Изобретение относится к электротехнике и может быть использовано для управления приводными электромагнитами коммутационных аппаратов.
Известно устройство управления электромагнитом [1], которое используется для форсировки приводных электромагнитов коммутационных аппаратов, а также для управления электромагнитами различных устройств автоматики, питающихся от источника постоянного напряжения. В устройство введены элементы логических функций повторения, эквивалентности, И, последовательная R-C цепь формирования длительности первой паузы напряжения на обмотке, блок стабилизации мощности тепловых потерь в обмотке электромагнита в режиме удержания, состоящий из входного резистивного делителя напряжения и выходной его цепи, содержащей МОП-транзистор, резистор, диод, причем вход повторителя подключен к общей точке соединения резистора и конденсатора R-C цепи, задающей длительность форсирующего импульса включения электромагнита, и к второму диоду, а выход повторителя соединен с входом элемента эквивалентности через резистор последовательной R-C цепи формирования длительности первой паузы напряжения на обмотке, с входом элемента эквивалентности, с входом блокировки генератора прямоугольных импульсов. Выход элемента эквивалентности соединен с первым входом логического элемента И, второй вход которого подсоединен к выходу генератора прямоугольных импульсов с подключенным резистором задающей его R-C цепи, выход элемента И соединен с электродом управления транзисторного ключа, выходная цепь блока стабилизации мощности тепловых потерь в обмотке электромагнита в режиме удержания включена параллельно резистору задающей R-C цепи генератора прямоугольных импульсов. При использовании такого устройства снижается мощность тепловых потерь в обмотке электромагнита и увеличивается срок службы. Однако оно не обеспечивает эффективного управления в широком диапазоне изменения напряжения питания динамическими параметрами электромагнита при его срабатывании из-за несогласованности переходного процесса изменения тока в обмотке электромагнита с алгоритмом управления по причине независимости длительности первой паузы от напряжения питания.
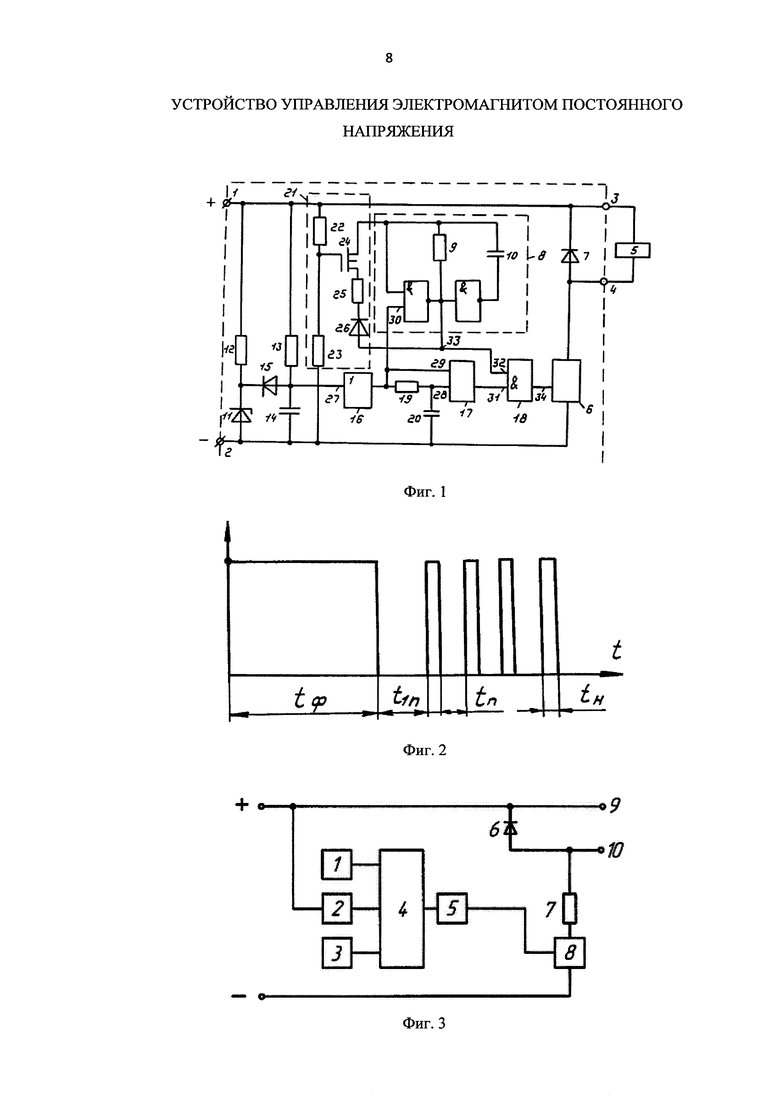
Наиболее близким по технической сущности и достигаемому результату к заявляемому изобретению является устройство форсированного управления электромагнитом постоянного напряжения [2], принятое за прототип. Устройство содержит генератор 1 источник тока 2, зависимый от уровня напряжения источника питания таймер 3, выходы которых подключены к входу интегратора 4 с двумя ступенями постоянной интегрирования; источник тока 2 соединен с источником питания, выход интегратора 4 подсоединен к входу компаратора с внутренним опорным напряжением 5, выход которого подключен к управляющему входу транзисторного ключа 8, первый силовой вывод которого подсоединен к отрицательной шине источника питания, второй силовой вывод транзисторного ключа подключен к первому выводу токоограничивающего резистора 7, второй вывод которого подсоединен к аноду защитного диода 6, катод защитного диода подсоединен к положительной шине источника питания, выводы 9, 10 для подключения обмотки электромагнита подсоединены к аноду и катоду защитного диода 6.
Недостатком устройства является неэффективное в широком диапазоне изменение напряжения питания динамическими параметрами электромагнита при его срабатывании из-за несогласованности переходного процесса изменения тока в обмотке электромагнита с алгоритмом управления по причине постоянства длительности пускового периода (форсировки), задаваемого таймером. Кроме того, применение в устройстве широтно-импульсной модуляции напряжения питания в период трогания электромагнита снижает его быстродействие.
Первый недостаток определяется тем, что при увеличении напряжения питания время переходного процесса уменьшается, а при уменьшении напряжения питания - увеличивается. При этом, если длительность пускового периода достаточна для надежного срабатывания электромагнита при минимальном напряжении, то при максимальном напряжении в течение времени форсировки электромагнит будет потреблять неоправданно большую мощность и это может привести к перегреву обмотки, особенно при работе в повторно-кратковременном режиме. Если время форсировки выбрать из условия обеспечения срабатывания при максимальном напряжения питания, то при пониженном напряжении электромагнит может не сработать вообще.
Второй недостаток определяется тем, что применение широтно-импульсной модуляции в течение всего периода срабатывания приводит к уменьшению среднего напряжения на обмотке по сравнению с номинальным напряжением, вследствие чего время срабатывания будет больше, чем без широтно-импульсной модуляции.
Техническим результатом изобретения является улучшение качества управления приводным электромагнитом в широком диапазоне изменения напряжения питания путем формирования в процессе управления широтно-импульсной модуляции со скважностью, необходимой для достаточного торможения якоря и снижения кинетической энергии подвижных частей к моменту соударения главных контактов на второй ступени управления и, как следствие, повышение быстродействия, увеличение срока службы электромагнита и приводимых им в движение главных контактов.
Этот технический результат достигается тем, что в устройстве управления электромагнитами постоянного напряжения, содержащем первую и вторую клеммы питания, связанные соответственно с положительным и отрицательным полюсами источника постоянного напряжения, две клеммы для подсоединения обмотки электромагнита, одна из которых соединена с резистором, диод, полупроводниковый ключ, в соответствии с заявляемым изобретением, второй вывод резистора подключен ко второй клемме питания и к аноду диода, другая клемма для подсоединения обмотки электромагнита соединена с катодом диода и через полупроводниковый ключ с первой клеммой питания, причем устройство дополнительно содержит микроконтроллер с аналогоцифровым преобразователем, аналоговыми и дискретными входами, дискретным выходом, первый аналоговый вход которого подключен к выводу резистора, соединенного с клеммой для подсоединения обмотки электромагнита, стабилизированный блок для питания микроконтроллера, резистивный делитель, соединенный с вторым аналоговым входом микроконтроллера для стабилизации мощности тепловых потерь в обмотке электромагнита в режиме удержания при изменении напряжения питания, дискретный выход микроконтроллера соединен с полупроводниковым ключом.
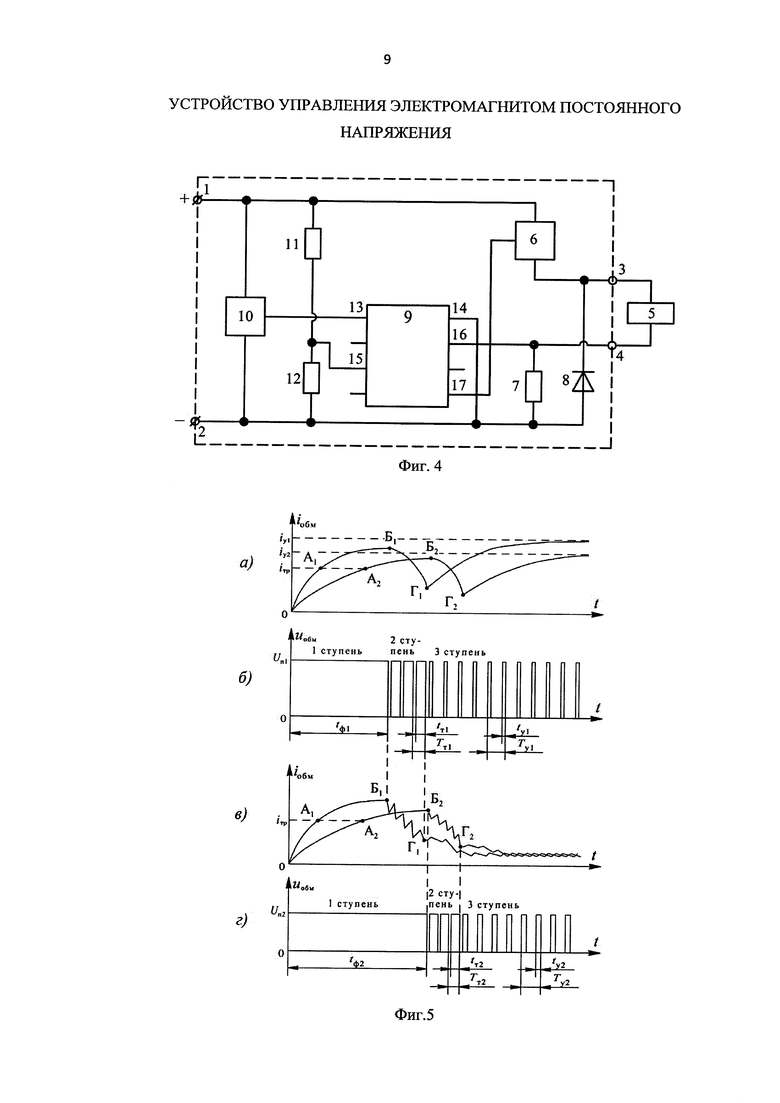
На фиг. 4 изображено заявляемое устройство управления электромагнитом; на фиг. 5 - временные диаграммы изменения тока в обмотке электромагнита и напряжения на обмотке: фиг. 5а - временные диаграммы изменения тока в процессе срабатывания электромагнита при повышенном напряжении питания uп1 (кривая О-А1-Б1-Г1) и пониженном напряжении питания uп2 кривая (О-А2-Б2-Г2) без применения широтно-импульсной модуляции напряжения питания; фиг. 5в - временные диаграммы изменения тока в процессе срабатывания электромагнита при повышенном напряжении питания uп1 (кривая О-А1-Б1-Г1) и пониженном напряжении питания uп2 кривая (О-А2-Б2-Г2) по трехступенчатому алгоритму управления с применением широтно-импульсной модуляции на второй и третьей ступенях управления; фиг. 5б и 5г - временные диаграммы изменения напряжения по трехступенчатому алгоритму управления соответственно при повышенном и пониженном напряжении питания.
Срабатывание электромагнита при отсутствии широтно-импульсной модуляции напряжения питания, как правило, сопровождается сильным ударом в момент соприкосновения подвижных и неподвижных контактов, приводящим к вибрациям контактов, что, в свою очередь, приводит к повышенному их износу. В то же время, как видно из временных диаграмм на фиг. 5а, уменьшение напряжения питания приводит к уменьшению тока в обмотке и затягиванию процесса срабатывания. При этом диаграмма изменения тока смещается вправо и идет несколько ниже, чем при повышенном напряжении питания. Соответственно все характерные точки диаграммы: точка А, характеризующая момент трогания якоря; точка Б, характеризующая момент достижения током максимального в период движения якоря значения; точка Г, характеризующая в момент окончания движения якоря достижение током минимального значения смещаются вправо. Заявляемое устройство реагирует на экстремальные значения токов в точках Б и Г независимо от напряжения питания, тем самым происходит синхронизация процесса изменения тока в обмотке с процессом формирования алгоритма управления и процесс становится управляемым.
Устройство содержит первую 1 и вторую 2 клеммы питания, соединенные соответственно с положительным и отрицательным полюсами источника постоянного напряжения, две клеммы 3 и 4 для подключения обмотки 5 электромагнита, одна из которых соединена с резистором 7 и с аналоговым входом 16 микроконтроллера 9, второй вывод резистора 7 подключен к второй 2 клемме питания и аноду диода 8, катод которого подключен к другой клемме для подключения обмотки и через полупроводниковый ключ 6 к первой 1 клемме питания, микроконтроллер 9, программируемый в соответствии с необходимым алгоритмом управления для формирования управляющих импульсов заданной длительности и скважности, включающий аналогоцифровой(???) преобразователь, аналоговые 15, 16 и дискретные (не используются) входы, дискретный выход 17, стабилизированный блок 10 для питания микроконтроллера через его выводы 13 и 14, резистивный делитель R(11)-R(12), соединенный с аналоговым входом 15 микроконтроллера 9 для стабилизации мощности тепловых потерь в обмотке электромагнита при изменении напряжения питания в режиме удержания якоря.
Устройство работает следующим образом. При подаче повышенного напряжения питания uп1 на клеммы 1 и 2 устройства начинается первая ступень управления, в течение времени tф1 которой полупроводниковый ключ 6, управляемый дискретным выводом 17 микроконтроллера 9, постоянно открыт для обеспечения максимального быстродействия. Характерные точки на фиг. 5в обозначены А1, Б1, Г1. По цепи, состоящей из обмотки 5, подсоединенной к устройству через выводы 3, 4 и резистора 7, протекает ток, который создает пропорциональное ему падение напряжения на резисторе 7. Напряжение с резистора 7, приложенное к аналоговому входу 16 микроконтроллера 9 независимо от состояния полупроводникового ключа 6, обеспечивает синхронизацию процесса изменения тока с процессом формирования управляющего алгоритма, временная диаграмма которого представлена на фиг. 5б. Как следует из фиг. 5в величина тока в точке A1 достигает значения тока трогания, при этом электромагнитное усилие превышает противодействующее и якорь (на схеме не показан) приводится в движение под действием разности электромагнитной и противодействующей сил. В результате движения якоря и механически связанных с ним подвижных контактов скорость изменения тока в обмотке электромагнита 5 уменьшается и становится равной нулю - точка Б1 на диаграмме. Питающийся от стабилизированного блока 10 микроконтроллер 9, реагируя на экстремум тока, начинает формировать управляющие импульсы, которые с его выхода 17 поступают на полупроводниковый ключ 6, обеспечивая широтно-импульсную модуляцию напряжения на обмотке и, как следствие, приводит к уменьшению тока в обмотке. Длительность tт1 и скважность которых задаются программно и зависят от массы подвижных частей аппарата и скорости их движения, обеспечивая оптимальное управление на второй ступени. Непрерывность протекания тока в обмотке 5 и резисторе 7 обеспечивается диодом 8, который в открытом состоянии полупроводникового ключа 6 закрыт и протекание тока в обмотке 5 происходит от источника питания. В закрытом состоянии полупроводникового ключа 6 диод 8 открывается электродвижущей силой самоиндукции обмотки 5 и ток в ней, не изменяя направление, поддерживается за счет действия этой силы. При этом происходит торможение якоря и механически связанных с ним подвижных контактов. Их кинетическая энергия уменьшается до значения, при котором происходит безвибрационное соударение подвижных и неподвижных контактов, что уменьшает их износ и повышает ресурс. В момент остановки якоря (этому соответствует точка Г1 на фиг. 5в) микроконтроллер 9, реагируя на экстремум тока, начинает контролировать напряжение с резистивного делителя R(11)-R(12) и включает третью ступень управления. При этом длительность ty1 удерживающих импульсов с дискретного выхода 17 зависит от напряжения питания. Происходит широтно-импульсная модуляция напряжения на обмотке 5, обеспечивая постоянство мощности тепловых потерь в обмотке 5 при изменении напряжения питания в режиме удержания, что обеспечивается посредством подачи на аналоговый вход 15 микроконтроллера 9 напряжения с резистивного делителя R(11)-R(12), которое пропорционально напряжению питания. При подаче пониженного напряжения питания процессы изменения тока и формирования управляющего алгоритма, временная диаграмма которого представлена на фиг. 5г, протекают аналогично за счет реагирования микроконтроллера 9 на токи в обмотке 5, соответствующие точкам Б2 и Г2.
Таким образом, в заявляемом устройстве процессы изменения тока и формирования управляющего алгоритма синхронизированы.
Источники информации
1. Пат. РФ №2187161. Устройство управления электромагнитом. Опубл. 10.08.2002.
2. Пат. РФ №2310938. Устройство форсированного управления электромагнитом постоянного тока. Опубл. 20.11.2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микропроцессорное устройство диагностики межвитковой изоляции электродвигателя по ЭДС самоиндукции с функцией мегомметра | 2017 |
|
RU2650082C1 |
| Устройство диагностики межвитковой изоляции электродвигателя по ЭДС самоиндукции с функцией мегомметра | 2018 |
|
RU2684955C9 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВРЕМЕНИ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773298C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2783869C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТОМ | 1999 |
|
RU2187161C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746039C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2756292C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ С УРАВНОВЕШИВАНИЕМ РЕЗИСТИВНОГО МОСТА УИТСТОНА МЕТОДОМ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ | 2012 |
|
RU2515309C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2747003C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2793305C1 |
Изобретение относится к электротехнике и может быть использовано для управления приводными электромагнитами коммутационных аппаратов. Техническим результатом изобретения является повышение быстродействия, увеличение срока службы электромагнита и приводимых им в движение главных контактов. Этот технический результат достигается тем, что в устройстве управления электромагнитами постоянного напряжения, содержащем первую и вторую клеммы питания, связанные соответственно с положительным и отрицательным полюсами источника постоянного напряжения, две клеммы для подсоединения обмотки электромагнита, одна из которых соединена с резистором, диод, полупроводниковый ключ, в соответствии с заявляемым изобретением, второй вывод резистора подключен ко второй клемме питания и к аноду диода, другая клемма для подсоединения обмотки электромагнита соединена с катодом диода и через полупроводниковый ключ с первой клеммой питания, причем устройство дополнительно содержит микроконтроллер с аналогоцифровым преобразователем, аналоговыми и дискретными входами, дискретным выходом, первый аналоговый вход которого подключен к выводу резистора, соединенного с клеммой для подсоединения обмотки электромагнита, стабилизированный блок для питания микроконтроллера, резистивный делитель, соединенный с вторым аналоговым входом микроконтроллера для стабилизации мощности тепловых потерь в обмотке электромагнита в режиме удержания при изменении напряжения питания, дискретный выход микроконтроллера соединен с полупроводниковым ключом. 5 ил.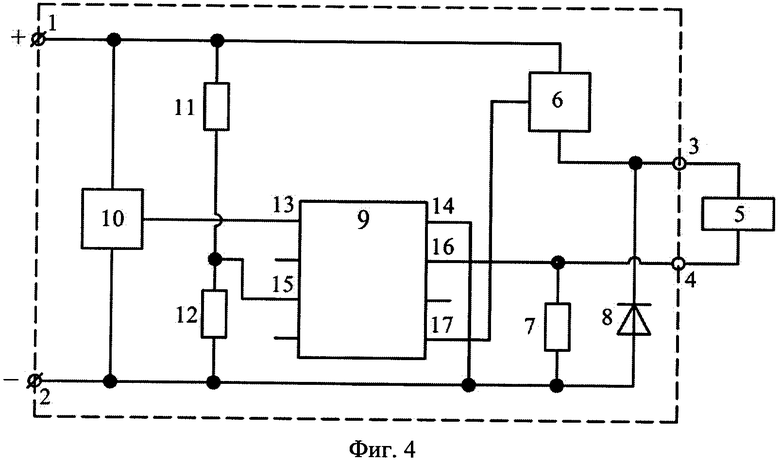
Устройство управления электромагнитами постоянного напряжения, содержащее первую и вторую клеммы питания, связанные соответственно с положительным и отрицательным полюсами источника постоянного напряжения, две клеммы для подсоединения обмотки электромагнита, одна из которых соединена с резистором, диод, полупроводниковый ключ, отличающееся тем, что второй вывод резистора подключен непосредственно к второй клемме питания и к аноду диода, другая клемма для подсоединения обмотки электромагнита соединена с катодом диода и через полупроводниковый ключ с первой клеммой питания, причем в устройство дополнительно введены микроконтроллер, первый аналоговый вход которого подключен к выводу резистора, соединенного с клеммой для подсоединения обмотки электромагнита, стабилизированный блок для питания микроконтроллера, резистивный делитель, соединенный с вторым аналоговым входом микроконтроллера для стабилизации мощности тепловых потерь в обмотке электромагнита в режиме удержания при изменении напряжения питания, дискретный выход микроконтроллера соединен с полупроводниковым ключом.
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТОМ | 1999 |
|
RU2187161C2 |
| УСТРОЙСТВО ФОРСИРОВАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТОМ ПОСТОЯННОГО ТОКА | 2006 |
|
RU2310938C1 |
| US3579052A1,18.05.1971. | |||

