УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится в целом к операциям бурения скважин, в частности к системам и способам оптимизации измерений градиента в операциях дальнометрии.
В некоторых случаях, таких как выброс, может оказаться необходимым пересечь первую скважину, называемую целевой скважиной, со второй скважиной, называемой разгрузочной скважиной. Вторая скважина может быть пробурена с целью пересечения целевой скважины, например, для сброса давления из скважины с неуправляемым выбросом. Установление контакта целевой скважины с разгрузочной скважиной, как правило, требует множества скважинных измерений для определения точного местоположения целевой скважины. Одним из таких измерений является измерение градиента, который определяет изменения в электромагнитном поле в формации. Точность измерений градиента может зависеть от расстояния между датчиками, измеряющими градиент электромагнитного поля. К сожалению, большая часть внутрискважинных буровых снарядов и операций обеспечивает небольшую гибкость относительно расстояния между такими датчиками с целью определения градиента.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Некоторые конкретные примеры вариантов осуществления изобретения могут быть понятны со ссылками, в том числе, на следующее описание и прилагаемые чертежи.
Фиг. 1A и 1B иллюстрируют пример буровых систем в соответствии с аспектами настоящего изобретения.
На фиг. 2 показан пример добавочного корпуса для датчиков согласно аспектам настоящего изобретения.
На фиг. 3 показан пример добавочного корпуса для датчиков согласно аспектам настоящего изобретения.
На фиг. 4 показан пример добавочного корпуса для датчиков согласно аспектам настоящего изобретения.
На фиг. 5 показан пример добавочного корпуса для датчиков согласно аспектам настоящего изобретения.
На фиг. 6A и 6B показан пример добавочного корпуса для датчиков согласно аспектам настоящего изобретения.
На фиг. 7 показан пример добавочного корпуса для датчиков согласно аспектам настоящего изобретения.
Хотя варианты осуществления настоящего изобретения изображены и описаны, а также определены со ссылками на примеры вариантов осуществления настоящего изобретения, такие ссылки не подразумевают ограничения изобретения, и никакие ограничения не должны подразумеваться. Предмет изобретения может быть подвержен существенной модификации, изменению и может иметь эквиваленты по форме и функции, которые будут встречаться специалистам в данной области техники, для которых очевидны преимущества настоящего изобретения. Изображенные и описанные варианты осуществления настоящего изобретения являются только примерами и не исчерпывают объем настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Настоящее изобретение относится, в целом, к операциям бурения скважин, в частности к системам и способам оптимизации измерений градиента в операциях дальнометрии.
Иллюстративные варианты осуществления настоящего изобретения подробно описаны в настоящем документе. Для ясности в настоящем описании могут быть приведены не все особенности фактического осуществления. Следует отметить, что при разработке любого такого реального варианта осуществления для достижения конкретных целей воплощения должны приниматься многочисленные решения для конкретного воплощения, которые будут изменяться от одного воплощения другому. Кроме того, следует иметь в виду, что такая разработка может быть сложной и трудоемкой, но, тем не менее, благодаря этому описанию, быть рутинным делом для специалиста в данной области техники.
Для облегчения понимания настоящего изобретения приведены следующие примеры конкретных вариантов осуществления. Следующие примеры никоим образом не следует понимать, как ограничивающие или определяющие объем настоящего изобретения. Варианты осуществления настоящего изобретения могут быть применимы к операциям бурения, которые включают в себя, помимо прочего, целевую скважину (такую как соседняя скважина) с последующим целевым пересечением, обнаружением местоположения целевой скважины, сдваиванием скважины, например, в структурах скважины с паровым самотечным дренажем (SAGD, steam assist gravity drainage), бурение разгрузочных скважин для неуправляемых скважин, пересечений рек, сооружения туннелей, а также горизонтальных, вертикальных, наклонных, разветвленных горизонтальных скважин, соединений двухколенчатых труб, мест пересечения, обвода (обуривания прихваченного на средней глубине в скважине инструмента и назад в скважину под ним), или иных нелинейных скважин в любом виде подземной формации. Варианты осуществления могут быть применимы к нагнетательным скважинам и эксплуатационным скважинам, в том числе, эксплуатационным скважинам природных источников, таких как сероводородные, углеводородные или геотермальные скважины; а также к сооружению стволов скважин для пересекающих реки туннелей и других подобных туннельных стволов скважин, предназначенных для приповерхностного строительства, или скважинных двухколенчатых трубопроводов, используемых для транспортирования текучих сред, таких как углеводороды. Описанные ниже варианты осуществления со ссылками на одно исполнение не предназначены для ограничения объема изобретения.
Согласно аспектам настоящего изобретения в настоящем документе описаны системы и способы оптимизации измерений градиента в операциях дальнометрии. Система может содержать бурильное устройство, включающее в себя первую часть и вторую часть. В некоторых вариантах осуществления первая часть может содержать оборудование низа бурильной колонны (bottom hole assembly, BHA) или бурильную колонну, а вторая часть может содержать добавочный корпус для датчиков. Первая часть может иметь первый диаметр, а вторая часть может иметь второй диаметр, который больше первого диаметра. В некоторых вариантах осуществления вторая часть может содержать множество лопаток, и диаметр второй части может включать в себя диаметр добавочного корпуса для датчиков на поверхности лопаток, который может приближаться к диаметру ствола скважины.
Система также может содержать пару датчиков, расположенных во второй части и вблизи наружной радиальной поверхности второй части. Пара датчиков может включать в себя, помимо прочего, датчик индукционного типа, магнитометрический датчик на эффекте Холла, магнитный градиентометр или комбинацию, или пару любых указанных выше датчиков. Наружная радиальная поверхность второй части может включать в себя поверхности лопаток добавочного корпуса для датчиков. Пара датчиков может быть распределена между двумя лопатками, при этом каждый датчик из пары датчиков расположен в углубленном участке и вблизи поверхности отдельной лопатки. В некоторых вариантах осуществления отдельные лопатки могут быть диаметрально противоположны относительно продольной оси второй части, что доводит до максимума радиальное расстояние между парой датчиков и увеличивает точность измерений градиента, что будет описано ниже.
Процессор может иметь сообщение с буровым снарядом и, в частности, с парой датчиков. Процессор может определять по меньшей мере одно измерение градиента по меньшей мере частично на основании выходных данных пары датчиков. Точность и/или чувствительность может быть увеличена путем увеличения расстояния между отдельными датчиками пары датчиков в добавочном корпусе для датчиков, чтобы измерять максимальную разность в электромагнитном поле, наложенном на электромагнитное поле земли. Например, расстояние между датчиками в плоскости x/y может быть увеличено путем установки датчиков в добавочном корпусе для датчиков с лопатками, которые, как правило, приближены или равны диаметру ствола скважины, в то же время обеспечивая промежуток для выноса бурового шлама, что позволяет буровому шламу и буровому раствору перемещаться вверх в кольцевом зазоре во время бурения. В некоторых вариантах осуществления может оказаться предпочтительным не иметь лопаток добавочного корпуса для датчиков, соприкасающихся со стенкой скважины во время бурения, поскольку это может мешать задачам навигации опорной скважины.
На фиг. 1A показан пример буровой системы 100 согласно аспектам настоящего изобретения. Буровая система 100 содержит буровую установку 101 на поверхности 105 и установлена над скважиной 106 в подземной формации 102. Буровая установка 101 может быть связана с буровым снарядом 107, включающим в себя бурильную колонну 108 и оборудование 109 низа бурильной колонны (bottom hole assembly, BHA). BHA 109 может включать в себя буровое долото 113, устройство 111 MWD (измерений во время бурения) и добавочный корпус 110 для датчиков. Добавочный корпус 110 для датчиков может содержать по меньшей мере одну пару 114 датчиков. Как указано выше, по меньшей мере одна пара 114 датчиков может включать в себя, помимо прочего, датчик индукционного типа, магнитометрический датчик на эффекте Холла, магнитный градиентометр или комбинацию, или пару любых указанных выше магнитометров. В некоторых вариантах осуществления добавочный корпус 110 для датчиков может быть расположен в различных местах внутри BHA 109 или выше BHA 109, например между бурильной колонной 108 и BHA 109. Может оказаться предпочтительным устанавливать добавочный корпус 110 для датчиков как можно ближе к нижней части скважины, насколько возможно. Например, в некоторых вариантах осуществления по меньшей мере одна пара 114 датчиков может быть расположена в буровом долоте 113, а не в блоке BHA, где-то выше бурового долота 113.
Добавочный корпус 110 для датчиков может содержать наружную радиальную поверхность. В показанном варианте осуществления наружная радиальная поверхность образована множеством лопаток, с множеством лопаток, содержащих две диаметрально противоположные пары лопаток. Наружная радиальная поверхность может быть образована лопатками и может устанавливать диаметр 116 добавочного корпуса 110 для датчиков. В показанном варианте осуществления диаметр 116 добавочного корпуса 110 для датчиков может быть охарактеризован как расстояние между наружными поверхностями пары диаметрально противоположных лопаток относительно продольной оси добавочного корпуса 110 для датчиков. Следует заметить, что диаметр 116 добавочного корпуса 110 для датчиков может приближаться к диаметру ствола скважины 106.
В некоторых вариантах осуществления бурильная колонна 108 или BHA 109 может содержать первую часть бурового снаряда 107, а добавочный корпус 110 для датчиков может содержать вторую часть бурового снаряда 107. Первая часть может иметь первый диаметр 115, а вторая часть может иметь второй диаметр 116, который больше первого диаметра 115. Как показано, первый диаметр 115 может включать в себя диаметр бурильной колонны 108 или BHA 119. Первый диаметр 115 может быть постоянным или переменным, если в BHA 109 используются различные типы инструментов для измерений во время бурения (MWD). При этом различные диаметры первой части могут быть меньше, чем диаметр 116 добавочного корпуса 110 для датчиков.
Измерения расстояния могут потребовать, чтобы местоположение скважины 103 было определено. Ствол скважины 103 может включать в себя целевую скважину, содержащую электропроводный элемент или состоящую из электропроводного элемента, такого как обсадная труба, потайная колонна или бурильная колонна, или любая ее часть, в которой произошел выброс, или которую необходимо пересекать, сопровождать или обходить. В показанном варианте осуществления ствол скважины 103 включает в себя электропроводную обсадную трубу 140. Определение местоположения целевой скважины 103 может включать в себя выполнение различных измерений. Данные измерения могут включать в себя измерения пропускаемого тока, текущего по целевой скважине 103, с помощью методов возбуждения, таких как электроды каротажного кабеля, основные электроды BHA, или возбуждение непосредственно обсадной трубы 150 целевой скважины. Данные измерения могут включать в себя различные измерения электромагнитных полей в формации, такие как градиент в электромагнитном поле. Измерения градиента или измерения абсолютного магнитного поля могут определить расстояние и направление к целевой скважине 103, что пригодно для определения местоположения целевой скважины 103.
Буровой снаряд 107 может включать в себя переводник 112 зазора, который может обеспечивать создание электрического поля диполя, создаваемого в зазоре, для обеспечения протекания тока из бурильной колонны в формацию 102. В показанном варианте осуществления зависящий от времени ток 134 может быть индуцирован в формацию 102 путем подачи энергии к части бурового снаряда 107 над переводником 112 зазора. Вследствие высокой проводимости обсадной трубы 140 в целевой скважине 103, окружающей формации 103, часть индуцированного тока 134 может быть сконцентрирована на обсадной трубе 140 в целевой скважине 103, и ток 138 на обсадной трубе 140 может возбуждать электромагнитное поле (EM) 136 в радиальном направлении от направления потока электрического тока 138. Остальной индуцированный ток 134 может быть получен в части бурового снаряда 107 под переводником 112 зазора. Использование зависимого от времени тока 134 может подходить для обнаружения индуцированного электромагнитного поля 136 EM путем обнаружения электромагнитного поля 136 EM, превышающего фоновое магнитное поле земли. Зависимый от времени ток 134 может принимать различные формы, в том числе, форму синусоиды, прямоугольных импульсов, пилообразных импульсов и др.
Согласно аспектам настоящего изобретения по меньшей мере одна пара 114 датчиков может быть расположена в добавочном корпусе 110 для датчиков, вблизи наружной радиальной поверхности добавочного корпуса 110 для датчиков. Следует заметить, что пара датчиков для измерений градиента может быть выровнена в плоскости, с точностью измерения градиента, зависящей от расстояния между датчиками в плоскости. Пара 114 датчиков может выполнять независимые измерения электромагнитного поля 136 EM, которые могут быть использованы совместно для определения величины градиента электромагнитного поля 116 EM, как будет описано ниже. Предпочтительно, расположение пар 114 датчиков в лопатках добавочного корпуса 110 для датчиков может обеспечить увеличение расстояния между парой датчиков в плоскости x/y, которая перпендикулярна продольной оси добавочного корпуса 110 для датчиков, что может увеличить точность величины градиента. Таким образом, как видно, расстояние между парами 114 датчиков может быть доведено до максимума в степени, допускаемой стволом скважины 106.
В некоторых вариантах осуществления буровой снаряд 107, включающий пару 114 датчиков и другое измерительное оборудование, может быть связан с блоком 104 управления, расположенным на поверхности 105. Блок 104 управления может содержать процессор и запоминающее устройство, связанное с процессором, которое может предписывать процессору управлять действием бурового снаряда 107, принимать выходные данные от пары 114 датчиков и другого измерительного оборудования и определять некоторые измеренные величины, такие как величина градиента, на основании по меньшей мере части выходных данных пары 114 датчиков и другого измерительного оборудования. Хотя блок 104 управления расположен на поверхности, некоторые элементы обработки, памяти и управления могут быть расположены внутри бурового снаряда 107.
В некоторых вариантах осуществления пары 114 датчиков могут иметь сообщение с системой управления курсом, которая может включать весь блок 104 управления или его элементы. Например, система управления курсом может содержать автоматическую систему управления курсом, расположенную либо внутри бурового снаряда 107, либо на поверхности 104. Система управления курсом может принимать данные измерений от пары 114 датчиков, определять величину градиента, а затем автоматически корректировать направление бурения бурового снаряда для пересечения, слежения или обхода целевой скважины 103, в зависимости от эксплуатационных требований. В других вариантах осуществления системой управления курсом может по меньшей мере частично управлять рабочий, находящийся на поверхности. В таких случаях пары 114 датчиков могут все еще иметь сообщение с блоком 104 управления на поверхности, который может определять величину градиента электромагнитного поля 136, но направлением бурения можно управлять вручную.
На фиг. 1B показан пример буровой системы 150 согласно аспектам настоящего изобретения. Как должно быть понятно специалисту в данной области при рассмотрении настоящего изобретения, фиг. 1B иллюстрирует буровую систему 150, использующую добавочный корпус 154 для датчиков, и по меньшей мере одну пару 156 датчиков, подобно соответствующим элементам на фиг. 1A. Буровая система 150 содержит различные схемы возбуждения, однако они в равной степени применимы к добавочным корпусам для датчиков, описанным в настоящем документе. Как показано, схема возбуждения может содержать каротажный кабель 158, расположенный в стволе скважины 160. Каротажный кабель может включать в себя изолированную часть 158a и неизолированную часть 158b. Неизолированная часть 158b может быть расположена между двумя переводниками 162a и 162b зазора внутри бурового снаряда 152. Зависимый от времени ток 164 может быть подан с помощью каротажного кабеля 158 в формацию 166, где он принимается обсадной трубой 168 внутри целевой скважины 170. Ток на обсадной трубе 168 может возбуждать в формации электромагнитное поле 172, градиент которого может быть измерен парой 156 датчиков в добавочном корпусе 154 для датчиков. Ток 172 может быть возвращен с использованием электрода 174, расположенного на поверхности.
Фиг. 2 иллюстрирует пример второй части бурового снаряда, добавочный корпус 200 для датчиков. Добавочный корпус 200 для датчиков может быть связан с первой частью, такой как сегменты бурильной колонны или BHA, посредством резьбовых соединений 212 и 213. Добавочный корпус 200 для датчиков, кроме того, может быть объединен с BHA с использованием резьбовых соединений. Добавочный корпус 200 для датчиков может содержать множество лопаток, в том числе, лопатки 201 и 202. Как показано, лопатки 201 и 202 могут быть диаметрально противоположны относительно продольной оси 280 добавочного корпуса 200 для датчиков. Пара датчиков, включающая датчики 205 и 206, может быть по меньшей мере частично расположена внутри лопаток 201 и 202, соответственно, вблизи наружных радиальных поверхностей добавочного корпуса 200 для датчиков. Как показано, наружные радиальные поверхности добавочного корпуса для датчиков могут содержать поверхности 216 и 217 лопаток 201 и 202. Наружная радиальная поверхность добавочного корпуса 200 для датчиков может относиться совместно к поверхностям всех лопаток добавочного корпуса 200 для датчиков или может относиться к отдельным поверхностям конкретных лопаток по отдельности.
В некоторых вариантах осуществления множество лопаток могут быть концентрическими в диаметре, а радиальное положение датчиков может быть идентичным с целью калибровки системы. Однако фактическое смещение от продольной оси какой-либо пары датчиков не должно быть одинаковым, при условии, что разделение учитывалось, как будет описано ниже. Соответственно, в некоторых вариантах осуществления форма добавочного корпуса для датчиков может быть эксцентрической по характеру, такому как лопатки на эксцентрическом буровом долоте.
Пара 205 и 206 датчиков может быть по меньшей мере частично расположена в углубленных участках 214 и 215 соответствующих лопаток. Кроме того, печатные платы 207 и 208 также могут быть расположены в углубленных участках 214 и 215 и могут обеспечивать энергию и канал связи к паре 205 и 206 датчиков или от нее с помощью проводов 209, 210 и 211. Поверхности 216 и 217 могут содержать съемные крышки 203 и 204 соответственно, которые могут по меньшей мере частично закрывать углубленные участки 214 и 215. Пары 205 и 206 датчиков могут включать в себя датчики индукционного типа с ферромагнитным сердечником, таким как мю-металл (ламинированные листы или сплошной), железо (ламинированные листы или сплошной) или ферритовый сердечник, все из которых могут быть снабжены проволочной обмоткой. В других вариантах осуществления датчики могут включать в себя датчики на эффекте Холла или виды магнитометров. Пары 205 и 206 датчиков могут по меньшей мере частично выступать через съемные крышки 203 204, открывая сердечники воздействию окружающего электромагнитного поля EM.
С целью определения ориентации датчиков 205 и 206 относительно направления вниз, в блок датчиков может быть включен датчик гравитационного поля, такой как акселерометр 250, так что ориентация датчиков 205 и 206 относительно направления вниз может быть определена и привязана к геометрическим размерам опорной скважины, благодаря использованию хорошо известных инклинометрических расчетов, таких как наклон и верхняя сторона относительно скважины. Компоновки датчика гравитационного поля могут иметь несколько вариантов, таких как акселерометры с 2 взаимно перпендикулярными осями или акселерометры с 3 перпендикулярными осями, с осями X и Y, являющимися осями поперечных направлений, и осью Z, направленной вдоль длинной оси прибора в скважине.
Для дополнительного увеличения величины магнитного потока, принимаемого датчиками 205 и 206, съемные крышки 203 и 204 по меньшей мере частично могут быть выполненными из материала с высокой магнитной проницаемостью, такого как сплав стали, мю-металл и др. Данный материал может обеспечить вывод магнитного потока через съемные крышки 203 и 204 и аккумулирование его в датчиках 205 и 206. В некоторых вариантах осуществления съемные крышки 203 и 204 могут полностью выполняться из материалов с высокой магнитной проницаемостью, таких как сплав стали или мю-металл. В случае, когда воспринимающая ось выровнена параллельно поверхностям съемных крышек 203 и 204, лопатки могут быть оборудованы материалом с высокой магнитной проницаемостью, таким как сталь, с целью накопления магнитного потока вдоль данного направления. В некоторых других вариантах осуществления, например, когда датчики 205 и 206 содержат магнитометры, весь добавочный корпус 200 для датчиков может быть выполнен из немагнитного сплава, такого как монель или аустенитная нержавеющая сталь, имеющего весьма низкую относительную магнитную проницаемость, около 1,02 или меньше, чтобы не допустить экранирования магнитного поля, создаваемого заданным током возбуждения.
На фиг. 3 проиллюстрирован поперечный разрез добавочного корпуса 300 для датчиков с конфигурацией, аналогичной добавочному корпусу 200 для датчиков. Как видно, добавочный корпус 300 для датчиков содержит четыре лопатки 301-304. Хотя добавочный корпус 300 для датчиков имеет четыре лопатки, возможны другие конфигурации, включая, помимо прочего, различное количество лопаток и лопатку с различными конфигурациями, такой как спиральная. Как показано, каждая из лопаток 301-304 может иметь соответствующие датчики 313-316, расположенные в углубленных участках 305-308, которые по меньшей мере частично закрыты съемными крышками 309-312. По меньшей мере одна из лопаток может включать в себя акселерометр 380. Пары датчиков могут включать в себя датчики 314 и 316, и датчики 313 и 315, которые диаметрально противоположны, для увеличения расстояния между ними. Добавочный корпус 300 для датчиков может иметь диаметр D, который может отличаться расстоянием между наружными радиальными поверхностями диаметрально противоположных лопаток 302 и 304. Кроме того, каждый из датчиков 331-316 электромагнитного поля может иметь соответствующую продольную ось 352-358. В показанном варианте осуществления продольные оси 352-358 могут быть перпендикулярны к продольной оси 350 добавочного корпуса 300 для датчиков.
Как показано на фиг. 2 и фиг. 3, пары датчиков могут быть расположены в плоскости x/y, которая перпендикулярна продольной оси 350 добавочного корпуса 300 для датчиков. Как указано выше, точность измерения градиента может зависеть от расстояния между двумя датчиками в паре датчиков, включая расстояние между датчиками 313 и 315 и расстояние между датчиками 314 и 316. Хотя пары датчиков могут быть расположены той же самой горизонтальной плоскости оси, как на фиг. 3, возможно определенное разделение в осевом направлении. Однако, как правило, если угол приближения к плановой скважине далеко недостаточен, при приближении к плановой скважине осевое смещение пары датчиков может создавать проблемы с измерением градиента.
Согласно аспектам настоящего изобретения расстояние между двумя датчиками в паре датчиков в плоскости x/y может быть увеличено до пределов соответствующего ствола скважины, таким образом, доводя до максимума точность градиента. Например, на фиг. 3, поскольку пара 313 и 315 датчиков расположена вблизи наружной радиальной поверхности добавочного корпуса 300 для датчиков, в лопатках 301 и 303 расстояние между двумя датчиками в паре датчиков вдоль оси x доведено до максимума. Аналогично, поскольку пара 314 и 316 датчиков расположена вблизи наружной радиальной поверхности добавочного корпуса 300 для датчиков, в лопатках 302 и 304 расстояние между двумя датчиками в паре датчиков вдоль оси y доведено до максимума.
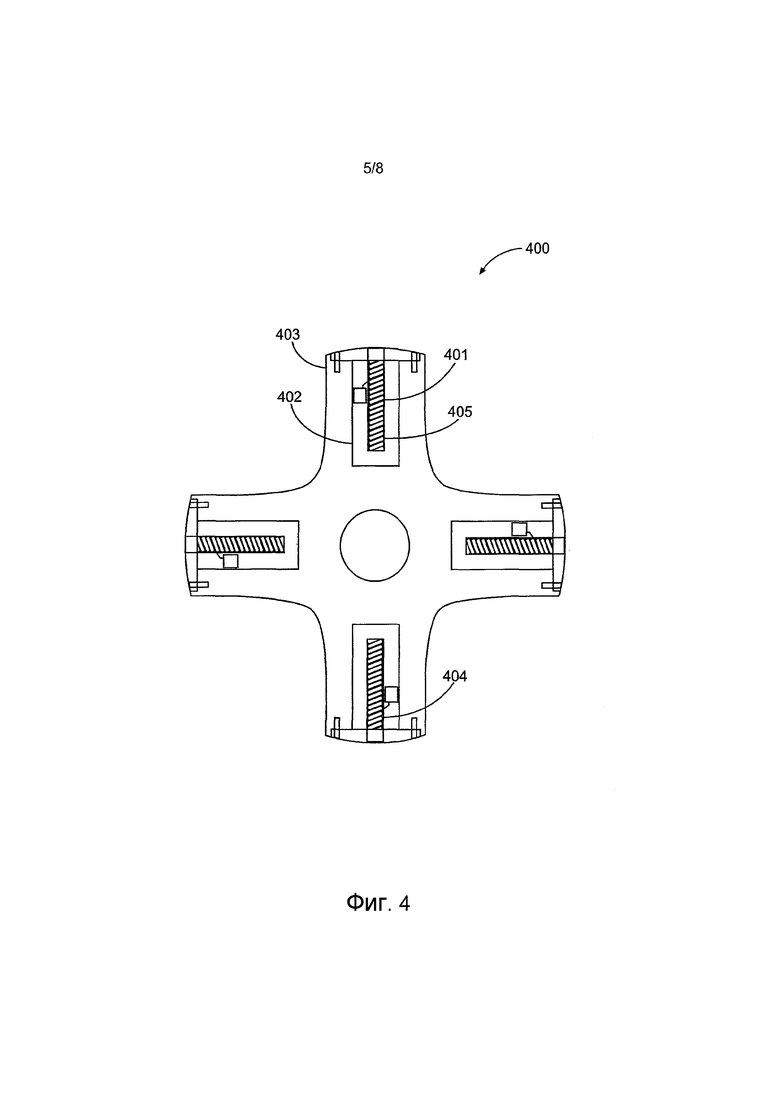
На фиг. 4 и 5 показан пример добавочных корпусов для четырех датчиков с дополнительными конфигурациями датчиков индукционного типа согласно аспектам настоящего изобретения. Как показано на фиг. 4, добавочный корпус 400 для датчиков может включать конфигурацию из четырех лопаток, аналогично добавочным корпусам для датчиков, описанным выше. Как показано, добавочный корпус для датчиков может содержать по меньшей мере одну пару 401 и 404 датчиков. Датчик 401 может быть расположен в углубленном участке 402 лопаток 403. В показанном варианте осуществления сердечник 405 индукционного датчика 401 может быть удлиненным, что может увеличивать величину магнитного потока, аккумулируемого датчиком. Следует заметить, что сердечник датчика 401 может быть удлинен вдоль той же оси, что и парный датчик 404 на диаметрально противоположной стороне добавочного корпуса 400 для датчиков. На фиг. 5 ориентация датчиков изменена относительно продольной оси 550 добавочного корпуса 500 для датчиков. Например, датчик 501 индукционного типа может быть повернут на 90° относительно конфигурации, показанной на фиг. 4, так что продольная ось датчика 501 не пересекается с продольной осью 550 добавочного корпуса 500 для датчиков. Следует заметить, что датчик 501 все еще может быть по меньшей мере частично расположен в углубленном участке 502 лопатки 504, так что он находится вблизи наружной поверхности лопатки 504. Кроме того, датчик 501 может еще образовывать пару датчиков с датчиком 505 и может включать в себя электронный модуль 503.
На фиг. 6A и 6B показан другой пример варианта осуществления добавочного корпуса 600 для датчиков. Как показано, добавочный корпус 600 для датчиков может включать в себя наружную радиальную поверхность, образованную множеством лопаток. Как показано, наружная радиальная поверхность включает в себя диаметр ΔD, который включает в себя расстояние между наружными поверхностями двух диаметрально противоположных лопаток, и в одинаковой степени применим к каждой паре диаметрально противоположных лопаток. По меньшей мере одна пара датчиков может быть расположена в добавочном корпусе 600 для датчиков. В показанном варианте осуществления добавочный корпус 600 для датчиков содержит восемь отдельных датчиков x1, x2, y1, y2, xy1, xy2, xy3 и xy4, расположенных по одному в каждой из восьми лопаток, образуя четыре пары датчиков. Пары датчиков могут включать в себя x1 и x2, y1 и y2, xy1 и xy2, и xy3 и xy4. Как показано, расстояние между каждой из пар датчиков может быть ΔD, учитывая их положение на диаметрально противоположных лопатках. Следует заметить, что измерения градиента на каждой паре датчиков могут быть определены следующим образом:
x1 и x2 = (Hx1 - Hx2)/ΔD;
y1 и y2 = (Hy1 - Hy2)/ΔD;
xy1 и xy2 = (Hxy1 - Hxy2)/ΔD;
xy3 и xy4 = (Hxy3 - Hxy4)/ΔD.
Следует заметить, что конечное измерение градиента может включать в себя определенный расчет усредненных отдельных значений градиента. Как должно быть понятно специалисту при рассмотрении настоящего изобретения, описанные выше формулы в равной степени применимы, когда расстояния между различными парами датчиков не равны. Конкретно, при условии, что расстояние между двумя датчиками в паре датчиков известно, для определения соответствующей величины градиента значение ΔD может быть изменено.
В некоторых вариантах осуществления блок управления или вычислительный элемент может быть связан с парами датчиков и может содержать процессор и запоминающее устройство. Запоминающее устройство может содержать ряд команд, которые при выполнении на запоминающем устройстве предписывают процессору принимать данные измерений от каждой пары датчиков и определять величину градиента. Команда может предписывать процессору обрабатывать данные измерений с использованием описанных выше уравнений, или уравнений, аналогичных описанным. В некоторых вариантах осуществления запоминающее устройство может содержать сохраненные данные, такие как расстояние между датчиками каждой пары датчиков, которые могут быть использованы для определения измерений градиента. Измерения градиента могут определять местоположение цели в формации. В некоторых вариантах осуществления блок управления или вычислительный элемент может передавать данные измерений градиента в систему управления курсом, которая может автоматически корректировать направление бурения бурового снаряда для пересечения, следования или обхода цели.
На фиг. 7 показан другой пример добавочного корпуса 700 для датчиков согласно аспектам настоящего изобретения. Как показано, добавочный корпус 700 для датчиков может иметь наружную радиальную поверхность 702, образованную кольцевой поверхностью, а не наружной поверхностью лопаток. Как показано, добавочный корпус 700 для датчиков может содержать множество клиньев 703a-d (703d не показано) в пределах наружной радиальной поверхности, в которой могут быть расположены датчики 706. Добавочный корпус 700 для датчиков может также содержать по меньшей мере одну пару датчиков и еще создавать промежутки 704, через которые может проходить направленный вверх поток бурового раствора.
Таким образом, настоящее изобретение хорошо подходит для достижения указанных целей и преимуществ, а также тех, которые являются неотъемлемыми. Конкретные варианты осуществления, описанные выше, являются только иллюстративными, так как настоящее изобретение может быть модифицировано и осуществлено различными, но эквивалентными способами, что понятно специалистам в данной области, для которых очевидны преимущества настоящего изобретения. Кроме того, никакие ограничения не предназначены для деталей конструкции или плана, показанных здесь, иным образом, чем описано в приведенной ниже формуле изобретения. Поэтому очевидно, что отдельные иллюстративные варианты осуществления, раскрытые выше, могут быть изменены или модифицированы, и все такие изменения рассматриваются в рамках объема и сущности настоящего изобретения. Кроме того, термины в формуле изобретения имеют простое, обычное значение, если патентовладельцем явно и недвусмысленно не определено иное. Определения, имеющие единственное число и используемые в формуле изобретения, определены в настоящем документе как означающие «один или больше чем один» вводимый элемент.







Система, способ и бурильное устройство предназначены для проведения операций дальнометрии и используются в области разработки и для добычи полезных ископаемых. Достигаемый результат - повышение точности операций дальнометрии. Система содержит первую скважину, имеющую буровой снаряд с бурильной колонной и целевую скважину, удаленную от первой скважины. Бурильная колонна имеет первый диаметр и вторую часть с добавочным корпусом, имеющим диаметр, который больше, чем первый диаметр. Множество датчиков, составляющих пары датчиков, расположены во второй части вблизи наружной радиальной поверхности второй части, в плоскости x/y, которая перпендикулярна продольной оси добавочного корпуса. Добавочный корпус для датчиков содержит множество лопаток. Каждая лопатка содержит один датчик, расположенный в ней вблизи наружной радиальной поверхности лопатки. Процессор имеет сообщение с бурильным устройством, причем процессор определяет расстояние и направление до целевой скважины по меньшей мере на основе одного измерения градиента на основании по меньшей мере частично выходных данных пары датчиков. 3 н. и 15 з.п. ф-лы, 9 ил.
1. Система для проведения операций дальнометрии, содержащая:
первую скважину, имеющую буровой снаряд, включающий в себя бурильную колонну и вторую часть, причем бурильная колонна имеет первый диаметр, а вторая часть имеет второй диаметр, который больше, чем первый диаметр;
пару датчиков, расположенных во второй части вблизи наружной радиальной поверхности второй части, причем вторая часть содержит добавочный корпус для датчиков, при этом пара датчиков расположена в плоскости x/y, которая перпендикулярна продольной оси добавочного корпуса;
целевую скважину, удаленную от первой скважины;
процессор, имеющий сообщение с бурильным устройством, причем процессор определяет расстояние и направление до целевой скважины по меньшей мере на основе одного измерения градиента на основании по меньшей мере частично выходных данных пары датчиков.
2. Система по п. 1, в которой добавочный корпус для датчиков содержит первую лопатку и вторую лопатку.
3. Система по п. 2, в которой первый датчик из пары датчиков расположен в первой лопатке, а второй датчик из пары датчиков расположен во второй лопатке.
4. Система по п. 3, в которой поверхность первой лопатки содержит съемную крышку.
5. Система по п. 4, в которой съемная крышка по меньшей мере частично выполнена из мю-металла.
6. Система по п. 3, в которой первая лопатка и вторая лопатка диаметрально противоположны относительно продольной оси добавочного корпуса для датчиков.
7. Система по любому из предшествующих пунктов, в которой пара датчиков включают в себя комбинацию датчика индукционного типа, магнитометрического датчика на эффекте Холла и магнитного градиентометра.
8. Способ проведения операций дальнометрии, содержащий:
расположение бурильного устройства в стволе первой скважины, причем: бурильное устройство содержит бурильную колонну и вторую часть, и бурильная колонна имеет первый диаметр, а вторая часть имеет второй диаметр, который больше первого диаметра, причем вторая часть содержит добавочный корпус для датчиков, при этом пара датчиков расположена в плоскости x/y, которая перпендикулярна продольной оси добавочного корпуса;
обеспечение целевой скважины, удаленной от первой скважины;
прием данных измерений от пары датчиков, расположенных во второй части бурильного устройства вблизи наружной радиальной поверхности второй части;
определение расстояния и до целевой скважины на основе измерения градиента в процессоре, имеющем сообщение с бурильным устройством, причем измерение градиента основано по меньшей мере частично на выходных данных от пары датчиков.
9. Способ по п. 8, в котором добавочный корпус для датчиков содержит первую лопатку и вторую лопатку.
10. Способ по п. 9, в котором первый датчик из пары датчиков расположен в первой лопатке, а второй датчик из пары датчиков расположен во второй лопатке.
11. Способ по п. 10, в котором поверхность указанной первой лопатки содержит съемную крышку.
12. Способ по п. 11, в котором съемная крышка по меньшей мере частично выполнена из мю-металла.
13. Способ по любому из пп. 11 и 12, в котором первая лопатка и вторая лопатка диаметрально противоположны относительно продольной оси добавочного корпуса для датчиков.
14. Способ по любому из пп. 10 - 12, в котором пара датчика включает в себя комбинацию датчика индукционного типа, магнитометрического датчика на эффекте Холла и магнитного градиентометра.
15. Способ по п. 14, в котором вторая часть выполнена из немагнитного сплава стали.
16. Бурильное устройство для проведения операций дальнометрии, содержащее:
бурильную колонну, расположенную в первой скважине;
добавочный корпус для датчиков, связанный с бурильной колонной, причем добавочный корпус для датчиков содержит множество лопаток;
множество датчиков, составляющих пары датчиков, причем каждая лопатка содержит один датчик, расположенный в ней вблизи наружной радиальной поверхности лопатки, при этом пара датчиков расположена в плоскости x/y, которая перпендикулярна продольной оси добавочного корпуса; и
процессор, имеющий сообщение с множеством датчиков, причем процессор определяет расстояния и направление до целевой скважины, удаленной от первой скважины на основе по меньшей мере одного измерения градиента на основании по меньшей мере частично выходных данных указанных пар датчиков.
17. Бурильное устройство по п. 16, в котором каждая из множества лопаток имеет соответствующую лопатку, которая диаметрально противоположна относительно продольной оси добавочного корпуса для датчиков.
18. Бурильное устройство по п. 16 или 17, в котором каждая пара датчиков включает в себя комбинацию датчика индукционного типа, магнитометрического датчика на эффекте Холла и магнитного градиентометра.
| US 4933640 A, 12.06.1990 | |||
| БЕСПРОВОДНАЯ ЭЛЕКТРОМАГНИТНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА, ЗАБОЙНЫЙ УЗЕЛ И СПОСОБ ТРАНСЛЯЦИИ СИГНАЛА ЧЕРЕЗ НЕГО | 2006 |
|
RU2439319C2 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ МЕСТА ПРИХВАТА БУРИЛЬНЫХ ИЛИ ОБСАДНЫХ ТРУБ | 0 |
|
SU275926A1 |
| СКВАЖИННЫЙ ИНСТРУМЕНТ И СПОСОБ ДЛЯ СБОРА ДАННЫХ О ПОДЗЕМНОМ ПЛАСТЕ | 2002 |
|
RU2319005C2 |
| WO 2007143384 A2, 13.12.2007 | |||
| US 2012199400 A1, 09.08.2012 | |||
| US2011226531A1,22.09.2011 | |||
| Кононов В.В | |||
| Некоторые вопросы оптимизации магнитометрического метода контроля напряженно-деформированного состояния подземного стального трубопровода, электронный научный журнал "Нефтегазовое дело", 2012, N6, УДК 620.179.14, с.163-165, с.170, математическая зависимость (9), с.172, фиг.7), найдено в интернете по адресу: http://www.ogbus.ru. | |||

