Изобретение относится к приборостроению, например, в области геофизики и может быть использовано для регистрации механических колебаний, в частности высокочастотных сейсмических шумов (ВСШ), резонансным методом в широкой полосе частот.
Известен резонансный сейсмоприемник, содержащий корпус, на основании которого расположен упругий элемент в виде металлической горизонтальной пластины (консоли), один конец которой зажат в опору, а на другом укреплена неподвижная инерционная масса. Вблизи опоры на упругой пластине расположен плоский чувствительный элемент в виде пьезоэлектрического преобразователя. Резонансная частота регулируется в нем за счет перемещения подвижной части инерционной массы вдоль упругого элемента [1].
Недостатком этого преобразователя является малая ширина исследуемой полосы частот и нелинейная зависимость амплитуды выходного сигнала пьезопреобразователя от амплитуды регистрируемых механических колебаний, обусловленная неравномерностью его изгиба вблизи основания упругой пластины.
Наиболее близким к заявляемому является преобразователь механических колебаний с регулируемой резонансной частотой, содержащий упругую систему с изменяемой жесткостью из двух скрепленных между собой металлических пластин с изгибными пьезокерамическими элементами [2].
Недостатком этого преобразователя является отсутствие возможности тонкой настройки резонансной частоты в исследуемой полосе частот и нелинейная зависимость амплитуды выходного сигнала пьезопреобразователя от амплитуды регистрируемых механических колебаний, обусловленная неравномерностью его изгиба вблизи основания упругой пластины.
Предлагаемый широкополосный резонансный сейсмоакустический приемник (далее «Сейсмоакустический приемник») содержит корпус и установленные в нем две упругие пластины консольного типа с биморфными преобразователями, на свободных концах которых укреплены инерционные массы в виде двух катушек переменной массы из прочного легкого материала, например углепластика. На катушки намотана одна общая проволока из тяжелого материала, например вольфрама, с возможностью ее перематывания между катушками. Перематывание проволоки между катушками приводит к изменению их инерционных масс и, как следствие, к изменению резонансных частот упругих пластин. Это позволит сканировать рабочую полосу частот, для чего в корпусе установлены два реверсивных мотор-генератора, каждый из которых соединен гибким приводом соответственно с первой и второй катушками. Они включены в общую электрическую цепь с возможностью согласованного попеременного переключения их из режима двигателя в режим генератора и обратно. При этом, когда первый из них находится в режиме двигателя (режим перематывания проволоки со второй катушки на первую), второй находится в режиме генератора, и наоборот. Это предотвращает провисание проволоки при смене направления ее перематывания. Материал и геометрические размеры упругих пластин подобраны так, чтобы при перематывании проволоки между катушками их собственные частоты изменялись в смежных диапазонах. Это расширяет сканируемую полосу частот.
Вблизи опоры на упругой пластине расположен плоский чувствительный элемент в виде биморфного пьезоэлектрического преобразователя прямоугольной формы. Выходной сигнал от преобразователя подается как в регистратор, так и на вход устройства сканирования, обеспечивая возможность регулирования скорости сканирования. Для обеспечения линейной зависимости выходного сигнала преобразователя от амплитуды механических колебаний пластины упругая пластина в месте расположения биморфа выполнена в форме равнобедренной трапеции, большее основание которой зажато в опору, а геометрические размеры пластины подобраны так, чтобы выполнялось соотношение (а+b)d=ас, где а - расстояние от места крепления инерционной массы до меньшего основания трапеции d, b - высота трапеции, с - большее основание трапеции.
Принцип сканирования для каждой из упругих консольных пластин основан на известном соотношении

где ƒ - собственная частота поперечных колебаний консоли, m - инерционная масса (массой пластины пренебрегаем), С - гибкость консольной пластины, определяемая, в свою очередь, по формуле [3]

где  - расстояние от места защемления консоли до точки закрепления инерционной массы (масса самой консоли мала), Е - модуль упругости материала консоли на изгиб, J - момент инерции сечения консоли. После подстановки, получим
- расстояние от места защемления консоли до точки закрепления инерционной массы (масса самой консоли мала), Е - модуль упругости материала консоли на изгиб, J - момент инерции сечения консоли. После подстановки, получим

При этом для консоли постоянной ширины и прямоугольного сечения [3]

где с - ширина консоли, h - ее толщина. Для консольной пластины переменной ширины сx и постоянной толщины h эта формула имеет вид

где Jx и сx - локальные значения соответственно момента инерции сечения и ширины пластины.
Выбор материалов катушки и проволоки соответственно из легкого и тяжелого материалов обусловлен необходимостью расширения диапазона изменения инерционной массы и тем самым расширения сканируемой полосы частот, а также уменьшения массы и габаритов сейсмоакустического приемника.
Вблизи опоры на упругой пластине расположен плоский чувствительный элемент в виде биморфного пьезоэлектрического преобразователя прямоугольной формы. Выходной сигнал от преобразователя подается как на регистратор, так и на вход устройства сканирования, обеспечивая возможность автоматического регулирования направления и скорости сканирования. Так, при приближении собственной частоты колебательной системы к частотам, присутствующим в спектре исследуемого объекта (о чем можно судить по возрастанию амплитуды сигнала на выходе преобразователя), предусмотрено уменьшение скорости сканирования (для повышения точности определения амплитуд регистрируемых пиков и соответствующих им частот), а в промежутках между пиками предусмотрено увеличение скорости сканирования (для уменьшения общего времени сканирования).
Для обеспечения линейной зависимости выходного сигнала преобразователя от амплитуды механических колебаний пластины ее геометрические размеры подобраны так, чтобы радиус кривизны ρx (или кривизна 1/ρx) пластины при изгибных колебаниях был одинаков по всей длине биморфного элемента. Возможность выполнения этих требований вытекает из известного соотношения [3]

где  - изгибающий момент на расстоянии
- изгибающий момент на расстоянии  (вдоль оси консоли x) от точки приложения изгибающей силы F, ρx и Jx - соответствующие Мx радиус кривизны пластины и момент инерции сечения. Подставляя значение Jx из (5), получаем соотношение
(вдоль оси консоли x) от точки приложения изгибающей силы F, ρx и Jx - соответствующие Мx радиус кривизны пластины и момент инерции сечения. Подставляя значение Jx из (5), получаем соотношение

из которого следует, что для постоянства ρx необходимо, чтобы при колебаниях инерционной массы изгибающий момент, приходящийся на единицу ширины пластины  , был постоянен. Поскольку F также постоянна по всей длине консоли [3], то условие постоянства ρx сводится к геометрическому соотношению
, был постоянен. Поскольку F также постоянна по всей длине консоли [3], то условие постоянства ρx сводится к геометрическому соотношению

которое выполняется, если консольная пластина имеет форму равнобедренного треугольника с вершиной в точке крепления инерционной массы.
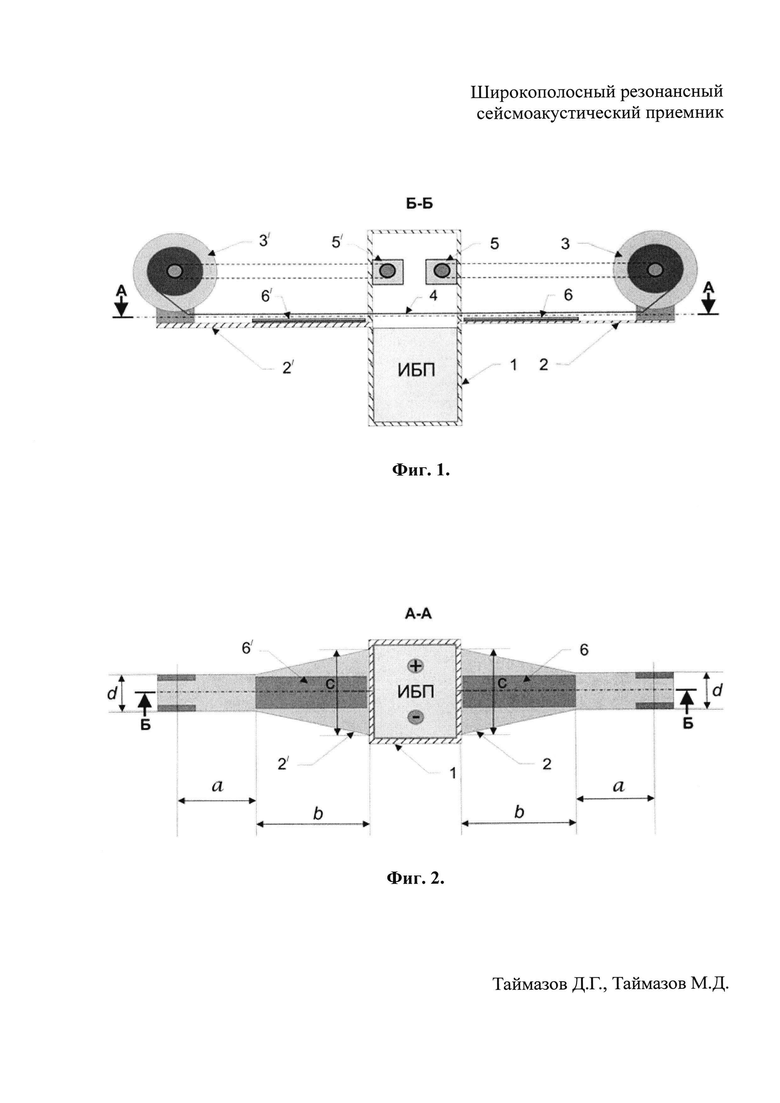
На фиг. 1 представлен вертикальный разрез предлагаемого сейсмоакустического приемника.
В опору корпуса 1 зажаты упругие элементы в виде консольных пластин 2 и 2', на свободных концах которых установлены инерционные массы в виде катушек из углепластика 3 и 3', на которых намотана одна общая вольфрамовая проволока 4 с возможностью ее перематывания между ними. Вращение на катушки передается от установленных в корпусе мотор-генераторов 5 и 5', соединенных с катушками гибкими приводами-пассиками (показаны штриховыми линиями). Вблизи опор на упругие пластины наклеены плоские биморфные пьезоэлектрические элементы прямоугольной формы 6 и 6'. Упругие пластины в месте расположения биморфа выполнены в форме равнобедренных трапеций с геометрическими размерами, указанными на фиг. 2. Для выполнения условия (6) продолжения боковых сторон трапеций должны пересекаться в точках крепления инерционных масс 3 и 3'. При этом справедлива пропорция

откуда вытекает условие постоянства изгибающего момента в виде

где а - расстояние от места крепления инерционной массы до меньшего основания трапеции d, b - высота трапеции, с - большее основание трапеции.
Предлагаемый сейсмоакустический приемник работает следующим образом. Колебания от исследуемого источника (земная кора, техногенный объект или узлы и агрегаты машин и механизмов) передаются через корпус 1 на упругие пластины 2 и 2' с биморфными преобразователями 6 и 6'. Выходные сигналы от преобразователей, пропорциональные амплитудам колебаний пластин, подаются на регистратор (не показан) и на вход устройства (не показано), управляющего системой сканирования 3, 3', 4, 5, 5'. Управление сканированием заключается в регулировании скорости сканирования в зависимости от величины выходного сигнала с преобразователя - при возрастании величины сигнала на выходе преобразователя, свидетельствующем о приближении собственной частоты колебательной системы к частотам, присутствующим в спектре исследуемого объекта, скорость сканирования уменьшается. Благодаря этому повышается точность определения амплитуд регистрируемых пиков и соответствующих им частот. В промежутках между пиками скорость сканирования увеличивается, уменьшая тем самым общее время сканирования.
Для количественной оценки разных вариантов реализации предлагаемого сейсмоакустического приемника введем коэффициент эффективности системы сканирования η, определяемый как отношение ширины сканируемой полосы частот Δƒ к диапазону изменения массы перематываемой проволоки Δm, т.е. η=Δƒ/Δm. Если, к примеру, начальная инерционная масса колебательной системы в датчике с одной консольной пластиной составляет 5 граммов (масса катушки из углепластика + эквивалентная масса упругой пластины), а требуемый сканируемый диапазон частот составляет от 5 Гц до 100 Гц, то рассчитанный по формуле (3) диапазон изменения инерционной массы (масса перематываемой проволоки) составляет 2000 г, а коэффициент эффективности сканирования составит η=Δƒ/Δm=95/2000≈0,05 Гц/г.
В предлагаемом сейсмоакустическом приемнике с двумя консольными пластинами при тех же пороговых значениях инерционной массы (5 г) и диапазоне частот 5÷100 Гц диапазон сканирования делится на 2 поддиапазона - от 5 до ~22 Гц и от 22 до 100 Гц. При этом необходимая масса проволоки Δm составляет ~100 г, т.е. в 20 раз меньше, чем в первом варианте. Для обеспечения диапазона сканирования 5÷200 Гц вес проволоки Δm должен составлять ~250 г, что для вольфрамовой проволоки соответствует объему в ~13 см3. При этом собственные частоты консолей будут изменяться в пределах частично перекрывающихся поддиапазонов 5÷35 Гц (на фиг. 1 - правая консоль) и 30÷210 Гц (левая консоль). Для этого, как следует из формулы (3), при одинаковых прочих геометрических размерах упругих пластин, толщина левой консольной пластины на фиг. 1 должна быть в ~3,7 раза больше, чем правой. Коэффициент эффективности сканирования при этом составит η=210/250=0,84 Гц/г, что в ~17 раз больше, чем в первом варианте. В этом варианте исполнения предлагаемое устройство может быть использовано как для наблюдения за ВСШ, так и для инженерного контроля над крупными сооружениями: зданиями, ГЭС, АЭС и т.д.
Сканируемый частотный диапазон в предлагаемом сейсмоакустическом приемнике может быть расширен практически неограниченно путем установления в корпусе дополнительных пар сейсмоакустических приемников, аналогичных описанным выше, с примыкающими друг к другу частотными диапазонами, включая и звуковой диапазон. Так, при двух парах сейсмоакустических приемников общий частотный диапазон, согласно расчетам по вышеприведенным формулам, может, к примеру, составить 1÷1020 Гц и состоять из 4-х частично перекрывающихся поддиапазонов: 1÷6 Гц; 5,5÷33 Гц; 30÷180 Гц; 170÷1020 Гц. При этом для настройки каждого поддиапазона путем изменения жесткости упругой пластины может быть изменена не только ее толщина, но и ширина и длина. Общая масса проволоки в этом варианте составит 2×180 г=360 г, что для вольфрамовой проволоки соответствует объему в ~20 см3. Сравнивая эти данные с таковыми для одной пары упругих консольных пластин, констатируем увеличение в 5 раз частотного диапазона сканирования без существенного увеличения массы и габаритов устройства. При этом коэффициент эффективности сканирования составит η=1020/360=2,83 Гц/г и более чем в 3 раза больше, чем в случае одной пары консольных пластин. Расширяется также область использования приемника. Помимо перечисленных ранее назначений (наблюдения ВСШ, инженерный контроль над крупными сооружениями: зданиями, ГЭС, АЭС), он может быть использован также для акустического контроля узлов и агрегатов машин, для акустического каротажа скважин, для детектирования сверхслабых (до 10-12 м по смещению) сейсмоакустических сигналов в твердых и жидких средах.
Таким образом, ожидаемым техническим результатом использования предлагаемого сейсмоакустического приемника является многократное увеличение эффективности сканирования, позволяющее существенно увеличить частотный диапазон сканирования при одновременном уменьшении массы и габаритов устройства.
Источники информации
1. Хаврошкин О.Б., Башилов И.П. А.с. СССР №1679440 (SU 1679440). Резонансный сейсмоприемник // БИ, 1991. №35.
2. Голицын В.Ю., Медведев А.Б., Чаплыгин А.А. Патент РФ №2309435 (RU 2309435). Пьезометрический изгибный преобразователь с регулируемой резонансной частотой // БИ, 2007. №30.
3. Феодосьев В.И. Сопротивление материалов. - М.: Изд-во МГТУ им. Н.Э. Баумана, 1999. - 592 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОПРИЕМНИК РЕЗОНАНСНЫЙ СКАНИРУЮЩИЙ | 2016 |
|
RU2635399C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК УСКОРЕНИЯ | 2002 |
|
RU2212672C1 |
| ДВУХКООРДИНАТНЫЙ СТРУННЫЙ НАКЛОНОМЕР | 2004 |
|
RU2287777C2 |
| Пьезоэлектрический сейсмоприемник | 1975 |
|
SU572733A1 |
| ГРАДИЕНТОМЕТР | 2019 |
|
RU2724461C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ИЗГИБНЫЙ ПРЕОБРАЗОВАТЕЛЬ С РЕГУЛИРУЕМОЙ РЕЗОНАНСНОЙ ЧАСТОТОЙ | 2006 |
|
RU2309435C1 |
| Пьезоэлектрический преобразователь кантилеверного типа механической энергии в электрическую | 2015 |
|
RU2623445C1 |
| Оптический дефлектор | 1988 |
|
SU1550458A1 |
| Сейсмоприемник | 1985 |
|
SU1343368A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОСТЕНД И ВИБРАТОР РЕЗОНАНСНОГО ТИПА | 2007 |
|
RU2334966C1 |
Изобретение относится к приборостроению и может быть использовано как в области геофизики для регистрации высокочастотных сейсмических шумов и акустического каротажа скважин, так и для инженерного контроля над крупными сооружениями, а также узлами и агрегатами машин и механизмов. Предлагаемый сейсмоакустический приемник содержит корпус и установленные в нем две упругие пластины консольного типа с биморфными преобразователями, на свободных концах которых укреплены инерционные массы в виде двух катушек переменной массы из прочного легкого материала, например углепластика. На катушки намотана одна общая проволока из тяжелого материала, например вольфрама, с возможностью ее перематывания между катушками. Перематывание проволоки между катушками приводит к изменению их инерционных масс и, как следствие, к изменению резонансных частот упругих пластин. Это позволит сканировать рабочую полосу частот, для чего в корпусе установлены два реверсивных мотор-генератора, каждый из которых соединен гибким приводом соответственно с первой и второй катушками. Они включены в общую электрическую цепь с возможностью согласованного попеременного переключения их из режима двигателя в режим генератора и обратно. Материал и геометрические размеры упругих пластин подобраны так, чтобы при перематывании проволоки между катушками их собственные частоты изменялись в смежных диапазонах частот. Вблизи опоры на каждой упругой пластине расположен плоский чувствительный элемент в виде биморфного пьезоэлектрического преобразователя прямоугольной формы. Для обеспечения линейной зависимости выходного сигнала преобразователя от амплитуды механических колебаний пластины, упругая пластина в месте расположения биморфа выполнена в форме равнобедренной трапеции, большее основание которой зажато в опору, а геометрические размеры пластины подобраны так, чтобы выполнялось соотношение (а+b)d=ас, где а - расстояние от места крепления инерционной массы до меньшего основания трапеции d, b - высота трапеции, с - большее основание трапеции. Технический результат – многократное увеличение эффективности сканирования, позволяющее существенно увеличить частотный диапазон сканирования при одновременном уменьшении массы и габаритов устройства. 3 з.п. ф-лы, 2 ил.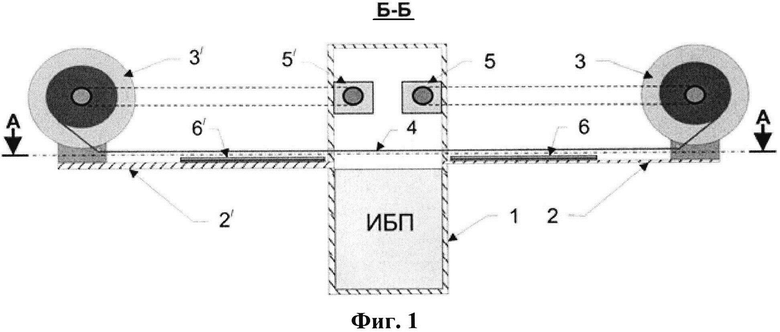
1. Широкополосный резонансный сейсмоакустический приемник, содержащий корпус и установленные в нем две упругие пластины с наклеенными на них биморфными пьезоэлектрическими преобразователями, отличающийся тем, что одни концы упругих пластинок закреплены на установленной в корпусе опоре, а на их свободных концах укреплены инерционные массы в виде первой и второй катушек из прочного легкого материала, на которые намотана одна общая проволока из тяжелого материала с возможностью ее перематывания между катушками, при этом материал и геометрические размеры упругих пластин подобраны так, чтобы при перематывании проволоки между катушками их собственные частоты изменялись в смежных диапазонах частот.
2. Широкополосный резонансный сейсмоакустический приемник по п. 1, отличающийся тем, что первая и вторая катушки соединены сервоприводами соответственно с первым и вторым реверсивными мотор-генераторами, установленными на опоре и соединенными в общую электрическую цепь с возможностью согласованного переключения их из режима двигателя в режим генератора и обратно, при этом, когда первый из них находится в режиме двигателя, второй находится в режиме генератора, и наоборот.
3. Широкополосный резонансный сейсмоакустический приемник по п. 1, отличающийся тем, что биморфные пьезоэлектрические преобразователи имеют прямоугольные формы, а каждая упругая пластина в месте расположения биморфа выполнена в форме равнобедренной трапеции, большее основание которой закреплено на опоре, причем ее геометрические размеры находятся в соотношении (а+b)d=ас, где а - расстояние от места крепления инерционной массы до меньшего основания трапеции d, b - высота трапеции, с - большее основание трапеции.
4. Широкополосный резонансный сейсмоакустический приемник по п. 1, отличающийся тем, что катушки выполнены из углепластика, а проволока - из вольфрама.
| Резонансный сейсмоприемник | 1989 |
|
SU1679440A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ИЗГИБНЫЙ ПРЕОБРАЗОВАТЕЛЬ С РЕГУЛИРУЕМОЙ РЕЗОНАНСНОЙ ЧАСТОТОЙ | 2006 |
|
RU2309435C1 |
| Вертикальный сейсмоприемник | 1980 |
|
SU911406A1 |
| DE 19800870 A1, 20.08.1998 | |||
| Сейсмоприемник | 1985 |
|
SU1343368A1 |
| КОРМОРАЗДАТЧИК-ДОЗАТОР | 2000 |
|
RU2170008C1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |

