Изобретение относится к приборостроению, например в области геофизики, и может быть использовано для регистрации механических колебаний, в частности высокочастотных сейсмических шумов (ВСШ), резонансным методом в широкой полосе частот.
Известен преобразователь механических колебаний с регулируемой резонансной частотой, содержащий упругую систему с изменяемой жесткостью из двух скрепленных между собой металлических пластин с изгибными пьезокерамическими элементами (патент РФ №2309435).
Недостатком этого преобразователя является отсутствие возможности тонкой настройки резонансной частоты в исследуемой полосе частот и нелинейная зависимость амплитуды выходного сигнала пьезопреобразователя от амплитуды регистрируемых механических колебаний, обусловленная неравномерностью его изгиба вблизи основания упругой пластины.
Наиболее близким к заявляемому является резонансный сейсмоприемник, содержащий корпус, на основании которого расположен упругий элемент в виде металлической горизонтальной пластины (консоли), один конец которой зажат в опору, а на другом укреплена неподвижная инерционная масса. Вблизи опоры на упругой пластине расположен плоский чувствительный элемент в виде пьезоэлектрического преобразователя. Резонансная частота регулируется в нем за счет перемещения подвижной части инерционной массы вдоль упругого элемента (патент РФ №1679440).
Недостатком этого преобразователя является малая ширина исследуемой полосы частот и нелинейная зависимость амплитуды выходного сигнала пьезопреобразователя от амплитуды регистрируемых механических колебаний, обусловленная неравномерностью его изгиба вблизи основания упругой пластины.
Предлагаемый сейсмоприемник содержит корпус и упругий элемент в виде металлической пластины. Один конец пластины зажат в установленную в корпусе опору, а на другом укреплена инерционная масса в виде катушки из прочного легкого материала, например углепластика, с намотанной на нее проволокой из тяжелого материала, например вольфрама. В корпусе установлена вторая катушка с возможностью перематывания проволоки между катушками. Вращение на катушки передается сервоприводами от двух установленных в корпусе реверсивных моторов-генераторов, соединенных в общую электрическую цепь с возможностью согласованного переключения их из режима двигателя в режим генератора и обратно. При этом, когда первый из них находится в режиме двигателя (режим перематывания проволоки со второй катушки на первую), второй находится в режиме генератора и наоборот. Это предотвращает провисание проволоки при смене направления ее перематывания.
Перематывание проволоки между катушками приводит к изменению инерционной массы и, как следствие, эквивалентной массы упругой системы, что, в свою очередь, приводит к изменению резонансной частоты системы. Это обеспечивает возможность сканирования рабочей полосы частот. Принцип работы устройства сканирования основан на известном соотношении

где  - собственная частота упругой системы, СЭ - эквивалентная гибкость упругой системы, МЭ - эквивалентная масса колебательной системы, приблизительно равная инерционной массе. Выбор материалов катушки и проволоки соответственно из легкого и тяжелого материалов обусловлен необходимостью расширения диапазона изменения инерционной массы и, тем самым, расширения сканируемой полосы частот.
- собственная частота упругой системы, СЭ - эквивалентная гибкость упругой системы, МЭ - эквивалентная масса колебательной системы, приблизительно равная инерционной массе. Выбор материалов катушки и проволоки соответственно из легкого и тяжелого материалов обусловлен необходимостью расширения диапазона изменения инерционной массы и, тем самым, расширения сканируемой полосы частот.
Вблизи опоры на упругой пластине расположен плоский чувствительный элемент в виде биморфного пьезоэлектрического преобразователя прямоугольной формы. Выходной сигнал от преобразователя подается как на регистратор, так и на вход устройства сканирования, обеспечивая возможность регулирования скорости сканирования. Так, при приближении собственной частоты колебательной системы к частотам, присутствующим в спектре исследуемого объекта (о чем можно судить по возрастанию амплитуды сигнала на выходе преобразователя), предусмотрено уменьшение скорости сканирования (для повышения точности определения амплитуд регистрируемых пиков и соответствующих им частот), а в промежутках между пиками предусмотрено увеличение скорости сканирования (для уменьшения общего времени сканирования).
Для обеспечения линейной зависимости выходного сигнала преобразователя от амплитуды механических колебаний пластины и повышения ее долговременной прочности в месте соединения с опорой, упругая пластина в месте крепления биморфа выполнена в форме равнобедренной трапеции, большее основание которой зажато в опору. Геометрические размеры пластины подобраны так, чтобы радиус кривизны пластины при изгибных колебаниях была одинакова по всей длине биморфного элемента. Для выполнения этого требования необходимо, чтобы при колебаниях инерционной массы изгибающий момент, приходящийся на единицу ширины пластины, была постоянна на всем участке расположения биморфного элемента.
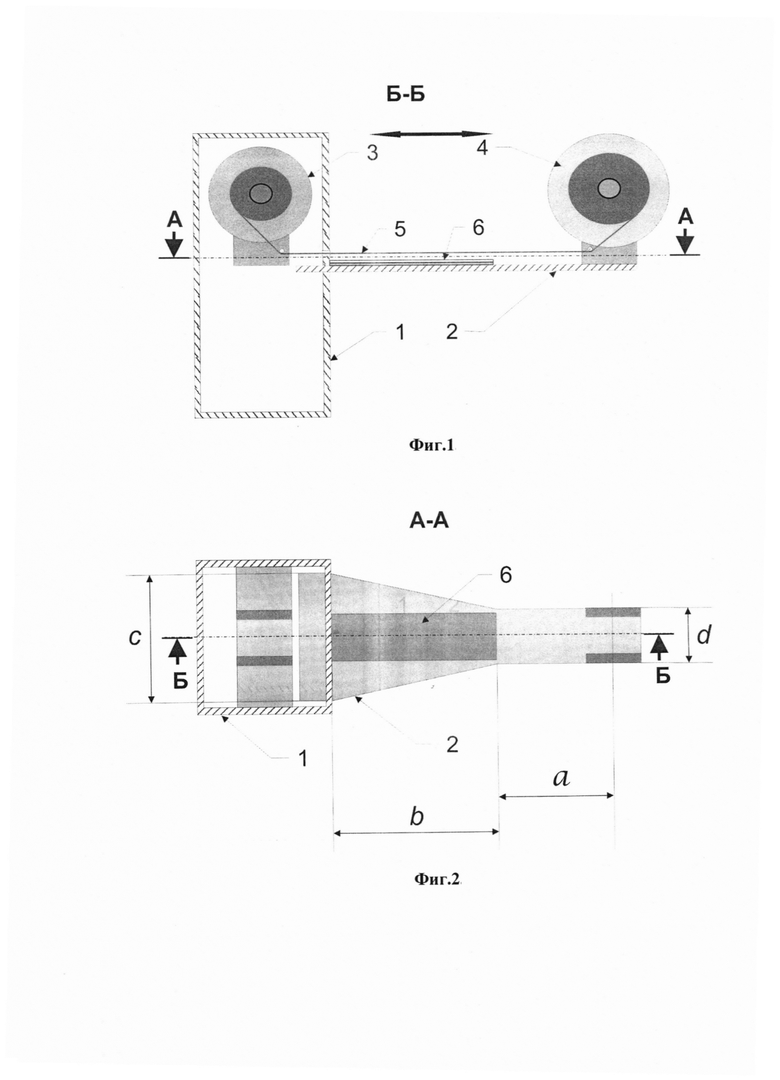
Введем обозначения: а - расстояние от места крепления инерционной массы до меньшего основания трапеции d, b - высота трапеции, с - большее основание трапеции, F - изгибающая сила. Тогда условие постоянства изгибающего момента приводит к соотношению

откуда

На фиг. 1 представлен вертикальный разрез сейсмоприемника.
В опору корпуса 1 зажат упругий элемент в виде металлической пластины 2, на свободном конце которой установлена инерционная масса в виде катушки из углепластика 4, на которую намотана вольфрамовая проволока 5 с возможностью ее перематывания на вторую катушку 3, установленную в корпусе. Вблизи опоры на упругую пластину наклеен плоский биморфный пьезоэлектрический элемент прямоугольной формы 6. Упругая пластина в месте крепления биморфа выполнена в форме равнобедренной трапеции с геометрическими размерами, указанными на фиг. 2.
Сейсмоприемник работает следующим образом. Колебания от исследуемого источника (земная кора или техногенный объект) передаются через корпус 1 на упругую пластину 2 с бимофным преобразователем 6. Выходной сигнал от преобразователя, пропорциональный амплитуде колебаний пластины, подается на регистратор (не показан) и на вход устройства (не показано), управляющего системой сканирования 3, 4, 5. Управление сканированием заключается в регулировании скорости сканирования в зависимости от величины выходного сигнала с преобразователя - при возрастании величины сигнала на выходе преобразователя, свидетельствующем о приближении собственной частоты колебательной системы к частотам, присутствующим в спектре исследуемого объекта, скорость сканирования уменьшается. Благодаря этому повышается точность определения амплитуд регистрируемых пиков и соответствующих им частот. В промежутках между пиками скорость сканирования увеличивается, уменьшая тем самым общее время сканирования.
Техническим результатом использования предлагаемого устройства является расширение полосы регистрируемых частот и точности их идентификации, обеспечение линейности зависимости амплитуд выходного сигнала преобразователя от амплитуд регистрируемых колебаний, повышение точности определения амплитуд.
| название | год | авторы | номер документа |
|---|---|---|---|
| Широкополосный резонансный сейсмоакустический приемник | 2016 |
|
RU2660768C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ИЗГИБНЫЙ ПРЕОБРАЗОВАТЕЛЬ С РЕГУЛИРУЕМОЙ РЕЗОНАНСНОЙ ЧАСТОТОЙ | 2006 |
|
RU2309435C1 |
| ДВУХКООРДИНАТНЫЙ СТРУННЫЙ НАКЛОНОМЕР | 2004 |
|
RU2287777C2 |
| Вертикальный сейсмоприемник | 1980 |
|
SU911406A1 |
| Сейсмоприемник | 1985 |
|
SU1343368A1 |
| Пьезоэлектрический сейсмоприемник | 1975 |
|
SU572733A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК УСКОРЕНИЯ | 2002 |
|
RU2212672C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОСТЕНД И ВИБРАТОР РЕЗОНАНСНОГО ТИПА | 2007 |
|
RU2334966C1 |
| Способ преобразования сейсмических сигналов и устройство для его реализации | 1976 |
|
SU623168A1 |
| БИМОРФНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СЕЙСМОПРИЕМНИК И СПОСОБ ПОЛУЧЕНИЯ ИДЕНТИЧНЫХ БИМОРФНЫХ ПЬЕЗОЭЛЕКТРИЧЕСКИХ СЕЙСМОПРИЕМНИКОВ | 1995 |
|
RU2119678C1 |
Изобретение относится к области геофизики и может быть использовано для регистрации механических колебаний, в частности высокочастотных сейсмических шумов (ВСШ) резонансным методом в широкой полосе частот. Предлагаемый сейсмоприемник содержит корпус и упругий элемент в виде металлической пластины. Один конец пластины зажат в установленную в корпусе опору, а на другом укреплена инерционная масса в виде катушки из прочного легкого материала, например углепластика, с намотанной на нее проволокой из тяжелого материала, например вольфрама. В корпусе установлена вторая катушка с возможностью перематывания проволоки между катушками. Вращение на катушки передается сервоприводами от двух установленных в корпусе реверсивных моторов-генераторов, соединенных в общую электрическую цепь с возможностью согласованного переключения их из режима двигателя в режим генератора и обратно. При этом, когда первый из них находится в режиме двигателя (режим перематывания проволоки со второй катушки на первую), второй находится в режиме генератора и наоборот. Это предотвращает провисание проволоки при смене направления ее перематывания. Перематывание проволоки между катушками приводит к изменению инерционной массы и, как следствие, к изменению резонансной частоты системы. Это обеспечивает возможность сканирования рабочей полосы частот. Выбор материалов катушки и проволоки соответственно из легкого и тяжелого материалов обусловлен необходимостью расширения диапазона изменения инерционной массы и, тем самым, расширения сканируемой полосы частот. Вблизи опоры на упругой пластине расположен плоский чувствительный элемент в виде биморфного пьезоэлектрического преобразователя прямоугольной формы. Выходной сигнал от преобразователя подается как в регистратор, так и на вход устройства сканирования, обеспечивая возможность регулирования скорости сканирования. Для обеспечения линейной зависимости выходного сигнала преобразователя от амплитуды механических колебаний пластины и повышения ее долговременной прочности в месте соединения с опорой упругая пластина в месте крепления биморфа выполнена в форме равнобедренной трапеции, большее основание которой зажато в опору. Геометрические размеры пластины подобраны так, чтобы выполнялось соотношение (а+b)d=ас, где а - расстояние от места крепления инерционной массы до меньшего основания трапеции d, b - высота трапеции, с - большее основание трапеции. Технический результат – расширение полосы регистрируемых частот и точности их идентификации, обеспечение линейности зависимости амплитуд выходного сигнала преобразователя от амплитуд регистрируемых колебаний, повышение точности определения амплитуд. 1 з.п. ф-лы, 2 ил.
1. Сейсмоприемник резонансный сканирующий, содержащий корпус и упругий элемент в виде металлической пластины (консоли), один конец которой зажат в установленную в корпусе опору, на другом укреплена инерционная масса, а вблизи опоры на упругой пластине расположен плоский чувствительный элемент в виде пьезоэлектрического преобразователя, отличающийся тем, что инерционная масса выполнена в виде катушки из прочного легкого материала с намотанной на нее проволокой из тяжелого материала с возможностью ее перематывания на вторую катушку, установленную в корпусе, и обратно, при этом пьезоэлектрический преобразователь выполнен в виде биморфа прямоугольной формы, прикрепленного к упругой пластине, выполненной в месте крепления биморфа в форме равнобедренной трапеции, большее основание которой зажато в опору, причем геометрические размеры упругого элемента находятся в соотношении (а+b)d=ас, где а - расстояние от места крепления инерционной массы до меньшего основания трапеции d, b - высота трапеции, с - большее основание трапеции.
2. Сейсмоприемник резонансный сканирующий по п. 1, отличающийся тем, что первая и вторая катушки соединены сервоприводами соответственно с первым и вторым реверсивными моторами-генераторами, установленными на опоре и соединенными в общую электрическую цепь с возможностью согласованного переключения их из режима двигателя в режим генератора и обратно, при этом, когда первый из них находится в режиме двигателя, второй находится в режиме генератора и наоборот.
| Резонансный сейсмоприемник | 1989 |
|
SU1679440A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ИЗГИБНЫЙ ПРЕОБРАЗОВАТЕЛЬ С РЕГУЛИРУЕМОЙ РЕЗОНАНСНОЙ ЧАСТОТОЙ | 2006 |
|
RU2309435C1 |
| Вертикальный сейсмоприемник | 1980 |
|
SU911406A1 |
| DE 19800870 A1, 20.08.1998 | |||
| Сейсмоприемник | 1985 |
|
SU1343368A1 |
| КОРМОРАЗДАТЧИК-ДОЗАТОР | 2000 |
|
RU2170008C1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |

