Изобретение касается лестничных скиповых подъемников с признаками ограничительной части пункта 1 формулы изобретения.
Такой лестничный подъемник известен из ЕР 0525141 B1. При такой конструкции имеются в наличии сразу четыре приводных ролика, которые приводятся в действие, тем не менее, общим приводным блоком. Этот приводной блок выполнен как приводной двигатель с конической передачей на один из приводных роликов, от которого приводные усилия передаются на остальные три приводных ролика. Для этого между соседними приводными роликами предусмотрены зубчатые передачи. Между находящимися на расстоянии друг от друга приводными роликами приводное усилие передается посредством цепного привода. Необходимые для упомянутых передаточных механизмов шестерни, цепные звездочки и цепи требуют высокой точности для свободной от люфтов, надежной эксплуатации и, соответственно, трудоемко уже одно шасси такого лестничного подъемника, который требует, кроме того, высоких затрат на техническое обслуживание.
В основе изобретения лежит задача создать лестничный подъемник упомянутого вначале вида, который имеет простую кинематику в сочетании с высоким стандартом надежности.
Эта задача в лестничном подъемнике с верхним ходовым рельсом и нижним ходовым рельсом и с направляемым по ним шасси, которое имеет четыре связанных с приводным блоком приводных ролика, причем первые два приводных ролика и вторые два приводных ролика находятся в контакте с фрикционным соединением с верхним ходовым рельсом на обращенных друг от друга сторонах этого ходового рельса, и на шасси для стабилизации его положения по вертикали установлены опорные ролики с возможностью прокатывания по нижнему ходовому рельсу, согласно изобретению решается тем, что каждый из приводных роликов имеет собственный приводной блок в форме редукторного двигателя, редуктор которого выполнен самотормозящим, причем приводной ролик соединен с выходным валом редуктора, шасси имеет раму с жестко укрепленным на ней носителем и подвижным на ней носителем, из которых оба проходят в направлении движения, и на которых в направлении движения последовательно расположены по два приводных ролика с их редукторными двигателями, причем подвижный носитель может поворачиваться вокруг оси, перпендикулярной к направлению движения, а также расположен с изменяемым интервалом по отношению к жестко установленному носителю и нагружен в направлении к ходовому рельсу прижимной силой посредством упруго сжатого раскоса.
Каждый из четырех приводных роликов смонтирован в подшипниках с возможностью поворота вокруг перпендикулярных к направлению движения осей (А).
Один из четырех приводных роликов может поворачиваться дополнительно вокруг оси (В), и эта ось (В) поворота параллельна оси вращения этого приводного ролика.
Подвижный носитель состоит из первого несущего кронштейна и подвижного относительно него - вокруг оси поворота (В) - второго несущего кронштейна, причем на каждом из обоих несущих кронштейнов расположен приводной ролик с его редукторным двигателем.
Подвижный носитель смонтирован в подшипниках с возможностью поворота на теле оси, которая присоединяется подобно кривошипу эксцентрично к поворотному валу, который смонтирован в подшипниках на раме и на который без возможности проворачивания насажен поворотный рычаг, с которым с другой стороны шарнирно соединен укрепленный на раме передающий прижимную силу раскос.
Указанный технический результат достигается также лестничным подъемником с верхним ходовым рельсом и нижним ходовым рельсом и с направляемым по ним шасси, которое имеет четыре связанных с приводным блоком приводных ролика, причем, каждые два из приводных роликов прижимаются с фрикционным соединением к одному из ходовых рельсов на обращенных друг от друга сторонах этого ходового рельса, каждые два приводных ролика установлены на одной несущей плите с размещением их на одной стороне этих несущих плит, первые два приводных ролика находятся в контакте с фрикционным соединением с верхним ходовым рельсом, и вторые два приводных ролика - с нижним ходовым рельсом, первые два приводных ролика и вторые два приводных ролика по отношению к продольному направлению соответствующего ходового рельса расположены на расстоянии друг от друга, причем обе несущие плиты установлены в подшипниках на части шасси с возможностью поворота вокруг оси, пересекающей продольную ось соответствующего ходового рельса посередине между разнесенными приводными роликами, и отжимаются друг от друга посредством эксцентрично относительно этих осей воздействующей распорки с прижатием приводных роликов к соответствующему ходовому рельсу, за счет того, что согласно изобретению каждый из приводных роликов имеет собственный приводной блок в форме редукторного двигателя, редуктор которого выполнен самотормозящим, причем приводной ролик соединен с выходным валом редуктора, на другой стороне несущих плит размещены редукторные двигатели, а редукторы выполнены в виде конических передач, причем на каждой из несущих плит двигатель одного редукторного двигателя расположен рядом с редуктором другого редукторного двигателя, соответственно.
Каждый из четырех приводных роликов смонтирован в подшипниках с возможностью поворота вокруг перпендикулярных к направлению движения осей (А).
Редукторы редукторных двигателей могут быть червячными редукторами с самотормозящими червяками.
Приводные ролики расположены между плечами поворотных вилок и смонтированы в подшипниках на них, причем в опорной части каждой поворотной вилки сидит поворотная цапфа, вставляющаяся в поворотное гнездо на соответствующем носителе.
Подвижный носитель на его первом несущем кронштейне имеет смонтированную в подшипниках на теле оси подшипниковую втулку, посредством которой шарнирно соединен второй несущий кронштейн подвижного носителя.
Каждый приводной ролик установлен без возможности проворачивания на валу, который соединен с выходным валом редукторного двигателя, причем на держателе для вала, как поворотной вилке, соосно с валом жестко закреплен фланец муфты, который привинчен к корпусу редуктора редукторного двигателя.
Ходовые рельсы состоят из труб, и приводные ролики имеют охватывающий их вдоль участка периметра ходовой контур.
Для изобретения существенно, что каждый из приводных роликов имеет собственный приводной блок. Хотя это кажется на первый взгляд дорогостоящим решением, тем не менее, при этом учтено, что присоединенный к каждому отдельному приводному ролику приводной блок стоит существенно меньше, чем общий для всех четырех приводных роликов приводной блок. Отказ от шестерен, цепных звездочек и цепей экономит трудозатраты на монтажные работы и на работы технического обслуживания, которые предъявляют высокие требования к необходимому для этого персоналу. Надежность подъемника, принимая во внимание резервирование всей системы, улучшена значительно. Это основывается, прежде всего, на самотормозящей конструкции редукторов используемых как приводные блоки редукторных двигателей, из которых каждый при нарушении электроснабжения действует для себя одновременно как аварийный тормоз. Таким образом, можно отказаться от дополнительных ловителей. Также набор роликов не должен рассчитываться на случай захвата ловителем, при котором обычно происходит подобное удару механическое воздействие на ролики.
Ниже изобретение разъясняется подробнее на двух примерах выполнения с привлечением чертежей. При этом они показывают:
фиг.1 - лестничный подъемник в схематической перспективной проекции,
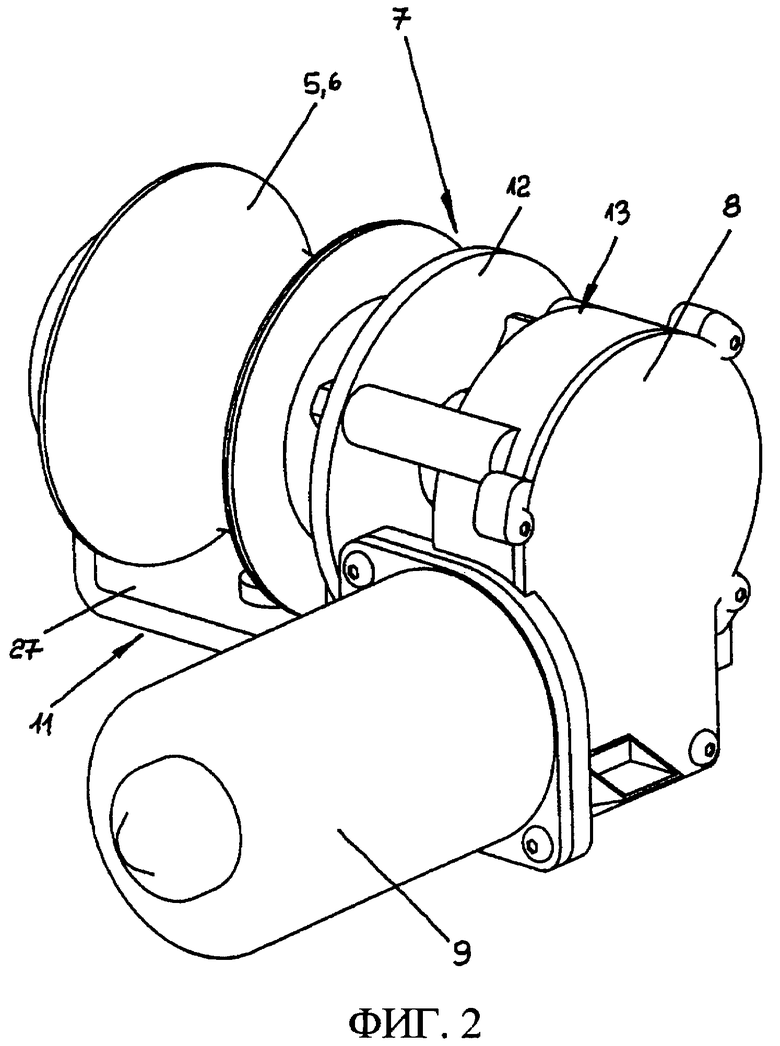
фиг.2 - один из приводных блоков подъемника по фиг.1 в перспективной проекции,
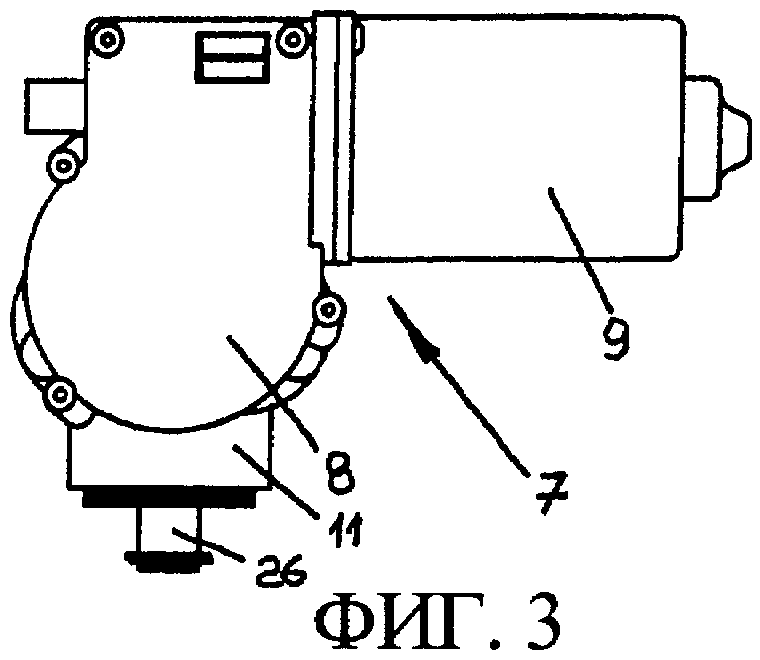
фиг.3 - вид сзади приводного блока по фиг.2 в уменьшенном масштабе,
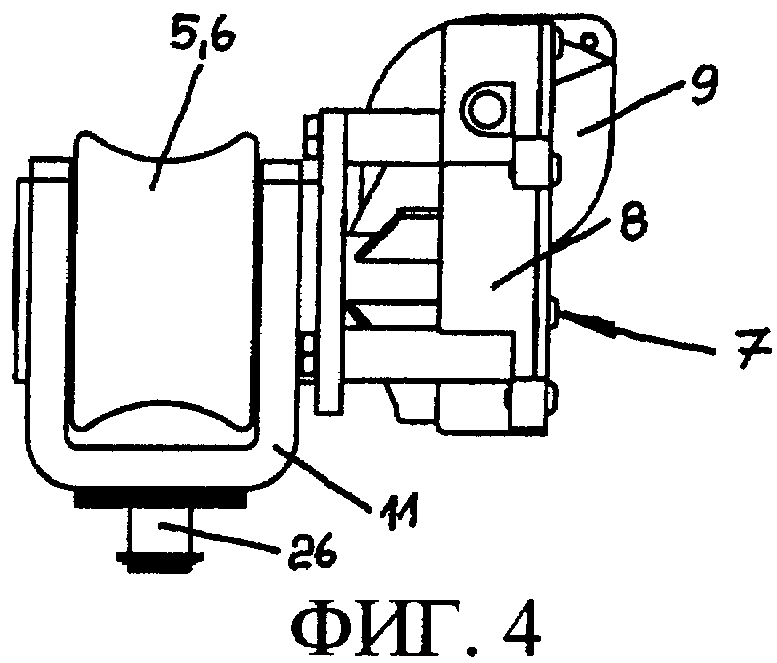
фиг.4 - вид спереди приводного блока по фиг.2 и 3,
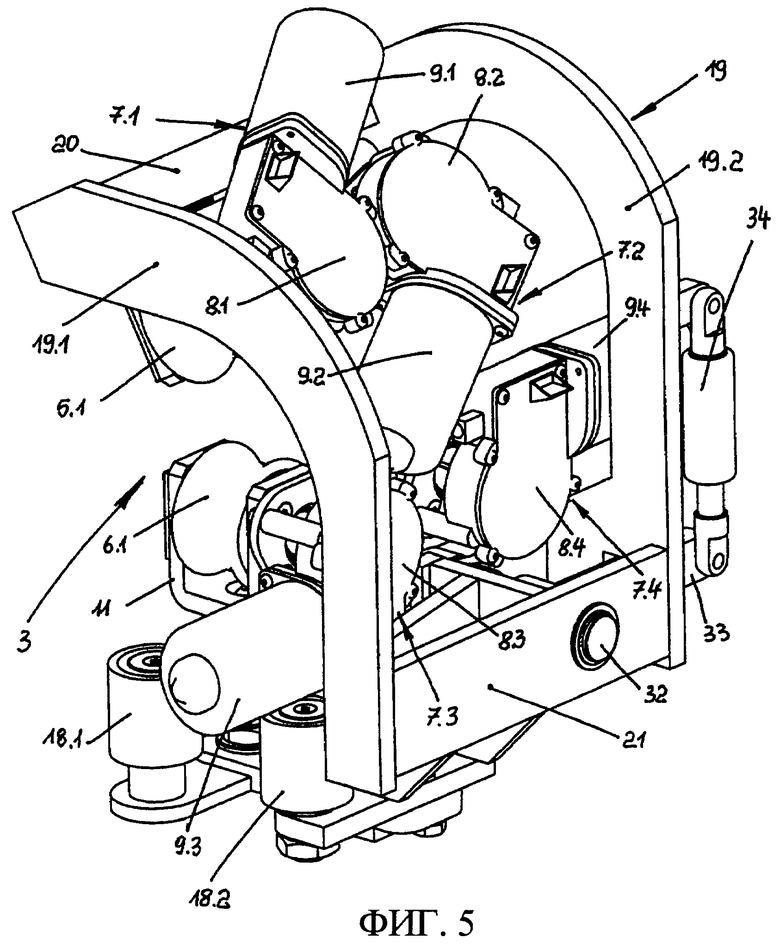
фиг.5 - перспективное представление комплектного шасси лестничного подъемника по фиг.1,
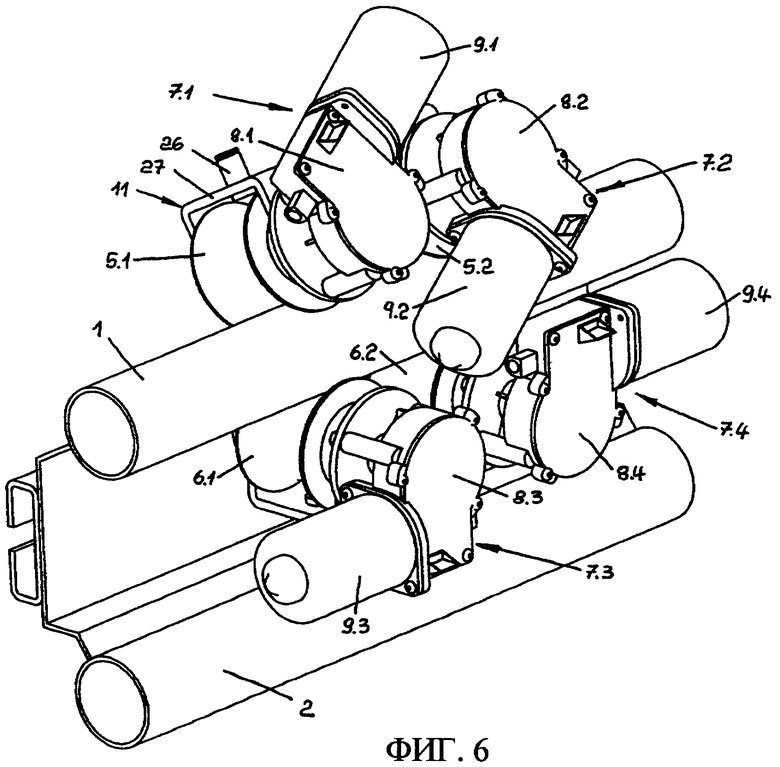
фиг.6 - четыре приводных блока для шасси, согласно фиг.5, в перспективной проекции,
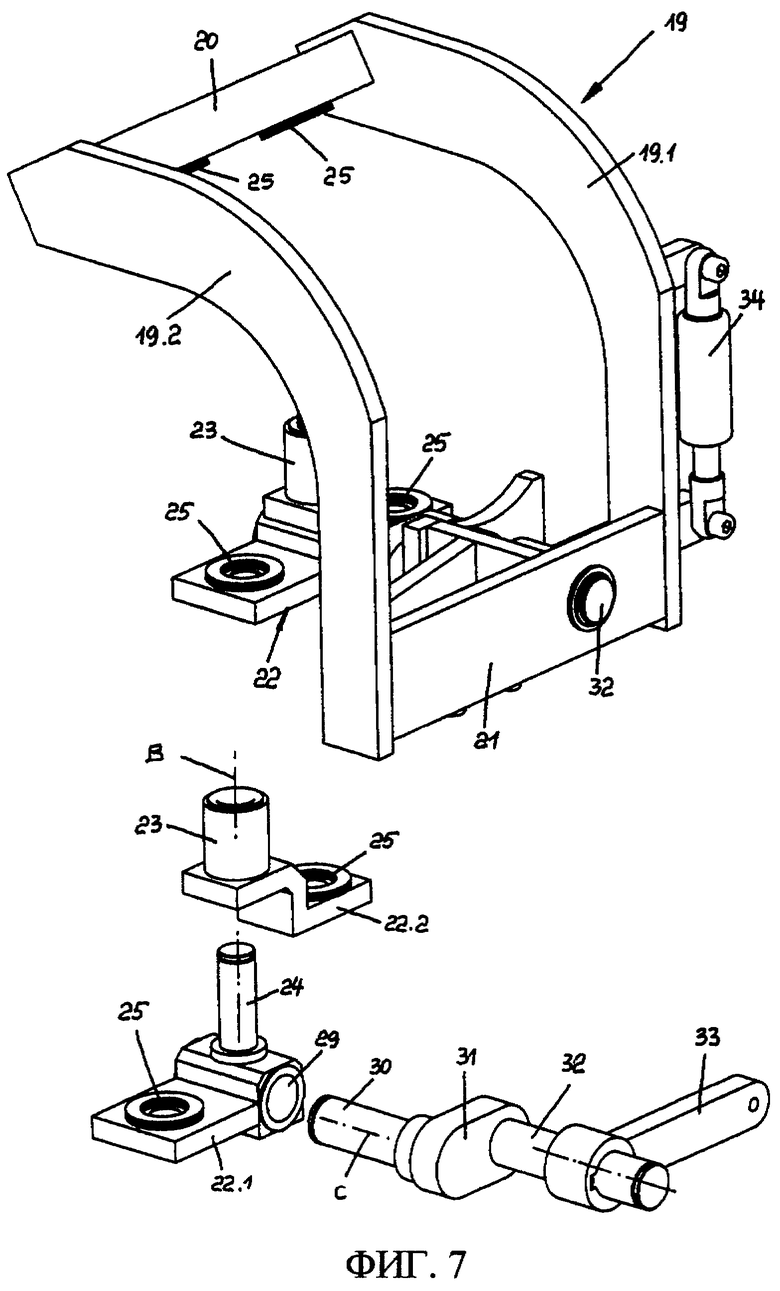
фиг.7 - рама шасси по фиг.5 с предусмотренными на ней гнездами для четырех приводных блоков в перспективном представлении,
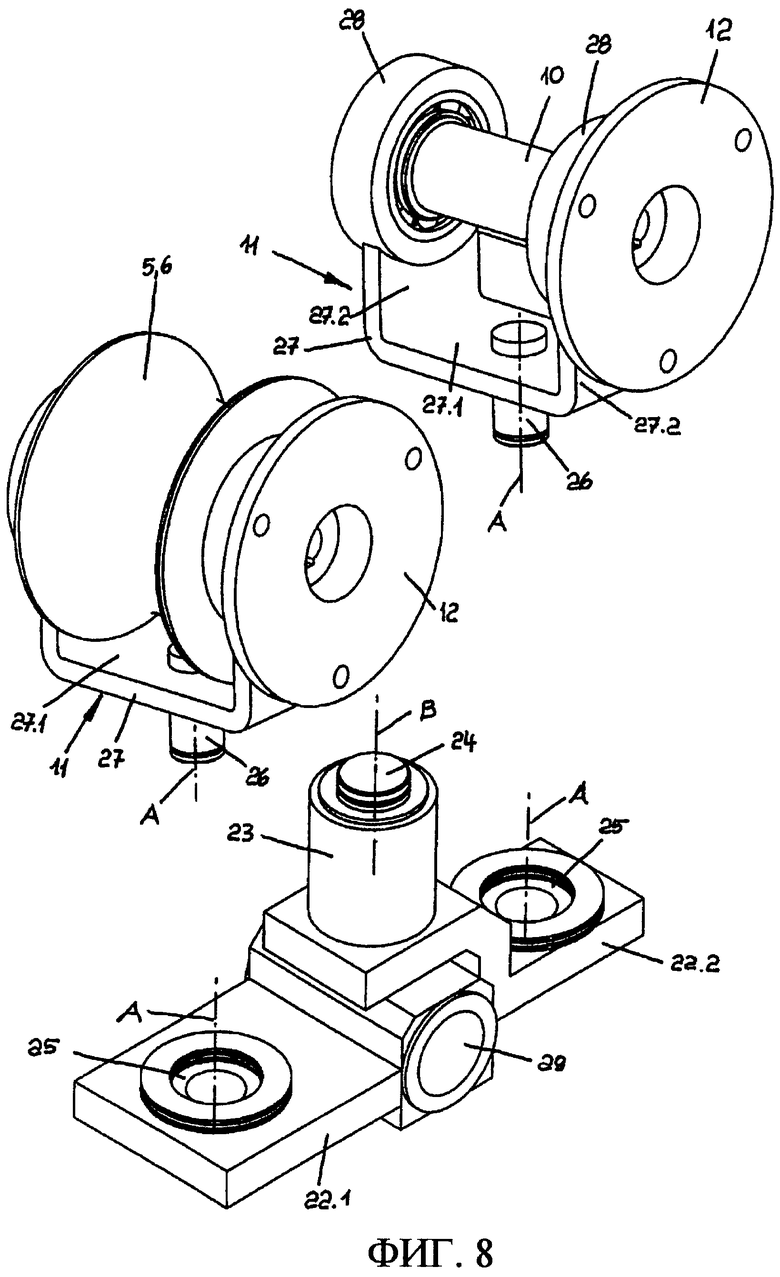
фиг.8 - одно из установочных приспособлений для двух приводных блоков шасси по фиг.5 в перспективном, разобранном представлении,
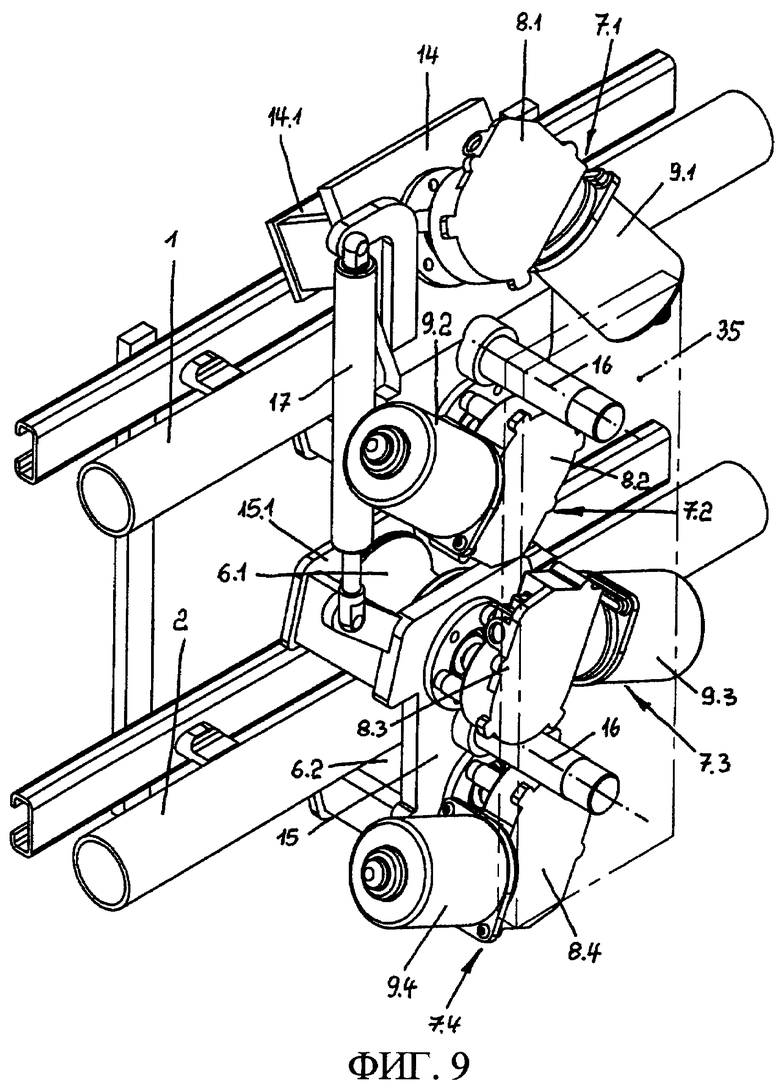
фиг.9 - перспективный вид шасси для лестничных подъемников в ином исполнении,
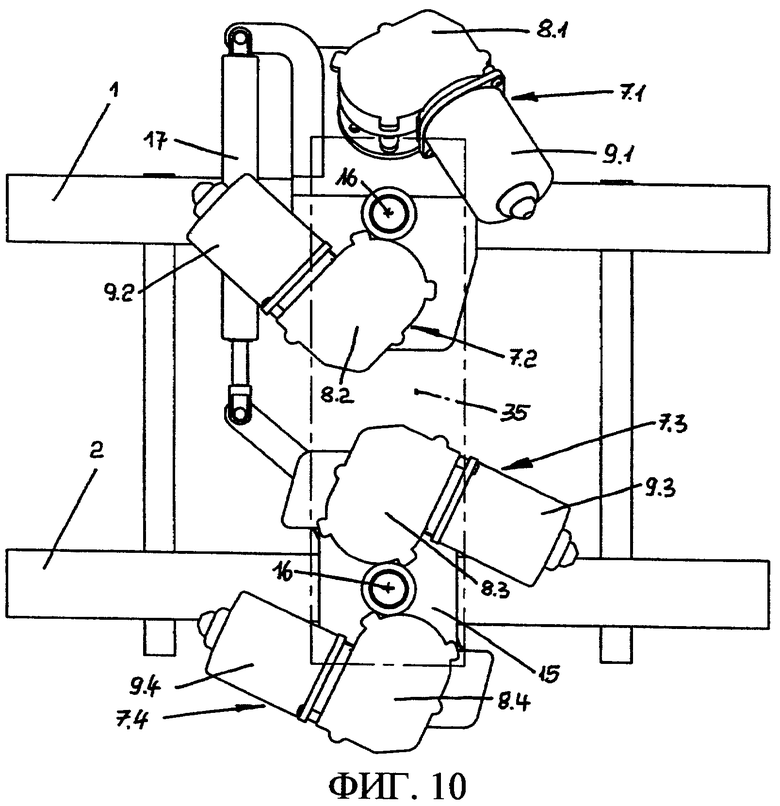
фиг.10 - вид сбоку шасси по фиг.9,
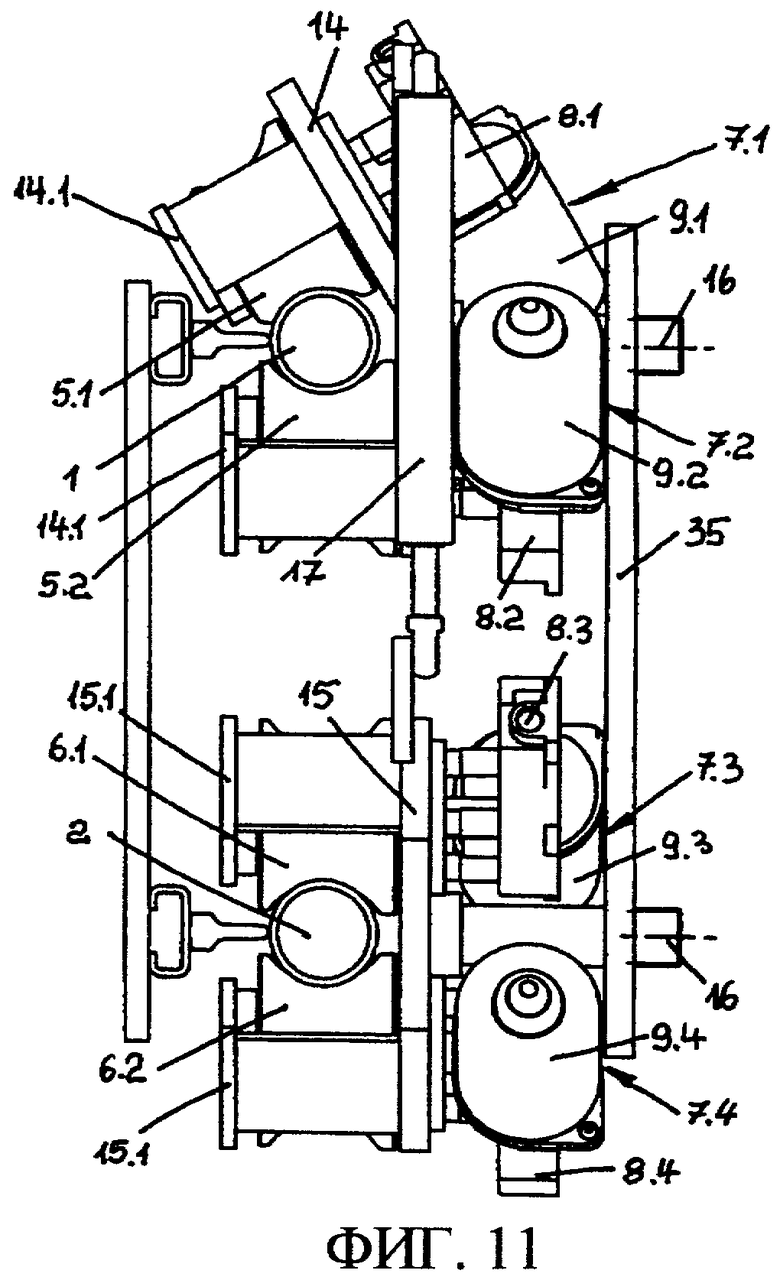
фиг.11 - вид спереди шасси по фиг.9 и 10.
В частности, на фиг.1 наглядно показан путь движения для лестничного подъемника, который состоит из двух расположенных друг над другом ходовых рельсов 1 и 2. В практической конструкции для ходовых рельсов 1, 2 речь идет о трубах, которые имеют круглое поперечное сечение. Вдоль ходовых рельсов может перемещаться шасси 3, которое несет кресло, платформу или прочее транспортное средство 4, которое удерживается в его нормальном положении посредством нивелирующего устройства, независимо от положения наклона ходовых рельсов 1, 2.
Шасси 3 снабжено двумя верхними приводными роликами 5 и двумя нижними приводными роликами 6, причем эти четыре приводных ролика 5, 6 при этом примере изготовления взаимодействуют исключительно с верхним ходовым рельсом 1 и соединены с ним фрикционно, чтобы иметь возможность преобразовывать передаваемые ими приводные усилия в движение перемещения шасси 3. Нижний ходовой рельс 2 служит для стабилизации положения шасси 3. По нему прокатываются опорные ролики 18, которые стабилизируют шасси 3 по отношению к вертикальному направлению.
Фиг.2 показывает один из приводных роликов 5, 6 с соответствующим приводным блоком, который состоит из редукторного двигателя 7. К нему относится электродвигатель 9 с редуктором 8, который прифланцован как коническая передача к электродвигателю 9. Редуктор 8 является самотормозящим редуктором и предпочтительно выполняется как червячный редуктор, причем расположенный обычным способом на валу двигателя червяк, который стоит в зацеплении с ведомым колесом редуктора 8, выполнен самотормозящим.
Редуктор 8 имеет выходной вал, который соединен с представленным на фиг.8 валом 10, на котором без возможности проворачивания установлено соответствующее ведущее колесо 5, 6. Монтаж ведущего колеса 5, 6 на опоры происходит в креплении 11, с которым жестко связан один соосный валу 10 фланец 12 муфты, который свинчен с корпусом 13 редуктора 8 редукторного двигателя 7. В целом приводной ролик 5, 6 и редукторный двигатель 7 представляют собой компактный конструктивный блок, в котором оси приводного ролика 5, 6 и редуктора 8 находятся на одной прямой друг с другом, и к ней под прямым углом проходит ось электродвигателя 9. Это, в частности, поясняют также фиг.3 и 4.
Фиг.5 представляет комплектное шасси 3, которое имеет раму 19 с проходящими в направлении высоты боковыми рамочными частями 19.1 и 19.2. Боковые рамочные части 19.1, 19.2 связаны друг с другом посредством верхнего жесткого рамного носителя 20 и нижней жесткой рамной траверсы 21 в единый жесткий несущий блок. Четыре редукторных двигателя обозначены от 7.1 до 7.4 для лучшего различения друг от друга. В соответствии с этим принадлежащие им редукторы обозначены как 8.1-8.4 и электромоторы - как 9.1-9.4. В дополнение к этому на фиг.6 различимы оба верхних приводных ролика 5.1, 5.2, с которыми соединены редукторные двигатели 7.1 и 7.2. Далее, здесь можно видеть оба нижних приводных ролика 6.1 и 6.2, которые приводятся в действие нижними редукторными двигателями 7.3, 7.4. Четыре приводных ролика 5, 6 находятся во фрикционном соединении исключительно с верхним ходовым рельсом 1.
Необходимое для этого прижимное усилие производится посредством упругого сжатого раскоса 34, который еще будет ниже рассмотрен подробнее.
Как иллюстрирует далее фиг.7, фиксированный в раме 19 носитель 20 служит для поворотно-подвижного приема верхнего редукторного двигателя 7.1 и 7.2, для чего предусмотрены соответствующие поворотные гнезда 25. Далее смонтирован в подшипниках в раме 19, а именно в нижней траверсе 21, поворотно-подвижный носитель 22, который, как показано в нижней части фиг.7, состоит из первого несущего кронштейна 22.1 и второго несущего кронштейна 22.2, из которых второй несущий кронштейн 22.2 поворотно-подвижно смонтирован в подшипниках в первом несущем кронштейне 22.1. На своем внутреннем конце первый несущий кронштейн 22.1 снабжен подшипниковой втулкой 29, на которой сидит проходящая в радиальном направлении поворотная цапфа 24. На поворотной цапфе 24 смонтирован в подшипнике второй несущий кронштейн 22.2 посредством полого цилиндрического подшипникового корпуса 23, и, таким образом, второй несущий кронштейн 22.2 может поворачиваться относительно первого несущего кронштейна 22.1 вокруг оси В, которая совпадает с осью подшипникового корпуса 23 и поворотной цапфы 24.
Подвижно смонтированный в подшипниках на раме 19 носитель 22 имеет в каждом из обоих несущих кронштейнов 22.1, 22.2 поворотные гнезда 25, которые предназначены для нижних приводных роликов 6.1, 6.2. Как следует из фиг.3, 4 и 8, в держателе для приводных роликов 5, 6 сидит поворотная цапфа 26, посредством которой держатели с соответствующими приводными роликами 5, 6 могут базироваться в четырех поворотных гнездах 25 в твердом жестком носителе 20 и в подвижном носителе 22 с возможностью поворота вокруг оси А, которая каждый раз пересекает продольную ось ходового рельса 1 под прямым углом. Таким образом, четыре приводных ролика 5.1, 5.2 и 6.1, 6.2 смонтированы в подшипниках с возможностью поворота по типу роликов рулевой передачи. Дополнительно четвертый приводной ролик 6.4 может поворачиваться еще и вокруг оси В для движения шасси 3 на повороте и чтобы избегать зажимания системы.
Для необходимой адаптации при переходе между участками ходового рельса 1 с различными наклонами предусмотрена поворотная подвижность нижнего носителя 22. Соответствующая ось поворота обозначена С и проходит через расположенную в несущем кронштейне 22.1 подшипниковую втулку 29. С помощью этой подшипниковой втулки 29 носитель 22 насажен на тело 30 оси, которое посредством коленчатого элемента 31 присоединяется к поворотному валу 32. Таким образом, тело 30 оси и вал 32 образуют кривошип, вследствие чего при повороте вала 32 туда и обратно тело 30 оси станет двигаться по круговой траектории вверх и вниз. На поворотном валу 32 без возможности проворачивания закреплен поворотный рычаг 33, с концом которого шарнирно соединен упругий сжатый раскос 34. Сжатый раскос 34 другим концом твердо опирается на раму 19, за счет чего создает на поворотном валу 32 такой крутящий момент, который всегда стремится поднять носитель 22 посредством тела 30 оси. Вследствие этого подвижный носитель 22 и жестко фиксированный в раме 19 носитель 20 будут напряжены друг относительно друга. Это касается, соответственно, расположенных на них приводных роликов 5 и 6.
Фиг.8 иллюстрирует дальнейшие детали носителя 22 и расположенных на нем приводных роликов 6.
Прежде всего, здесь представлены детали держателя 11, которые одинаковы для всех приводных роликов первого варианта выполнения шасси 3. Таким образом, приводные ролики 5, 6 смонтированы в подшипниках на поворотной вилке 27, которая имеет опорную часть 27.1, в которой расположена соответствующая поворотная цапфа 26. Опорная часть 27.1 переходит в параллельные друг другу плечи 27.2 вилки, концы которых несут подшипник 28 для вала 10 соответствующего приводного ролика 5, 6.
Фиг.9-11 показывают шасси иной конструктивной разновидности, у которой приводные блоки, образованные редукторными двигателями 7.1-7.4, для четырех приводных роликов 5, 6 являются, тем не менее, одинаковыми, как при описанном выше шасси 3. Конструктивная модель является иной в том отношении, что оба верхних приводных ролика 5.1, 5.2 фрикционно соединены с верхним ходовым рельсом 1, а оба нижних приводных ролика 6.1, 6.2 находятся во фрикционном соединении с нижним ходовым рельсом 2. Редукторные двигатели 7.1 и 7.2 для верхних приводных роликов 5.1, 5.2 прифланцованы к верхней несущей плите 14, причем соответствующие приводные ролики 5.1, 5.2 расположены на противоположной стороне этой несущей плиты 14, в то время как они смонтированы в подшипниках между несущей плитой 14 и жестко соединенной с ней контрплитой 14.1. Подобным способом прифланцованы редукторные двигатели 7.3 и 7.4 к нижней несущей плите 15, которая имеет контрплиту 15.1, чтобы здесь также иметь возможность принимать приводные ролики 6.1 и 6.2 на противоположной редукторным двигателям 7.3, 7.4 стороне нижней несущей плиты 15.
Прижимание приводных роликов 5, 6 к соответствующему ходовому рельсу 1, 2 происходит здесь посредством того, что несущие плиты 14, 15 смонтированы в подшипниках с возможностью поворота вокруг осей или соответствующих осевых элементов 16 в центральной части 35 шасси, причем обе оси поворота элементов 16 пересекают продольную ось соответствующего ходового рельса 1, 2 по перпендикуляру. В проекции на продольные оси ходовых рельсов 1, 2 верхние приводные ролики 5.1, 5.2 и нижние приводные ролики 6.1, 6.2 имеют равные интервалы относительно точек пересечения осей, соответственно, в повернутых от них различных направлениях. Таким образом, обе несущие плиты 14, 15 могут быть отклонены в таком направлении поворота, что приводные ролики 5, 6 перемещаются в направлении к соответствующему ходовому рельсу 1, 2. Нагрузка на несущие плиты 14, 15 в этом направлении поворота передается посредством упругой нажимной распорки 17, которая воздействует на несущие плиты 14, 15 на расстоянии от обеих осей 16.
Как показывает второй пример изготовления, компактная конструкция приводных блоков, состоящих из редукторных двигателей 7.1-7.4, получается тогда, когда в смежных друг с другом модулях электродвигатель 9, соответственно, одного редукторного двигателя 7 расположен рядом с редуктором 8, соответственно, другого редукторного двигателя 7. Это можно осуществлять при примере изготовления по фиг.9-11 как для верхних, так и для нижних приводных блоков. При первом примере изготовления это расположение возможно только для расположенных поверх ходового рельса 1 редукторных двигателей 7.1 и 7.2, как, прежде всего, иллюстрирует фиг.6.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТИВОВЕС ДЛЯ ВЕРТИКАЛЬНОГО ЛИФТА | 2005 |
|
RU2287475C2 |
| ЭСКАЛАТОР ИЛИ ГРУЗОВОЙ ПОДЪЕМНИК С ПРИВОДОМ | 2007 |
|
RU2464218C2 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| ПОДВЕСНОЙ ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2009 |
|
RU2453490C2 |
| ПРИВОД ВЕРТИКАЛЬНОГО ЛИФТА, РАСПОЛОЖЕННЫЙ НА ЕГО КАБИНЕ | 2005 |
|
RU2308410C2 |
| ДВИЖУЩЕЕСЯ УСТРОЙСТВО С УПРОЩЕННЫМИ ГРУЗОНЕСУЩИМИ ЭЛЕМЕНТАМИ | 2007 |
|
RU2461514C2 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2015 |
|
RU2587118C1 |
| Устройство для управления реверсивным электродвигателем строительного подъемника | 1983 |
|
SU1175848A1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2462408C1 |
Изобретение относится к подъемно-транспортному оборудованию и касается конструкции лестничного подъемника. Подъемник имеет верхний ходовой рельс, нижний ходовой рельс и направляемое по ним шасси, на котором имеются в наличии четыре связанных с приводным блоком приводных ролика. В вариантах выполнения подъемника каждый из приводных роликов имеет собственный приводной блок в форме редукторного двигателя, редуктор которого выполнен самотормозящим, причем приводной ролик соединен с выходным валом редуктора. Согласно первому варианту выполнения подъемника шасси имеет раму с жестко укрепленным на ней носителем и подвижным на ней другим носителем. На носителях в направлении движения последовательно расположены по два приводных ролика с их редукторными двигателями. Подвижный носитель может поворачиваться вокруг оси, перпендикулярной к направлению движения, а также расположен с изменяемым интервалом по отношению к жестко установленному носителю и нагружен в направлении к ходовому рельсу прижимной силой посредством упруго сжатого раскоса. Согласно второму варианту выполнения подъемника приводные ролики и редукторные двигатели расположены с противоположных сторон несущих плит. Редукторы выполнены в виде конических передач, причем на каждой из несущих плит двигатель одного редукторного двигателя расположен рядом с редуктором другого редукторного двигателя. Изобретения позволяют упростить конструкцию и одновременно повысить надежность. 2 н. и 5 з.п. ф-лы, 11 ил.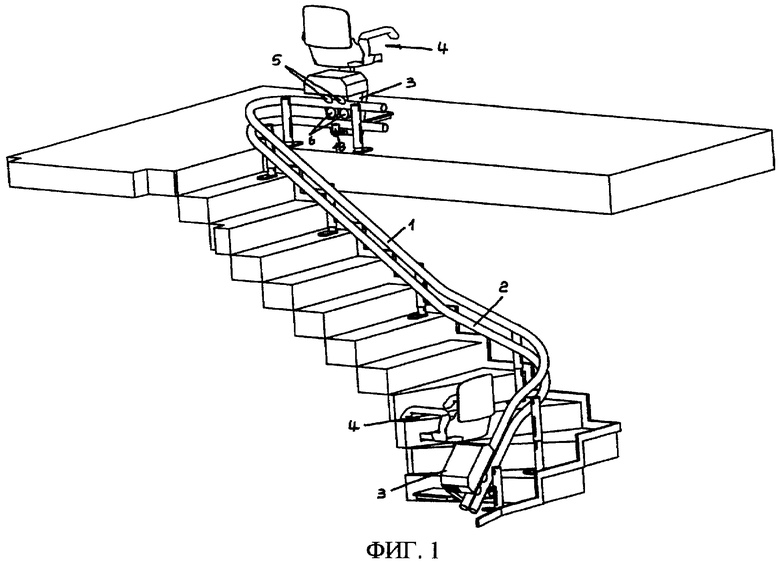
| DE 9211115 U1, 12.11.1992 | |||
| US 5908087 A, 01.06.1999 | |||
| DE 10106187 A1, 14.08.2002 | |||
| Способ измерения параметра электропроводящего слоя | 1984 |
|
SU1206682A1 |
| WO 9929551 A1, 17.06.1999 | |||
| Наклонный подъемник | 1977 |
|
SU626000A1 |
| Преобразователь перемещение-код | 1974 |
|
SU525141A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

