Изобретение относится к трубопроводному транспорту и может быть использовано для контроля технического состояния магистрального газопровода (МГ) в местах его перехода через авто- и железные дороги.
Известна система того же назначения, содержащая защитный патрон, устройство контроля утечки газа из МГ, соединенное выходом с блоком обработки информации (БОИ), включающим в себя дифференциальный усилитель, подключенный входом через пороговое устройство к индикатору, и радиомодем, управляемый вход которого соединен с выходом порогового устройства, а выход - с рабочей станцией центра мониторинга (РСЦМ) /Патент РФ №2264578, Кл. F16L 7/00, F17D 5/02, 2005/.
Данная система принята за прототип.
Прототип помимо устройства контроля утечки газа из МГ также содержит преобразователь электрического сопротивления промежутка трубопровод - патрон, датчик коррозии МГ и датчик напряженно-деформированного состояния МГ.
Это позволяет достаточно надежно контролировать техническое состояние МГ в месте его перехода через авто- и железными дороги.
Недостатком прототипа является возможность контроля утечки газа из участка МГ небольшой протяженности.
Техническим результатом, получаемым от использования изобретения, является устранение отмеченного выше недостатка прототипа, то есть получение возможности контроля утечки газа на большой протяженности МГ.
Данный технический результат достигается за счет того, что в известной системе контроля утечки газа из МГ, содержащей защитный патрон, устройство контроля утечки газа из газопровода, соединенное выходом с БОИ, включающем в себя дифференциальный усилитель, подключенный выходом через пороговое устройство к индикатору, и радиомодем, управляемый вход которого соединен с выходом порогового устройства, а выход - с РСЦМ, устройство контроля утечки газа из газопровода выполнено в виде двухлучевого лазерного устройства, оптические оси которого параллельны оси газопровода, и оптически согласованного с лазерным устройством фотоприемного устройства, при этом частота первого зондирующего лазерного луча лазерного устройства совпадает, а второго - не совпадает со спектром поглощения транспортируемого по газопроводу газа, а выходы фотоприемного устройства подключены ко входам дифференциального усилителя.
При этом фотоприемные устройства могут быть расположены на двух мачтах, установленных по различные стороны дороги.
Антенна радиомодема может быть установлена на мачте с фотоприемным устройством.
Лазерное и фотоприемное устройства могут быть расположены на одной мачте, а их оптическое согласование осуществлено через дополнительно введенный светоотражатель, установленный на второй мачте, и полупрозрачный светоотражатель, установленный под углом 45° к оптической оси на первой мачте.
Антенна радиомодема может быть расположена на мачте с лазерным и фотоприемным устройством.
Фотоприемное устройство с дифференциальным усилителем может быть выполнено в виде дифференциального позиционно-чувствительного фотоприемника.
Зондирующие параллельные лучи лазерного устройства могут быть ориентированы в горизонтальной плоскости симметрично относительно оси газопровода.
Система может дополнительно содержать второе аналогичное лазерное устройство, оптически согласованное со вторым аналогичным фотоприемным устройством, при этом зондирующие параллельные лучи лазерного устройства ориентированы в вертикальной плоскости, проходящей через ось газопровода, а выходы второго фотоприемного устройства подключены ко входам дополнительного дифференциального усилителя, соединенного выходом с дополнительным пороговым устройством, подключенным выходом к управляемому входу радиомодема и индикатору.
Оба фотоприемных устройства с дифференциальными усилителями могут быть выполнены в виде квадрантного фотоприемника.
Двухлучевое лазерное устройство может быть выполнено на основе перестраиваемых по частоте лазеров.
Двухлучевое лазерное устройство может быть выполнено на основе импульсных лазеров, работающих в режиме свободной генерации с перестраиваемой частотой следования последовательности импульсов.
Частота второго зондирующего лазерного луча задается в диапазоне окон прозрачности атмосферы.
Окна прозрачности атмосферы для второго зондирующего лазерного луча выбираются в диапазонах длин волн 0,95-1,05 мкм; 1,2-1,3 мкм; 1,5-1,8 мкм; 2,1-2,4 мкм; 3,3-4,2 мкм; 4,5-5,0 мкм; 8-13 мкм.
Частота первого зондирующего лазерного луча задается в диапазоне спектра поглощения транспортируемых углеводородов, преимущественно метана.
Система может дополнительно содержать ВОЛС, вход которой оптически согласован с лазерными лучами лазерного устройства преимущественно через дополнительно введенный полупрозрачный светоотражатель, установленный на мачте с фотоприемным устройством, а выход - с дополнительно введенным фотоприемным устройством, установленным на рабочей станции центра мониторинга.
Перед фотоприемным устройством могут быть установлены узкополосные светофильтры на частоты зондирующих лазерных лучей.
Защитный патрон может быть снабжен вытяжной свечой, ось которой лежит в одной вертикальной плоскости с оптической осью двухлучевого лазерного устройства.
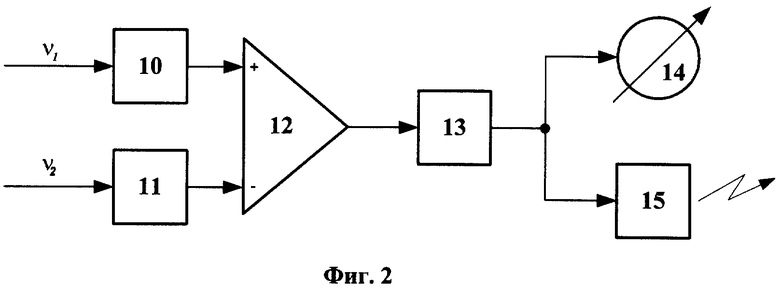
Изобретение поясняется чертежами. На фиг.1 представлена общая схема системы; на фиг.2 - его электронная схема.
Система содержит (фиг.1) защитный патрон 1 МГ 2, проложенного под железной дорогой 3. Имеется также устройство контроля утечки газа из МГ 2, выполненное в виде двухлучевого лазерного устройства 4, оптические оси которого параллельны оси МГ 2.
Двухлучевое лазерное устройство 4 может быть выполнено в виде двух лазеров, генерирующих когерентные лучи 5, 6 различной частоты. Частота ν1 луча 5 лазерного устройства 4 совпадает со спектром поглощения транспортируемого по МГ 2 газа (в основном метана), а частота ν2 лазерного луча 6 не совпадает со спектром поглощения транспортируемого газа.
Лазерное устройство 4 оптически согласовано с фотоприемным устройством 7, которое может быть выполнено в виде двух независимых фотоприемников, настроенных с помощью узкополосных фильтров (на чертеже не показаны) на частоты ν1 и ν2.
Лазерное и фотоприемное устройства 4, 7 расположены на двух различных мачтах 8, 9 по разные стороны дороги 3, но могут быть расположены на одной мачте, например, 8. В этом случае согласование лазерного и фотоприемного устройств 4, 7 осуществляется с помощью светоотражателя, установленного на мачте 9, и полупрозрачного светоотражателя, установленного под углом 45° к оптической оси на первой мачте (последняя оптическая схема на чертеже не приведена).
Выходы фотоприемников 10, 11 (фиг.2) фотоприемного устройства 4 подключены ко входам дифференциального усилителя 12, соединенного выходом через пороговое устройство 13 с индикатором 14 и управляемым входом радиомодема 15.
Передающая антенна радиомодема 15 (на чертеже не показана) может быть установлена на мачте 9 с фотоприемным устройством 7.
Для односторонней оптической схемы (на чертеже не показанной) передающая антенна радиомодема 15 устанавливается на мачте 4.
В частном случае фотоприемное устройство 7 с дифференциальным усилителем 12 и фотоприемниками 10, 11 может быть выполнено в виде дифференциального позиционно-чувствительного фотоприемника.
Лазерное устройство 4 может содержать еще пару лазеров, аналогичных первым, на частоты ν1 и ν2. Причем первая пара зондирующих лучей 5, 6 может лежать в горизонтальной плоскости, а вторая (на чертеже не приведена) - в вертикальной.
В последнем случае второе лазерное устройство оптически согласовывается со вторым аналогичным фотоприемным устройством, подключенным выходами ко входам второго дифференциального усилителя, соединенного выходом с дополнительным пороговым устройством, подключенным выходом к управляемому входу радиомодема 15 и индикатору 14 (данная оптическая и электронная схемы на чертеже не приведены).
В последнем случае оба фотоприемных устройства с дифференциальными усилителями выполняются в виде квадрантного фотоприемника (на чертеже не показан).
В частном случае двухлучевое лазерное устройство может быть выполнено на основе перестраиваемых по частоте лазеров, например, на химических красителях или на основе импульсных лазеров, работающих в режиме свободной генерации с перестраиваемой частотой следования последовательности импульсов. При этом частота второго зондирующего лазерного луча задается в диапазоне окон прозрачности атмосферы, в диапазонах длин волн 0,95-1,05 мкм; 1,2-1,3 мкм; 1,5-1,8 мкм; 2,1-2,4 мкм; 3,3-4,2 мкм; 4,5-5,0 мкм; 8-13 мкм, а частота первого зондирующего лазерного луча задается в диапазоне спектра поглощения транспортируемых углеводородов, преимущественно метана.
В качестве резервного канала связи система может дополнительно содержать ВОЛС, вход которой оптически связан с зондирующими лазерными лучами 5, 6 лазерного устройства 4.
Оптическая связь ВОЛС осуществляется обычными средствами, например, с помощью дополнительного полупрозрачного светоотражателя (на чертеже не показан), установленного перед фотоприемным устройством 7 на мачте 9.
Для уменьшения влияния световых помех перед фотоприемным устройством 7 устанавливают узкополосные фильтры на частоты ν1 и ν2.
Для надежной работы системы защитный патрон 1 снабжается вытяжной свечой 16, ось которой лежит в одной вертикальной плоскости с оптической осью двухлучевого лазерного устройства 4.
Система контроля состояния МГ 2 в местах их перехода через авто- и железные дороги работает следующим образом.
Перед эксплуатацией системы последнюю подвергают юстировке ее оптических элементов, при которой также выравнивают интенсивность лазерных лучей 5, 6.
При этом на выходе дифференциального усилителя 12 присутствует сигнал ниже уровня пороговых шумов. Данный сигнал не проходит через пороговое устройство 13.
При появлении нештатной ситуации, связанной с прорывом МГ 2, например, в зоне 17, транспортируемый газ 18 поднимается через вытяжную свечу 16 над дорогой 3 в зону расположения зондирующих лазерных лучей 5, 6. Это приводит к резкому ослаблению интенсивности зондирующего луча 5, связанному со спектральным поглощением лазерного излучения углеводородами. Ослабление происходит по экспоненциальному закону Бугера:
Il=I0exp (-αl),
где Il - интенсивность лазерного излучения, прошедшего путь l;
I0 - интенсивность излучения в начале трассы длиной l;
α - показатель ослабления лазерного излучения в углеводородах (метане).
При этом интенсивность I0 луча 6 не изменилась в присутствии углеводородов 18. Это приводит к тому, что на выходе дифференциального усилителя 12 появится сигнал, превышающий пороговое значение сигнала, задаваемого пороговым устройством 13.
Индикатор 14 зафиксирует эту аварийную ситуацию и подаст на соответствующие приборы (на чертеже не показаны) сигнал тревоги.
Одновременно сигнал тревоги поступит на управляемый вход радиомодема 15, который по радиоканалу направит его на РСЦМ.
В случае присутствия радиопомех сигнал тревоги направляется на РСЦМ по ВОЛС, являющейся резервным каналом связи.
Влияние амплитудных оптических факторов на работу системы будет незначительным, поскольку расстояние h между лучами (по сравнению с расстоянием лучей до земли Н берется малым, h/Н<0,01). Это приводит к тому, что оптические помехи будут одновременно воздействовать на оба луча 5, 6, не вызывая на выходе дифференциального усилителя 12 появления ложного сигнала тревоги.
Таким образом, на выходе системы присутствует оптический выходной сигнал, который может быть передан на РСЦМ не только по радиомодему, как в прототипе, но и по ВОЛС, что повышает надежность работы системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАГИСТРАЛЬНОГО ГАЗОПРОВОДА С УСТРОЙСТВОМ КАТОДНОЙ ЗАЩИТЫ | 2006 |
|
RU2308641C1 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ ЗА ТЕХНИЧЕСКИМ СОСТОЯНИЕМ МАГИСТРАЛЬНОГО ГАЗОПРОВОДА И ИНТЕЛЛЕКТУАЛЬНАЯ КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ КОЛОНКА ДЛЯ ЕЕ РЕАЛИЗАЦИИ | 2009 |
|
RU2393378C1 |
| СТАЦИОНАРНАЯ СИСТЕМА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ПЕРЕХОДА МАГИСТРАЛЬНОГО ТРУБОПРОВОДА ЧЕРЕЗ ДОРОГУ | 2007 |
|
RU2349824C2 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ ЗА ОПАСНЫМ УЧАСТКОМ МАГИСТРАЛЬНОГО ГАЗОПРОВОДА | 2007 |
|
RU2334163C1 |
| СИСТЕМА ДЛЯ НАБЛЮДЕНИЯ ЗА СОСТОЯНИЕМ ОПАСНОГО УЧАСТКА МАГИСТРАЛЬНОГО ГАЗОПРОВОДА | 2006 |
|
RU2317471C1 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ УТЕЧКИ ГАЗА ИЗ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ | 2016 |
|
RU2638136C1 |
| АВИАЦИОННЫЙ ЛАЗЕРНЫЙ ГАЗОАНАЛИЗАТОР ДЛЯ ОБНАРУЖЕНИЯ УТЕЧЕК ИЗ ТРУБОПРОВОДОВ | 1995 |
|
RU2086959C1 |
| СИСТЕМА КОНТРОЛЯ ПЕРЕХОДА ТРУБОПРОВОДА С УСТРОЙСТВОМ КАТОДНОЙ ЗАЩИТЫ ПОД АВТО- И ЖЕЛЕЗНЫМИ ДОРОГАМИ | 2004 |
|
RU2264578C1 |
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
Изобретение относится к газопроводному транспорту и может быть использовано для контроля технического состояния магистральных газопроводов в местах их пересечения авто- и железных дорог. В системе для контроля утечки газа из магистрального газопровода, содержащей защитный патрон, устройство контроля утечки газа из газопровода, соединенное выходом с блоком обработки информации, включающим в себя дифференциальный усилитель, подключенный выходом через пороговое устройство к индикатору, и радиомодем, управляемый вход которого соединен с выходом порогового устройства, а выход - с рабочей станцией центра мониторинга, устройство контроля утечки газа из газопровода выполнено в виде двухлучевого лазерного устройства, оптические оси которого параллельны оси газопровода, и оптически согласованного с лазерным устройством фотоприемного устройства, при этом частота первого зондирующего лазерного луча лазерного устройства совпадает, а второго - не совпадает со спектром поглощения транспортируемого по газопроводу газа, а выходы фотоприемного устройства подключены ко входам дифференциального усилителя. Фотоприемное устройство и электронная схема позволяют путем сравнения интенсивностей лазерных лучей ν1 и ν2 выявлять прорыв магистрального газопровода под дорогой и направлять на рабочую станцию центра мониторинга сигнал тревоги по радиомодему или по волоконно-оптической линии связи. 16 з.п. ф-лы, 2 ил.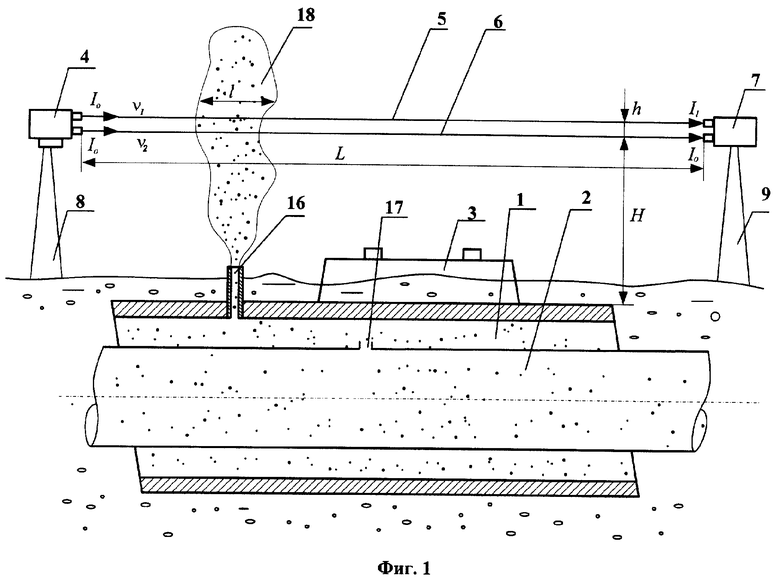
| СИСТЕМА КОНТРОЛЯ ПЕРЕХОДА ТРУБОПРОВОДА С УСТРОЙСТВОМ КАТОДНОЙ ЗАЩИТЫ ПОД АВТО- И ЖЕЛЕЗНЫМИ ДОРОГАМИ | 2004 |
|
RU2264578C1 |
| RU 2062394 C1, 20.06.1996 | |||
| СПОСОБ ВЫЯВЛЕНИЯ УЧАСТКОВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ, ПРЕДРАСПОЛОЖЕННЫХ К КОРРОЗИОННОМУ РАСТРЕСКИВАНИЮ ПОД НАПРЯЖЕНИЕМ (СТРЕСС-КОРРОЗИИ) | 1999 |
|
RU2147098C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ О РАЗРЫВЕ ПРОДУКТОПРОВОДА | 2002 |
|
RU2227861C2 |
| Способ контроля и регулирования режима работы трубопровода | 1990 |
|
SU1839706A3 |
| US 5708195 A, 13.01.1998. | |||

