Область техники, к которой относится изобретение
Предлагаемое изобретение относится к лесозаготовительной технике и может быть использовано для ведения лесосечных работ в горных условиях.
Уровень техники. Автору известно а.с. № 459194 “Устройство для валки деревьев”, которое может быть использовано в лесной промышленности для машинной валки деревьев на горных склонах и в лесосеках со слабой несущей способностью грунтов. Основная цель этого устройства - механизировать валку деревьев на горных склонах. Для этого устройство выполнено с дополнительным захватно-срезающим органом, причем основной и дополнительный захватно-срезающий органы установлены на индивидуальных вертикальных штангах, соединенных между собой телескопической балкой.
Основной недостаток такого устройства заключается в следующем: если длины телескопической балки не хватает до следующего дерева, то оно не может перемещаться по лесосеке и производить валку деревьев. Кроме того, телескопическая балка не позволяет валить расположенные рядом с опорным деревом деревья, так как минимальная длина телескопической балки ограничена.
Автору известно а.с. № 529817 “Устройство для валки деревьев”, которое может быть использовано в лесной промышленности для машинной валки деревьев. Основная цель этого устройства - расширить диапазон регулирования захватно-срезающих органов по высоте. Для этого балка выполнена составной из шарнирно соединенных между собой частей, имеющих возможность поворота одна относительно другой и относительно захватно-срезающего органа при помощи гидроцилиндров.
Однако конструкция этого устройства тоже ограничена пределами расположения деревьев относительно опорного дерева. При отсутствии дерева в зоне длины манипулятора его перемещение по лесосеке прекращается, и оно не в состоянии валить деревья.
Автору известно а.с. № 643123 “Устройство для валки деревьев”, которое относится к лесной промышленности и может быть использовано для машинной валки деревьев. Основная цель этого устройства - повышение производительности при работе на горных лесосеках. Для этого устройство снабжено дополнительным манипулятором и опорной телескопической стойкой, и все манипуляторы смонтированы на стойке при помощи шарниров.
Такое устройство увеличивает устойчивость манипуляторов при валке деревьев, но оно не может без опоры на дерево перемещаться по лесосеке. Поэтому, если надо преодолеть участок лесосеки с редко расположенными деревьями, оно прекращает свою работу и не может валить деревья.
Автору известен также прототип а.с. № 954212 “Лесопромышленный робот”, который относится к лесозаготовительной технике и может быть использован для ведения лесосечных работ в горных условиях. Основная цель предлагаемого устройства - обеспечение возможности валки и пакетирования деревьев в горных условиях. Для этого он снабжен манипулятором с захватно-срезающим устройством, а платформа выполнена в виде соединенных между собой посредством вертикального круга верхней и нижней рам, привод которых имеет гидромоторы с шестернями на валах, причем рамы выполнены с овальными вырезами, снабженными зубчатыми рейками для взаимодействия с шестернями гидромоторов, а подвижные опоры выполнены в виде установленных по углам рам гидроцилиндров с опорными плитами.
Такое устройство может самостоятельно без опоры на деревья перемещаться по лесосеке, однако, имея четыре опоры и две рамы, на пересеченной местности горной лесосеки не обладает достаточной устойчивостью как в продольном, так и поперечном направлениях. Кроме того, рамы, круг и вся система перемещения лесопромышленного работа имеют большую массу, что ограничивает его перемещение по лесосеке и устойчивость в момент валки дерева, если эта масса не действует как противовес.
Сущность изобретения.
В предлагаемом лесопромышленном роботе для обеспечения устойчивости во всех направлениях при перемещении в горных условиях и снижения массы робота конструктивно к круговой платформе присоединена рабочая опора, выполненная в виде телескопического гидроцилиндра, шток которого соединен с опорной площадкой. Кроме того, корпус рабочей опоры шарнирно соединен с подвижным колесом и штоком цилиндра перемещения, круговая платформа имеет направляющий паз с ответвлениями от прямого вправо и влево с двух сторон, в котором установлен перекидной упор и подвижное колесо рабочей опоры, а перекидной упор может переправить сразу правое и левое ответвление или поочередно каждое из них. А по краям круговой платформы шарнирно под углом 120° относительно друг друга присоединены три шагающих опоры, выполненные в виде гидроцилиндров, каждый шток которого соединен с конусной площадкой, а корпус каждой шагающей опоры шарнирно соединен с двумя штоками вспомогательных гидроцилиндров и одновременно шарнирно присоединен к круговой платформе, как и корпуса вспомогательных гидроцилиндров. А в верхней части круговой платформы на поворотном круге установлен энергетический привод робота с управляющей системой, а манипулятор с захватно-срезающим органом соединен с поворотным кругом двумя вертикальными гидроцилиндрами. Кроме того, лесопромышленный робот имеет автоматическую систему поиска дерева и тактильные датчики на захватно-срезающем устройстве, обеспечивающие необходимое усилие захвата дерева и его срезания с корня.
Наличие таких отличий от прототипа позволяет сделать вывод, что предлагаемое техническое решение задачи обладает существенной новизной.
Для доказательства соответствия предлагаемой конструкции лесопромышленного робота критерию существенного отличия было проведено сравнение основных признаков с прототипом а.с. № 954212. В результате было установлено, что лесопромышленный робот содержит одну раму, три подвижные опоры, отсутствуют гидромоторы для перемещения робота, имеется система автоматического поиска дерева и тактильные датчики усилий. Все это позволяет значительно снизить рабочую массу робота и повысить его устойчивость в момент перемещения и срезания дерева с корня.
Технический результат, дающий положительный эффект по сравнению с прототипом, определяется свойствами и показателями, приведенными в табл.1.
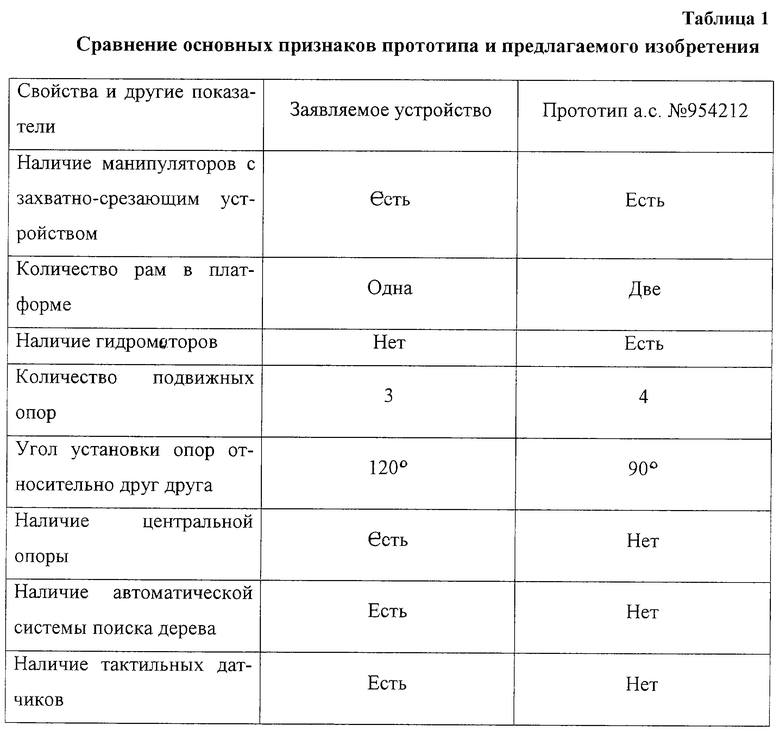
Анализ данных табл.1 показывает, что заявляемый лесопромышленный робот может быть технически реализован, так как имеет исходные параметры, которые могут быть выдержаны уже имеющимися в промышленности типовыми узлами. Перечень чертежей:
Фиг.1. Общий вид лесопромышленного работа.
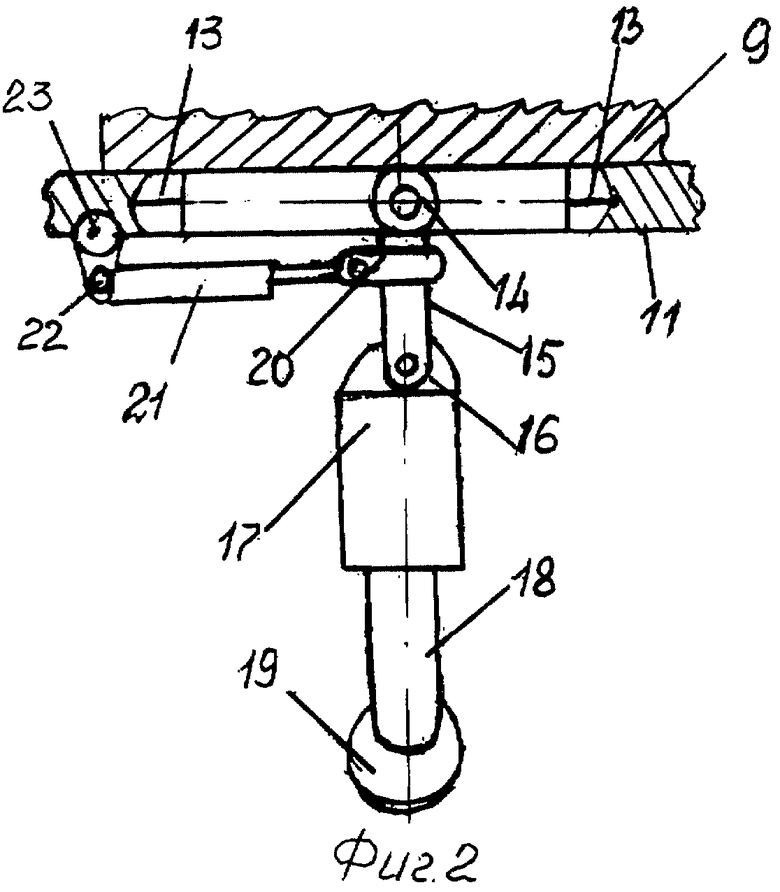
Фиг.2. Схема крепления рабочей опоры в направляющем пазу круговой платформы.
Фиг.3. Схема крепления рабочей опоры в направляющем пазу круговой платформы.
Фиг.4. Схема перемещения шагающей опоры.
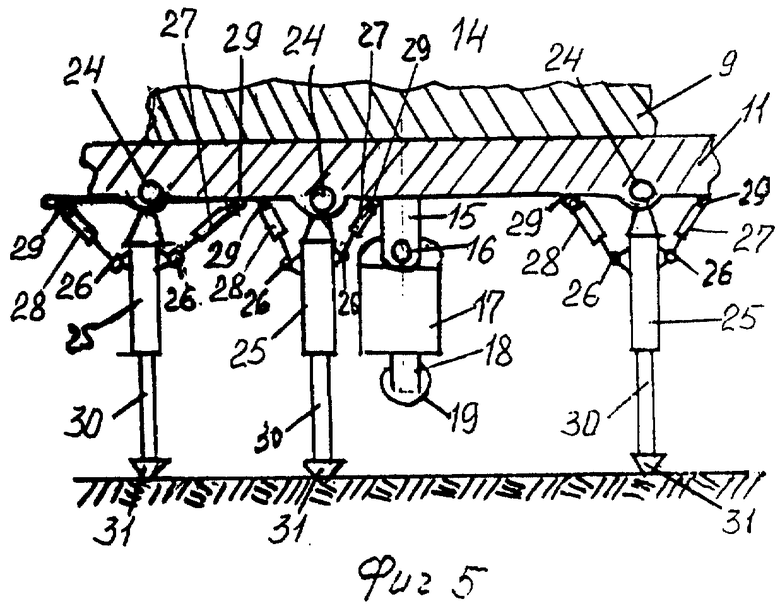
Фиг.5. Схема устойчивости лесопромышленного робота при перемещении рабочей опоры.
Фиг.6. Схема устойчивости лесопромышленного работа при перемещении шагающих опор,
Сведения, подтверждающие возможность осуществления предлагаемого изобретения
Лесопромышленный робот состоит из манипулятора 1, который оснащен захватно-срезающим устройством 2, соединенным с манипулятором горизонтальным гидроцилиндром 3 и шарниром 4. Рукоять 5 манипулятора соединена с его основанием гидроцилиндром 6, а основание - с помощью опорного шарнира 7 манипулятора и двух вертикальных гидроцилиндров 8 соединено шарнирно с поворотным кругом 9, на котором также установлена энергетическая установка 10. Поворотный круг подвижно установлен на круговой платформе 11, которая имеет специальный направляющий паз 12 с перекидными упорами 13, в котором с возможностью перемещения установлено подвижное колесо 14, соединенное с помощью кронштейна 15, шарнира 16 рабочей опоры и корпуса 17 с рабочей опорой, которая имеет шток 18 рабочей опоры и опорную площадку 19. На кронштейне закреплен направляющий шарнир 20 подвижного колеса, в свою очередь соединенный с гидроцилиндром перемещения, корпус 21 которого установлен с помощью шарнира 22 цилиндра перемещения в поворотном кронштейне 23 гидроцилиндра перемещения, установленным в круговой платформе.
По краям круговой платформы под углом 120° друг к другу установлены на подвижных шарнирах 24 корпуса три шагающие опоры, к корпусу 25 которых с помощью шарнирной опоры 26 штока вспомогательного цилиндра присоединены вспомогательные цилиндры правый 27, левый 28, а их корпуса с помощью шарнирных опор 29 присоединены к круговой платформе. Шток 30 шагающей опоры соединен с конусной площадкой 31.
Лесопромышленный робот имеет автоматическую систему 32 поиска дерева, оснащенную системой управления энергетическим приводом и гидроцилиндрами, тактильными датчиками 33 в захватно-срезающем устройстве.
Работает лесопромышленный работ следующим образом. Специальным автотранспортом лесопромышленный робот доставляется на лесосеку и устанавливается на грунт так, чтобы рабочая опорная площадка 19 рабочей опоры и конусные площадки 31 шагающих опор опирались на грунт.
После этого оператор включает систему 32 автоматического поиска дерева лесопромышленного робота, которая начинает вращать поворотный круг 9 до тех пор, пока тактильный датчик 33 не коснется дерева. Затем с помощью горизонтального цилиндра 3 и гидроцилиндра 6 и вертикальных цилиндров 8 манипулятора 1, который вращается в шарнире 7, рукоять 5 захватно-срезающего устройства 2 с помощью шарнира 4 наводится на дерево, причем положение захватно-срезающего устройства на дереве и силу его зажатия контролируют тактильные датчики 33. Как только дерево полностью зажато, поступает команда на его срезание с корня. Срезанное дерево путем разворота поворотного круга 9 с помощью манипулятора 1 укладывается на грунт в нужном направлении и поступает команда на разжим захватно-срезающего устройства 2. Когда в радиусе действия манипулятора 1 все деревья срезаны, лесопромышленный робот перемещается на новую позицию. Перемещение лесопромышленного робота может быть по прямой или с поворотом в нужном направлении. При перемещении по прямой выдается команда на рабочую опору. При этом шток 18 рабочей опоры втягивается в корпус 17 рабочей опоры и поднимает с грунта опорную площадку 19. Лесопромышленный робот остается на трех шагающих опорах, затем приводится в действие подвижное колесо 14 с помощью кронштейна 15 рабочей опоры направляющего шарнира 20, подвижного колеса 14, корпуса 21 гидроцилиндра перемещения, шарнира 22 и поворотного кронштейна 23 гидроцилиндра перемещения, подвижное колесо 14 по направляющему пазу 12 перемещается вперед. При этом перекидной упор 13 находится в положении, перекрывающем левые и правые ответвления направляющего паза 13. Как только рабочая опора передвинута в конечное положение, шток 18 рабочей опоры опускает на грунт опорную площадку 19 и выдается команда на подъем шагающих опор. Штоки 30 которых поднимают с грунта конусные площадки 31 и в зависимости от направления движения вступают в работу правый 27 и левый 28 вспомогательные цилиндры, которые с помощью шарниров 26 и 29 наклоняют корпус 25 шагающей опоры под определенным углом, вращая его на подвижном шарнире 24 корпуса шагающей опоры. В это время лесопромышленный робот стоит на рабочей опоре. Затем по команде штоки 30 шагающих опор под углом опускают на грунт конусные площадки 31 и с помощью корпусов 25 вспомогательных гидроцилиндров, перемещая круговую платформу 11, устанавливаются в вертикальное положение. Произошел шаг лесопромышленного робота. При перемещении лесопромышленного робота с поворотом операции остаются все те же, только подвижное колесо 14 с помощью гидроцилиндра перемещения с учетом положения перекидного упора 13 в направляющем пазу 12 перемещается влево или вправо, а свободному перемещению способствует шарнир 16, и соответственно этому шагающие опоры развернут круговую платформу 11 с поворотным кругом 9, энергетическим приводом 10, опорным шарниром 7 манипулятора 1 в нужном направлении. Будет сделан шаг лесопромышленного робота с поворотом. Как только робот переместился в новую позицию, опять в работу вступает система 32 автоматического поиска дерева и цикл валки деревьев повторяется.
Применение лесопромышленного робота на валке деревьев в условиях горных лесосек полностью автоматизирует эту операцию, что позволит увеличить производительность машины, а также обеспечить полностью техническую безопасность на валке деревьев в горах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лесопромышленный робот | 1981 |
|
SU954212A1 |
| СПОСОБ РАЗРАБОТКИ ЛЕСОСЕКИ С УСТРАНЕНИЕМ ЗАВИСИМОСТИ РАБОТ ОТ ПРИРОДНЫХ УСЛОВИЙ | 2007 |
|
RU2366161C2 |
| Канатная установка для валки деревьев | 1984 |
|
SU1286132A1 |
| Устройство для валки,пакетирования и транспортирования деревьев | 1979 |
|
SU927198A2 |
| Лесозаготовительная машина | 1986 |
|
SU1329681A1 |
| Каретка для валки и трелевки деревьев | 1981 |
|
SU1009846A1 |
| Устройство для валки деревьев | 1977 |
|
SU643123A1 |
| БАЗОВЫЙ МОДУЛЬ МАНИПУЛЯТОРНОЙ МАШИНЫ | 2012 |
|
RU2522496C2 |
| Устройство для валки,пакетирования и транспортирования деревьев | 1976 |
|
SU593686A1 |
| Устройство для валки,пакетирования и транспортирования деревьев | 1980 |
|
SU873973A1 |



Изобретение относится к лесозаготовительной технике и может быть использовано для ведения лесосечных работ в горных условиях. Робот содержит платформу, снабженную подвижными опорами, поворотный круг, манипулятор с захватно-срезающим устройством. К круговой платформе присоединена рабочая опора, выполненная в виде телескопического гидроцилиндра, шток которого соединен с опорной площадкой. Корпус рабочей опоры в верхней части шарнирно соединен с подвижным колесом и штоком цилиндра перемещения. Круговая платформа имеет паз с ответвлениями от прямого вправо и влево с двух сторон, в котором установлен перекидной упор и подвижное колесо рабочей опоры, а перекидной упор имеет возможность перекрывать сразу правое и левое ответвление или поочередно каждое из них. По краям круговой платформы шарнирно под углом 120° относительно друг друга присоединены три шагающих опоры, выполненные в виде гидроцилиндров, каждый шток которого соединен с конусной площадкой, а корпус каждой шагающей опоры шарнирно соединен с двумя штоками вспомогательных гидроцилиндров и одновременно шарнирно присоединен к круговой платформе, как и корпуса вспомогательных гидроцилиндров. В верхней части круговой платформы на поворотном круге установлен энергетический привод робота с управляющей системой. Манипулятор с захватно-срезающим органом соединен с поворотным кругом двумя вертикальными гидроцилиндрами. Манипулятор имеет автоматическую систему поиска дерева и тактильные датчики на захватно-срезающем органе, обеспечивающие необходимое усилие захвата дерева и его срезание с корня. Изобретение позволит повысить производительность и обеспечить техническую безопасность на валке деревьев в горах. 1 з.п. ф-лы, 6 ил.

| Лесопромышленный робот | 1981 |
|
SU954212A1 |
| Лесозаготовительная машина шагающего типа | 1982 |
|
SU1061754A1 |
| Устройство для валки,пакетирования и транспортирования деревьев | 1979 |
|
SU927198A2 |
| US 3804137 A, 16.04.1974 | |||
| US 3911980 А, 14.10.1975. | |||

