Изобретение относится к области энергомашиностроения и может быть использовано для обеспечения бесконтактного вращения ротора электрических машин.
Известен магнитный подшипник (патент РФ №2089761 С1, F16C 32/04, 10.09.1997), содержащий вал, ротор из двух колец из постоянного магнита, намагниченный в осевом направлении, статор, включающий полюсный элемент и две кольцевые катушки. В осевом зазоре между кольцами ротора установлен кольцевой диск из немагнитного материала с высокой электропроводностью.
Недостатками данного устройства являются ограниченные функциональные возможности, обусловленные отсутствием управления положением ротора электрической машины.
Известен упорный магнитный подшипник с подмагничиванием постоянным магнитным полем смещения (патент РФ №2138706 С1, F16C 32/04, F16C 39/06, 27.09.1999), содержащий вращающийся элемент (или вал) с ободом (или опорным участком) кольцевой формы, находящимся между парой зубцов подковообразного управляющего элемента. Постоянным магнитом создается магнитное поле, распространяющееся через нависающую консоль и порождающее силу притяжения между подмагниченными поверхностью консоли и верхней торцевой поверхностью вала. Эта смещающая сила притяжения поддерживает вал в равновесии так, что обод находится между поверхностями пары зубцов и равноудален от них. Внутри подковообразного управляющего элемента вокруг вала намотаны обмотки.
Недостатками данного устройства являются сложность системы управления, а также значительные потери на вихревые токи в магнитном подшипнике при высоких частотах вращения ротора.
Известна опора (патент РФ №2178243 С2, Н05Н 1/00, 10.01.2002), содержащая установленный в корпусе цилиндрический аксиально намагниченный магнит, размещенную на роторе соосно ферромагнитную втулку, расположенную напротив нижнего торца магнита, и кольцевую камеру с демпфирующей жидкостью. Камера снабжена внутри радиально подвижным кольцевым элементом, подвешенным на гибких нитях и состоящим из внутреннего ферромагнитного кольца и связанного с ним наружного немагнитного кольца.
Недостатками данного устройства являются ограниченные функциональные возможности, обусловленные отсутствием управления положением ротора электрической машины.
Известен радиальный подшипник на магнитной подвеске (патент РФ 2264565 С2, F16C 32/04, 20.11.2005), содержащий вал, корпус, кольцевые постоянные магниты, страховочные радиальные механические подшипники, торцевой подшипник, внешние экраны из диамагнетика, наружные и внутренние кольца кольцевых постоянных магнитов снабжены экранами для обеспечения одного работающего полюса. Кольцевой постоянный магнит внутреннего кольца расположен на оси с возможностью создания неэкранированным полюсом магнитного поля впереди себя в радиальном направлении, а кольцевой постоянный магнит наружного кольца - с возможностью создания неэкранированным полюсом магнитного поля, направленного навстречу полю кольцевого постоянного магнита внутреннего кольца.
Недостатками данного устройства являются повышенные массогабаритные показатели электрической машины, вызванные способом установки механических подшипников, и ограниченные функциональные возможности, обусловленные отсутствием управления положением ротора электрической машины.
Наиболее близким по технической сущности и достигаемому результату к гибридному магнитному подшипнику с использованием сил Лоренца (Novel High-Speed, Lorentz-Type, Slotless Self Bearing Motor // 2010 IEEE Energy Conversion Congress and Exposition pp. 3971-3977) является подшипник, содержащий беспазовый статор, в котором уложена основная обмотка, n-полюсный ротор с бандажной втулкой, управляющую m-фазную обмотку, установленную поверх основной обмотки электрической машины, в которой установлен гибридный магнитный подшипник, электрически соединенную с системой управления, при этом основная обмотка выполнена для n-полюсного ротора, а управляющая обмотка подшипника - для 2n-полюсного ротора, причем частота тока основной обмотки и дополнительной равны.
Недостатками данного устройства являются невысокая тяговая сила в воздушном зазоре магнитных подшипников, перегрев ротора, обусловленный током, протекающим по дополнительной обмотке, возможность управления положением ротора только в радиальном направлении.
Задача изобретения - расширение функциональных возможностей за счет введения управления положением ротора и в осевом направлении, снижение массогабаритных показателей гибридного магнитного подшипника и перегрева ротора при одновременном увеличении его тяговой силы в воздушном зазоре благодаря использованию совместно с магнитными подшипниками на силах Лоренца магнитных подшипников на постоянных магнитах, снижение уровня вибраций в гибридном магнитном подшипнике благодаря применению пассивного демпфера.
Техническим результатом является повышение устойчивости ротора на гибридных магнитных подшипниках и его управляемости, а также снижение потребления энергии на управление положением ротора.
Поставленная задача решается и указанный технический результат по первому варианту достигается тем, что в гибридном магнитном подшипнике с использованием сил Лоренца, содержащем беспазовый статор, в котором уложена основная обмотка, n-полюсный ротор с бандажной втулкой, управляющую m-фазную обмотку, установленную поверх основной обмотки электрической машины, в которой установлен гибридный магнитный подшипник, электрически соединенную с системой управления, при этом основная обмотка выполнена для n-полюсного ротора, а управляющая обмотка подшипника - для 2n-полюсного ротора, причем частота тока основной обмотки и дополнительной равны, согласно изобретению введены две управляющие m-фазные обмотки, расположенные одна над другой, при этом нижняя m-фазная обмотка выполнена со скосом, а верхняя m-фазная обмотка - без скоса, на левом конце вала установлен радиально аксиальный магнитный подшипник на постоянных магнитах, состоящий из внутреннего и внешнего наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, и аксиального магнитного кольца, установленного с радиальным воздушным зазором относительно вала и аксиальным воздушным зазором относительно внутреннего и внешнего наборов радиальных магнитных колец, а на правом конце вала - радиальный магнитный подшипник на постоянных магнитах, состоящий из внутреннего и внешнего наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, при этом наборы внутренних постоянных магнитов запрессованы в бандажную втулку, которая выполнена из электропроводящего материала и выполняет функцию пассивного демпфера.
Поставленная задача решается и указанный технический результат по второму варианту достигается тем, что в гибридном магнитном подшипнике с использованием сил Лоренца, содержащем беспазовый статор, в котором уложена основная обмотка, n-полюсный ротор с бандажной втулкой, управляющую m-фазную обмотку, установленную поверх основной обмотки электрической машины, в которой установлен гибридный магнитный подшипник, электрически соединенную с системой управления, при этом основная обмотка выполнена для n-полюсного ротора, а управляющая обмотка подшипника - для 2n-полюсного ротора, причем частота тока основной обмотки и дополнительной равны, согласно изобретению на левом конце вала установлен левый радиальный магнитный подшипник на постоянных магнитах, состоящий из внутреннего и внешнего наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, в котором расположена кольцевая обмотка, а на правом конце вала - правый радиальный магнитный подшипник на постоянных магнитах, состоящий из внутреннего и внешнего наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, в котором расположена кольцевая обмотка, при этом наборы внутренних постоянных магнитов запрессованы в бандажную втулку, которая выполнена из электропроводящего материала и выполняет функцию пассивного демпфера.
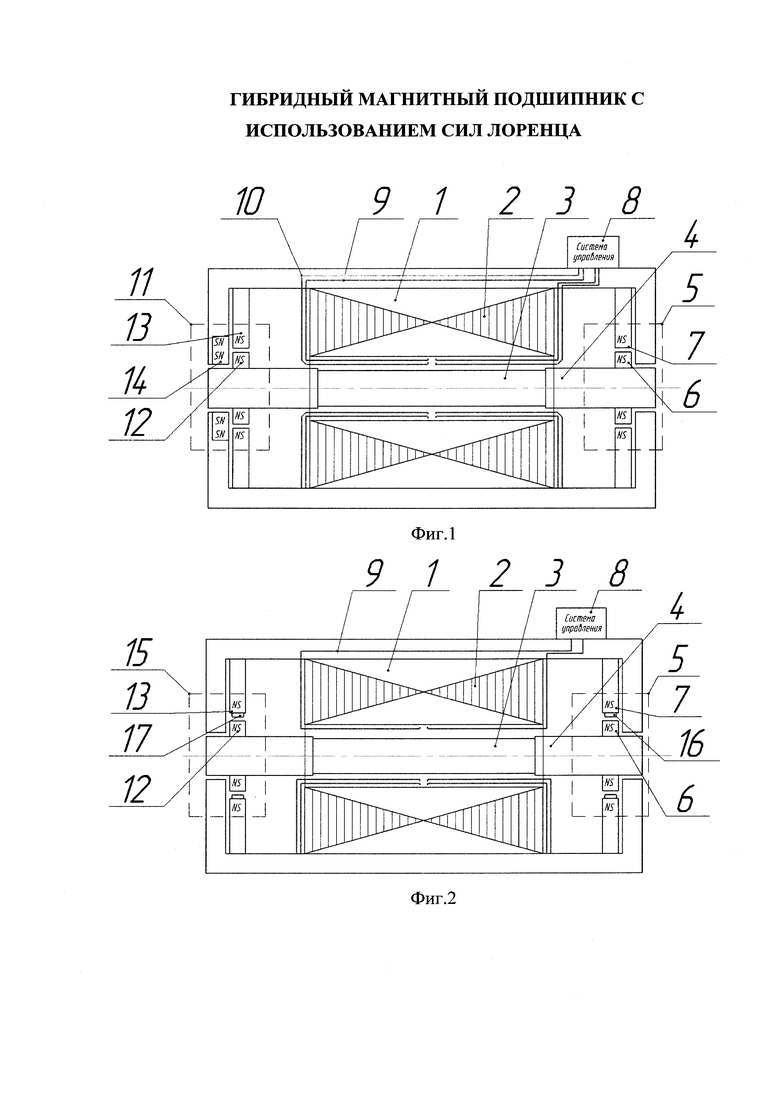
Существо изобретения поясняется чертежами. На фиг. 1 изображен продольный разрез гибридного магнитного подшипника с использованием сил Лоренца по первому варианту. На фиг. 2 изображен продольный разрез гибридного магнитного подшипника с использованием сил Лоренца по второму варианту.
Предложенное устройство по первому варианту содержит (фиг. 1): беспазовый статор 1, в котором уложена основная обмотка 2, n-полюсный ротор 3 с бандажной втулкой 4, правый радиальный магнитный подшипник на постоянных магнитах 5, состоящий из внутреннего 6 и внешнего 7 наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, систему управления 8, электрически соединенную с верхней управляющей m-фазной обмоткой 9 и нижней управляющей m-фазной обмоткой 10, выполненной со скосом, установленные поверх основной обмотки 2 левый радиально аксиальный магнитный подшипник на постоянных магнитах 11, состоящий из внутреннего 12 и внешнего 13 наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, и аксиального магнитного кольца 14, установленного с радиальным воздушным зазором относительно вала и аксиальным воздушным зазором относительно внутреннего и внешнего наборов радиальных магнитных колец, при этом наборы внутренних постоянных магнитов запрессованы в бандажную втулку 4, которая выполнена из электропроводящего материала и выполняет функцию пассивного демпфера.
Предложенное устройство по второму варианту содержит (фиг. 2): беспазовый статор 1, в котором уложена основная обмотка 2, n-полюсный ротор 3 с бандажной втулкой 4, правый радиальный магнитный подшипник на постоянных магнитах 5, состоящий из внутреннего 6 и внешнего 7 наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, систему управления 8, электрически соединенную с управляющей m-фазной обмоткой 9, установленные поверх основной обмотки 2, внутренний 12 и внешний 13 набор радиальных магнитных колец, образующих левый радиальный магнитный подшипник на постоянных магнитах 15, установленных концентрично относительно друг друга с воздушным зазором, при этом наборы внутренних постоянных магнитов запрессованы в бандажную втулку 4, которая выполнена из электропроводящего материала и выполняет функцию пассивного демпфера, вдобавок в воздушном зазоре правого радиального магнитного подшипника на постоянных магнитах 5 расположена кольцевая обмотка 16, а в воздушном зазоре левого радиального магнитного подшипника на постоянных магнитах 15 расположена кольцевая обмотка 17.
Гибридный магнитный подшипник с использованием сил Лоренца по первому варианту работает следующим образом: при протекании тока по нижней управляющей m-фазной обмотке 10 на ротор воздействуют радиальные силы, которые его уравновешивают в радиальном направлении, направление данных сил определяется правилом левой руки, при этом благодаря скосу нижней m-фазной обмотки 10 на ротор воздействует и аксиальная сила, которую уравновешивает радиально аксиальный магнитный подшипник на постоянных магнитах 11 за счет сил отталкивания между аксиальным магнитным кольцом 14 и набором радиальных магнитных колец 12. Величина радиальных и аксиальных сил, создаваемых нижней управляющей m-фазной обмоткой 10, пропорциональна силе тока, протекающей по ней. При смещении ротора в аксиальном направлении сила тока в нижней m-фазной обмотке 6 изменяется, при этом изменяются силы в аксиальном направлении, что позволяет компенсацию смещения ротора в аксиальном направлении, но при этом также изменяются силы и в радиальном направлении, для компенсации которых системой управления подается ток на верхнюю управляющую m-фазную обмотку 9. Тем самым достигается возможность управления положением ротора в осевом направлении. При этом для увеличения тяговой силы и снижения потребляемого тока верхней m-фазной обмоткой 9 и нижней управляющей m-фазной обмоткой 10, а также для снижения перегрева ротора используются радиально аксиальный магнитный подшипник на постоянных магнитах 11 и радиальный магнитный подшипник на постоянных магнитах 5, которые обеспечивают левитацию ротора при минимальном токе в управляющей m-фазной верхней обмотке 9 и нижней управляющей m-фазной обмотке 10. Кроме того, так как в управляющей m-фазной верхней обмотке 9 ток протекает только для компенсации радиальных сил, то перегрев ротора минимален. Так как бандажная втулка выполнена из электропроводящего материала, то при вибрациях ротора в ней будут наводиться вихревые токи, которые будут снижать уровень вибраций в гибридном магнитном подшипнике, то есть бандажная оболочка выполняет функцию пассивного демпфера.
Гибридный магнитный подшипник с использованием сил Лоренца по второму варианту работает следующим образом: при протекании тока по управляющей m-фазной обмотке 9 на ротор воздействуют радиальные силы, которые его уравновешивают в радиальном направлении, направление данных сил определяется правилом левой руки, при этом благодаря протеканию тока по кольцевым обмоткам 16 и 17 возникают аксиальные силы, которые уравновешивает ротор в аксиальном направлении. Величина радиальных и аксиальных сил, создаваемых управляющей m-фазной обмоткой 9 и кольцевыми обмотками 16, 17, пропорциональна силе тока, протекающей по ним. При смещении ротора в аксиальном направлении сила тока в кольцевых обмотках 16 или 17 (в зависимости от направления смещения) изменяется, при этом изменяются силы в аксиальном направлении, что позволяет компенсацию смещения ротора в аксиальном направлении. Тем самым достигается возможность управления положением ротора в осевом направлении. При этом для увеличения тяговой силы и снижения потребляемого тока m-фазной обмоткой 9, а также для снижения перегрева ротора используются левый радиальный магнитный подшипник на постоянных магнитах 15 и правый радиальный магнитный подшипник на постоянных магнитах 5, которые обеспечивают левитацию ротора при минимальном токе в управляющей m-фазной обмотке 9. Так как бандажная втулка выполнена из электропроводящего материала, то при вибрациях ротора в ней будут наводиться вихревые токи, которые будут снижать уровень вибраций в гибридном магнитном подшипнике, то есть бандажная оболочка выполняет функцию пассивного демпфера.
Итак, заявляемое изобретение позволяет расширить функциональные возможности за счет введения управления положением ротора в осевом направлении, снизить массогабаритные показатели гибридного магнитного подшипника и перегрев ротора при одновременном увеличении его тяговой силы в воздушном зазоре благодаря использованию совместно с магнитными подшипниками на силах Лоренца магнитных подшипников на постоянных магнитах, снизить уровень вибраций в гибридном магнитном подшипнике благодаря применению пассивного демпфера, выполненного в виде бандажной втулки ротора.
Таким образом, достигается повышение устойчивости ротора на гибридных магнитных подшипниках и его управляемости, а также снижение потребления энергии на управление положением ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспазовый синхронный генератор с интегрированным магнитным подвесом | 2016 |
|
RU2647490C1 |
| МОДУЛЬНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ (МВЭП) | 2006 |
|
RU2310966C1 |
| СВЕРХВЫСОКООБОРОТНЫЙ МИКРОГЕНЕРАТОР | 2017 |
|
RU2656869C1 |
| ГОМОПОЛЯРНЫЙ МАГНИТНЫЙ ПОДШИПНИК ДЛЯ ВЫСОКОСКОРОСТНЫХ ЭЛЕКТРИЧЕСКИХ МАШИН | 2017 |
|
RU2660447C1 |
| УПРАВЛЯЕМЫЙ МАГНИТНЫЙ ПОДШИПНИК НА ПОСТОЯННЫХ МАГНИТАХ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2563884C2 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2436221C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ БЕСКОНТАКТНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437202C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| Вентильный электродвигатель и способ его настройки | 1989 |
|
SU1772875A1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ОБРАЩЕННЫЙ ВЕТРОГЕНЕРАТОР | 2006 |
|
RU2331792C2 |
Изобретение относится к области энергомашиностроения и может быть использовано для обеспечения бесконтактного вращения ротора электрических машин. Отличие по первому варианту гибридного магнитного подшипника с использованием сил Лоренца состоит в том, что введены две управляющие m-фазные обмотки, расположенные одна над другой, при этом нижняя m-фазная обмотка выполнена со скосом, а верхняя m-фазная обмотка - без скоса, на левом конце вала установлен радиально аксиальный магнитный подшипник на постоянных магнитах, состоящий из внутреннего и внешнего наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, и аксиального магнитного кольца, установленного с радиальным воздушным зазором относительно вала и аксиальным воздушным зазором относительно внутреннего и внешнего наборов радиальных магнитных колец, а на правом конце вала - радиальный магнитный подшипник на постоянных магнитах, состоящий из внутреннего и внешнего наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, при этом наборы внутренних постоянных магнитов запрессованы в бандажную втулку, которая выполнена из электропроводящего материала и выполняет функцию пассивного демпфера. Отличие по второму варианту гибридного магнитного подшипника с использованием сил Лоренца состоит в том, что на левом конце вала установлен левый радиальный магнитный подшипник на постоянных магнитах, состоящий из внутреннего и внешнего наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, в котором расположена кольцевая обмотка, а на правом конце вала - правый радиальный магнитный подшипник на постоянных магнитах, состоящий из внутреннего и внешнего наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, в котором расположена кольцевая обмотка, при этом наборы внутренних постоянных магнитов запрессованы в бандажную втулку, которая выполнена из электропроводящего материала и выполняет функцию пассивного демпфера. Технический результат: повышение устойчивости ротора на гибридных магнитных подшипниках и его управляемости, а также снижение потребления энергии на управление положением ротора. 2 н.п. ф-лы, 2 ил.
1. Гибридный магнитный подшипник с использованием сил Лоренца, содержащий беспазовый статор, в котором уложена основная обмотка, n-полюсный ротор с бандажной втулкой, управляющую m-фазную обмотку, установленную поверх основной обмотки электрической машины, в которой установлен гибридный магнитный подшипник, электрически соединенную с системой управления, при этом основная обмотка выполнена для n-полюсного ротора, а управляющая обмотка подшипника - для 2n-полюсного ротора, причем частота тока основной обмотки и дополнительной равны, отличающийся тем, что введены две управляющие m-фазные обмотки, расположенные одна над другой, при этом нижняя m-фазная обмотка выполнена со скосом, а верхняя m-фазная обмотка - без скоса, на левом конце вала установлен радиально аксиальный магнитный подшипник на постоянных магнитах, состоящий из внутреннего и внешнего наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, и аксиального магнитного кольца, установленного с радиальным воздушным зазором относительно вала и аксиальным воздушным зазором относительно внутреннего и внешнего наборов радиальных магнитных колец, а на правом конце вала - радиальный магнитный подшипник на постоянных магнитах, состоящий из внутреннего и внешнего наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, при этом наборы внутренних постоянных магнитов запрессованы в бандажную втулку, которая выполнена из электропроводящего материала и выполняет функцию пассивного демпфера.
2. Гибридный магнитный подшипник с использованием сил Лоренца, содержащий беспазовый статор, в котором уложена основная обмотка, n-полюсный ротор с бандажной втулкой, управляющую m-фазную обмотку, установленную поверх основной обмотки электрической машины, в которой установлен гибридный магнитный подшипник, электрически соединенную с системой управления, при этом основная обмотка выполнена для n-полюсного ротора, а управляющая обмотка подшипника - для 2n-полюсного ротора, причем частота тока основной обмотки и дополнительной равны, отличающийся тем, что на левом конце вала установлен левый радиальный магнитный подшипник на постоянных магнитах, состоящий из внутреннего и внешнего наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, в котором расположена кольцевая обмотка, а на правом конце вала - правый радиальный магнитный подшипник на постоянных магнитах, состоящий из внутреннего и внешнего наборов радиальных магнитных колец, установленных концентрично относительно друг друга с воздушным зазором, в котором расположена кольцевая обмотка, при этом наборы внутренних постоянных магнитов запрессованы в бандажную втулку, которая выполнена из электропроводящего материала и выполняет функцию пассивного демпфера.
| СИСТЕМА НА ГИБРИДНЫХ МАГНИТНЫХ ПОДШИПНИКАХ | 2014 |
|
RU2547450C1 |
| РАДИАЛЬНЫЙ ПОДШИПНИК НА МАГНИТНОЙ ПОДВЕСКЕ | 2003 |
|
RU2264565C2 |
| ПОДШИПНИК СИСТЕМЫ ЭНЕРГОНЕЗАВИСИМОГО АКТИВНОГО МАГНИТНОГО ПОДВЕСА РОТОРА | 2003 |
|
RU2246644C1 |
| СПОСОБ РАЗГРУЗКИ ПОДШИПНИКОВ ЭЛЕКТРОМЕХАНИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ ЭНЕРГИИ | 2014 |
|
RU2557333C1 |
| US 5739609 A, 14.04.1998. | |||

