Изобретение относится к области сельскохозяйственного производства (рисосеяние, картофелеводство, овощеводство, полеводство, кормопроизводство) и предназначено для выполнения комплекса агротехнических приемов возделывания сельскохозяйственных культур в автоматизированном режиме с выходом на отдельно взятое растение с высокой точностью путем автоматизации процессов, при значительном снижении энергозатрат и обеспечении высокой экологичности производства.
В качестве аналогов предложенной системы рассматривались устройства, применяемые с целью повышения производительности, снижения уплотнения почвы, разрушения ее структуры. Известны широкозахватные конструкции машин, различные мостовые системы [1]. В основном это системы, имеющие колесные, гусеничные [2] тросовые движители [3]. Их проходимость существенно зависит от несущей способности почвы, от пробуксовок, не выровненности хода. При этом создаются проблемы с точностью выполнения технологических норм (глубины заделки семян, площади питания растений, подрезания растений при культивациях и др.).
Наиболее приближенным и по принципу выполнения технологии и по конструкции к заявленному изобретению относятся мостовая система с опорой на железобетонные сваи [4] и автоматизированный мостовой агротехнический комплекс (АМАК) [5], представляющий мостовую систему, в которой передвижение комплекса осуществляется по рельсовым путям.
К недостаткам агротехнического комплекса АМАК следует отнести: очень высокую его металлоемкость 17,5 т/га, значительную материалоемкость (шпалы, крепеж рельсов), отторжение до 10% площадей пашни на оборудование рельсовых путей. В мостовой системе с опорой на железобетонные сваи также достаточно сложным является оборудование полигона, стоимость и монтаж железобетонных свай. В условиях глубокого промерзания грунта на 3,0-3,5 метра не исключено их смещение по высоте, отклонения от вертикали, что обусловит снижение точности выполнения технологических норм
Задачей изобретения являлось создание автоматизированной агротехнической самодвижущейся платформы, которая обеспечивает гарантированную проходимость агрегата независимо от состояния почвы (низкая несущая способность, липкость, влажность и др.), точное выполнение технологических норм (густота посадки, площадь питания, глубина размещения семян, дозы удобрений, химических, биологических препаратов и др.), возможность выполнения технологических операций, максимальное использование времени (возможность работы в ночное время, во время осадков), снижение энергозатрат, использование возобновляемых энергоресурсов, высокую экологичность земледелия.
Для решения поставленной задачи предлагается ряд технических решений, улучшающих известные агротехнические системы. Для обеспечения передвижения агротехнической самодвижущейся платформы вместо рельсовых, тросовых и свайных опор предлагаются жесткие опоры в виде щебеночных подушек, на которых уложены бетонные блоки, по которым с помощью выдвигающихся балок вдоль и поперек полигона перемещается платформа. На платформе располагается технологический модуль, обеспечивающий выполнение заданных параметров в автоматизированном режиме. Технологический модуль имеет возможность перемещаться вдоль по длинным поперечным балкам рамы П-образного профиля, выполняющим роль направляющих. При этом на платформе так же устанавливается комплекс Глобальной навигационной спутниковой системы (Глонас). Передвижение по жестким опорам обеспечит проходимость платформы вне зависимости от влажности почвы и значительно снижает энергозатраты, связанные с перемещением агрегата по полю. За счет этого уменьшается зависимость сроков выполнения приемов агротехники от почвенно-климатических условий, повышается экологичность земледелия за счет точной дозировки удобрений, гербицидов для каждого растения, снижения разрушения структуры почвенного покрова.
Глонас обеспечивает выполнение комплекса агротехнических приемов возделывания сельскохозяйственных культур в автоматизированном режиме с выходом на отдельно взятое растение, расположение которого зафиксировано в компьютерной памяти. Жестко фиксированные рабочие органы и компьютерное управление обеспечивают точность исполнения заданных параметров по обеспечению потребности каждого в отдельности растения элементами жизнедеятельности, максимального использования их биологического потенциала, оптимизации расхода воды, элементов питания, средств защиты растений от болезней и вредителей. Размер платформы задается в зависимости от размера поля, например 10×30 м. Основой платформы являются профиля П-образного сечения, внутри которых располагаются подвижные выдвигающиеся балки заданного размера, например 20 м, с помощью которых платформа перемещается вдоль полигона во время выполнения технологических операций и поперек при переходе на новый участок. Внутренние балки опираются на бетонные блоки, уложенные на гравийные подушки. Для перемещения внутренних балок на новую позицию рама платформы с помощью гидроцилиндров, опирающихся на бетонные блоки, приподнимается, в результате чего внутренние балки разгружаются и с помощью специального механизма перемещаются и укладываются на бетонные блоки, занимая следующую позицию, после чего гидроцилиндры расслабляются, платформа опускается на внутренние балки и после выполнения технологической операции перекатывается по балкам на следующий участок.
Техническим результатом заявленного изобретения является: снижение зависимости земледелия от погодных условий, повышение качества выполнения работ по подготовке почвы к посеву, уходу за растениями и уборке урожая, снижение энергозатрат на передвижение, снижение до минимума разрушительного воздействия платформы на почвенный покров, обеспечение возможности внедрения автоматизации технологических процессов с использованием средств программирования за счет жесткости конструкции платформы и ее статичной связки с объектом обработки (почвой), обеспечение возможности высокоточной ориентации платформы в пространстве за счет Глобальной навигационной спутниковой системы.
К основным признакам аналога автоматизированного мостового агротехнического комплекса (АМАК) относятся следующие - это мостовая система, на всей ширине которой смонтированы рабочие органы, опорой комплекса служат рельсовые полотна. Технологический процесс осуществляется во время движения комплекса.
Для достижения технического результата в предлагаемом изобретении внедряют ряд отличительных признаков. Для устойчивого перемещения агрегата по полю используются точечные щебеночные подушки, на которых лежат бетонированные площадки. Передвижение платформы осуществляется с помощью пошагового перемещения балок, расположенных внутри профилей П-образного сечения, образующих конструкцию платформы. Передвижение агрегата и выполнение рабочих операций технологическим модулем разделены по времени, что повышает точность исполнения заданных параметров. Существует возможность круглосуточного использования агрегата, обусловленная жестокостью конструкции платформы и опорных устройств, а также программным управлением. Значительно снижена зависимость выполнения работ от погодных условий и заболоченности массивов (рисовые поля) и существенного снижения разрушительного воздействия на структуру почвы за счет передвижения агрегата по жестким опорам. Обеспечивается высокая экологичность и устойчивость земледелия за счет строго нормированного внесения доз удобрений и химических средств защиты растений, обусловленного программным управлением. Относительно ранее предложенных систем более низкие затраты времени, материалов и средств на обустройство полигона.
Схема устройства и принцип работы системы представлены на фигурах 1-5.
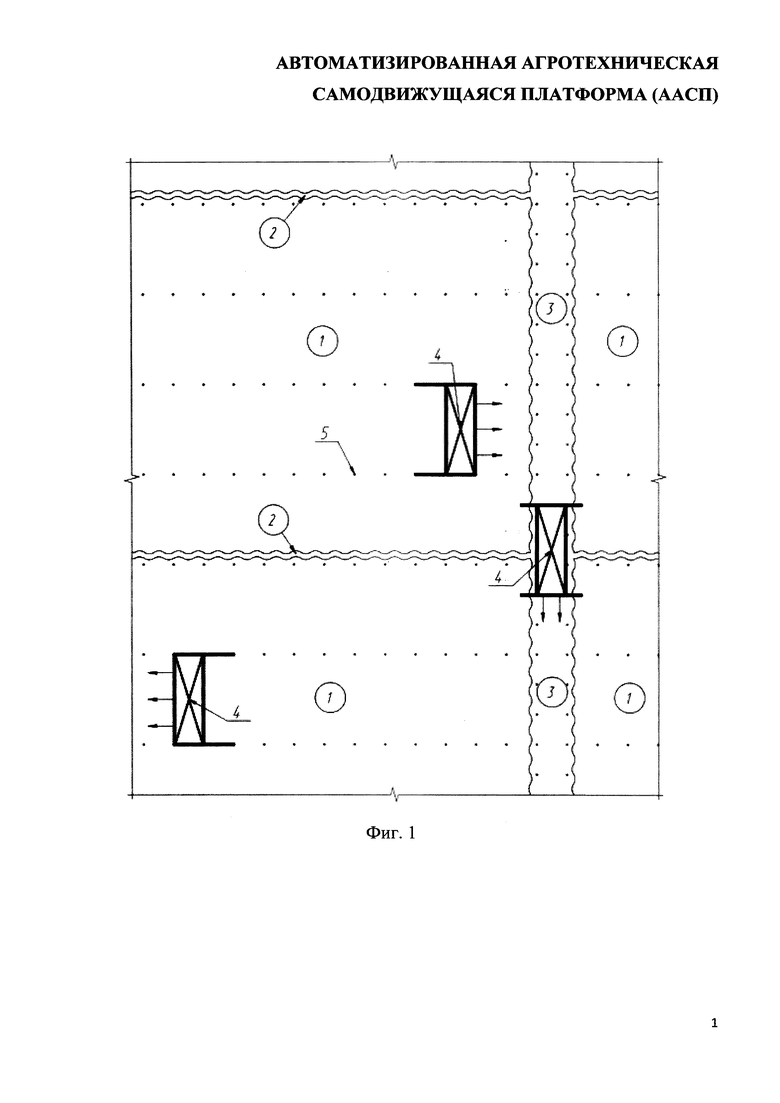
На фиг. 1 представлено оборудование полигона. Полигон состоит из участков поля (клеток) 1 заданной ширины, например 30 м (длина в зависимости от размеров участка), водозаборных каналов 2, разворотных полос (межпольных дорог) 3. Поля обрабатываются рабочими органами, расположенными на платформе 4. По краям участков полей, например, через заданное расстояние, например 10 м, на щебеночных подушках 5 размещаются опорные бетонные блоки, по которым перемещается платформа, по краям полей на разворотных полосах подушки с бетонными блоками также размещаются на определенном расстоянии, например через 10 м.
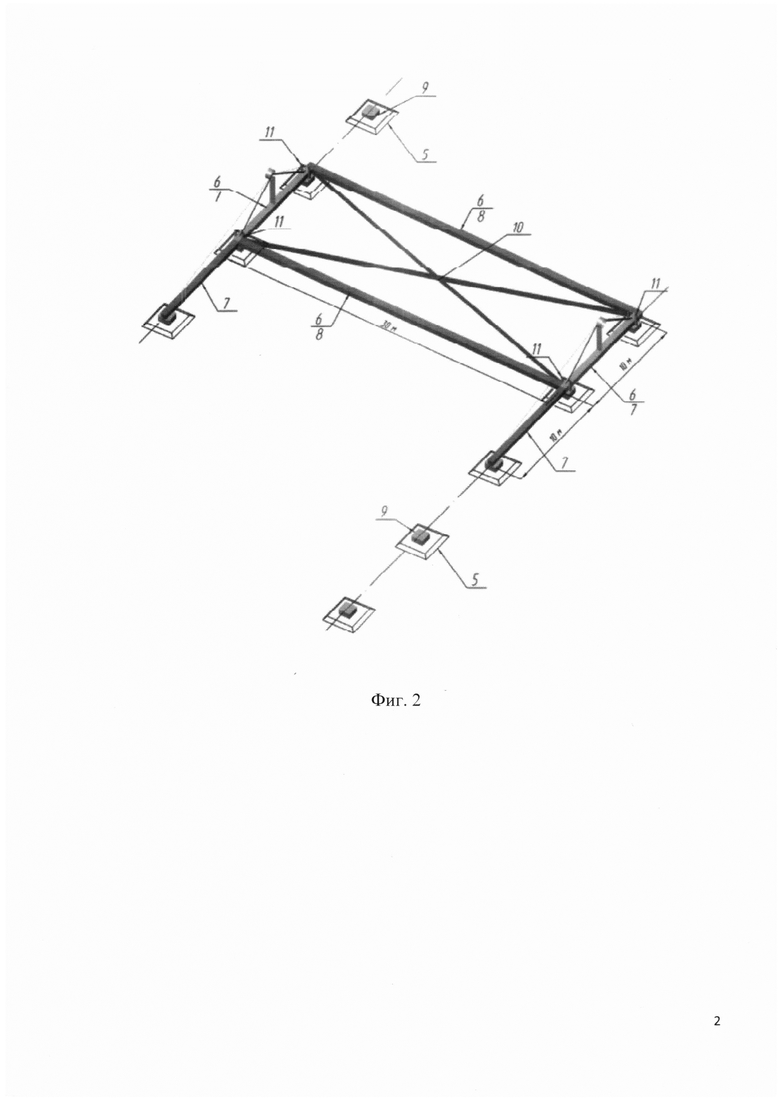
На фиг. 2 представлено принципиальное устройство самодвижущейся платформы. Платформа представляет собой раму заданного размера, например 10×30 м, из профилей П-образного сечения 6, внутри которых размещаются балки 7 и 8, они, выдвигаясь, ложатся на бетонные блоки 9, которые лежат на щебеночных подушках 5. Рабочие органы, размещенные на платформе 10, передвигаясь по длинным поперечным балкам 6, которые также являются направляющими для перемещения технологического модуля, выполняют технологические операции.
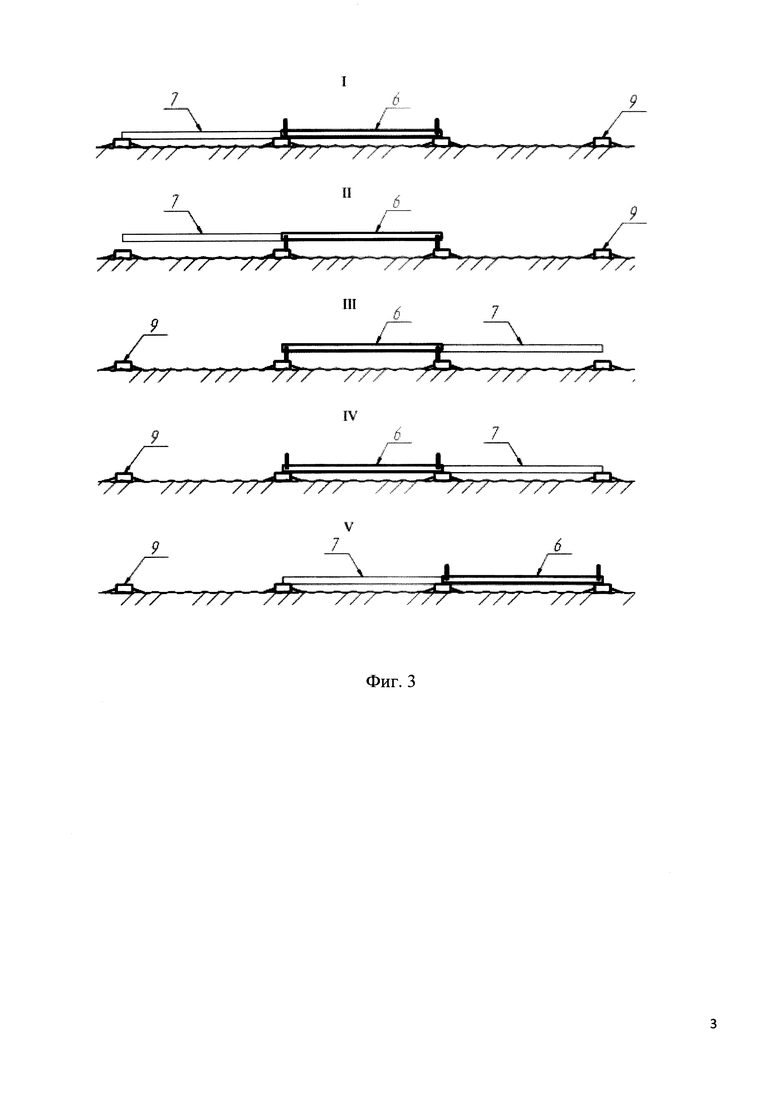
На фигуре 3 представлена схема перемещения платформы в виде пяти позиций: I-V.
В позиции I (исходной) - профиля П-образного сечения 6 платформы лежат на роликах балки 7, которая лежит на опорах 9. Рабочие органы, расположенные на платформе 10, выполняют заданную технологическую операцию;
В позиции II штоки гидроцилиндров подминают платформу, балки 7 под своим весом опускаются на ролики, закрепленные на профилях П-образного сечения 6, и перемещаются на позицию III;
В позиции IV - штоки гидроцилиндров поднимаются (расслабляются); балки 7 ложатся на опоры 9, профиля П-образного сечения 6 ложатся через ролики на балки 7 и механизмом балки вся верхняя часть платформы перемещается на позицию V, т.е. на новый участок;
В позиции V - рабочие органы выполняют заданную технологическую операцию на новом участке, т.е. система выходит на повторение процедуры I.
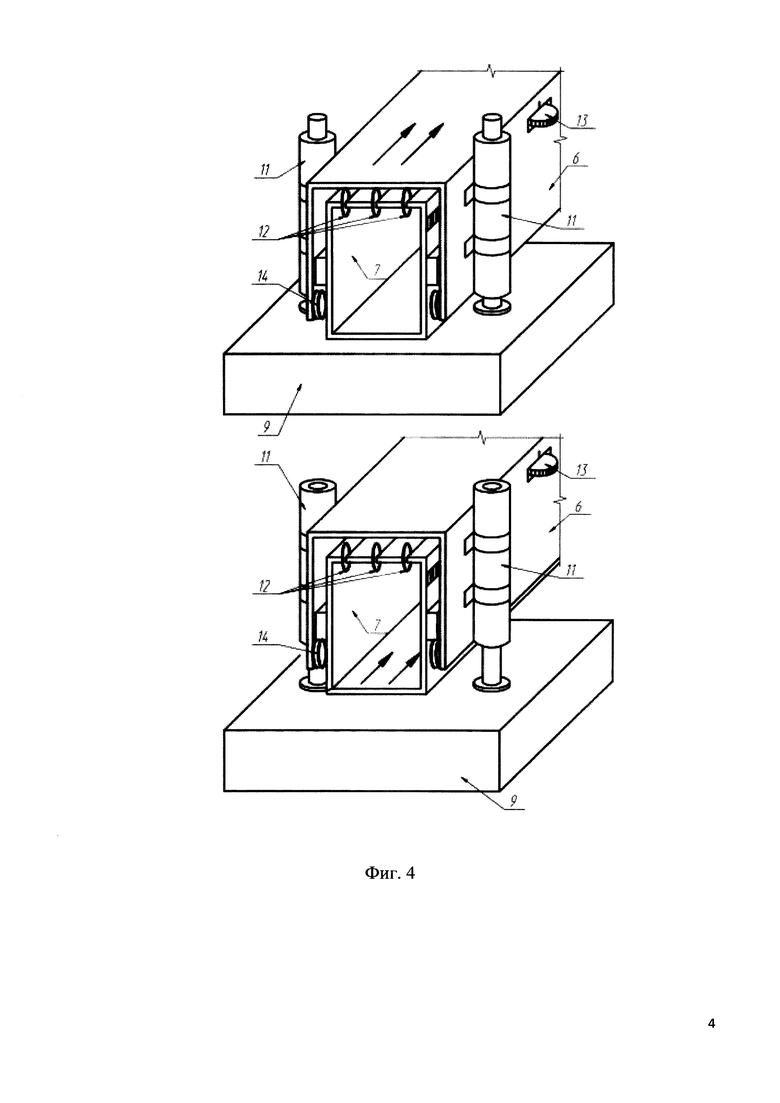
На фигуре 4 представлена схема действия механизмов передвижения внутренних балок-движителей и передвижения по ним профилей П-образного сечения платформы и в целом передвижения платформы по полю. На верхнем рисунке фигуры 4 показано передвижение платформы на новую позицию. При этом гидроцилиндры 11 находятся в расслабленном положении, профиля П-образного сечения лежат на роликах 12, смонтированных на балках 7. Балки 7 в этой позиции лежат на бетонных блоках 9. С помощью зубчатых механизмов 13 платформа по роликам 12 передвигается на новую позицию (нижний рисунок фигуры 4) на заданное расстояние, например 10 м. Выйдя на новую позицию, гидроцилиндры 11, опираясь на опоры 9, поднимают всю платформу, в результате чего внутренние балки-движители под своим весом ложатся на ролики 14, смонтированные на профилях П-образного сечения 6 балки платформы, и с помощью зубчатых шестерен 13 выдвигаются на 10 м до следующей опоры. Далее гидроцилиндры расслабляются, балки-движители ложатся на опоры, цикл завершается, давая начало следующему.
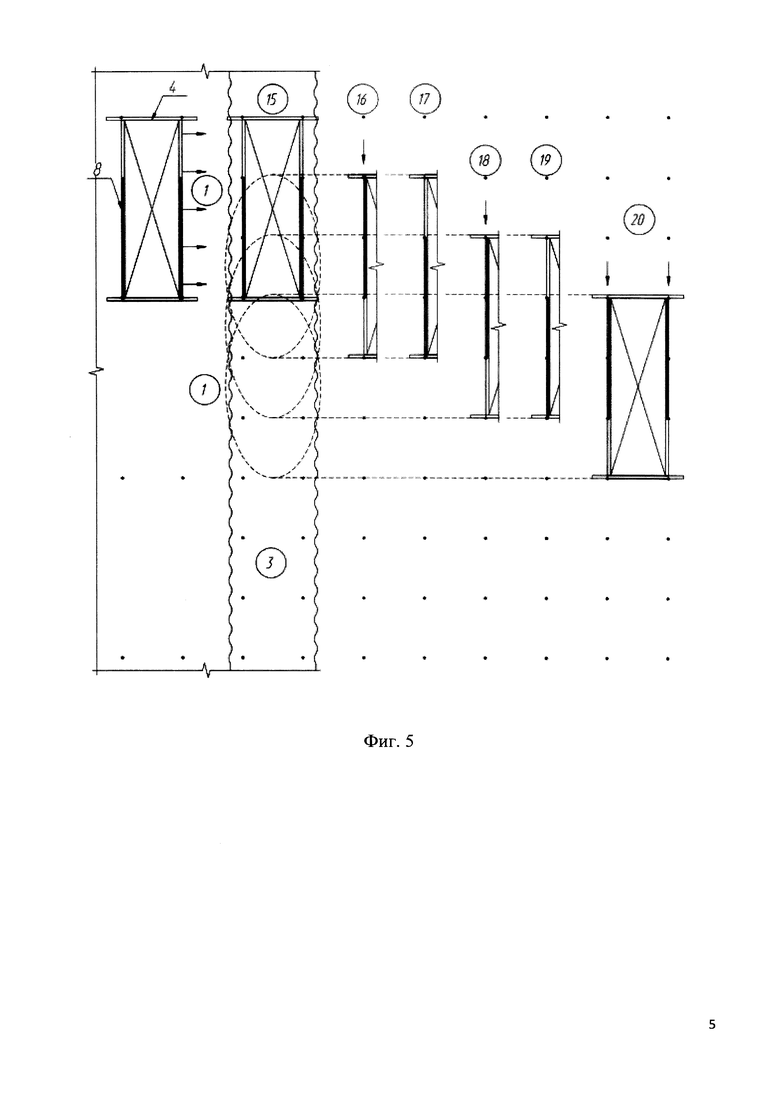
На фигуре 5 показана схема перехода платформы на очередной участок. При этом платформа передвигается по ранее описанному принципу. С помощью балок определенного размера, например 20-ти метровых балок 8, расположенных внутри длинных (например, 30-ти метровых) профилей П-образного сечения платформы, последовательно пройдя 3 положения (фиг. 5 позиции 15-20), платформа выходит на следующий участок поля 1 (в данном примере описания длина проходов составляет по 10 метров каждый). Разворотная полоса 3 выполняет роль межпольной дороги, по которой транспортными средствами поставляются необходимые материалы (семена, удобрения, убранный урожай и др.)
Обработка выполняется поперек участка технологическим модулем, оснащенным необходимым набором почвообрабатывающих и других механизмов.
Таким образом, платформа обеспечивает точное и своевременное выполнение параметров технологии возделывания сельскохозяйственных культур на высоком экологическом уровне, при значительном снижении энергозатрат, времени, материалов и средств на обустройство полигона. Обеспечивает устойчивое, ориентированное на результат снижение зависимости земледелия от погодных условий и времени суток.
Расчетная суточная производительность ААСП может составлять порядка 100 га. С учетом агротехнических сроков полевых работ одна агротехническая платформа может обеспечить весь комплекс полевых работ на площади не менее 5000 га.
Источники информации
1. Жалнин Э.В., Муфтеев Р.С. История развития и перспективы внедрения мостового растениеводства. Тракторы и с.-х. машины. 2002, №5. С. 23-30
2. С.Д. Зайцев, В.И. Прядкин, Л.С.Стреблеченко (Фииц М., Воронежская ГЛТА). Энергосредство на шинах сверхнизкого давления. Журнал "Тракторы и сельскохозяйственные машины", 2006 год, №10.
3. В чем главный недостаток струнного транспорта Юницкого? http:/www.membrana.ru/articles/technic/2002/07/29/l81600.html 17.03.2010
4. Чернышев Н.И., Сысоев Е.О. Мостовая система как основа реализации точечного земледелия. Ученые записки. - Комсомольский-на-Амуре государственный технический университет. №1-1(5). 2011. С. 113-118.
5. Жуков Ю.Н. Автоматизированный мостовой агротехнический комплекс АМАК "Сеятели и хранители". Книга 2. М.: Современник. 1992.
Изобретение относится к области сельскохозяйственного машиностроения, в частности к мостовым орудиям. Агротехническая автоматизированная самодвижущаяся платформа (ААСП) включает платформу (4) и жесткие опоры в виде щебеночных подушек (5) и бетонных блоков, по которым перемещается платформа (4). Платформа (4) представляет собой металлическую конструкцию П-образного сечения. Платформа (4) является основанием для монтажа сменных технологических агрегатов, а также движителей, обеспечивающих перемещение платформы (4) вдоль и поперек полигона. По направляющим платформы (4) перемещается технологический модуль с набором рабочих органов. Перемещаясь по направляющим, рабочий модуль выполняет заданный набор операций. Жестко фиксированные рабочие органы, компьютерное управление и установленная на платформе (4) Глобальная навигационная спутниковая система (Глонас) обеспечивают точность исполнения заданных параметров. Таким конструктивным решением обеспечивается снижение зависимости земледелия от погодных условий, повышение качества выполнения работ по подготовке почвы, посеву, уходу за растениями и уборке урожая, снижение энергозатрат на передвижение, снижение до минимума разрушительного воздействия платформы на почвенный покров, обеспечение возможности внедрения автоматизации технологических процессов с использованием средств программирования, а также обеспечение возможности высокоточной ориентации платформы в пространстве. 6 ил.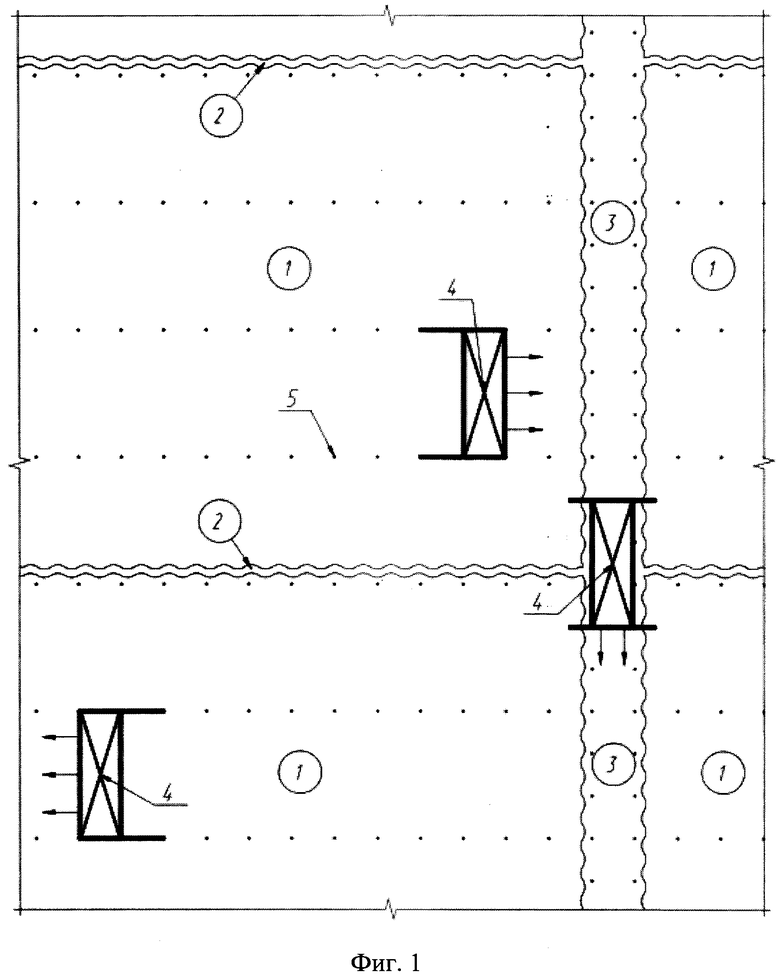
Агротехническая автоматизированная самодвижущаяся платформа, включающая платформу и жесткие опоры, выполненные в виде щебеночных подушек и бетонных блоков, по которым перемещается платформа, представляющая собой металлическую конструкцию из профилей П-образного сечения, при этом платформа является одновременно и основанием для монтажа сменных технологических агрегатов и основанием для движетелей, обеспечивающих перемещение платформы вдоль и поперек полигона, при этом технологический модуль с набором жестко зафиксированных рабочих органов перемещается по направляющим платформы, выполняя заданный набор операций, и при этом точный выход на каждое отдельное растение обеспечивается глобальной навигационной системой.
| Система мостового земледелия | 1988 |
|
SU1588295A1 |
| Мостовое устройство для выполнения сельскохозяйственных работ | 1990 |
|
SU1727580A1 |
| МОСТОВАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ СИСТЕМА | 1992 |
|
RU2076550C1 |
| ЛЕСОПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2247019C2 |
| DE 102008024696 B3, 10.09.2009 | |||
| US 1394651 A, 25.10.1921. | |||

