Настоящее техническое решение относится к газопроводному транспорту и может быть использовано при эксплуатации и контроле технического состояния магистральных газопроводов.
Известен авиационный лазерный газоанализатор [1] для обнаружения утечек из трубопроводов, состоящий из лазера, оптически сопряженного с фотоприемным устройством, которое подключено к усилителю-преобразователю, соединенному с блоком памяти и вычислителем (компьютером), выход которого связан с сигнальным устройством (устройством тревожной сигнализации).
Известный авиационный (пилотируемый) лазерный газоанализатор в состоянии контролировать газовые трубопроводы большой протяженности, однако его использование (например, в вертолетном варианте) очень дорого. Кроме того, погодные условия (боковой ветер, ухудшение метеорологической видимости и пр.) осложняют полет летательного аппарата над трассой трубопровода (результирующая траектория представляет собой случайной формы кривую), что создает большие ошибки при определении места аварии (разрыва трубопровода). Применение данного авиационного лазерного газоанализатора возможно только при больших утечках газа в трубопроводах высокого давления и требует использования лазерных устройств большой мощности.
Известен также автоматический беспилотный диагностический комплекс [2], содержащий систему диагностики состояния магистральных трубопроводов, вычислитель (компьютер) действительных координат, обзорную телевизионную систему, наземный пункт управления (диспетчерский центр) с устройствами связи и контроля.
Данный автоматический беспилотный диагностический комплекс также подвержен климатическим факторам, может использоваться только при больших утечках газа и разрушениях покрытий в трубе площадью от 1 м и более. Кроме того, вследствие некорректного планирования траектории управляемого полета беспилотный аппарат может выходить за пределы зоны радиодоступа (покрытия) передатчика пульта дистанционного управления, что приводит к потере управления и падению беспилотного аппарата в неизвестной точке местности. С учетом того, что стоимость автоматического беспилотного диагностического комплекса может составлять несколько сотен тысяч рублей, данный фактор нельзя не учитывать в ходе организации его применения.
Известно устройство [3] для обнаружения под снеговым покровом утечек углеводородов из магистральных трубопроводов, включающее транспортное средство для объезда трассы трубопровода с установленным на нем детектором для обнаружения в окружающем воздухе присутствия углеводородов.
Данное устройство предназначено для работы только в зимнее время и реализовано на транспортном средстве в виде гусеничного вездехода с обязательным присутствием водителя (оператора).
Наиболее близкой к предлагаемой системе контроля утечки газа из магистрального газопровода является система [4] для контроля утечки газа из магистрального газопровода, содержащая лазерное устройство, с частотой, совпадающей со спектром поглощения транспортируемого по газопроводу газа, оптически согласованное с фотоприемным устройством, выход которого подключен к входу усилителя (усилителя-преобразователя), индикатор (устройство тревожной сигнализации) и радиомодем (приемно-передающее устройство), выход которого (по радиоканалу) связан с рабочей станцией центра мониторинга (стационарным диспетчерским центром).
Недостатком этой системы для контроля утечки газа из магистрального газопровода является невозможность контроля утечки газа по трассе проложения газопровода, что ограничивает ее применение локальными участками газопроводов и, в частности, местами их пересечения с авто- и железными дорогами.
Целью изобретения является обеспечение возможности контроля утечки газа из магистрального газопровода по трассе его проложения в автоматическом режиме без участия человека-оператора, в любое время года и суток, в любых метеоусловиях с высокой точностью.
Для достижения поставленной цели в систему для контроля утечки газа из магистрального газопровода, содержащую лазерное устройство, с частотой, совпадающей со спектром поглощения транспортируемого по газопроводу газа, оптически согласованное с фотоприемным устройством, выход которого подключен к входу усилителя-преобразователя, устройство тревожной сигнализации и первое приемно-передающее устройство, выход которого по радиоканалу связан со стационарным диспетчерским центром, введены транспортное средство с установленными на нем компьютером, к которому подключены первое приемно-передающее устройство, выход усилителя-преобразователя и вход устройства тревожной сигнализации, а транспортное средство, кроме того, содержит несколько видеокамер, подключенных к компьютеру через мультиплексор, часть из которых с перекрывающимися секторами обзора образует систему кругового видеонаблюдения, две видеокамеры, расположенные под определенным углом относительно друг друга, составляют систему стереонаблюдения и второе приемно-передающее устройство транспортного средства, обеспечивающее связь по отдельному радиоканалу с тремя стационарными приемно-передающими устройствами, при этом выход второго приемно-передающего устройства транспортного средства подключен к входу преобразователя интервалов времени в цифровой код, управляющий вход которого соединен с управляющим входом второго приемно-передающего устройства транспортного средства и компьютером транспортного средства, соединенного с выходом преобразователя интервалов времени в цифровой код.
Стационарный диспетчерский центр, в свою очередь, содержит приемно-передающее устройство диспетчерского центра, подключенное к компьютеру диспетчерского центра с соответствующим монитором.
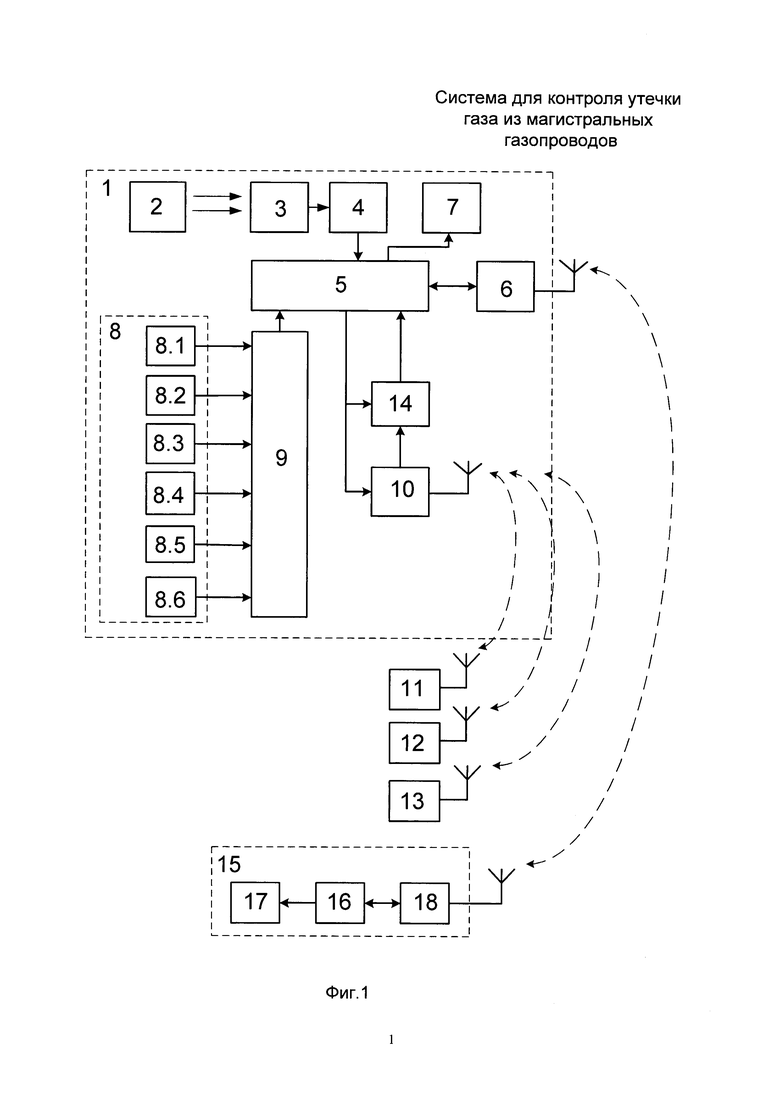
Сущность полезной модели поясняется на чертежах (фиг. 1, фиг. 2 и фиг. 3), где на фиг. 1 приведена структурная схема системы, на фиг. 2 принцип ее работы, а на фиг. 3 внешний вид оборудованного транспортного средства.
На транспортном средстве 1 (фиг. 1, фиг. 3) установлено лазерное устройство 2 с частотой, совпадающей со спектром поглощения транспортируемого по газопроводу газа, оптически согласованное с фотоприемным устройством 3, соединенным с усилителем-преобразователем 4, выход которого подключен к компьютеру 5 транспортного средства, к которому подключено первое приемно-передающее устройство 6 транспортного средства с антенной (расположенной в корпусе штанги транспортного средства) и устройство 7 тревожной сигнализации (сирена и проблесковый фонарь). К компьютеру 5 также подключены видеокамеры 8 через мультиплексор 9, из числа которых, например, четыре (8.1-8.4), установленные на штанге транспортного средства 1, образуют систему кругового видеонаблюдения, а две видеокамеры (8.5, 8.6, устанавливаемые в передней части транспортного средства) образуют систему стереонаблюдения, для фиксации инородных предметов, мешающих передвижению транспортного средства по заданному маршруту.
На транспортном средстве также установлено второе приемно-передающее устройство 10 с антенной, обеспечивающее связь по отдельному радиоканалу со стационарными приемно-передающими устройствами 11, 12, 13. Выход второго приемно-передающего устройства 10 транспортного средства подключен к входу преобразователя 14 интервалов времени в цифровой код, управляющий вход которого соединен с управляющим входом второго приемно-передающего устройства 10 транспортного средства и компьютером 5 транспортного средства, соединенного с выходом преобразователя 14 интервалов времени в код.
Примечания
1. В качестве транспортного средства 1 может быть использован мобильный робот [5].
2. В качестве лазерного устройства 2, оптически согласованного с фотоприемным устройством 3, может быть использован оптический индикатор метана OMD™ [6] фирмы АО «Пергам-Инжиниринг».
3. В качестве второго приемно-передающего устройства 10 и преобразователя 14 интервалов времени в цифровой код может быть использован единый модуль (радиочип) DW1000 ScenSor компании Deca Wave.
На стационарном диспетчерском центре 15 находится компьютер 16 диспетчерского центра, к которому подключен монитор 17 наблюдения и приемно-передающее устройство 18 диспетчерского центра с антенной, обеспечивающее связь с первым приемно-передающим устройством 6 транспортного средства.
Перед практическим применением системы проводят подготовку контролируемого участка газопровода (см. фиг. 2) и программирование транспортного средства (ТС) для его автономного движения по заданному маршруту. С этой целью по периметру контролируемого участка трассы газопровода устанавливают не менее трех стационарных приемно-передающих устройств (ППУ1 - ППУ3) и с помощью геодезических приборов определяют их точное местоположение на местности в координатах (X1, Y1), (X2, Y2), (X3, Y3). Далее на подробной карте-схеме контролируемого участка газопровода, представленной на мониторе 17 стационарного диспетчерского центра (ДЦ) 15, с обозначенными на ней дополнительными ППУ, прокладывают траекторию движения транспортного средства от начальной точки контроля газопровода (точки А) до конечной точки контроля (точки В).
Далее оператор с компьютера 16 диспетчерского центра 15 через приемно-передающие устройства 18 и 6 заносит в память компьютера 5 транспортного средства информацию о его маршруте движения в координатах (Xi, Yi) через заданные расстояния. В процессе движения транспортного средства по заданному маршруту приемно-передающее устройство 10 по команде с компьютера 5 периодически посылает радиосигналы на стационарные ППУ1 - ППУ3, которые переизлучают их обратно к приемно-передающему устройству 10. Интервалы времени (ti) между моментами передачи радиосигналов приемно-передающим устройством 10 и их обратным приемом преобразуются преобразователем 14 в цифровой код, который пересчитывается компьютерами 5 в расстояния (ri) по известной формуле:

где С - скорость распространения радиоволн.
Учитывая, что между текущими координатами Xi, Yi транспортного средства на местности и измеренными расстояниями r1i, r2i, r3i до дополнительных ППУ1 - ППУ3, при известных координатах ППУ, существует прямая зависимость, то контролируя расстояния r1i, r2i, r3i компьютер 5 транспортного средства автоматически контролирует (и при необходимости корректирует) траекторию движения транспортного средства по заданному маршруту.
В процессе движения транспортного средства по заданной траектории (вдоль газопровода) фотоприемное устройство 3 с помощью лазерного устройства 2 фиксирует утечку газа (метана) из газопровода. Усилитель-преобразователь 4 формирует цифровой сигнал на компьютер 5, который дает команду на устройство 7 тревожной сигнализации для включения сирены и проблескового фонаря, а также посредством приемно-передающего устройства 6 транспортного средства передает на диспетчерский центр 15 видеосигнал для отображения на мониторе 17 возникшей аварийной ситуации и принятия решения.
Дополнительно видеокамеры 8.1-8.4 кругового видеонаблюдения (каждая в своем секторе) передают на диспетчерский центр 15 видеосигнал для отображения на мониторе 17 окружающей транспортное средство обстановки с целью контроля его движения по маршруту.
В случае появления на пути следования транспортного средства посторонних непреодолимых предметов они последовательно обнаруживаются стереокамерами 8.5, 8.6. Транспортное средство обходит препятствие и, ориентируясь по ранее записанным в памяти компьютера 5 координатам, вновь выходит на заданную траекторию движения.
Литература
1. Патент RU 2086959 на изобретение (аналог). Авиационный лазерный газоанализатор для обнаружения утечек из трубопроводов. Опубликовано 10.08.1997 г.
2. Патент RU 2200900 на изобретение (аналог). Автоматический беспилотный диагностический комплекс. Опубликовано 20.03.2003 г.
3. Патент RU 2066019 на изобретение (аналог). Устройство для обнаружения под снеговым покровом утечек углеводородов из магистральных трубопроводов. Опубликовано 27.08.1996 г.
4. Патент RU 2315230 на изобретение (прототип). Система для контроля утечки газа из магистрального газопровода. Опубликовано 20.01.2008 г.
5. Патент RU 92020 на промышленный образец. Мобильный робот. Опубликовано 16.03.2015 г.
6. Оптический индикатор метана OMD™ ./omd_metan.pdf.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ С ТРАНСПОРТНОГО СРЕДСТВА, НАХОДЯЩЕГОСЯ В ДВИЖЕНИИ | 2015 |
|
RU2678688C2 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ С ТРАНСПОРТНОГО СРЕДСТВА, НАХОДЯЩЕГОСЯ В ДВИЖЕНИИ | 2015 |
|
RU2626251C2 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ УНИЧТОЖЕНИЯ КОМАРОВ | 2016 |
|
RU2670123C2 |
| СИСТЕМА РАЗДЕЛЬНОГО СБОРА И ТРАНСПОРТИРОВКИ МУСОРА | 2014 |
|
RU2638531C2 |
| РОБОТ-СНЕГОУБОРЩИК | 2015 |
|
RU2636402C2 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ УТЕЧКИ ГАЗА ИЗ МАГИСТРАЛЬНОГО ГАЗОПРОВОДА | 2006 |
|
RU2315230C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ОБЪЕКТОВ | 2014 |
|
RU2585991C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КОНТРОЛЯ УТЕЧКИ ГАЗА | 2017 |
|
RU2666324C2 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ ЗА ОПАСНЫМ УЧАСТКОМ МАГИСТРАЛЬНОГО ГАЗОПРОВОДА | 2007 |
|
RU2334163C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ ШКОЛЬНОГО АВТОБУСА | 2008 |
|
RU2364942C1 |


Система для контроля утечки газа из магистрального газопровода может быть использована при эксплуатации и контроле технического состояния магистральных трубопроводов. В системе для контроля утечки газа контроль утечки осуществляется с транспортного средства, двигающегося по трассе газопровода. На транспортном средстве (ТС) установлено лазерное устройство с частотой, совпадающей со спектром поглощения транспортируемого по газопроводу газа, оптически согласованное с фотоприемным устройством, соединенным с усилителем-преобразователем, выход которого подключен к компьютеру ТС, к которому подключено первое приемно-передающее устройство (ППУ), посредством которого реализуется радиосвязь с ППУ, компьютером и монитором диспетчерского центра (ДЦ). На ТС установлены и подключены к компьютеру устройство тревожной сигнализации, видеокамеры через мультиплексор, из которых четыре образуют систему кругового обзора, а две - стереонаблюдение. На ТС установлено также второе ППУ, управляемое компьютером, осуществляющее радиосвязь по отдельному радиоканалу с тремя стационарными ППУ, расположенными по периметру контролируемого участка трассы газопровода, для определения текущих координат ТС. Выход ППУ соединен с преобразователем интервалов времени в цифровой код, который поступает в компьютер для его пересчета в текущее расстояние между ТС и тремя стационарными ППУ. Технический результат – возможность обеспечения контроля утечки газа из газопровода по трассе его проложения в автоматическом режиме без участия человека-оператора, в любое время года и суток, в любых метеоусловиях с высокой точностью. 1 з.п. ф-лы, 3 ил.
1. Система для контроля утечки газа из магистрального газопровода, содержащая лазерное устройство с частотой, совпадающей со спектром поглощения транспортируемого по газопроводу газа, оптически согласованное с фотоприемным устройством, выход которого подключен к входу усилителя-преобразователя, устройство тревожной сигнализации и первое приемно-передающее устройство, выход которого по радиоканалу связан со стационарным диспетчерским центром, отличающаяся тем, что введены транспортное средство с установленным на нем компьютером, к которому подключены первое приемно-передающее устройство, выход усилителя-преобразователя и вход устройства тревожной сигнализации, а транспортное средство, кроме того, содержит несколько видеокамер, подключенных к компьютеру через мультиплексор, часть из которых с перекрывающимися секторами обзора образует систему кругового видеонаблюдения, две видеокамеры, расположенные под определенным углом относительно друг друга, составляют систему стереонаблюдения и второе приемно-передающее устройство транспортного средства, обеспечивающее связь по отдельному радиоканалу с тремя стационарными приемно-передающими устройствами, при этом выход второго приемно-передающего устройства транспортного средства подключен к входу преобразователя интервалов времени в цифровой код, управляющий вход которого соединен с управляющим входом второго приемно-передающего устройства транспортного средства и компьютером транспортного средства, соединенного с выходом преобразователя интервалов времени в цифровой код.
2. Система для контроля утечки газа из магистрального газопровода по п. 1, отличающаяся тем, что стационарный диспетчерский центр содержит приемно-передающее устройство диспетчерского центра, подключенное к компьютеру диспетчерского центра с соответствующим монитором.
| CN 201118829 Y, 17.09.2008 | |||
| CN 104948915 A, 30.09.2015 | |||
| ТРЕХФАЗНАЯ ДВУХСЛОЙНАЯ ЭЛЕКТРОМАШИННАЯ ОБМОТКА ПРИ 2p=10, z=96 (q=16/5) | 2004 |
|
RU2270514C2 |
| CN 101561081 B, 22.08.2012. | |||

