Настоящее техническое решение относится к области автоматизированного видеонаблюдения за охраняемыми объектами и распознавания образов и ситуаций.
Известна система [1] видеонаблюдения с транспортного средства, находящегося в движении, содержащая установленную на транспортном средстве видеокамеру, подключенную через плату видеоввода к компьютеру, к которому подключено приемно-передающее устройство транспортного средства, обеспечивающее связь по радиоканалу через приемно-передающее устройство командного пункта с компьютером командного пункта, к которому подключен монитор наблюдения, на транспортном средстве установлен датчик измерения направления его перемещения, соединенный с компьютером транспортного средства, к которому подключен привод горизонтального и вертикального перемещения, соединенный с управляющим входом видеокамеры, при этом транспортное средство содержит дополнительно несколько видеокамер, подключенных к компьютеру через мультиплексор.
Недостатками этой системы видеонаблюдения с транспортного средства, находящегося в движении являются: недостаточная точность определения координат транспортного средства и выделенных объектов и связанная с этим низкая надежность контроля, так как их координаты определяются с помощью глобальной навигационной системы и отсутствие сигнала спутниковой навигации (например, в радиотени деревьев, крытых навесов и т.п.) приводит к неопределенности обозначения места положения транспортного средства; отсутствие четко выраженной траектории движения транспортного средства; ограниченность площади контролируемой (охраняемой) территории одним транспортным средством и невозможность организовать контроль на сложной территории, содержащей множество стационарных объектов, включающих здания и всевозможные сооружения.
Известна также система [2] видеонаблюдения с транспортного средства, находящегося в движении, содержащая несколько транспортных средств, число которых определяется сложностью и площадью охраняемой территории, каждое из которых содержит видеокамеру (высокого разрешения) с возможностью изменения ее фокусного расстояния, и (или) изменения диафрагмы, и (или) настройки на фокус для обеспечения наведения на цель, подключенную через плату видеоввода к компьютеру, к которому подключено приемно-передающее устройство транспортного средства, обеспечивающее связь по радиоканалу через приемно-передающее устройство командного пункта с компьютером командного пункта, к которому подключен монитор наблюдения, на транспортном средстве установлены датчик измерения направления его перемещения, датчик пройденного пути, ультразвуковой локационный датчик и устройство тревожной сигнализации, соединенные с компьютером транспортного средства, к которому подключены приводы горизонтального и вертикального перемещения видеокамеры (высокого разрешения), выходы которых соединены с соответствующими входами пары датчиков горизонтального и вертикального углов поворота, своими выходами подключенные к компьютеру транспортного средства, а транспортное средство дополнительно содержит несколько видеокамер, подключенных к компьютеру через мультиплексор, часть из которых, с перекрывающимися секторами обзора, образует систему кругового видеонаблюдения, а две видеокамеры, расположенные под определенным углом относительно друг друга, составляют систему стереонаблюдения, Недостатком этой системы видеонаблюдения с транспортного средства, находящегося в движении является необходимость прохождения оператором по охраняемой территории маршрута следования каждого из транспортных средств в процессе их «обучения», что довольно обременительно при протяженных территориях и неблагоприятных погодных условиях.
Наиболее близкой к предлагаемой системе видеонаблюдения с транспортного средства, находящегося в движении является система [3] видеонаблюдения с транспортного средства, находящегося в движении, содержащая несколько транспортных средств, число которых определяется сложностью и площадью охраняемой территории, каждое из которых содержит видеокамеру высокого разрешения с возможностью изменения ее фокусного расстояния, и (или) изменения диафрагмы, и (или) настройки на фокус для обеспечения наведения на цель, подключенную через плату видеоввода к компьютеру, к которому подключено приемно-передающее устройство транспортного средства, обеспечивающее связь по радиоканалу через приемно-передающее устройство командного пункта с компьютером командного пункта, к которому подключен монитор наблюдения, на транспортном средстве установлены датчик измерения направления его перемещения, датчик пройденного пути, ультразвуковой локационный датчик и устройство тревожной сигнализации, соединенные с компьютером транспортного средства, к которому подключены приводы горизонтального и вертикального перемещения видеокамеры высокого разрешения, выходы которых соединены с соответствующими входами пары датчиков горизонтального и вертикального углов поворота, своими выходами подключенные к компьютеру транспортного средства, а транспортное средство дополнительно содержит несколько видеокамер, подключенных к компьютеру через мультиплексор, часть из которых, с перекрывающимися секторами обзора, образует систему кругового видеонаблюдения, две видеокамеры, расположенные под определенным углом относительно друг друга, составляют систему стереонаблюдения и второе приемно-передающее устройство транспортного средства, обеспечивающее связь по отдельному радиоканалу с дополнительным приемо-передающим устройством.
Недостатками этой системы видеонаблюдения с транспортного средства, находящегося в движении, являются недостаточные надежность и точность системы.
Недостаточная надежность системы обусловлена необходимостью иметь опорные объекты (здания, деревья, фонари и т.п.) для формирования маршрута движения транспортного средства, которые не являются стабильными (например, деревья могут быть спилены, здания разрушены и т.п.), что приводит к сбоям системы, необходимости новой подготовки охраняемой территории и повторного «обучения» транспортных средств.
Недостаточная точность движения транспортного средства по заданному маршруту обусловлена значительными размерами используемых опорных объектов, что приводит к большим погрешностям в определении угла поворота ϕ, значение которого наряду с расстоянием используется для определения координатных точек заданного маршрута.
Целью изобретения является повышение надежности и точности системы путем формирования маршрута движения транспортных средств без использования опорных объектов.
Для достижения поставленной цели в систему видеонаблюдения с транспортных средств, находящегося в движении, содержащую несколько транспортных средств, число которых определяется сложностью и площадью охраняемой территории, каждое из которых содержит видеокамеру высокого разрешения с возможностью изменения ее фокусного расстояния, и (или) изменения диафрагмы, и (или) настройки на фокус для обеспечения наведения на цель, подключенную через плату видеоввода к компьютеру, к которому подключено первое приемно-передающее устройство транспортного средства, обеспечивающее связь по радиоканалу через приемно-передающее устройство командного пункта с компьютером командного пункта, к которому подключен монитор наблюдения, на транспортном средстве установлены датчик измерения направления его перемещения, датчик пройденного пути, ультразвуковой локационный датчик и устройство тревожной сигнализации, соединенные с компьютером транспортного средства, к которому подключены приводы горизонтального и вертикального перемещения видеокамеры высокого разрешения, выходы которых соединены с соответствующими входами пары датчиков горизонтального и вертикального углов поворота, своими выходами подключенные к компьютеру транспортного средства, а транспортное средство дополнительно содержит несколько видеокамер, подключенных к компьютеру через мультиплексор, часть из которых, с перекрывающимися секторами обзора, образует систему кругового видеонаблюдения, две видеокамеры, расположенные под определенным углом относительно друг друга, составляют систему стереонаблюдения и второе приемно-передающее устройство транспортного средства, обеспечивающее связь по отдельному радиоканалу с первым дополнительным приемо-передающим устройством, введены по меньшей мере еще два дополнительных приемо-передающих устройства, обеспечивающих связь по отдельному радиоканалу со вторым приемопередающим устройством транспортного средства, выход которого подключен к входу преобразователя интервалов времени в цифровой код, управляющий вход которого соединен с управляющим входом второго приемо-передающего устройства транспортного средства и компьютером транспортного средства, соединенного с выходом преобразователя интервалов времени в цифровой код.
Сущность изобретения поясняется на чертежах (фиг. 1 и фиг. 2), где на фиг. 1 приведена структурная схема системы на примере одного транспортного средства, а на фиг. 2 принцип ее работы с использованием нескольких транспортных средств.
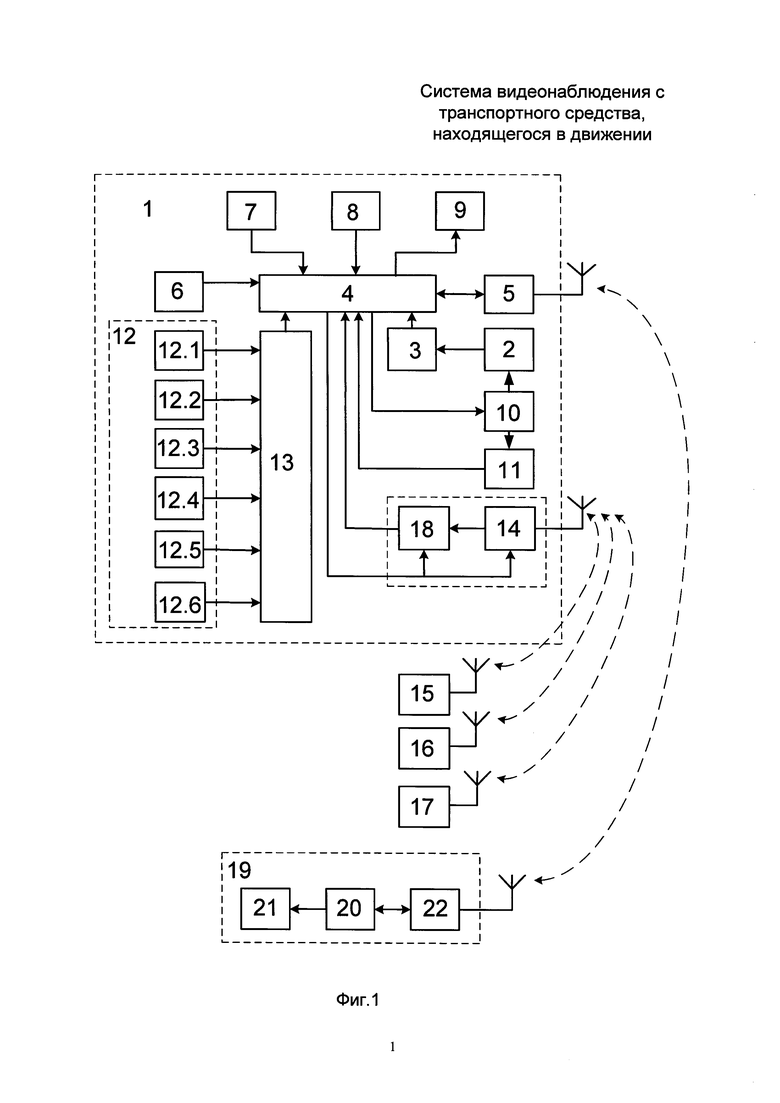
На каждом транспортном средстве 1 (фиг. 1), число которых выбирается с учетом сложности и протяженности охраняемой территории, установлена видеокамера 2 высокого разрешения, с возможностью изменения фокусного расстояния, и (или) изменения диафрагмы, и (или) настройки на фокус для обеспечения наведения на цель, подключенная через плату видеоввода 3 к компьютеру 4, к которому подключено первое приемно-передающее устройство 5 транспортного средства с антенной. К компьютеру 4 также подключены датчик 6 измерения направления перемещения (компас или гироскоп), датчик 7 пройденного пути (одометр), ультразвуковой локационный датчик 8 и устройство 9 тревожной сигнализации (сирена и проблесковый фонарь). Видеокамера 2 высокого разрешения также оборудована приводами 10 горизонтального и вертикального перемещения, ко вторым выходам которых подключена пара датчиков 11 горизонтального и вертикального углов поворота видеокамеры 2 высокого разрешения. Выходы датчиков 11 горизонтального и вертикального углов поворота и управляющие входы приводов 10 горизонтального и вертикального перемещения видеокамеры 2 высокого разрешения подключены к компьютеру 4, к которому также подключены дополнительные видеокамеры 12 через мультиплексор 13.
Из числа дополнительных видеокамер 12, например, четыре (12.1-12.4), образуют устройство кругового видеообзора с фиксацией движущихся объектов, две видеокамеры (12.5, 12.6, устанавливаемые в передней части транспортного средства) образуют устройство стереонаблюдения, для фиксации инородных предметов, мешающих передвижению транспортного средства по заданному маршруту.
На транспортном средстве также установлено второе приемно-передающее устройство 14 с антенной, обеспечивающее связь по отдельному радиоканалу с приемо-передающими устройствами 15, 16, 17. Выход второго приемо-передающего устройства 14 транспортного средства подключен к входу преобразователя 18 интервалов времени в цифровой код, управляющий вход которого соединен с управляющим входом второго приемо-передающего устройства 14 транспортного средства и компьютером 4 транспортного средства, соединенного с выходом преобразователя 18 интервалов времени в код.
Примечание - В качестве второго приемо-передающего устройства 14 и преобразователя 18 интервалов времени в цифровой код может быть использован единый модуль (радиочип) DW1000 ScenSor компании Deca Wave.
На командном пункте 19 находится компьютер 20 командного пункта, к которому подключен монитор 21 наблюдения и приемно-передающее устройство 22 командного пункта с антенной, обеспечивающее связь с первым приемо-передающим устройством 5 транспортного средства.
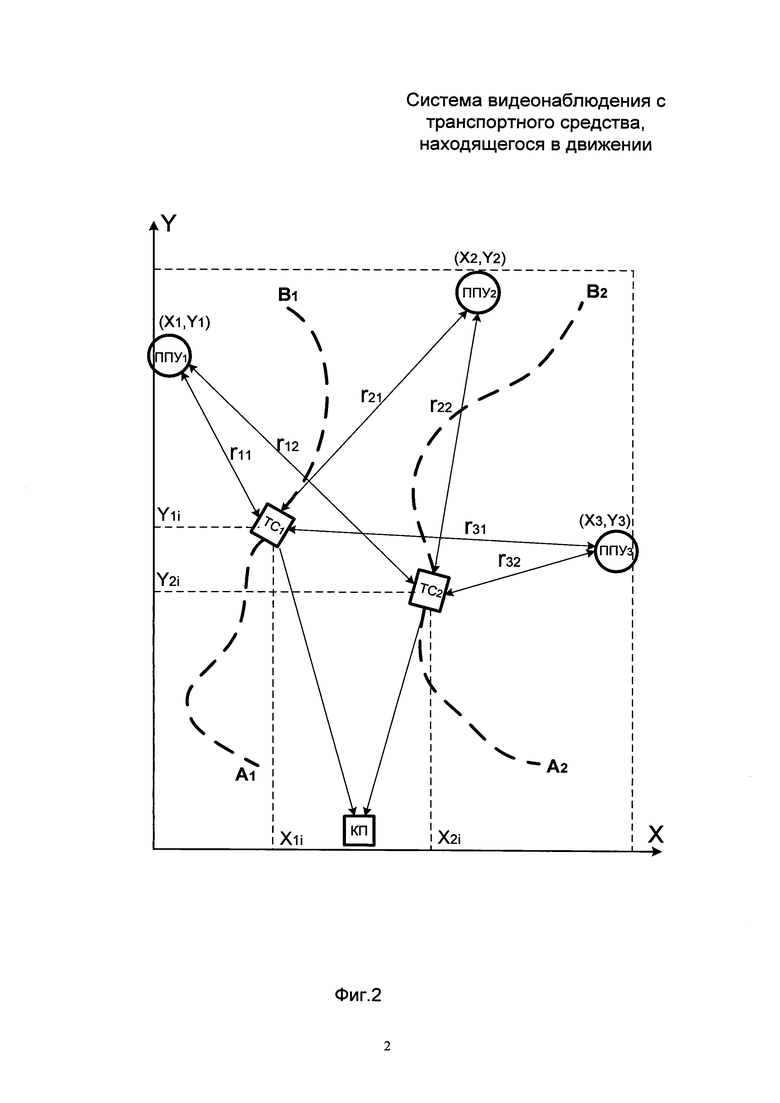
Перед практическим применением системы видеонаблюдения проводят подготовку охраняемой территории (см. фиг. 2) и «обучение» каждого транспортного средства (ТС) для его автономного движения по заданному маршруту. С этой целью по периметру охраняемой территории устанавливают не менее трех дополнительных приемо-передающих устройств (ППУ1-ППУ3) и, с помощью геодезических приборов или спутниковых навигационных систем (GPS, ГЛОНАСС), определяют их точное местоположение на местности в координатах (X1, Y1), (X2, Y2), (X3, Y3). Далее на карте-схеме охраняемой территории, представленной на мониторе 21 командного пункта (КП) 19, с обозначенными на ней дополнительными ППУ, прокладывают траектории движения от точки А до точки В каждого транспортного средства системы видеонаблюдения и выбирают их количество (на фиг. 2, для простоты изложения в качестве примера, представлены два транспортных средства) с таким расчетом, чтобы обеспечить контроль за каждым участком возможного проникновения злоумышленников на охраняемую территорию.
Далее оператор с компьютера 20 командного пункта 19 через приемопередающие устройства 22 и 5 заносит в память компьютера 4 каждого транспортного средства информацию об их маршруте движения в координатах (X1i, Y1i), (X2i, Y2i),…, (Xni, Yni) через заданные расстояния, где n - порядковый номер транспортного средства.
В процессе движения транспортных средств по заданному маршруту приемо-передающие устройства 14 каждого из них по команде с компьютеров 4 периодически посылают радиосигналы на дополнительные ППУ1-ППУ3, которые переизлучают их обратно к соответствующим приемо-передающим устройствам 14. Интервалы времени (tin) между моментами передачи радиосигналов приемо-передающими устройствами 14 и их обратным приемом преобразуются преобразователями 18 в цифровой код, который пересчитывается компьютерами 4 в расстояния (rin) по известной формуле:
rin=С⋅tin,
где С - скорость распространения радиоволн.
Учитывая, что между текущими координатами Xni, Yni транспортных средств на местности и измеренными расстояниями r1n, r2n, r3n до дополнительных ППУ1-ППУ3, при известных координатах ППУ, существует прямая зависимость, то контролируя расстояния r1n, r2n, r3n компьютеры 4 транспортных средств автоматически контролируют (и при необходимости корректируют) траекторию движения транспортных средств по заданному маршруту.
В процессе движения транспортного средства по заданной траектории камеры 12.1-12.4 кругового обзора (каждая в своем секторе) фиксируют наличие на охраняемом участке движущихся объектов и, при их обнаружении, компьютер 4, с помощью приводов 10 горизонтального и вертикального поворота наводит видеокамеру 2 высокого разрешения на обнаруженный движущийся объект, дает команду на устройство 9 также посредством приемно-передающего устройства 5 транспортного средства передает на командный пункт 19 видеосигнал для отображения на мониторе 21 возникшей ситуации и принятия решения.
В случае появления на пути следования транспортного средства посторонних непреодолимых предметов они последовательно обнаруживаются стереокамерами 12.5, 12.6 и идентифицируются как непреодолимые ультразвуковым локационным датчиком 8. Транспортное средство обходит препятствие и, ориентируясь по ранее записанным в памяти компьютера 4 координатам, вновь выходит на заданную траекторию движения.
Литература
1 Патент RU 2326445 С2, (аналог). Способ и система видеонаблюдения с транспортного средства, находящегося в движении. Опубликовано в БИ №16 от 10.06.2008 г.
2 Патент RU 106785 U1 на полезную модель, (аналог). Система видеонаблюдения с транспортного средства, находящегося в движении. Опубликовано 20.07.2011 г.
3 Патент RU 114202 U1 на полезную модель, (прототип). Система видеонаблюдения с транспортного средства, находящегося в движении. Опубликовано 10.03.2012 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ С ТРАНСПОРТНОГО СРЕДСТВА, НАХОДЯЩЕГОСЯ В ДВИЖЕНИИ | 2015 |
|
RU2626251C2 |
| СИСТЕМА РАЗДЕЛЬНОГО СБОРА И ТРАНСПОРТИРОВКИ МУСОРА | 2014 |
|
RU2638531C2 |
| СПОСОБ И СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ С ТРАНСПОРТНОГО СРЕДСТВА, НАХОДЯЩЕГОСЯ В ДВИЖЕНИИ | 2006 |
|
RU2326445C2 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ УТЕЧКИ ГАЗА ИЗ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ | 2016 |
|
RU2638136C1 |
| РОБОТ-СНЕГОУБОРЩИК | 2015 |
|
RU2636402C2 |
| Малокадровая система видеонаблюдения для контроля протяженных рубежей охраны | 2017 |
|
RU2639051C1 |
| МАЛОКАДРОВАЯ МОБИЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ | 2012 |
|
RU2504015C1 |
| Интеллектуальная сетевая система мониторинга охраняемой территории | 2016 |
|
RU2629521C1 |
| КЛАСТЕРНАЯ СИСТЕМА МОНИТОРИНГА ПЕРИМЕТРОВ И ТЕРРИТОРИЙ ОБЪЕКТОВ | 2015 |
|
RU2601164C2 |
| КОМПЛЕКС ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ОХРАНЯЕМОЙ ТЕРРИТОРИЕЙ | 2013 |
|
RU2542873C1 |
Система видеонаблюдения с транспортных средств 1, в которой видеонаблюдение осуществляют с нескольких транспортных средств (ТС), двигающихся по заданным траекториям. Каждое ТС оборудовано видеокамерой 2, подключенной через плату видеоввода 3 к компьютеру 4, имеющему первое приемно-передающее устройство (ППУ) 5, посредством которого реализуется радиосвязь с ППУ 22, компьютером 20 и монитором 21 командного пункта (КП) 19. На ТС установлены и подключены к компьютеру 4 датчик 6 измерения направления перемещения, датчик 7 пройденного пути, ультразвуковой локационный датчик 8, устройство 9 тревожной сигнализации, пара датчиков 11 горизонтального и вертикального углов поворота видеокамеры 2 и приводы 10 горизонтального и вертикального перемещения видеокамеры 2, подключенные к входам пары датчиков 11, дополнительные видеокамеры 12 с мультиплексором 13, из которых четыре образуют систему кругового обзора, а две - стереонаблюдение. На ТС установлено второе ППУ 14, управляемое компьютером 4, осуществляющее радиосвязь по отдельному радиоканалу с тремя ППУ 15, 16, 17, расположенными по периметру охраняемой территории, для определения текущих координат ТС. Выход ППУ 14 соединен с преобразователем 18 интервалов времени в цифровой код, который поступает в компьютер 4 для его пересчета в текущее расстояние между ТС и ППУ 15, 16, 17. Система видеонаблюдения позволяет осуществлять «обучение» ТС прохождению маршрута по охраняемой территории дистанционно с высокой точностью без наличия опорных объектов. 2 ил.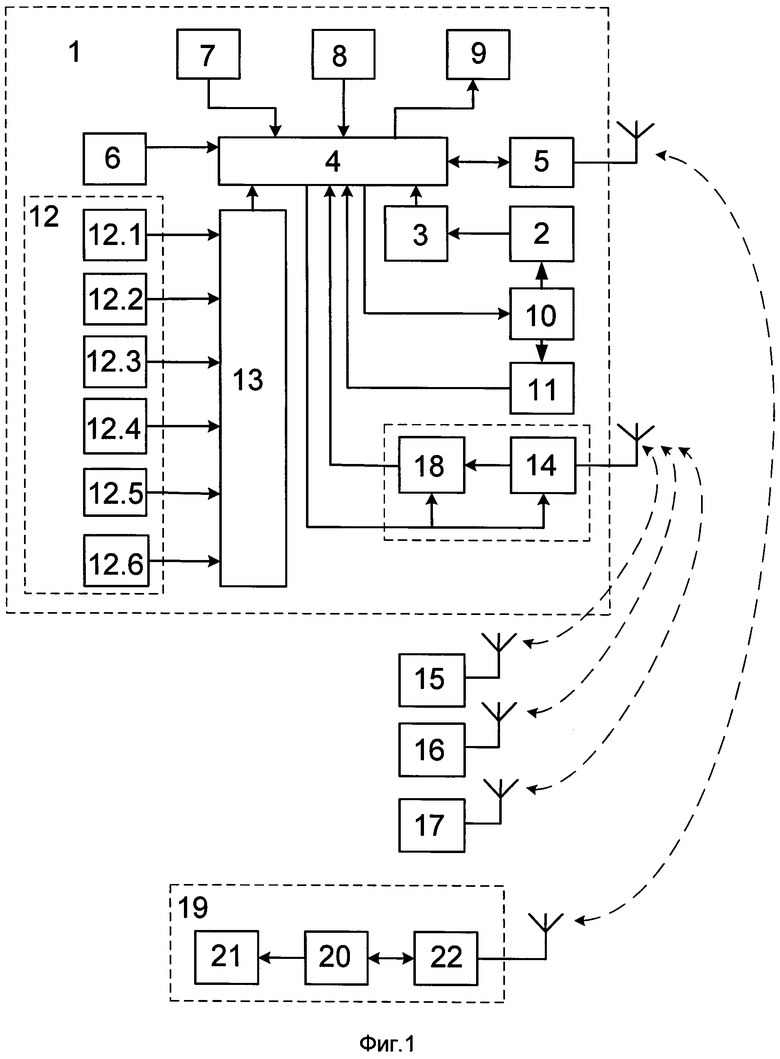
Система видеонаблюдения с транспортных средств, находящихся в движении, содержащая несколько транспортных средств, число которых определяется сложностью и площадью охраняемой территории, каждое из которых содержит видеокамеру высокого разрешения с возможностью изменения ее фокусного расстояния, и (или) изменения диафрагмы, и (или) настройки на фокус для обеспечения наведения на цель, подключенную через плату видеоввода к компьютеру, к которому подключено первое приемно-передающее устройство транспортного средства, обеспечивающее связь по радиоканалу через приемно-передающее устройство командного пункта с компьютером командного пункта, к которому подключен монитор наблюдения, на транспортном средстве установлены датчик измерения направления его перемещения, датчик пройденного пути, ультразвуковой локационный датчик и устройство тревожной сигнализации, соединенные с компьютером транспортного средства, к которому подключены приводы горизонтального и вертикального перемещения видеокамеры высокого разрешения, выходы которых соединены с соответствующими входами пары датчиков горизонтального и вертикального углов поворота, своими выходами подключенные к компьютеру транспортного средства, а транспортное средство дополнительно содержит несколько видеокамер, подключенных к компьютеру через мультиплексор, часть из которых, с перекрывающимися секторами обзора, образует систему кругового видеонаблюдения, две видеокамеры, расположенные под определенным углом относительно друг друга, составляют систему стереонаблюдения и второе приемно-передающее устройство транспортного средства, обеспечивающее связь по отдельному радиоканалу с первым дополнительным приемо-передающим устройством, отличающаяся тем, что введены по меньшей мере еще два дополнительных приемо-передающих устройства, обеспечивающих связь по отдельному радиоканалу со вторым приемно-передающим устройством транспортного средства, выход которого подключен к входу преобразователя интервалов времени в цифровой код, управляющий вход которого соединен с управляющим входом второго приемно-передающего устройства транспортного средства и компьютером транспортного средства, соединенного с выходом преобразователя интервалов времени в цифровой код.
| Способ удаления коллекторов с поверхности сульфидных минералов | 1956 |
|
SU106785A1 |
| СИСТЕМА И СПОСОБ АВТОМАТИЗИРОВАННОГО ВИДЕОНАБЛЮДЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ И СИТУАЦИЙ | 2003 |
|
RU2268497C2 |
| US 2008136914 A1, 12.06.2008 | |||
| US 2002005869 A1, 17.01.2002. | |||

