Настоящее техническое решение относится к снегоуборочной технике и может быть использовано для уборки снега с улиц, площадей населенных пунктов и городов, с пешеходных дорожек и тротуаров.
Известна снегоуборочная машина [1], содержащая снегоочиститель, установленный впереди машины с возможностью подъема в вертикальной плоскости, и поворотный круг с возможностью поворота в плане.
Недостатками известной снегоуборочной машины являются:
- громоздкость и металлоемкость конструкции, что ограничивает ее применение на малых площадках;
- обязательное присутствие водителя снегоуборочной машины при выполнении работ по уборке снега.
Известна система беспроводного управления снегоочистителем [2], содержащая транспортное средство и блок управления транспортным средством, состоящий из компьютера, блока памяти и приемопередатчика:
Недостатком данной системы является отсутствие возможности автономного использования снегоочистителя без оператора.
Наиболее близким к заявляемому роботу-снегоуборщику является робот-снегоуборщик [3] на основе самоходной колесной машины, содержащий блок управления, включающий в свой состав компьютер (центральный процессор), запоминающее устройство и приемно-передающее устройство, а также связанные с компьютером блок управления, датчик близости и устройство тревожной сигнализации.
Недостатками данного робота-снегоуборщика являются:
- отсутствие возможности объезда препятствия при его обнаружении датчиком близости, то есть при наличии препятствия известный робот-снегоочиститель просто останавливается и прекращает работу;
- для определения местоположения и ориентации робота-снегоуборщика используется спутниковая навигация, реализованная в виде отдельного блока (LOI), содержащего GPS-датчик, компас и акселерометр. Однако спутниковой навигации присущи характерные недостатки. Самым явным недостатком использования любой такой системы является то, что до приемника при определенных условиях сигнал может и не доходить либо приходить, но со значительными задержками или искажениями. Большая облачность, характерная для снегопада, также может ухудшать прием сигнала со спутников. Сигнал GPS могут также исказить помехи, возникающие в результате магнитных бурь, или помехи от наземных источников радиосигнала. Все это влияет на точность движения робота-снегоуборщика, а также на надежность и качество его работы.
Целью изобретения являются улучшение маневренности и обеспечение работы робота-снегоуборщика круглые сутки при любых метеоусловиях и других мешающих факторах.
Для достижения поставленной цели в робот-снегоуборщик, состоящий из самоходной колесной машины, содержащий блок управления, включающий в свой состав компьютер с внутренней памятью, к которому подключены датчик близости, устройство тревожной сигнализации и приемно-передающее устройство, введены три базовых приемно-передающих устройства, расположенные по периметру обрабатываемого участка, обеспечивающие связь по соответствующим радиоканалам с приемно-передающим устройством блока управления, а в блок управления введен подключенный к компьютеру датчик пройденного пути.
Сущность изобретения поясняется чертежами:
- (фиг. 1) - общий вид робота-снегоуборщика сбоку;
- (фиг. 2) - общий вид робота-снегоуборщика сзади с поднятым ковшом;
- (фиг. 3) - общий вид робота-снегоуборщика спереди;
- (фиг. 4) - структурная схема блока управления;
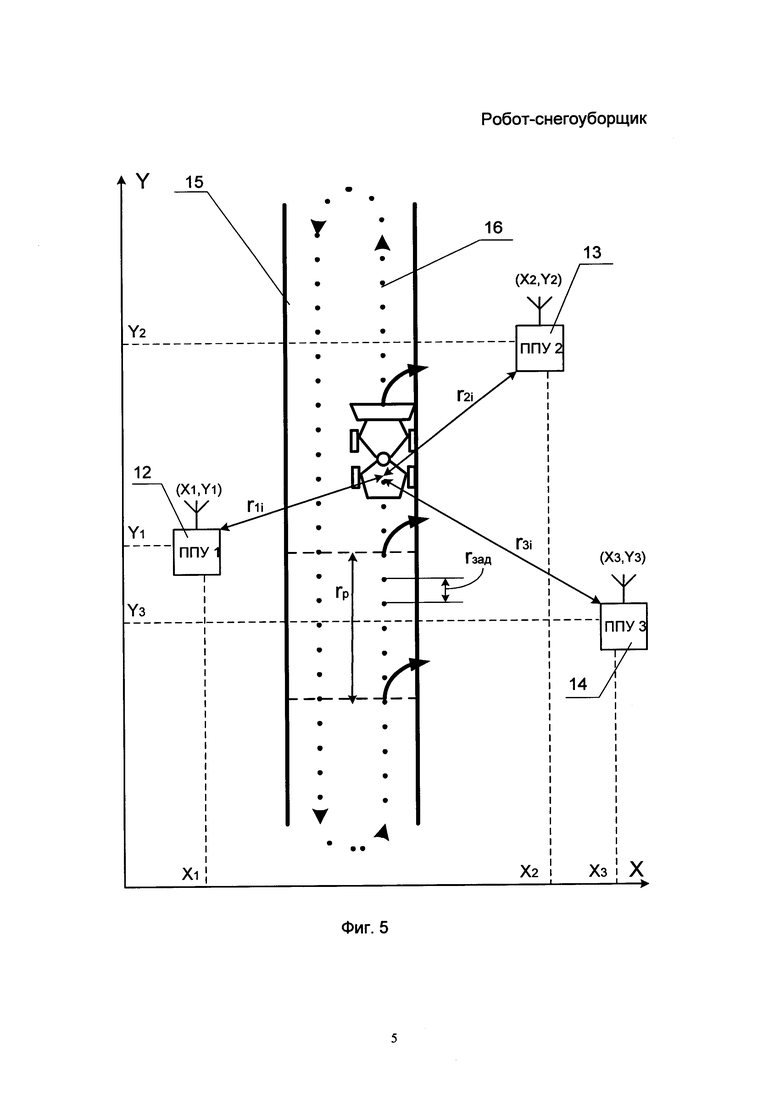
- (фиг. 5) - принцип работы робота-снегоуборщика и координации его движения.
Робот-снегоуборщик состоит из самоходной колесной машины 1, выполненной с применением принципа «ломающейся» рамы и фронтально расположенным ковшом 2 (фиг. 1). Подъем ковша осуществляется приводом подъема 3 (выполненного, например, на основе линейного серводвигателя) посредством шарнирно соединенных между собой параллельных тяг 4, а зачерпывание (опрокидывание) осуществляется приводом зачерпывания 5 (фиг. 2). Управление ковшом 2 и движением самоходной колесной машины 1 осуществляется от блока управления 6 (фиг. 3 и 4), который включает в свой состав компьютер 7, к которому подключены датчик 8 пройденного пути (одометр), датчик близости (ультразвуковой локационный датчик 9, позволяющий определять препятствия, в том числе внутри снежного покрова), устройство 10 тревожной сигнализации (сирена и проблесковый фонарь, установленные на корпусе колесной машины 1) и приемно-передающее устройство 11.
Для координации движения робота-снегоуборщика по заданному маршруту на местности в районе его работы устанавливают не менее трех базовых приемно-передающих устройств 12, 13, 14 (фиг. 4 и 5), обеспечивающих связь по соответствующим радиоканалам с блоком управления 6.
Перед практическим применением робота-снегоуборщика проводят подготовку убираемой территории (пешеходной дорожки или тротуара) 15 (фиг. 5) и «обучение» робота-снегоуборщика движению по заданному маршруту 16 уборки. С этой целью по периметру убираемой территории в пределах радиовидимости устанавливают базовые приемно-передающие устройства 12 (ППУ1), 13 (ППУ2), 14 (ППУ3) (фиг. 5) и, с помощью геодезических приборов или спутниковых навигационных систем (GPS, ГЛОНАСС), определяют их точное местоположение на местности в координатах (X1, Y1), (Х2, Y2), (Х3, Y3). Указанные координаты фиксируют на карте-схеме убираемой территории, отображаемой в соответствующем масштабе на мониторе вспомогательного компьютера (не показан). На этой же карте-схеме прокладывают траекторию движения робота-снегоуборщика по заданному маршруту 16.
Далее оператор из вспомогательного компьютера заносит в память компьютера 7 блока управления 6 робота-снегоуборщика информацию о его маршруте движения в координатах (Xi, Yi) через заданные расстояния rзад.
В процессе движения робота-снегоуборщика по заданному маршруту его приемно-передающее устройство 11 (фиг. 4) по команде с компьютера 7 периодически посылает радиосигналы на базовые приемно-передающие устройства ППУ1-ППУ3, которые переизлучают их обратно к приемно-передающему устройству 11 робота-снегоуборщика. Интервалы времени (t1i, t2i, t3i) между моментами передачи радиосигналов приемно-передающим устройством 11 и их обратным приемом пересчитываются компьютером 7 робота-снегоуборщика в расстояния (r1i, r2i, r3i) по известной формуле:
ri=C⋅ti,
где С - скорость распространения радиоволн.
Учитывая, что между текущими координатами (Xi, Yi) робота-снегоуборщика на местности и измеренными расстояниями (r1i, r2i, r3i) до базовых приемно-передающих устройств ППУ1-ППУ3, при известных координатах ППУ, существует прямая зависимость, то, контролируя расстояния (r1i, r2i, r3i), компьютер 7 робота-снегоуборщика автоматически контролирует (и при необходимости корректирует) траекторию движения робота-снегоуборщика по заданному маршруту.
В процессе движения робота-снегоуборщика по заданному маршруту и заполнения его ковша 2 снегом робот разворачивается и выгружает снег из ковша 2 на обочину. Расстояние (rp), проходимое роботом-снегоуборщиком между очередными разгрузками, задается оператором перед началом работы в память компьютера 7 робота-снегоуборщика по формуле:
rp=N⋅rзад,
где N - число, выбираемое оператором в зависимости от интенсивности ожидаемых осадков.
В случае появления на пути следования робота-снегоуборщика посторонних непреодолимых предметов они обнаруживаются ультразвуковым локационным датчиком 9 блока управления 6 и идентифицируются как непреодолимые. Робот-снегоуборщик обходит препятствие и, ориентируясь по ранее записанным в памяти компьютера 7 координатам, вновь выходит на заданную траекторию движения.
При невозможности дальнейшего движения робота-снегоуборщика по заданному маршруту компьютер 7 блока управления 6 формирует сигнал в устройство 10 тревожной сигнализации для включения сирены и проблескового фонаря с целью привлечения внимания дежурного оператора.
Литература
1 Патент RU 2143027 С1, МПК Е01Н 5/09 (аналог). Снегоуборочная машина. Опубликовано 20.12.1999.
2 Патент SU 20140052335 А1, МПК Е01Н 5/06 (аналог). Система беспроводного управления снегоочистителем. Опубликовано 20.02.2014.
3 Патент SU 20140180478 А1, МПК B25J 9/16 (прототип). Робот-снегоуборщик. Опубликовано 26.06.2014.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ КОНТРОЛЯ УТЕЧКИ ГАЗА ИЗ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ | 2016 |
|
RU2638136C1 |
| АВТОНОМНАЯ МОБИЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА ДЛЯ ОЧИСТКИ СНЕГА | 2019 |
|
RU2730666C1 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ С ТРАНСПОРТНОГО СРЕДСТВА, НАХОДЯЩЕГОСЯ В ДВИЖЕНИИ | 2015 |
|
RU2678688C2 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ С ТРАНСПОРТНОГО СРЕДСТВА, НАХОДЯЩЕГОСЯ В ДВИЖЕНИИ | 2015 |
|
RU2626251C2 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| СИСТЕМА РАЗДЕЛЬНОГО СБОРА И ТРАНСПОРТИРОВКИ МУСОРА | 2014 |
|
RU2638531C2 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ УНИЧТОЖЕНИЯ КОМАРОВ | 2016 |
|
RU2670123C2 |
| Автоматизированный комплекс для охраны территорий объектов с робототехнической системой | 2020 |
|
RU2759345C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |




Изобретение относится к снегоуборочной технике и может быть использовано для уборки снега с улиц, площадей населенных пунктов и городов, с пешеходных дорожек и тротуаров. Робот-снегоуборщик состоит из самоходной колесной машины (1) и содержит блок управления (6), включающий в свой состав компьютер (7) с внутренней памятью. К компьютеру (7) подключены ультразвуковой локационный датчик (9), устройство тревожной сигнализации (10) и приемно-передающее устройство (11). В робот-снегоуборщик также введены три базовых приемно-передающих устройства (12, 13, 14), располагаемые по периметру обрабатываемого участка и обеспечивающие связь по соответствующим радиоканалам с приемно-передающим устройством (11) блока управления (6). При этом в блок управления (6) введен датчик пройденного пути (8), подключенный к компьютеру. Технический результат, обеспечиваемый изобретением, заключается в улучшении маневренности и обеспечении работы робота-снегоуборщика круглые сутки. 5 ил.
Робот-снегоуборщик, состоящий из самоходной колесной машины, содержащий блок управления, включающий в свой состав компьютер с внутренней памятью, к которому подключены ультразвуковой локационный датчик, устройство тревожной сигнализации и приемно-передающее устройство, отличающийся тем, что введены три базовых приемно-передающих устройства, располагаемых по периметру обрабатываемого участка, обеспечивающих связь по соответствующим радиоканалам с приемно-передающим устройством блока управления, а в блок управления введен подключенный к компьютеру датчик пройденного пути.
| US 20140180478 A1, 26.06.2014 | |||
| Способ изготовления подкладки для клеевых резиновых сапожек | 1957 |
|
SU109762A1 |
| US 20140052335 A1, 20.02.2014 | |||
| ЛЕСНОЙ КОМБАЙН | 2013 |
|
RU2529170C1 |
| Робот-снегоуборщик OMI PLOW, производитель OMI ROBOTICS, электронный каталог, найдено онлайн https://robo-hunter.com/resume/robot-snegouborshik-omi-plow, размещено 26.01.2015 | |||
| МОБИЛЬНЫЙ РОБОТ | 2004 |
|
RU2274543C1 |

