Область техники
Способ, система и устройство относятся к сельскому хозяйству и могут быть использованы в селекции, семеноводстве, выращивании посадочного материала, сортоиспытании и исследовательских работах с различными культурами для автоматизации выполнения операций с делянками (прямоугольными площадками) на поле, таких как обработка почвы, посев, посадка, подрезка, внесение удобрений, уход за растениями, уборка урожая и т.п.
Уровень техники
В последние годы наблюдается постоянный рост производительности сельскохозяйственных машин, в том числе за счёт применения различных программно-аппаратных средств автоматизации. В частности широкое распространение получили автоматические системы рулевого управления, использующие сигналы глобальных навигационных спутниковых систем (ГНСС): ГЛОНАСС, GPS, Beidou, Galileo для определения местоположения техники и выработки и исполнения маршрутов движения [1]. Так же большое значение приобретают средства планирования, управления и контроля рабочих процессов с привязкой к географическим координатам, так как они позволяют реализовать на практике максимальную теоретически возможную производительность машин и минимизировать издержки.
Однако, не смотря на распространение применения средств автоматизации в производственном сегменте сельского хозяйства, наблюдается их нехватка в первичном семеноводстве, селекции и в целом в сфере научных исследований в агрономии при выполнении специализированных операций с делянками (прямоугольными площадками) на выделенном участке поля. Как известно, успешное проведение и результаты полевых опытов критически зависят от правильных формы, размера и расположения делянок, а также повторности опытов на территории и во времени [2]. Ошибки технического характера, допущенные на любом этапе опытной работы (разбивка опытного участка, обработка почвы, внесение удобрений, посев, посадка, уход, уборка урожая и т.д.), нарушают сравнимость вариантов и искажают их эффекты. Эти ошибки не могут быть исправлены никакой математической обработкой и, следовательно, полностью обесценивают результаты опыта. Поэтому соблюдение всех технических правил проведения эксперимента в поле – важнейшее условие получения точных данных, пригодных для объективной оценки действия изучаемых в опыте агротехнических приемов или сортов.
При этом один из самых важных этапов исследования перед посевом – разбивка опытного участка, т.е. размещения опыта в натуре согласно схематическому плану, традиционно происходит вручную с использованием рулетки, шнура, вешек, колышков-реперов и т.п. [2], что требует значительного времени, хорошей погоды, участия большого количества человек, обладает низкой точностью и легко подвержено ошибкам. Стоит отметить, что ряд существующих сеялок [3-5] и существующие отдельные изобретения для автоматизации процесса высева семян [6, 7] содержат электронные средства для частичной автоматизации технологического процесса высева семян и настройки длины делянки и дорожки между делянками, снижая масштаб необходимой разбивки опытного участка. Данные средства используют информацию о вращении либо отдельного дополнительного вспомогательного колеса, либо опорного колеса сеялки, либо ведущих колес техники для вычисления пройдённого пути от начальной точки на текущем проходе (прогоне) и скорости движения, и на основе этих расчётов управляют высевающими агрегатами в зависимости от типа конкретной сеялки.
Одними из недостатков данных средств являются невысокая точность и непостоянство размеров делянок и дорожек, возникающие из-за плохого сцепления колес с почвой и пробуксовок. И не смотря на то, что могут быть предприняты дополнительные меры для повышения точности высева путём вспомогательных корректировок при пробуксовке колес как в изобретении [7], они не позволяют полностью исключить ошибки, связанные с неравномерным сцеплением колес с почвой, и ошибками при счислении пройденного пути на разных участках поля из-за неравномерности микрорельефа почвы.
Главным же недостатком указанных средств является то, что управление высевом в них основывается на одномерном местоположении вдоль текущего прохода от некоторой начальной точки, которую необходимо задавать вручную в начале каждого гона. Тем самым всё же требуется дополнительная ручная разметка на поле, что вносит дополнительную неточность в расположение делянок на соседних проходах, их смещение друг относительно друга в соседних рядах, и увеличивает вероятность дополнительных ошибок. Также такая информация об относительном положении делянок в проходе при высеве в принципе не позволяет автоматизировать последующие операции с ними на данном участке (подрезка, внесение удобрений, уход, уборка урожая и т.д.), т.е. каждая следующая операция в технологической цепочке будет выполняться отдельно в отрыве от всех остальных.
Также отдельно отметим изобретение [8], посвящённое мостовому автоматизированному комплексу прецизионного земледелия, который осуществляет автоматизацию выполнения сельскохозяйственных операций по компьютерной программе. При использовании данного комплекса земельный участок обустраивается в виде клеток-делянок шириной 10-15 м. Заметим, что это в первую очередь связано с конструктивной особенностью и механикой перемещения самодвижущейся мостовой платформы самого комплекса, которая состоит из металлических тавров шириной и длиной 10-15 м, а несущая поверхность на поле представляет собой постоянную подготовленную колею из дернины, достигшей трехлетнего возраста, шириной порядка 3 м. Тем не менее, данный комплекс может быть напрямую использован для автоматизации операций с делянками (сортовая посадка, питомники размножения и т.п.). Поэтому отметим ряд недостатков данного изобретения:
– комплекс не предполагает использования уже имеющейся сельскохозяйственной техники, так как представляет собой самодвижущуюся платформу с определёнными пределами в размерах и требует дополнительных усилий для их изменения;
– комплекс не предполагает использования уже имеющихся сельскохозяйственных орудий для работы с делянками, которые зачастую представляют собой узкоспециализированные навесные агрегаты и не являются крупносерийными изделиями, что потребует дополнительных существенных затрат и усилий для их переделки и адаптации к платформе мостового автоматизированного комплекса;
– необходимость в организации из года в год специально подготовленной колеи из дернины, которая фиксирует определённую ширину между проходами, что не позволяет при необходимости скорректировать деляночный план в любое время, выполнить его на иной территории или задать усложнённую форму с переменным расстоянием между проходами;
– также как и изобретения, рассмотренные выше, позиционирование данной платформы может иметь недостаточную точность, особенно в разных метеоусловиях, так как также зависит от сцепления колёс с колеёй и зависит от точности перемещения механики опорных систем мостового комплекса.
Раскрытие сущности изобретения
Настоящее изобретение было выполнено с учетом описанных выше проблем и недостатков известного уровня техники, и цель настоящего изобретения состоит в том, чтобы обеспечить автоматизацию процессов посадки, обработки и уборки сельскохозяйственных делянок путём использования программно-аппаратных средств, реализующих частичное или полное управление установленными (или дополнительно устанавливаемыми) исполнительными устройствами сельскохозяйственных орудий и техники на основе высокоточных данных спутниковой навигации согласно требуемому виртуальному плану деляночного участка на поле с привязкой к географическим координатам без необходимости предварительной маркировки поля.
Согласно способу по изобретению сельскохозяйственная техника оснащается программно-аппаратными средствами, включающими графический интерфейс управления, и обеспечивающими:
– определение высокоточного географического (или локально-фиксированного) местоположения, скорости и ориентации техники на основе данных инерциальных датчиков и данных либо спутниковой навигации повышенной точности с использованием одного из способов корректировки (DGPS, PPP, RTK и т.п.) в зависимости от требуемой точности, либо локальной наземной навигации (радиолокационной, ультразвуковой, оптической и т.п.);
– возможность пользователю задать виртуальный полевой план путём загрузки предварительно подготовленного файла, либо ввода базовых параметров участка (количества делянок, длины и ширины делянки, длины и ширины дорожек между делянками) и дополнительных (смещение рядов, размеры различных групп делянок и т.п.), либо иным образом;
– возможность пользователю использовать координаты предварительно подготовленного виртуального плана или при необходимости задавать/корректировать направление и координаты начала деляночного участка непосредственно на поле, используя перемещение техники;
– управление движением техники по направляющим линиям вдоль или поперёк участка по делянкам или по дорожками между ними в зависимости от выполняемой операции путем обмена данными с блоком управления техники при его наличии или с использованием дополнительно устанавливаемых на технику электрических, электрогидравлических или электромеханических рулевых средств;
– управление сельскохозяйственным орудием путем обмена данными с его управляющим устройством или непосредственный контроль отдельных исполняющих агрегатов для реализации выполняемой операции с делянками в зависимости от типа конкретной техники. Например, для зерновой селекционной сеялки – управление соленоидом дозатора, двигателем вращения вала конусных высевающих аппаратов и приводом распределительного стола, для посадочной машины – управление загрузочной платформой, для опрыскивателя – управление форсунками, для зерноуборочного комбайна или уборочной машины – управление отбором проб и т.п.;
– мониторинг и сохранение с привязкой к географическим координатам (или к координатам фиксированной локальной системы отсчета) различных показателей выполнения операций техники в зависимости от типа конкретной техники. Например, скорость трактора, для сеялок – показания датчика семян/закладочного материала, для опрыскивателя – показания датчиков расхода жидких агрохимикатов, для зерноуборочного комбайна – данные системы электронного взвешивания зерна и т.п.;
– визуализацию текущего положение техники, показателей и результатов выполняемых операций на виртуальном плане поля;
– возможность пользователю настраивать различные параметры системы, выбирать различные режимы работы, вносить корректировки и изменения.
Согласно способу автоматизации процессов посадки, обработки и уборки сельскохозяйственных делянок технологические операции исполнительных орудий динамично актуализируются и исполняются в зависимости от действительного местоположения, скорости и направления техники на плане деляночного участка. При этом при посадке происходит непосредственное размещение виртуального плана деляночного участка в натуре согласно схематическому плану c привязкой к географическим координатам (или к координатам фиксированной локальной системы отсчета) без необходимости предварительной маркировки поля. Данный план в дальнейшем может быть использован для автоматизации последующих операций на данном участке (подрезки, внесение удобрений, уход за растениями, уборка урожая и т.п.), а также повторения (или реализации нового опыта по тому же плану) на той же или иной территории через необходимое время, например через год.
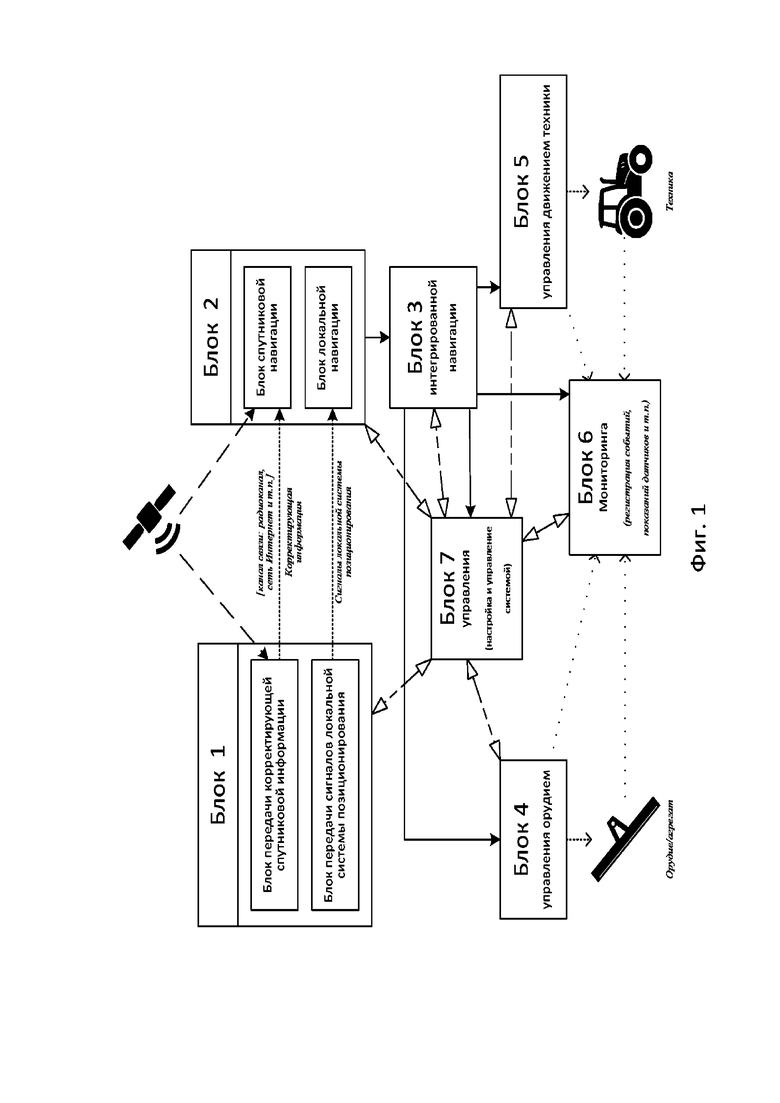
Для построения системы автоматизации процессов посадки, обработки и уборки сельскохозяйственных делянок по изобретению, предназначенной для осуществления способа по изобретению, программно-аппаратные средства, которыми оснащается техника, содержат следующие компоненты (фиг. 1):
– опциональный блок 1 приема спутниковых сигналов, генерации и передачи корректирующей спутниковой навигационной информации или сигналов локальной системы позиционирования;
– блок 2 спутниковой или локальной навигации;
– блок 3 интегрированной навигации;
– блок 4 управления сельскохозяйственным орудием;
– опциональный блок 5 управления движением техники;
– блок 6 мониторинга;
– блок 7 управления.
Система работает следующим образом. При использовании спутниковой навигации блок 1 осуществляет прием сигналов ГНСС, выработку и передачу по выбранному каналу связи (радиоканалу, по сети Интернет и т.п.) корректирующей навигационной информации (DGPS, RTK и т.п.). При использовании локальной наземной навигации блок 1 представляет собой сеть референцных станций, осуществляющих передачу радиолокационных, ультразвуковых или иных сигналов для обеспечения локального позиционирования, и/или сеть визуальных реперных точек для обеспечения оптического локального позиционирования. Блок является опциональным, т.к. вместо него источником корректирующих спутниковых навигационных данных или сигналов/реперных точек локальной системы позиционирования может выступать внешняя система.
При использовании спутниковой навигации блок 2 получает и обрабатывает корректирующую навигационную информацию от блока 1 (или внешней системы) совместно с принимаемыми сигналами ГНСС для получения высокоточного местоположения и скорости. Помимо этого блок 2 может также вычислять географическое направление техники, если используются две ГНСС антенны, а также ориентацию техники (наклон, уклон) в пространстве, если используются три антенны. При использовании локальной наземной навигации блок 2 получает от блока 1 (или внешней системы) и обрабатывает радиолокационные, ультразвуковые или иные сигналы, и/или обрабатывает данные оптических датчиков и видеокамер для получения высокоточного локального местоположения и скорости, а также опционально направления и ориентации техники в пространстве.
Блок 3 на основе данных из блока 2 и показаний инерциальных датчиков (гироскоп, акселерометр, одометр и т.п.) счисляет местоположение, скорость и ориентацию техники на поле с высокой частотой (50 Гц и выше). Внутри системы данный блок является источником данных о местоположении техники.
Блок 4 на основе данных блока 3 осуществляет управление сельскохозяйственным орудием путём контроля его отдельных исполняющих агрегатов, в том числе дополнительно устанавливаемых на орудие (при необходимости), или обмена данными с его управляющим устройством для реализации выполняемой операции с делянками в зависимости от типа конкретной техники (см. примеры в способе по изобретению).
Блок 5 на основе данных блока 3 осуществляет управление движением техники по направляющим линиям с заданной скоростью вдоль или поперёк участка по делянкам или по дорожкам между ними в зависимости от выполняемой операции и потребностей пользователя. Блок осуществляет управление движением путем обмена данными с блоком управления конкретной машины (при его наличии) или путем контроля над дополнительно устанавливаемыми на машину электрическими, электромеханическими или электрогидравлическими исполнительными устройствами. Блок является опциональным и исключается, если автоматическое управление не требуется пользователю, а движение по направляющим линиям осуществляется вручную механизатором согласно индикаторным указателям блока управления.
Блок 6 осуществляет мониторинг (наблюдение и сохранение в энергонезависимую память) различных событий и показателей выполнения операций по датчикам техники или орудия в зависимости от типа конкретной техники (см. примеры в способе по изобретению) с привязкой к географическим координатам (или к координатам фиксированной локальной системы отсчета), поступающим из блока 3.
Блок 7 управления имеет графический интерфейс и предоставляет пользователю возможность настраивать различные параметры блоков системы, выбирать различные режимы работы, определять и изменять план деляночного участка и его положение, вносить корректировки и изменения, визуализировать текущее положение техники и необходимое направление движения, показатели и результаты выполняемых операций на плане поля.
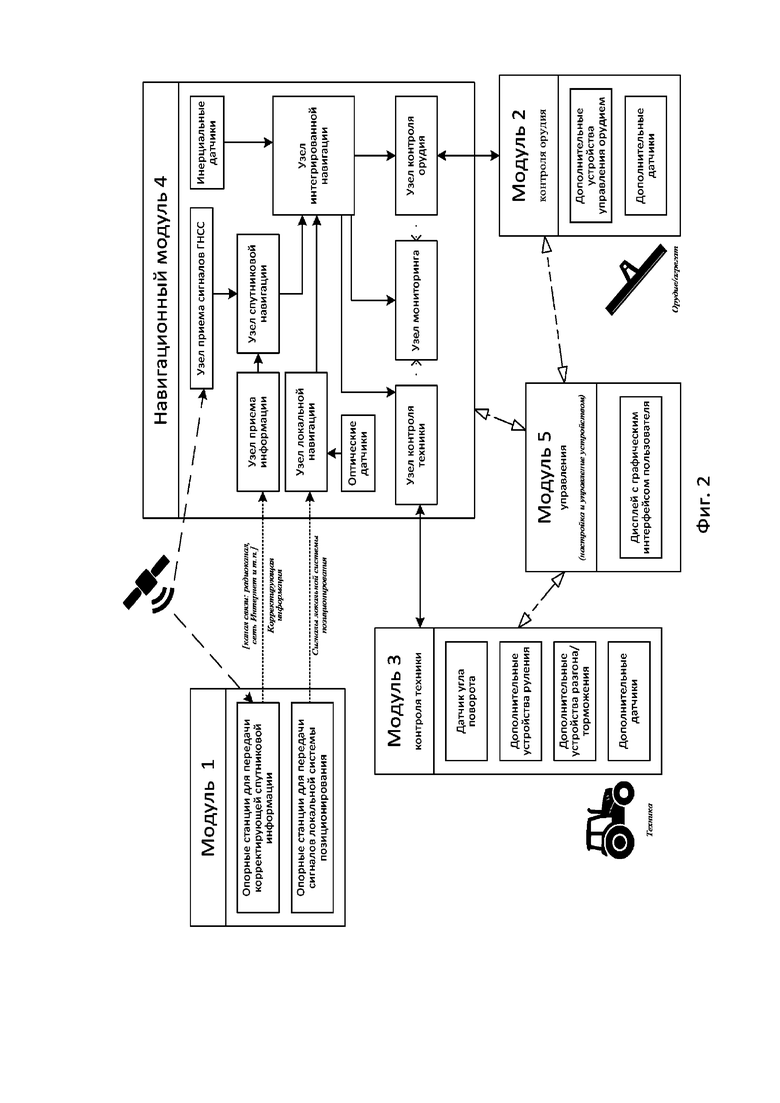
Для реализации устройства автоматизации процессов посадки, обработки и уборки сельскохозяйственных делянок по системе по изобретению и для осуществления способа по изобретению, оно содержит следующие компоненты (фиг. 2):
– опциональный модуль 1 опорной(ых) станции(й);
– опциональный модуль 2 контроля орудия;
– опциональный модуль 3 контроля техники;
– навигационный модуль 4;
– модуль управления 5.
Устройство работает следующим образом. Модуль 1 устанавливается в фиксированном месте с известными координатами на постоянной основе на каком-то строении или в поле перед началом работ. При использовании спутниковой навигации модуль осуществляет прием сигналов ГНСС, генерацию (выработку) и передачу корректирующей навигационной информации (DGPS, RTK и т.п.) по выбранному каналу связи (радиоканалу, по сети Интернет или иному) в зависимости от конкретной модификации устройства. При использовании локальной наземной навигации модуль 1 представляет собой набор опорных станций, осуществляющих передачу радиолокационных, ультразвуковых или иных сигналов для обеспечения локального позиционирования, и/или представляет собой сеть реперных визуальных точек для обеспечения оптического локального позиционирования. Модуль является опциональным, т.к. вместо него источником корректирующих спутниковых навигационных данных или сигналов локальной системы позиционирования может выступать внешняя система.
Модуль 2 в зависимости от типа орудия содержит:
– дополнительно устанавливаемые на орудие электрические, электромеханические или электрогидравлические исполнительные устройства (см. примеры в способе по изобретению);
– дополнительные датчики для мониторинга орудия (см. примеры показаний в способе по изобретению).
Отдельные части или модуль в целом являются опциональными и исключаются, если конкретное орудие уже содержит все необходимые элементы управления и датчики.
Модуль 3 в зависимости от типа техники содержит:
– датчик угла поворота, который устанавливается на машину и обеспечивает измерение текущего угла поворота техники: ведущих колес или шарнирно сочлененной рамы;
– дополнительно устанавливаемые на машину электрические, электромеханические или электрогидравлические исполнительные устройства руления;
– дополнительно устанавливаемые на машину электрические, электромеханические или электрогидравлические исполнительные устройства для разгона или торможения техники;
– дополнительные датчики для мониторинга техники (см. примеры показаний в способе по изобретению).
Отдельные части или модуль в целом являются опциональными и исключаются, если конкретная техника частично или полностью уже подготовлена к автоматическому управлению с завода, либо автоматическое руление или поддержание скорости не требуется пользователю.
При использовании спутниковой навигации навигационный модуль 4 осуществляет получение по выбранному каналу связи (радиоканалу, по сети Интернет или иному) от модуля 1 (или внешней системы) корректирующей спутниковой навигационной информации. Осуществляет прием сигналов ГНСС. Осуществляет обработку сигналов ГНСС совместно с принятой корректирующей информацией по методу DGPS, RTK, PPP или других (в зависимости от модификации устройства) и определяет высокоточное географическое местоположение и скорость. Также модуль определяет географическое направление и ориентацию техники (наклон, уклон) в пространстве, если используются две или три ГНСС антенны соответственно (в зависимости от модификации устройства).
При использовании локальной наземной навигации навигационный модуль 4 осуществляет получение от модуля 1 (или внешней системы) радиолокационных, ультразвуковых или иных сигналов локальной системы позиционирования. Осуществляет обработку этих сигналов и/или обработку данных оптических датчиков и видеокамер, устанавливаемых на технику, для получения высокоточного локального местоположения и скорости, а также опционально направления и ориентации техники в пространстве.
Навигационный модуль 4 осуществляет регистрацию показаний инерциальных датчиков (гироскоп, акселерометр, одометр и т.п.). Полученные навигационные и инерциальные данные используются модулем для вычисления местоположения, скорости и ориентации техники с высокой частотой (50Гц и выше). Модуль осуществляет вычисление местоположения различных точек техники и орудия (передней, задней оси, сошников и т.п.), согласно заданным пользователем профилям техники и орудия (набору измерений смещений различных точек машины относительно ГНСС антенны и/или навигационного модуля).
Используя полученные данные, для реализации выполняемой операции с делянками модуль осуществляет управление сельскохозяйственным орудием путем обмена данными с блоком управления конкретного орудия (при его наличии) или путем контроля над уже имеющимися или дополнительно установленными на орудии устройствами (см. модуль 2). Также модуль осуществляет управление движением техники путем обмена данными с блоком управления конкретной машины (при его наличии) или путем контроля над уже имеющимися или дополнительно установленными на технику устройствами (см. модуль 3).
Модуль 4 осуществляет сбор различных показателей и мониторинг уже имеющихся или дополнительно установленных датчиков (см. модули 2 и 3). Профили техники и орудия, план деляночного участка, режимы и параметры работы навигационный модуль получает от модуля управления 5 и передаёт ему навигационные данные, состояние работы, показатели датчиков техники или орудия (см. примеры в способе по изобретению) и иные данные для мониторинга.
Модуль управления 5 содержит дисплей и графический интерфейс с управляющими элементами, через которые пользователь может настраивать различные параметры навигационного модуля и модуля управления, выбирать различные режимы работы, определять план деляночного участка, вносить корректировки и изменения. Графический интерфейс модуля визуализирует на двумерном или трёхмерном плане поля текущее положение техники и необходимое направление движения, показатели и результаты выполняемых операций, на основе данных получаемых от навигационного модуля. Модуль управления также осуществляет постоянный мониторинг различных событий и показателей выполнения операций по получаемой информации. Модуль осуществляет хранение профилей техники и орудия, событий, показателей и результатов работ в энергонезависимой памяти, что позволяет продолжать прерванные ранее по какой-либо причине работы.
Технический результат изобретения заключается в автоматизации различных операций при работе с делянками, что позволяет сократить время выполнения и повысить точность работ, минимизировать участие человека и количество ошибок, обеспечить повторяемость и непрерывность операций на одном и том же деляночном участке вне зависимости от времени и погодных условий. Как следствие, сокращаются издержки посадочных и обрабатывающих материалов, увеличивается урожайность, чистота и точность исследовательских опытов и испытаний.
В рамках изобретения также выгодным образом обеспечивается возможность использования программно-аппаратных средств, установленных на технику и обеспечивающих определение местоположения, скорости и ориентации техники с использованием высокоточных данных спутниковой (или локальной наземной) навигации, не только для автоматизации операций с делянками, но и для других «универсальных» сельскохозяйственных операций в производственном сегменте. Как следствие, позволяя снизить общие затраты на оснащение техники навигационным оборудованием в рамках одного хозяйства.
В заключение следует отметить, что представленная система и устройство являются только примерами осуществления изобретения, хотя оно может иметь различные модификации и альтернативные формы. Специалисту в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации в пределах объема защиты. Следует также подчеркнуть, что использование в описании единственного числа применительно к различным признакам не исключает возможности их присутствия во множественном числе.
Список литературы
1. Балабанов В. И., Железова С.В., Березовский Е.В., Беленков А.И., Егоров В.В. Навигационные системы в сельском хозяйстве. Координатное земледелие. Под общ. ред. проф. В.И. Балабанова. - М.: Из-во РГАУ-МСХА им. К.А. Тимирязева, 2013. - 148 с.
2. Доспехов Б.А. Методика полевого опыта (с основами статистической обработки результатов исследований). 5-е изд., доп. и перераб. - М.: Агропромиздат, 1985. - 351 с.
3. Сеялка Plot / Row Motion. URL: https://www.wintersteiger.com/ru/Селекция-и-семеноводство/Продукция/Ассортимент/Селекционные-сеялки/361-Plot-Row-Motion
4. Сеялка Dynamic Disc Plus. URL: https://www.wintersteiger.com/ru/Селекция-и-семеноводство/Продукция/Ассортимент/Сеялки-пунктирного-посева/312-Dynamic-Disc-Plus
5. Сеялка селекционная КЛЕН – 2.8С. URL: https://ugsnabagro.ru/seyalka-selektsionnaya-klen-2-8s/
6. Патент РФ №2573765 C1 (13.10.2014).
7. Патент РФ №2789549 C1 (25.08.2022).
8. Патент РФ 2754999 C1 (06.10.2020).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ В ПОМЕЩЕНИИ И РАДИОНАВИГАЦИОННЫЙ ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2838877C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| СИСТЕМА НАВИГАЦИИ БЛИЖНЕГО ПОЛЯ | 2012 |
|
RU2602833C2 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ПАК ВТП ТС) | 2022 |
|
RU2803992C1 |
| Способ привязки устройств "Интернета вещей" и "Умного города" к географическим координатам и карте местности с повышенной точностью координат | 2020 |
|
RU2754813C1 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ПРИКЛАДНОЙ ПОТРЕБИТЕЛЬСКИЙ ЦЕНТР НАВИГАЦИОННО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ | 2014 |
|
RU2568924C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
Изобретения относятся к области сельского хозяйства. В способе осуществляют определение высокоточного географического местоположения, скорости и ориентации техники. Операции обработки почвы, посева, посадки, подрезки, внесения удобрений, ухода за растениями, уборки урожая выполняют с использованием программно-аппаратных средств, реализующих частичное или полное управление установленными или дополнительно устанавливаемыми электрическими, электрогидравлическими или электромеханическими исполнительными устройствами сельскохозяйственных орудий и техники. Управление движением техники по направляющим линиям вдоль или поперёк участка по делянкам или по дорожкам между ними в зависимости от выполняемой операции осуществляют путем обмена данными с блоком управления движения техники или с использованием дополнительно устанавливаемых на технику электрических, электрогидравлических или электромеханических исполнительных устройств. Управление сельскохозяйственным орудием путем обмена данными с его управляющим устройством или непосредственный контроль отдельных исполняющих агрегатов для реализации выполняемой операции с делянками проводят на основе высокоточных данных спутниковой навигации согласно требуемому виртуальному плану деляночного участка на поле с привязкой к географическим координатам без необходимости предварительной маркировки поля. Система содержит: опциональный блок приема спутниковых сигналов, генерации и передачи корректирующей навигационной информации; блок получения и обработки корректирующей навигационной информации совместно с принимаемыми спутниковыми сигналами для получения высокоточного местоположения и скорости; блок интегрированной навигации, определяющий местоположение, скорость и ориентацию техники на поле на основе высокоточных данных спутниковой навигации и инерциальных датчиков; блок управления сельскохозяйственным орудием или обмена данными с его управляющим устройством; опциональный блок управления движением техники; блок мониторинга различных показателей выполнения операций по датчикам техники или орудия; блок управления, позволяющий пользователю через графический интерфейс настраивать различные параметры системы, выбирать различные режимы работы, определять и изменять план деляночного участка и его положение, вносить корректировки и изменения, визуализировать текущее положение техники и необходимое направление движения, показатели и результаты выполняемых операций на плане поля. Устройство включает: опциональный модуль опорной, базовой, станции для генерации и передачи корректирующей спутниковой навигационной информации по радиоканалу или по сети Интернет; опциональный модуль контроля орудия, включающий дополнительно устанавливаемые на орудие электрические, электромеханические или электрогидравлические исполнительные устройства и датчики для мониторинга и управления орудием в зависимости от его типа; опциональный модуль контроля техники, включающий датчик угла поворота техники, дополнительно устанавливаемые на технику электрические, электромеханические или электрогидравлические исполнительные устройства руления, разгона или торможения и датчики для мониторинга и управления техникой в зависимости от её типа; навигационный модуль для получения и обработки корректирующей спутниковой навигационной информации для определения местоположения, скорости и ориентации техники на основе высокоточных данных спутниковой навигации и инерциальных датчиков, для управления сельскохозяйственным орудием или обмена данными с его управляющим устройством, для управления движением техники, для сбора различных показателей выполнения операций по датчикам техники или орудия; модуль управления с дисплеем, позволяющий пользователю через графический интерфейс настраивать различные параметры устройства, выбирать различные режимы работы, определять план деляночного участка, вносить корректировки и изменения, визуализировать текущее положение техники и необходимое направление движения, показатели и результаты выполняемых операций на двумерном или трёхмерном плане поля. Изобретения обеспечивают автоматизацию операций при работе с делянками, сокращение времени выполнения и повышение точности работ, минимизацию участия человека и количество ошибок, повторяемость и непрерывность операций на одном и том же деляночном участке вне зависимости от времени и погодных условий. 3 н. и 3 з.п. ф-лы, 2 ил.
1. Способ автоматизации процессов посадки, обработки и уборки сельскохозяйственных делянок, заключающийся в том, что осуществляют определение высокоточного географического местоположения, скорости и ориентации техники; операции обработки почвы, посева, посадки, подрезки, внесения удобрений, ухода за растениями, уборки урожая выполняют с использованием программно-аппаратных средств, реализующих частичное или полное управление установленными или дополнительно устанавливаемыми электрическими, электрогидравлическими или электромеханическими исполнительными устройствами сельскохозяйственных орудий и техники, при этом управление движением техники по направляющим линиям вдоль или поперёк участка по делянкам или по дорожкам между ними в зависимости от выполняемой операции осуществляют путем обмена данными с блоком управления движения техники или с использованием дополнительно устанавливаемых на технику электрических, электрогидравлических или электромеханических исполнительных устройств; управление сельскохозяйственным орудием путем обмена данными с его управляющим устройством или непосредственный контроль отдельных исполняющих агрегатов для реализации выполняемой операции с делянками проводят на основе высокоточных данных спутниковой навигации согласно требуемому виртуальному плану деляночного участка на поле с привязкой к географическим координатам без необходимости предварительной маркировки поля.
2. Способ по п.1, отличающийся тем, что дополнительно используются высокоточные данные локальной наземной навигации и выполнение операций может осуществляться с привязкой к координатам фиксированной локальной системы отсчета.
3. Система автоматизации процессов посадки, обработки и уборки сельскохозяйственных делянок, осуществляющая способ по п.1, автоматизирующая выполнение операций обработки почвы, посева, посадки, подрезки, внесения удобрений, ухода за растениями, уборки урожая с использованием программно-аппаратных средств, реализующих частичное или полное управление установленными или дополнительно устанавливаемыми исполнительными устройствами сельскохозяйственных орудий и техники на основе высокоточных данных спутниковой навигации согласно требуемому виртуальному плану деляночного участка на поле с привязкой к географическим координатам без необходимости предварительной маркировки поля, и содержащая:
опциональный блок приема спутниковых сигналов, генерации и передачи корректирующей навигационной информации;
блок получения и обработки корректирующей навигационной информации совместно с принимаемыми спутниковыми сигналами для получения высокоточного местоположения и скорости;
блок интегрированной навигации, определяющий местоположение, скорость и ориентацию техники на поле на основе высокоточных данных спутниковой навигации и инерциальных датчиков;
блок управления сельскохозяйственным орудием или обмена данными с его управляющим устройством;
опциональный блок управления движением техники;
блок мониторинга различных показателей выполнения операций по датчикам техники или орудия;
блок управления, позволяющий пользователю через графический интерфейс настраивать различные параметры системы, выбирать различные режимы работы, определять и изменять план деляночного участка и его положение, вносить корректировки и изменения, визуализировать текущее положение техники и необходимое направление движения, показатели и результаты выполняемых операций на плане поля.
4. Система по п.3, отличающаяся тем, что осуществляет способ по п.2 и дополнительно использует высокоточные данные локальной наземной навигации.
5. Устройство автоматизации процессов посадки, обработки и уборки сельскохозяйственных делянок, реализующее систему по п.3, осуществляющее способ по п.1, автоматизирующее выполнение операций обработки почвы, посева, посадки, подрезки, внесения удобрений, ухода за растениями, уборки урожая с использованием программно-аппаратных средств, реализующих частичное или полное управление установленными или дополнительно устанавливаемыми исполнительными устройствами сельскохозяйственных орудий и техники на основе высокоточных данных спутниковой навигации согласно требуемому виртуальному плану деляночного участка на поле с привязкой к географическим координатам без необходимости предварительной маркировки поля, и включающее:
опциональный модуль опорной, базовой, станции для генерации и передачи корректирующей спутниковой навигационной информации по радиоканалу или по сети Интернет;
опциональный модуль контроля орудия, включающий дополнительно устанавливаемые на орудие электрические, электромеханические или электрогидравлические исполнительные устройства и датчики для мониторинга и управления орудием в зависимости от его типа;
опциональный модуль контроля техники, включающий датчик угла поворота техники, дополнительно устанавливаемые на технику электрические, электромеханические или электрогидравлические исполнительные устройства руления, разгона или торможения и датчики для мониторинга и управления техникой в зависимости от её типа;
навигационный модуль для получения и обработки корректирующей спутниковой навигационной информации для определения местоположения, скорости и ориентации техники на основе высокоточных данных спутниковой навигации и инерциальных датчиков, для управления сельскохозяйственным орудием или обмена данными с его управляющим устройством, для управления движением техники, для сбора различных показателей выполнения операций по датчикам техники или орудия;
модуль управления с дисплеем, позволяющий пользователю через графический интерфейс настраивать различные параметры устройства, выбирать различные режимы работы, определять план деляночного участка, вносить корректировки и изменения, визуализировать текущее положение техники и необходимое направление движения, показатели и результаты выполняемых операций на двумерном или трёхмерном плане поля.
6. Устройство по п.5, отличающееся тем, что реализует систему по п.4, осуществляющее способ по п.2, и дополнительно использует высокоточные данные локальной наземной навигации.
| МОСТОВОЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ПРЕЦИЗИОННОГО ЗЕМЛЕДЕЛИЯ | 2020 |
|
RU2754999C1 |
| Способ интеграции систем и/или средств обеспечения навигационной и мониторинговой информацией и аппаратно-программный комплекс - центр компетенций | 2017 |
|
RU2654237C1 |
| WO 2021222705 A1, 04.11.2021 | |||
| ЭЛЕКТРОННО-ОПТИЧЕСКИЙ СПОСОБ РЕГУЛИРОВАНИЯ ТЕХНОЛОГИИ ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2009 |
|
RU2423042C2 |

