Предлагаемое изобретение относится к электротехнике и может быть использовано для управления приводными электромагнитами (ЭМ) клапанов и коммутационных аппаратов.
Известны различные способы определения перемещения или положения исполнительного элемента ЭМ по характеру изменения тока обмотки.
Например, в [1] описаны способ и устройство определения положения исполнительного элемента ЭМ по результатам сравнения сигнала, пропорционального току, протекающему через обмотку ЭМ, с опорным напряжением. Причем опорное напряжение формируют из сигнала, пропорционального току, обработанного фильтром нижних частот (ФНЧ). Сравнение выполняют с использованием компаратора, на один из входов которого подается сигнал, пропорциональный току, протекающему через обмотку ЭМ, а на другой - опорное напряжение. Результат сравнения позволяет определить только, имело ли место срабатывание ЭМ.
В описании патента [2] предложены способ и реализующее его устройство, которые позволяют определить положение якоря соленоида путем наложения сигнала распознавания фиксированной частоты на управляющий сигнал драйвера обмотки. Объединенный сигнал подается на обмотку соленоида. При этом переменная составляющая тока, протекающего через его обмотку, меняется в зависимости от изменения ее индуктивности, которая, в свою очередь, зависит от положения якоря. Датчик тока формирует выходной сигнал, соответствующий уровню тока, протекающего через обмотку соленоида. С помощью полосового фильтра выделяют переменную компоненту этого выходного сигнала, которая вызвана действием сигнала распознавания. Соответствующий сигнал определения положения якоря формируется на выходе фильтра. Такое техническое решение требует использования значительных аппаратных средств, таких как генератор фиксированной частоты, фильтр нижних частот и полосовой фильтр, а также демодулятор. Кроме того, применение этого технического решения возможно только совместно с системами, поддерживающими широтно-импульсное регулирование тока в обмотке ЭМ.
Предложенная в [3] система позволяет определить положение управляющего элемента электрически управляемого привода. Привод включается управляемым ключом в момент, когда ток через обмотку ЭМ имеет величину меньшую, чем нижнее пороговое значение, и выключается в момент, когда током достигнуто верхнее пороговое значение. Длительность включенного и выключенного состояния задаются как функции нижнего и верхнего пороговых значений, а характер изменения тока в обмотке при переключении зависит от положения управляющего элемента. Положение управляющего элемента определяется из соотношения продолжительности включенного и выключенного состояний и суммы этих временных интервалов. Оно формируется как результат сравнения длительностей упомянутой суммы и включенного и выключенного состояний с соответствующими сохраненными справочными данными. Данное техническое решение может быть использовано только в системах с релейным (гистерезисным) регулированием тока в обмотке ЭМ. При этом длительность включенного состояния будет зависеть не только от положения управляющего элемента, но и от изменения напряжения питания. Кроме того, реализация этого способа требует значительного объема ресурсов управляющей системы для хранения массивов значений справочных данных, используемых при выполнении сравнения указанных переменных.
Наиболее близким к заявляемому техническому решению являются способ определения положения якоря ЭМ и устройство для его осуществления, описанные в [4]. Здесь предложено по измерениям текущего значения тока через обмотку определять скорость его изменения и в момент времени, когда при срабатывании ЭМ начинается уменьшение текущего значения тока через обмотку, определять величину локального максимума тока. А в момент времени, когда после окончания движения якоря при срабатывании заканчивается уменьшение текущего значения тока через обмотку и начинается его увеличение, формировать сигнал, свидетельствующий о произошедшем срабатывании ЭМ. Кроме того, предложено решение, позволяющее по величине локального максимума тока и величине напряжения, приложенного к обмотке в момент достижения локального максимума тока, определять начальное положение якоря по отношению к стопу (начальный зазор), которое имело место перед подачей напряжения на обмотку ЭМ. Описана также функциональная схема устройства для определения положения якоря, и приведено экспериментальное подтверждение его работоспособности.
Однако, техническое решение [4] наряду со всеми его преимуществами обладает следующими недостатками. При его применении требуется непрерывное измерение двух параметров - тока в обмотке ЭМ и приложенного к ней напряжения. Кроме того, это решение требует для своего использования двумерный массив экспериментальных данных и предложенные аналитические аппроксимирующие зависимости имеют относительно сложную структуру и довольно большое количество (а именно 5) определяемых по экспериментальным данным постоянных коэффициентов.
Задачей предполагаемого изобретения является упрощение способа определения положения якоря ЭМ и устройства для его осуществления за счет снижения количества непрерывно измеряемых электрических параметров и объема необходимых экспериментальных данных, а также упрощения используемых для определения значения зазора между якорем и стопом ЭМ расчетно-экспериментальных аппроксимирующих зависимостей.
Для решения поставленной задачи предлагается определение текущего значения тока через обмотку и направления скорости его изменения осуществлять после обработки результата измерения тока фильтром нижних частот на этапе отпускания электромагнита после снятия напряжения с его обмотки. Причем в момент времени, когда начинается увеличение текущего значения тока через обмотку, соответствующее началу движения якоря при отпускании, определяют величину локального минимума тока, после чего величину локального максимума тока определяют в момент времени, когда при отпускании начинается первое уменьшение текущего значения тока через обмотку после окончания движения якоря. В этот же момент времени формируют признак, свидетельствующий о произошедшем отпускании электромагнита и переходе его якоря в состояние, соответствующее максимально возможному отклонению якоря от стопа. А также определяют разность между локальным максимумом и локальным минимумом тока и по величине этой разности определяют значение зазора между якорем и стопом электромагнита в обесточенном состоянии.
Для определения значения зазора между якорем и стопом электромагнита в обесточенном состоянии до начала эксплуатации электромагнита при испытаниях в лабораторных или заводских условиях формируют таблицу, связывающую значения зазора между якорем и стопом электромагнита в обесточенном состоянии со значениями разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании электромагнита. Эту таблицу запоминают и используют при определении зазора между якорем и стопом электромагнита в обесточенном состоянии во время эксплуатации электромагнита.
Величину зазора между якорем и стопом электромагнита в обесточенном состоянии можно определять по значению разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании электромагнита, например, методом линейной интерполяции с использованием запомненных табличных значений.
Предлагается также другой вариант определения зазора между якорем и стопом ЭМ в обесточенном состоянии по значению разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании ЭМ по соотношению

где Zs - величина зазора между якорем и стопом ЭМ в обесточенном состоянии;
ΔI=Ilmax-Ilmim;
Ilmax, Ilmin - значения локального максимума и локального минимума тока при отпускании ЭМ;
е - основание натурального логарифма;
C1, C2, C3 - постоянные коэффициенты, определяемые, например, методом наименьших квадратов при аппроксимации значений зазора между якорем и стопом ЭМ в обесточенном состоянии в зависимости от значений разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании ЭМ, хранящихся в сформированной таблице.
Сигнал, свидетельствующий о произошедшем отпускании ЭМ, и значение зазора между якорем и стопом ЭМ в обесточенном состоянии, передают по запросу внешним устройствам для регистрации и документирования текущих значений параметров ЭМ.
Для обеспечения помехозащищенности и однозначного определения положения якоря ЭМ после отпускания величину разности между локальным максимумом и локальным минимумом тока в обмотке ЭМ при отпускании определяют, после снятия напряжения с обмотки ЭМ, на отрезке времени [0,1tго; 1,25tго], где tго - время гарантированного отпускания ЭМ.
В устройство, реализующее предлагаемый способ, для решения задачи предполагаемого изобретения дополнительно введены фильтр нижних частот (ФНЧ), диод, третий и четвертый резисторы, а измеритель тока содержит измерительный резистор, первый вывод которого соединен в выходом электромагнита и первым выводом четвертого резистора, второй вывод которого соединен с первым выводом третьего резистора и выводом 24 микроконтроллера. Вторые выводы третьего и измерительного резисторов и выводы 8 и 19 микроконтроллера соединены с отрицательным выводом источника питания. Первые выводы первого и второго резисторов соединены с выводом 23 микроконтроллера, вывод 22 которого соединен со вторым выводом второго резистора, соединенным также с выводом 25 микроконтроллера и входом фильтра низких частот, выход которого соединен с выводом 26 микроконтроллера. Катод диода соединен с выходом ключа, а его анод с отрицательным выводом источника питания.
Сущность предлагаемого технического решения поясняется чертежами.
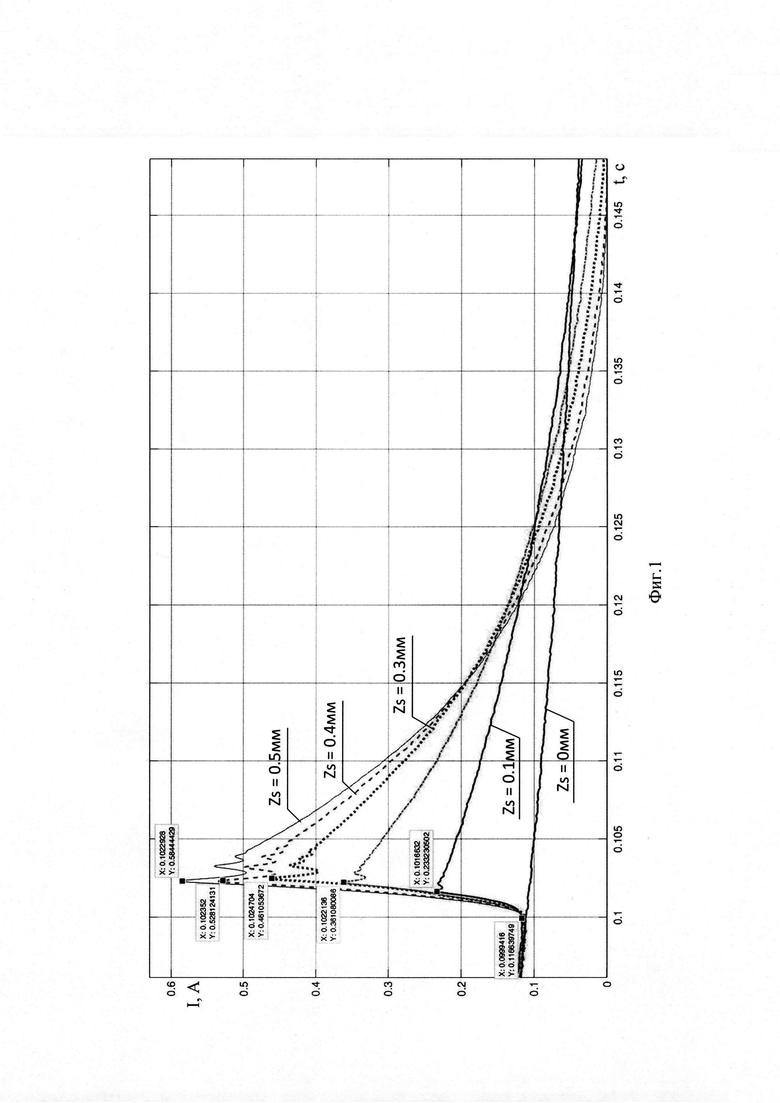
Фиг. 1. Экспериментальные зависимости тока в обмотке ЭМ при его отпускании от времени для разных значений зазора между якорем и стопом ЭМ в обесточенном состоянии.
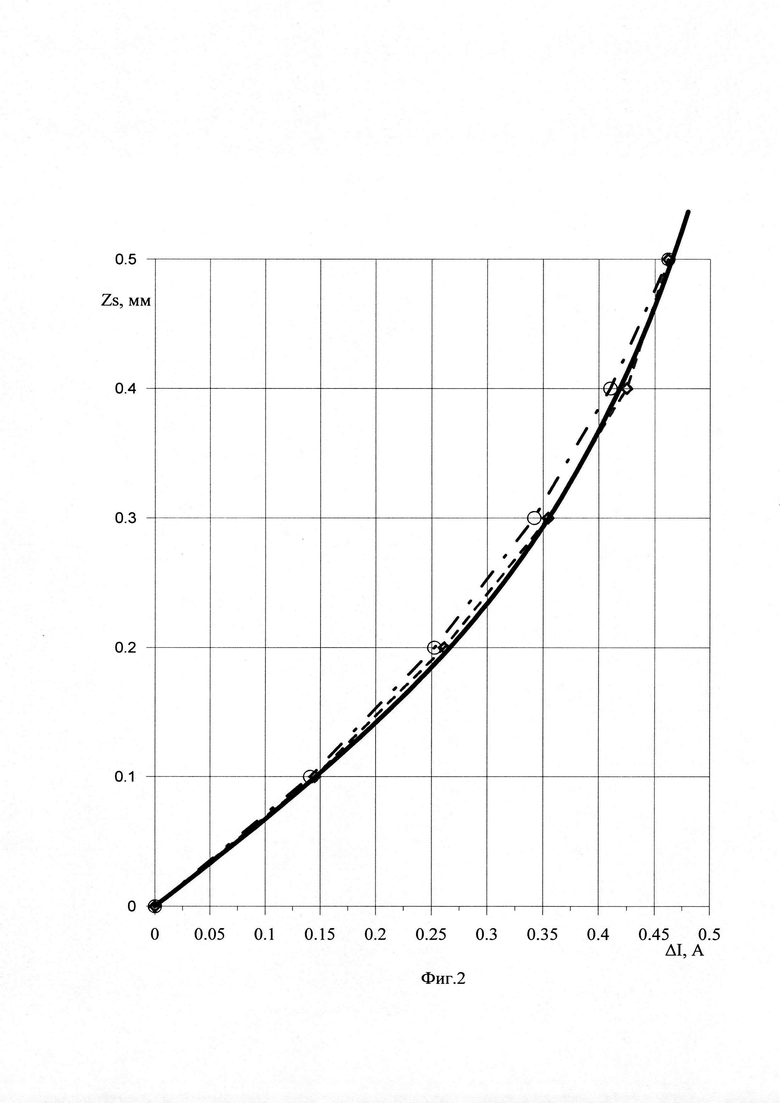
Фиг. 2. Экспериментальные и аппроксимирующая зависимости значений зазора между якорем и стопом ЭМ в обесточенном состоянии от разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании ЭМ.
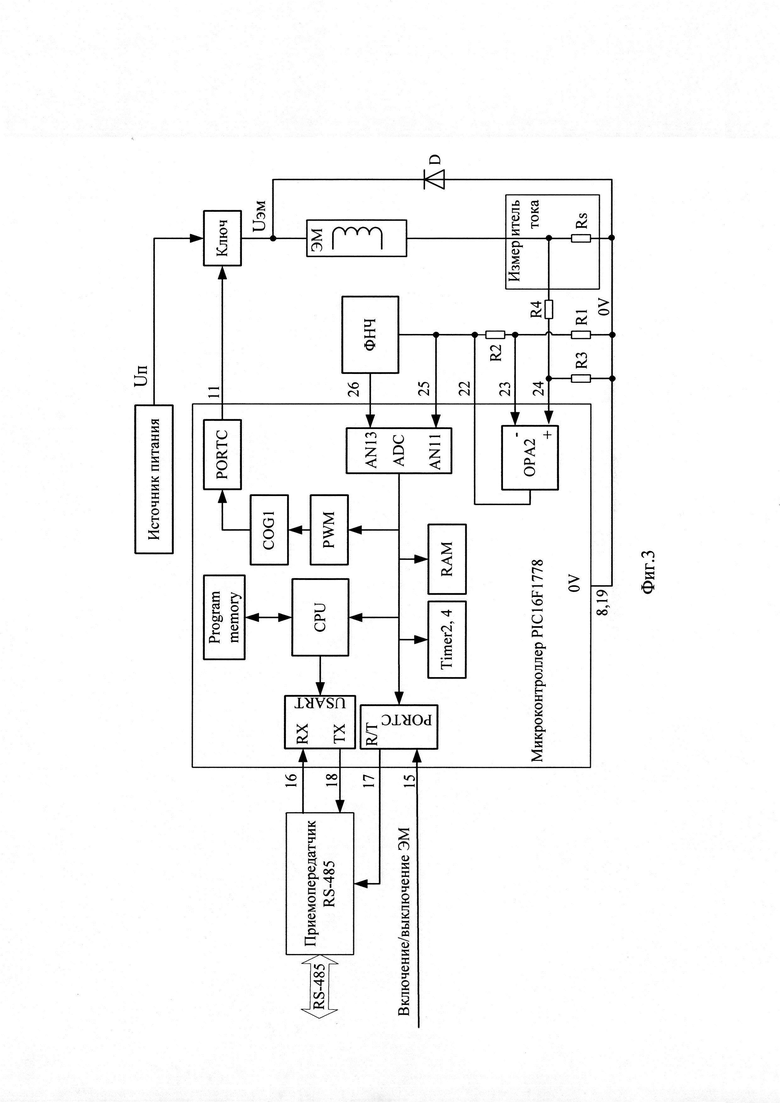
Фиг. 3. Функциональная схема устройства для определения положения якоря электромагнита.
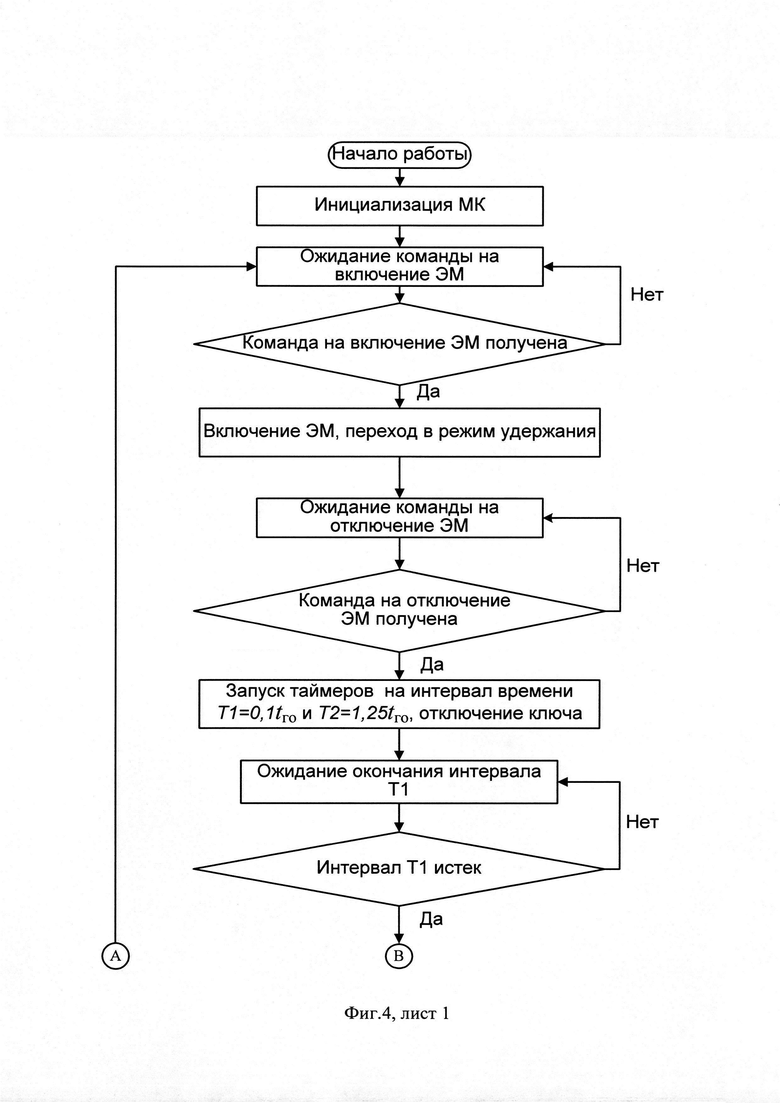
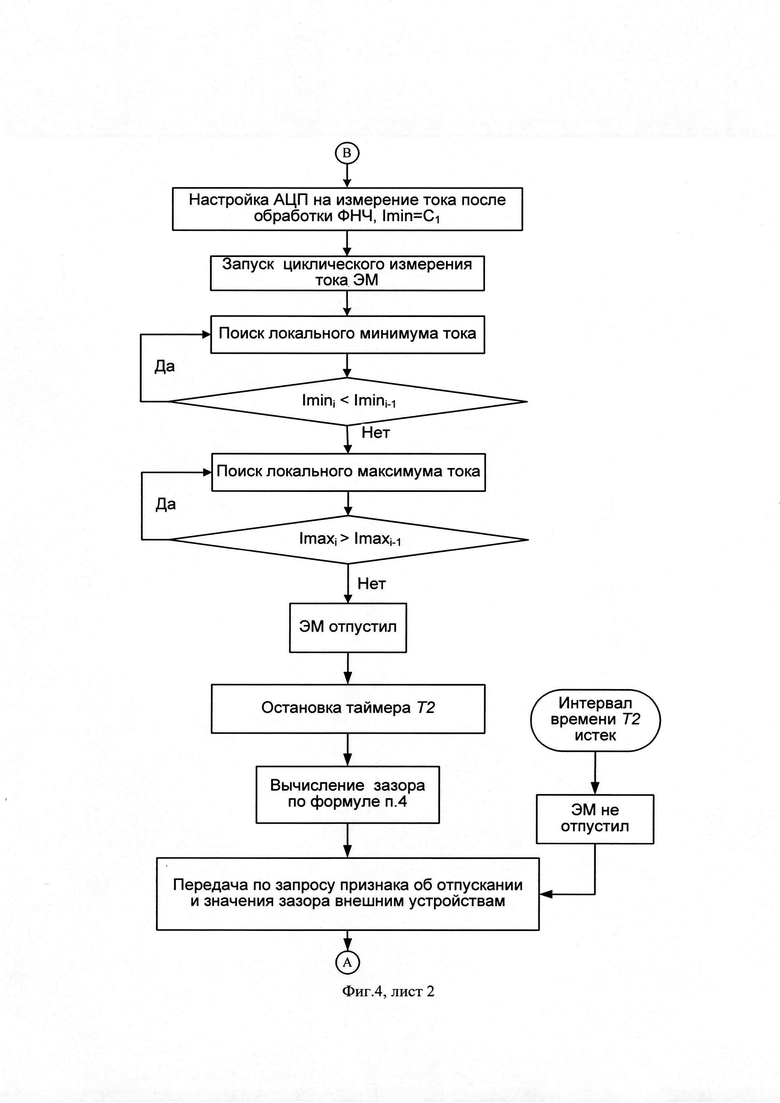
Фиг. 4. Блок-схема возможного алгоритма, реализуемого при работе устройства для определения положения якоря электромагнита.
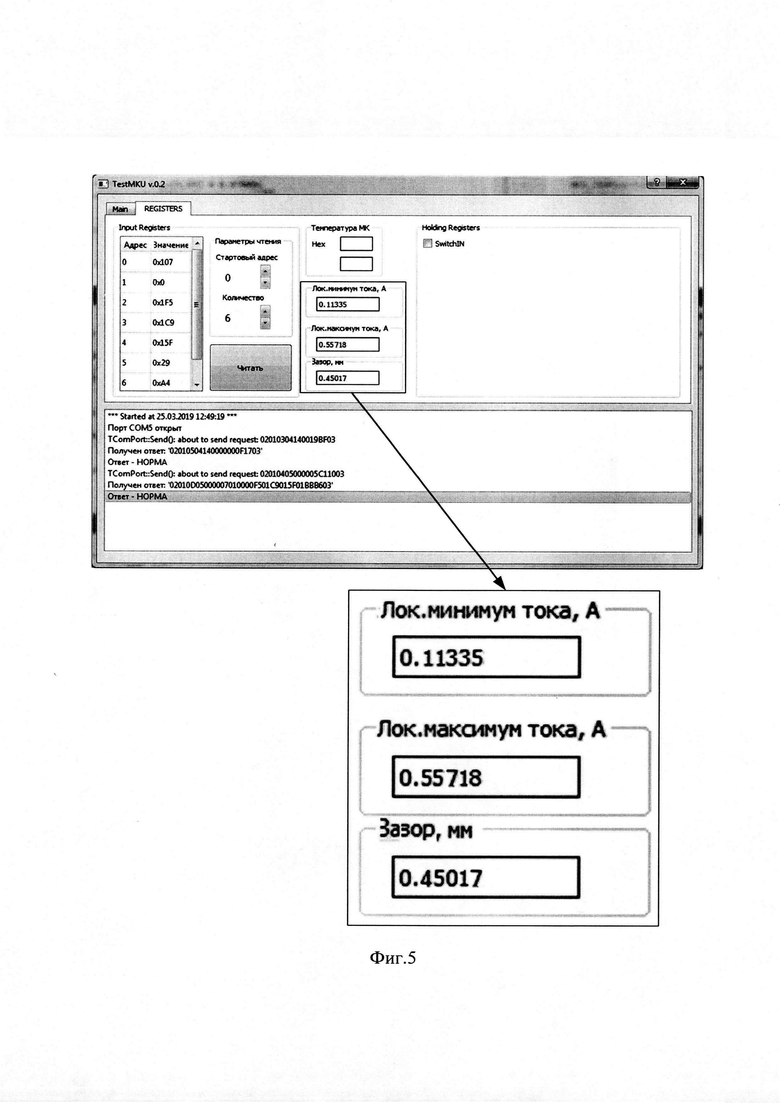
Фиг. 5. Изображение на экране персонального компьютера окна, отражающего работу заявляемого устройства, связанного с персональным компьютером с помощью приемопередатчика RS-485 и конвертера RS-485 - USB.
Физической основой предлагаемого способа послужили результаты лабораторных испытаний ЭМ втяжного типа с дисковым якорем. В процессе этих испытаний исследовались переходные процессы изменения тока в обмотке ЭМ при его отпускании для разных значений зазора между якорем и стопом ЭМ в обесточенном состоянии. Исследовалось также влияние разных величин напряжения питания и температуры обмотки на зависимость между значениями зазора между якорем и стопом ЭМ в обесточенном состоянии и значениями разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании ЭМ.
На фиг. 1 приведены экспериментальные переходные процессы изменения тока в обмотке ЭМ, полученные при его отпускании при снятии напряжения с его обмотки для разных значений зазора между якорем и стопом ЭМ в обесточенном состоянии. Значение зазора устанавливалось с помощью микрометрического винта и набора щупов №2 ГОСТ 882-75, кл. 2. Анализ приведенных на этом рисунке графиков показывает, что величина локального минимума тока, текущего через обмотку при отпускании ЭМ, практически не зависит от величины зазора между якорем и стопом ЭМ в обесточенном состоянии, что объясняется одинаковыми начальными условиями трогания якоря при отпускании из прижатого к стопу состояния. При этом величина локального максимума тока возрастает с увеличением зазора между якорем и стопом ЭМ в обесточенном состоянии, что вызвано разной величиной перемещения якоря при его движении в процессе отпускания. В результате величина разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании ЭМ, характеризует величину зазора между якорем и стопом ЭМ в обесточенном состоянии. Причем, явление монотонного возрастания этой разности с увеличением зазора между якорем и стопом ЭМ в обесточенном состоянии можно использовать для определения его величины.
Если по экспериментальным данным построить зависимость между величиной разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании ЭМ, и величиной зазора между якорем и стопом ЭМ в обесточенном состоянии, то в процессе эксплуатации ЭМ можно определять зазор между якорем и стопом ЭМ в обесточенном состоянии по текущим измерениям переходного процесса изменения тока через обмотку ЭМ при отпускании.
На фиг. 2 приведены зависимости величины зазора между якорем и стопом ЭМ в обесточенном состоянии от величины разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании ЭМ. Здесь на графиках ромбами нанесены соединенные штриховой линией точки, полученные при обработке приведенных на фиг. 1 экспериментальных осциллограмм изменения тока при отпускании ЭМ. Они отражают экспериментальную зависимость между разностью локального максимума и локального минимума тока, текущего через обмотку при отпускании ЭМ, и величиной зазора между якорем и стопом ЭМ в обесточенном состоянии. Числовые данные, использованные при построении этой зависимости, приведены в таблице 1.

Если эти экспериментальные данные аппроксимировать методом наименьших квадратов зависимостью вида (1), получим кривую, показанную на графиках фиг. 2 толстой сплошной линией. При этом построении использованы следующие значения постоянных коэффициентов в зависимости (1): С1=0,004552; С2=8,329; С3=0,6111.
Экспериментальные данные, приведенные в таблице 1, и соответствующие им значения постоянных коэффициентов аппроксимирующей зависимости (1) могут быть получены для каждого конкретного ЭМ при проведении его лабораторных или заводских испытаний.
Проведенные экспериментальные исследования показали, что величина локального максимума тока, текущего через обмотку при отпускании ЭМ, не зависит от значения напряжения питания обмотки. Это обусловлено тем, что при эксплуатации современных ЭМ обычно (см., например, [5-7]) используется стабилизация тока в обмотке ЭМ в режиме удержания, что приводит к обеспечению идентичных начальных условий по току в обмотке ЭМ при поступлении команды на снятие напряжения с обмотки и, соответственно, выполнение отпускания ЭМ.
Также экспериментально доказано, что увеличение температуры обмотки на 96,5°С, соответствующее увеличению ее активного сопротивления на 38,8%, не существенно влияет на зависимость ZS(ΔI). Полученная при этих условиях экспериментальная зависимость приведена кружочками, соединенными штрих-пунктирной линией, на графиках фиг. 2. Из графика видно, что максимальная относительная погрешность определения зазора в этих условиях составит не более 7,5%.
Таким образом, предлагаемый способ включает:
- измерение сглаженного ФНЧ текущего значения тока через обмотку ЭМ и определение скорости его изменения на этапе отпускания ЭМ после снятия напряжения с его обмотки;
- определение величины локального минимума тока в момент времени, когда начинается увеличение текущего значения тока через обмотку соответствующее началу движения якоря при отпускании;
- определение величины локального максимума тока в момент времени, когда начинается первое уменьшение текущего значения тока через обмотку после окончания движения якоря при отпускании;
- формирование в этот же момент времени признака, свидетельствующего о произошедшем отпускании ЭМ и переходе его якоря в состояние, соответствующее максимально возможному отклонению якоря от стопа;
- определение разности между локальным максимумом и локальным минимумом тока при отпускании;
- определение по величине этой разности значения зазора между якорем и стопом ЭМ в обесточенном состоянии.
Моменты времени, в которые достигаются значения локального минимума и локального максимума тока в обмотке ЭМ, определяются по изменению знака скорости изменения тока.
Как описано выше, до начала эксплуатации ЭМ при его испытаниях в лабораторных или заводских условиях формируют таблицу, связывающую значения зазора между якорем и стопом ЭМ в обесточенном состоянии со значениями разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании ЭМ. Эту таблицу запоминают и используют при определении зазора между якорем и стопом электромагнита в обесточенном состоянии во время эксплуатации ЭМ.
Величину зазора между якорем и стопом ЭМ в обесточенном состоянии можно определять по значению разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании ЭМ, например, методом линейной интерполяции с использованием запомненных табличных значений.
Можно также величину зазора между якорем и стопом ЭМ в обесточенном состоянии определять, используя соотношение (1), вычисляя постоянные коэффициенты в нем, например, методом наименьших квадратов при аппроксимации значений зазора между якорем и стопом электромагнита в обесточенном состоянии в зависимости от значений разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании ЭМ, помещенных в сформированной таблице.
Как уже отмечалось, сигнал, свидетельствующий о произошедшем отпускании ЭМ, и полученное значение зазора между якорем и стопом ЭМ в обесточенном состоянии, обычно передают внешним устройствам для регистрации и документирования текущих значений параметров ЭМ.
Для снижения влияния помех и достоверного формирования после каждого снятия напряжения с обмотки ЭМ признака, свидетельствующего о произошедшем отпускании ЭМ, определение величины разности между локальным максимумом и локальным минимумом тока в обмотке ЭМ при отпускании производят на отрезке времени [0,1tго; 1,25tго], где tго - время гарантированного отпускания ЭМ.
Функциональная схема устройства для определения положения якоря электромагнита, предлагаемого для реализации заявляемого способа, показана на фиг. 3.
Устройство содержит последовательно соединенные источник питания (1) и ключ (2), выход которого соединен со входом ЭМ (3), измеритель тока (4), вход которого соединен с выходом ЭМ (3), соединенные последовательно первый и второй резисторы R1 и R2, приемопередатчик RS-485 (5), связанный двунаправленной линией с внешними устройствами, а также микроконтроллер PIC16F1778 (6), вывод 11 которого соединен с управляющим входом ключа (2), вывод 16 микроконтроллера (6) соединен с выходом приемопередатчика RS-485 (5), два входа которого соединены соответственно с выводами 17 и 18 микроконтроллера (6), вывод 15 которого соединен с дискретным выходом системы верхнего уровня, а второй вывод первого резистора R1 соединен с отрицательным выводом источника питания (1). Устройство также содержит ФНЧ (7), диод D, третий и четвертый резисторы R3 и R4. Измеритель тока (4) содержит измерительный резистор Rs, первый вывод которого соединен в выходом ЭМ (3) и первым выводом четвертого резистора R4, второй вывод которого соединен с первым выводом третьего резистора R3 и выводом 24 микроконтроллера (6). Вторые выводы третьего и измерительного резисторов R3 и Rs и выводы 8 и 19 микроконтроллера (6) соединены с отрицательным выводом источника питания 0V. Первые выводы первого и второго резисторов R1 и R2 соединены с выводом 23 микроконтроллера (6), вывод 22 которого соединен со вторым выводом второго резистора R2, соединенным также с выводом 25 микроконтроллера и входом ФНЧ (7), выход которого соединен с выводом 26 микроконтроллера (6). Катод диода D соединен с выходом ключа (2), а его анод с отрицательным выводом источника питания 0V.
Работает устройство следующим образом. Источник питания (1) обеспечивает напряжение, необходимое для срабатывания ЭМ (3), и напряжение 5 В для питания элементов схемы. Ключ (2) является управляемым силовым ключом, выполняющим коммутацию напряжения на ЭМ (3) по сигналам управления, формируемым микроконтроллером (МК) PIC16F1778-I/SO (6) [8].
МК (6) управляет работой силового ключа (2) и приемопередатчика RS-485 (5), а также обеспечивает прием сигналов управления от внешнего устройства и передачу рассчитанного значения зазора между якорем и стопом ЭМ в обесточенном состоянии и признака, свидетельствующего о произошедшем или нет срабатывании ЭМ, внешним устройствам. Приемопередатчик RS-485 (5) преобразует логические сигналы МК (6) в дифференциальный сигнал полудуплексной интерфейсной многоточечной линии в соответствии с требованиями стандарта [9]. ЭМ (3) является объектом контроля и управления.
Включение и отключение ЭМ (3) может выполняться по командам, поступающим по интерфейсу RS-485 через приемопередатчик RS-485 (5) и вывод 16 МК (6), или по дискретному сигналу «Включение/выключение ЭМ», поступающему на вывод 15 МК (6). В качестве приемопередатчика RS-485 (5) может быть применена микросхема SN65HVD1785 [10]. Эта микросхема предназначена для использования в качестве приемопередатчика по стандарту RS-485 и для организации полудуплексного канала связи по соответствующим стандартам. Приемопередатчик RS-485 (5) соединен с модулем универсального асинхронного приемопередатчика UART (Universal Asynchronous Receiver Transmitter) МК (6) через его выводы 16 и 18. UART представляет собой периферийное устройство микроконтроллера. Дополнительный сигнал управления направлением передачи (RYT) формируется программно и подается через порт PORTC на соответствующий вход приемопередатчика RS-485 (5) через вывод 17 МК (6).
Измеритель тока (4) выполняет нормирование тока IЭМ, протекающего через обмотку ЭМ (3), то есть преобразование его в напряжение, пропорциональное этому току. Для снижения величины потерь на измерителе тока, а также для согласования полученного напряжения с диапазоном входных сигналов ADC (АЦП) использован операционный усилитель ОРА2, входящий в состав периферийных устройств МК (6).
Измеритель тока (4) выполнен в соответствии с рекомендациями, приведенными на FIGURE 1 Low-Side Current Sensing в [11], операционный усилитель включен по схеме дифференциального усилителя, например, как показано на Figure 8 в [12]. Такое решение позволяет получить высокую помехозащищенность за счет высокого подавления синфазного сигнала, что является важным для предлагаемого способа при измерении малых значений тока отпускания. Выходное напряжение ОРА2 через вывод 22 МК и далее через вывод 25 МК поступает на вход AN 11 ADC (АЦП), входящего в состав периферийных устройств МК (6). По данному входу обеспечивается регулирование тока, протекающего через обмотку ЭМ в режиме удержания. Регулирование обеспечивается за счет широтно-импульсной модуляции, реализуемой модулем PWM (PULSE-WIDTH MODULATION) через модуль COG1 (COMPLEMENTARY OUTPUT GENERATOR MODULES), выход которого через PORTC и вывод 11 МК (6) управляет работой ключа (2). В качестве силового ключа в устройстве может быть использован ключ верхнего уровня AUIPS7221R [13].
После выключения ключа (2) возврат энергии, запасенной в индуктивности обмотки ЭМ (3), происходит по цепи ЭМ - измерительный резистор Rs - диод D - ЭМ, что обеспечивает неразрывность тока протекающего через измерительный резистор Rs. Выполнение измерений экстремумов тока задерживается на время 0,1tго, задаваемое таймером Timer2, и продолжается до нахождения локального максимума или до истечения времени 1,25tго, формируемого таймером Timer4. Измерение значений локального минимума и локального максимума тока при отпускании ЭМ выполняется ADC по входу AN13 (вывод 26 МК) с выхода ФНЧ (7). Использование такого решения позволяет сглаживать локальный максимум тока, тем самым снижать динамическую ошибку определения его величины, вызванную максимальной частотой опроса канала ADC. Измеренные значения локальных экстремумов сохраняются в оперативной памяти (RAM) МК (6), после чего могут быть использованы для вычисления величины зазора между якорем и стопом ЭМ в обесточенном состоянии путем интерполяции табличных данных или применения соотношения (1).
Табличные данные для использования метода линейной интерполяции или постоянные коэффициенты - C1, C2, C3 для определения зазора с использованием соотношения (1) могут быть загружены в энергонезависимую память Program memory (см. схему фиг. 3) или на этапе программирования МК при помощи стандартного программатора, или в процессе эксплуатации через последовательный интерфейс RS-485.
Блок-схема возможного алгоритма, реализуемого при работе заявляемого устройства, приведена на фиг. 4. Таймер, который запускается на отрезок времени T2=l,25tго в блоке «Отключение ключа и запуск таймеров на интервал времени T1=0,1tго и T2=1,25tго», осуществляет асинхронный и независимый от выполнения последующих блоков алгоритма счет времени. Окончание счета таймера означает, что за время Т2 отпускания ЭМ не произошло. В этом случае выполнение алгоритма прерывается и продолжается далее с блока «Остановка таймера Т2».
Работоспособность заявляемого устройства подтверждается приведенным на фиг. 5 изображением окна, полученного на экране персонального компьютера и отражающего работу устройства. При получении этого изображения устройство было связано с персональным компьютером с помощью приемопередатчика RS-485 и конвертера RS-485 - USB. В приведенном на фиг. 5 изображении, наряду с другой информацией о работе устройства, отображаются измеренные значения локального максимума и локального минимума тока в обмотке ЭМ при отпускании в текущем цикле работы, а также значение величины зазора между якорем и стопом ЭМ в обесточенном состоянии, рассчитанное с использованием аппроксимирующей зависимости по соотношению (1). Для данного примера предварительно установленное с помощью микрометрического винта и набора щупов значение величины зазора между якорем и стопом ЭМ в обесточенном состоянии равнялось 0,45 мм.
Из приведенных материалов описания предполагаемого изобретения следует, что решение поставленной задачи по упрощению способа определения положения якоря ЭМ и устройства для его осуществления достигается тем, что:
- в предлагаемом техническом решении используется только один непрерывно измеряемый электрический параметр - ток в обмотке ЭМ (в прототипе - два параметра);
- объем необходимых экспериментальных данных сводится для описанного примера к запоминанию таблицы из шести пар чисел (в прототипе используется двумерный массив экспериментальных данных);
- используемая для определения значения зазора между якорем и стопом ЭМ в обесточенном состоянии расчетно-экспериментальная аппроксимирующая зависимость содержит только три постоянных коэффициента (в прототипе - пять).
Использование предлагаемого технического решения будет полезно, например, при диагностике функционирования ЭМ и его настройке для решения конкретной задачи.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. METHOD AND CIRCUIT FOR DETECTING THE ARMATURE POSITION OF AN ELECTROMAGNET. US 6,949,923 B2. Date of Patent: Sep. 27, 2005.
2. METHOD AND APPARATUS FOR SENSING ARMATURE POSITION IN RELUCTANCE ELECTROMAGNETIC ACTUATORS. CANADIAN PATENT. CA 2247809 C. Date 2001/10/23.
3. SYSTEM FOR DETERMINING POSITIONS OF A CONTROL ELEMENT OF AN ELECTRICALLY DRIVEN ACTUATOR. US 2004/0016461 A1. Pub. Date: Jan. 29, 2004.
4. СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ. Патент RU 2717952, бюл. №9, 27.03.2020.
5. Verfahren und Vorrichtung zum Betreiben eines elektromagnetischen Gaswechselventils. EP 0205807 B1, 23.11.1989.
6. DRIVE DEVICE FOR FUEL INJECTION DEVICE. US 2015/0377,176 A1. Dec. 31, 2015.
7. METHOD FOR DETECTING A FAILED ACTUATION OF A SWITCHABLE SOLENOID VALVE, ELECTRONIC CIRCUIT FOR PERFORMING THE METHOD, PUMP AND MOTOR VEHICLE. EP 3385527 A1. 06.04.2017.
8. 28/40/44-Pin, 8-Bit Flash Microcontroller www.microchip.com/product/en/ PIC16F1778 DS40001819B.pdf
9. ANSI TIA/EIA RS-485-A: (Recommended standard 485 Edition A) 1998 Electrical Characteristics of Generators and Receivers for Balanced Digital Multipoint Systems.
10. http://www.ti.com/lit/ds/symlink/sn65hvdl785.pdf
11. AN1332. Current Sensing Circuit Concepts and Fundamentals Microchip Technology Inc. http://www.microchip.com/support\ DS01332B.
12. AN1747 Operation Amplifier Applications Using 8-Bit PIC Microcontrollers. http://www.microchip.com/support\DS00001747A.
13. PWM INTELLIGENT POWER HIGH SIDE SWITCH https://www.infineon.com/ dgd1/AUIPS7221r.pdf.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2747003C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2717952C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746964C1 |
| СПОСОБ МОНИТОРИНГА ДАВЛЕНИЯ НА ВХОДЕ ГАЗОВОГО ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2802294C1 |
| СПОСОБ МОНИТОРИНГА ДАВЛЕНИЯ НА ВХОДЕ ГАЗОВОГО ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2832565C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2756292C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2795208C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2783869C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2802271C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2793305C1 |
Группа изобретений относится к электротехнике и может быть использована для диагностики состояния приводных электромагнитов (ЭМ) клапанов и коммутационных аппаратов. Технический результат – упрощение способа определения положения якоря ЭМ и устройства для его осуществления. Данный технический результат достигается за счет снижения количества непрерывно измеряемых электрических параметров и объема необходимых экспериментальных данных, а также за счет упрощения используемых для определения значения зазора между якорем и стопом ЭМ расчетно-экспериментальных аппроксимирующих зависимостей. 2 н. и 5 з.п. ф-лы, 5 ил., 1 табл.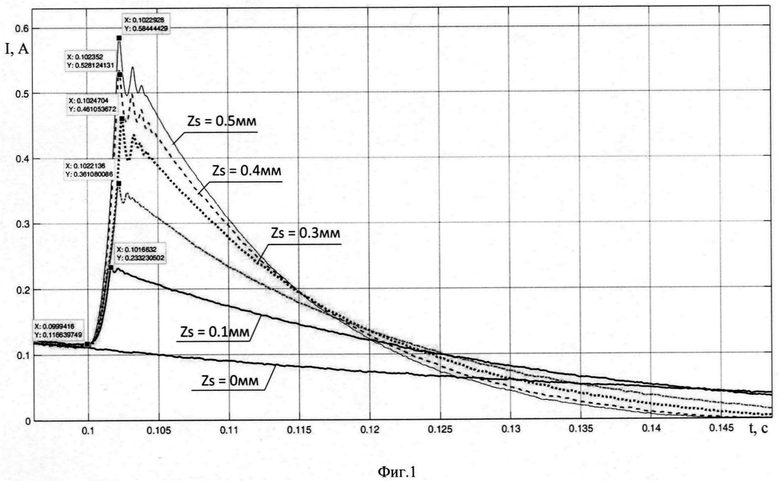
1. Способ определения положения якоря электромагнита, включающий измерение текущего значения тока через его обмотку, определение направления скорости его изменения, определение величины локального максимума тока, определение значения зазора между якорем и стопом электромагнита в обесточенном состоянии и формирование признака, характеризующего состояние электромагнита, отличающийся тем, что определение текущего значения тока через обмотку и направления скорости его изменения осуществляют после обработки результата измерения тока фильтром нижних частот на этапе отпускания электромагнита после снятия напряжения с его обмотки, причем в момент времени, когда начинается увеличение текущего значения тока через обмотку, соответствующее началу движения якоря при отпускании, определяют величину локального минимума тока, после чего величину локального максимума тока определяют в момент времени, когда при отпускании начинается уменьшение текущего значения тока через обмотку после окончания движения якоря, и в этот же момент времени формируют признак, свидетельствующий о произошедшем отпускании электромагнита и переходе его якоря в обесточенное состояние, соответствующее максимально возможному отклонению якоря от стопа, а также определяют разность между локальным максимумом и локальным минимумом тока и по величине этой разности определяют значение зазора между якорем и стопом электромагнита в обесточенном состоянии.
2. Способ определения положения якоря электромагнита по п. 1, отличающийся тем, что до начала эксплуатации электромагнита при испытаниях в лабораторных или заводских условиях формируют таблицу, связывающую значения зазора между якорем и стопом электромагнита в обесточенном состоянии со значениями разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании электромагнита, эту таблицу запоминают и используют при определении зазора между якорем и стопом электромагнита в обесточенном состоянии во время эксплуатации электромагнита.
3. Способ определения положения якоря электромагнита по п. 2, отличающийся тем, что величину зазора между якорем и стопом электромагнита в обесточенном состоянии определяют по значению разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании электромагнита, например, методом линейной интерполяции с использованием запомненных табличных значений.
4. Способ определения положения якоря электромагнита по п. 2, отличающийся тем, что величину зазора между якорем и стопом электромагнита в обесточенном состоянии определяют по значению разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании электромагнита, по соотношению
Zs=C1ΔI+C2(ec3ΔI-1),
где Zs - величина зазора между якорем и стопом электромагнита в обесточенном состоянии;
ΔI=Ilmax-Ilmin;
Ilmax, Ilmin - значения локального максимума и локального минимума тока, текущего через обмотку при отпускании электромагнита;
е - основание натурального логарифма;
С1, C2, C3 - постоянные коэффициенты, определяемые, например, методом наименьших квадратов при аппроксимации значений зазора между якорем и стопом электромагнита в обесточенном состоянии в зависимости от значений разности между локальным максимумом и локальным минимумом тока, текущего через обмотку при отпускании электромагнита, хранящихся в сформированной таблице.
5. Способ определения положения якоря электромагнита по п. 1, отличающийся тем, что признак, свидетельствующий о произошедшем отпускании электромагнита, и значение зазора между якорем и стопом электромагнита в обесточенном состоянии передают по запросу внешним устройствам.
6. Способ определения положения якоря электромагнита по п. 1, отличающийся тем, что величину разности между локальным максимумом и локальным минимумом тока в обмотке электромагнита при отпускании определяют после снятия напряжения с обмотки электромагнита на отрезке времени [0,1tго; 1,25tго], где tго - время гарантированного отпускания электромагнита.
7. Устройство для определения положения якоря электромагнита, содержащее последовательно соединенные источник питания и ключ, выход которого соединен со входом электромагнита, измеритель тока, вход которого соединен с выходом электромагнита, соединенные последовательно первый и второй резисторы, приемопередатчик RS-485, связанный двунаправленной линией с внешними устройствами, а также микроконтроллер PIC16F1778, вывод 11 которого соединен с управляющим входом ключа, вывод 16 микроконтроллера соединен с выходом приемопередатчика RS-485, два входа которого соединены соответственно с выводами 17 и 18 микроконтроллера, вывод 15 которого соединен с дискретным выходом системы верхнего уровня, а второй вывод первого резистора соединен с отрицательным выводом источника питания, отличающееся тем, что в него дополнительно введены фильтр нижних частот, диод, третий и четвертый резисторы, а измеритель тока содержит измерительный резистор, первый вывод которого соединен в выходом электромагнита и первым выводом четвертого резистора, второй вывод которого соединен с первым выводом третьего резистора и выводом 24 микроконтроллера, а вторые выводы третьего и измерительного резисторов и выводы 8 и 19 микроконтроллера соединены с отрицательным выводом источника питания, а первые выводы первого и второго резисторов соединены с выводом 23 микроконтроллера, вывод 22 которого соединен со вторым выводом второго резистора, соединенным также с выводом 25 микроконтроллера и входом фильтра нижних частот, выход которого соединен с выводом 26 микроконтроллера, катод диода соединен с выходом ключа, а его анод с отрицательным выводом источника питания.
| US 2011149458 A1, 23.06.2011 | |||
| US 2004016461 A1, 29.01.2004 | |||
| Способ измерения хода якоря двухоб-МОТОчНОгО элЕКТРОМАгНиТА | 1976 |
|
SU828174A1 |
| Устройство для управления электромагнитом | 1978 |
|
SU752517A1 |

