреженной обработки у с использованием предустановленного словаря D,  означает сумму абсолютных значений каждого столбца разреженного вектора х, где каждый разреженный вектор представляет собой m*1-мерный вектор, а предустановленный словарь D-матрицу n*m.
означает сумму абсолютных значений каждого столбца разреженного вектора х, где каждый разреженный вектор представляет собой m*1-мерный вектор, а предустановленный словарь D-матрицу n*m.
10. Устройство по п. 8, в котором второй статистический субмодуль способен располагать Гистограммы ориентированных градиентов каждого блока изображения каскадом в матрицу для получения Гистограммы ориентированных градиентов изображения, где каждый столбец матрицы представляет собой Гистограмму ориентированных градиентов одного из блоков.
11. Устройство по п. 8, в котором второй статистический субмодуль включает в себя:
второй установочный субмодуль для установки Гистограмм ориентированных градиентов каждого блока изображения с первоначального L*1-мерного вектора в матрицу M*N, где каждый блок состоит из M*N пикселей, а L=M*N; и
субмодуль выделения признаков для получения Гистограммы ориентированных градиентов изображения в соответствии с настроенными Гистограммами ориентированных градиентов каждого блока и соответствующим положением каждого блока на изображении.
12. Устройство по любому из пп. 7-11, дополнительно включающее:
обрабатывающий модуль для нормализации изображения для получения изображения предустановленного размера.
13. Устройство для выделения признаков, включающее в себя:
процессор,
память для хранения инструкций, исполняемых процессором;
причем процессор выполнен с возможностью:
разделения изображения на множество блоков, в котором каждый из блоков состоит из множества ячеек;
разложения разреженного сигнала по каждой ячейке с использованием предустановленного словаря D для получения разреженного вектора, соответствующего каждой ячейке, где предустановленный словарь D представляет собой словарь, определенный с применением итерационного алгоритма к опытному изображению;
выделения Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами,
при этом выделение Гистограммы ориентированных градиентов изображения в соответствии с разреженными векторами включает в себя:
расчет, в соответствии с разреженными векторами, величины и направления градиента каждой ячейки в соответствии с разреженными векторами для получения дескриптора каждой ячейки;
получение статистики по соответствующим дескрипторам в каждом блоке для получения Гистограммы ориентированных градиентов каждого блока;
получение статистики по Гистограмме ориентированных градиентов каждого блока для получения Гистограммы ориентированных градиентов изображения.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| УСТРОЙСТВО КОДИРОВАНИЯ ИЗОБРАЖЕНИЯ, СПОСОБ КОДИРОВАНИЯ ИЗОБРАЖЕНИЯ, УСТРОЙСТВО ДЕКОДИРОВАНИЯ ИЗОБРАЖЕНИЯ, СПОСОБ ДЕКОДИРОВАНИЯ ИЗОБРАЖЕНИЯ, ПРОГРАММА И ЗАПОМИНАЮЩИЙ НОСИТЕЛЬ | 2008 |
|
RU2496252C2 |
| УСТРОЙСТВО ОБРАБОТКИ ВИДЕОИНФОРМАЦИИ СИСТЕМЫ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2484531C2 |
| US 7725484 B2, 25.05.2010. | |||

