ПРИОРИТЕТ
Настоящей заявкой заявлен приоритет по предварительной заявке на патент США № 61/884,688 с названием "СКВАЖИННАЯ ГРАДИОМЕТРИЧЕСКАЯ ДАЛЬНОМЕТРИЯ С ИСПОЛЬЗОВАНИЕМ ПЕРЕДАТЧИКОВ И ПРИЕМНИКОВ, ИМЕЮЩИХ МАГНИТНЫЕ ДИПОЛИ" от 30.09.2013, в которой также указаны в качестве изобретателей Donderici и др, а также полное содержание которой полностью включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
В общем, настоящее изобретение относится к скважинной дальнометрии и, в частности, к дальнометрическому узлу, использующему передатчики и приемники с магнитными диполями, которые анализируют градиентометрические данные для определения и отслеживания относительного местоположения множественных стволов скважин.
УРОВЕНЬ ТЕХНИКИ
Определение положения и направления проводящей трубы (например, металлической обсадной колонны) точным и эффективным образом требуется в различных скважинных применениях. Возможно, наиболее важным из этих применений является случай фонтанирующей скважины, в которой целевая скважина должна быть очень точно пересечена разгрузочной скважиной для того, чтобы остановить фонтанирование. Другое важное применение содержит бурение скважины, параллельной существующей скважине в системах по технологии парогравитационного дренажа (SAGD, Steam Assisted Gravity Drainage), избегая столкновений с другими скважинами в насыщенном нефтяном месторождении, где скважины бурят в непосредственной близости друг к другу, и отслеживая подземные траектории бурения, используя существующую внедренную металлическую трубу по земле, как ориентир.
Для предоставления решения этой проблемы было предпринято несколько попыток обычного подхода. В соответствии с одним способом в целевой обсадной колонне индуцируют ток посредством передачи электромагнитных волн через катушечные антенны. Индуцированный ток в свою очередь вызывает испускание обсадной колонной вторичного электромагнитного поля. Амплитуду этого вторичного поля можно использовать для определения расстояния до целевой обсадной колонны. Однако, поскольку амплитуда этого поля сильно зависит от свойств обсадной колонны и формации, точность этого способа может оставаться низкой.
В соответствии с другим обычным подходом для индуцирования тока в целевой обсадной колонне используют источник электродного типа для генерации таким образом магнитного поля. В соответствии с этим подходом измеряют градиент магнитного поля, испускаемого целевой обсадной колонной, в дополнение к самому этому магнитному полю. Посредством использования отношения между магнитным полем и его градиентом выполняют точные дальнометрические измерения. Однако, поскольку электроды восприимчивы к буровым растворам на углеводородной основе, для ввода тока электрод должен быть расположен в прямом контакте с формацией. В результате могут возникать высокие потери при контакте, или омические потери в высокорезистивных формациях могут уменьшать дальность этого приспособления.
Следовательно, в области техники существует потребность в улучшенных технологиях скважинной дальнометрии.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
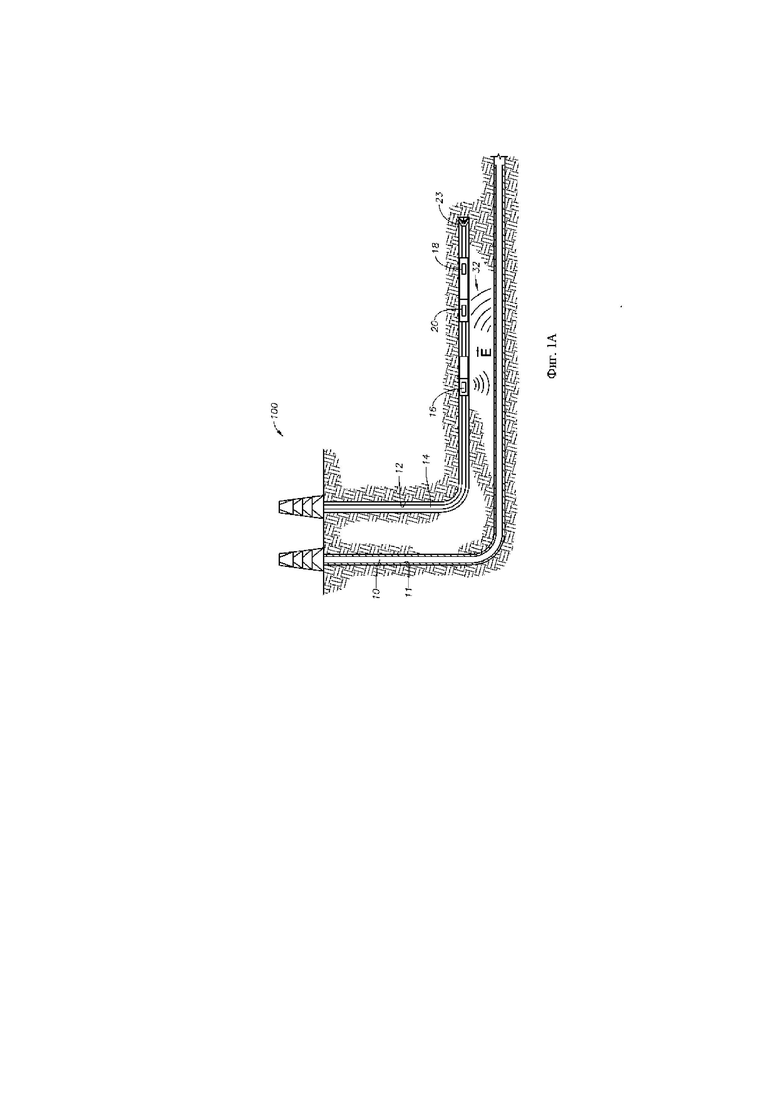
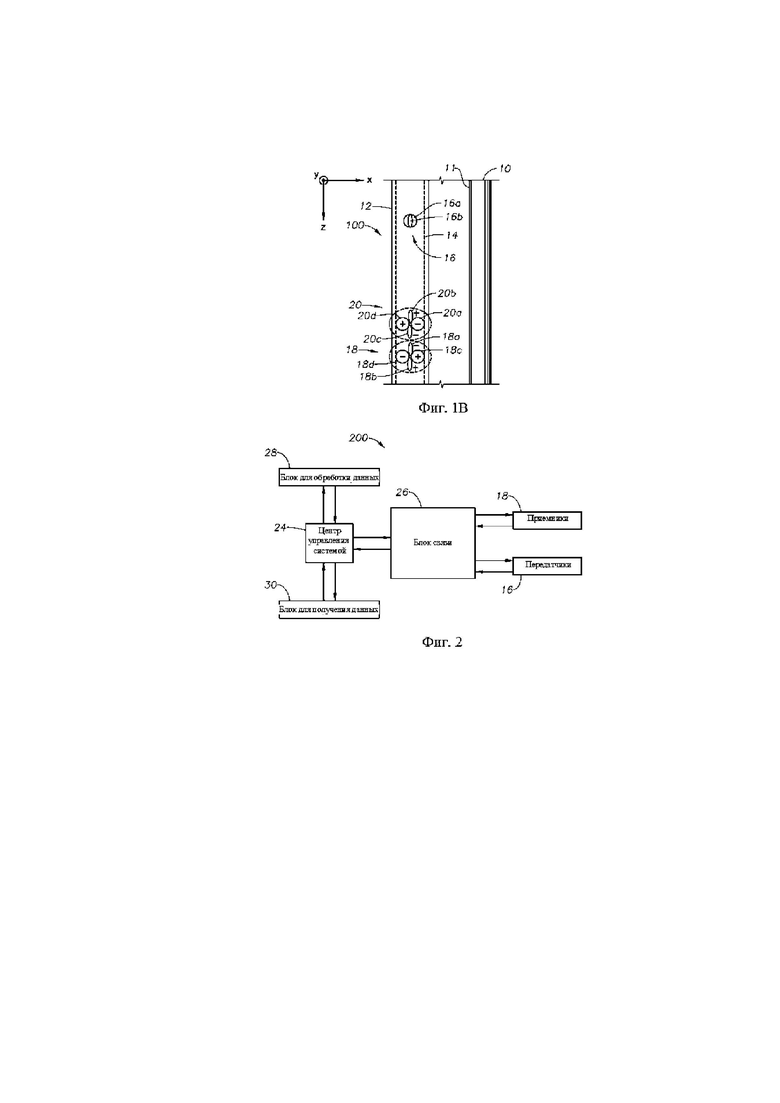
На фиг. 1А и 1В иллюстрирована система относительного позиционирования в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения;
на фиг. 2 показана структурная схема обрабатывающих схем, использованных в системе относительного позиционирования, в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения;
на фиг. 3 иллюстрирован упрощенный иллюстративный вариант осуществления системы относительного позиционирования, использованной для описания методологии настоящего изобретения;
на фиг. 4 иллюстрирована конфигурация приемника с магнитными диполями, подходящего для устранения слепых пятен, в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения;
на фиг. 5 иллюстрирована упрощенная геометрия моделированной системы относительного позиционирования в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения;
на фиг. 6 показан график, вычерчивающий измеренное расстояние, как функцию реального расстояния этого приспособления от цели, полученное на основании моделирования иллюстративных вариантов осуществления настоящего изобретения;
на фиг. 7 иллюстрирована траектория разгрузочной скважины, пробуренной для пересечения фонтанирующей скважины, в соответствии с иллюстративными методологиями настоящего изобретения;
на фиг. 8 начерчен график вычисленного расстояния от разгрузочной скважины до фонтанирующей скважины в сравнении с реальным расстоянием для градиентных измерений в различных направлениях в соответствии с иллюстративными методологиями настоящего изобретения;
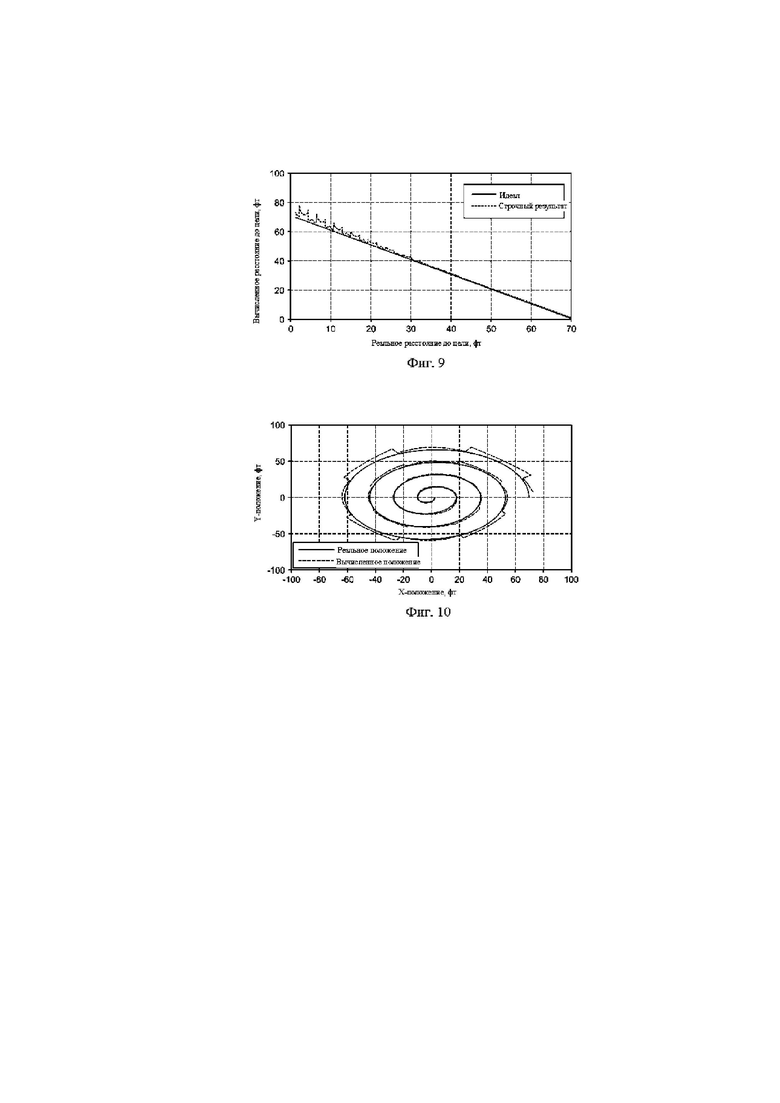
на фиг. 9 начерчен график расстояния до цели, являющегося результатом четырех градиентных измерений, показанных на фиг. 8;
на фиг. 10 начерчена реальная траектория разгрузочной скважины в сравнении с вычисленной траекторией для иллюстративной методологии пересечения скважины согласно настоящего изобретения; и
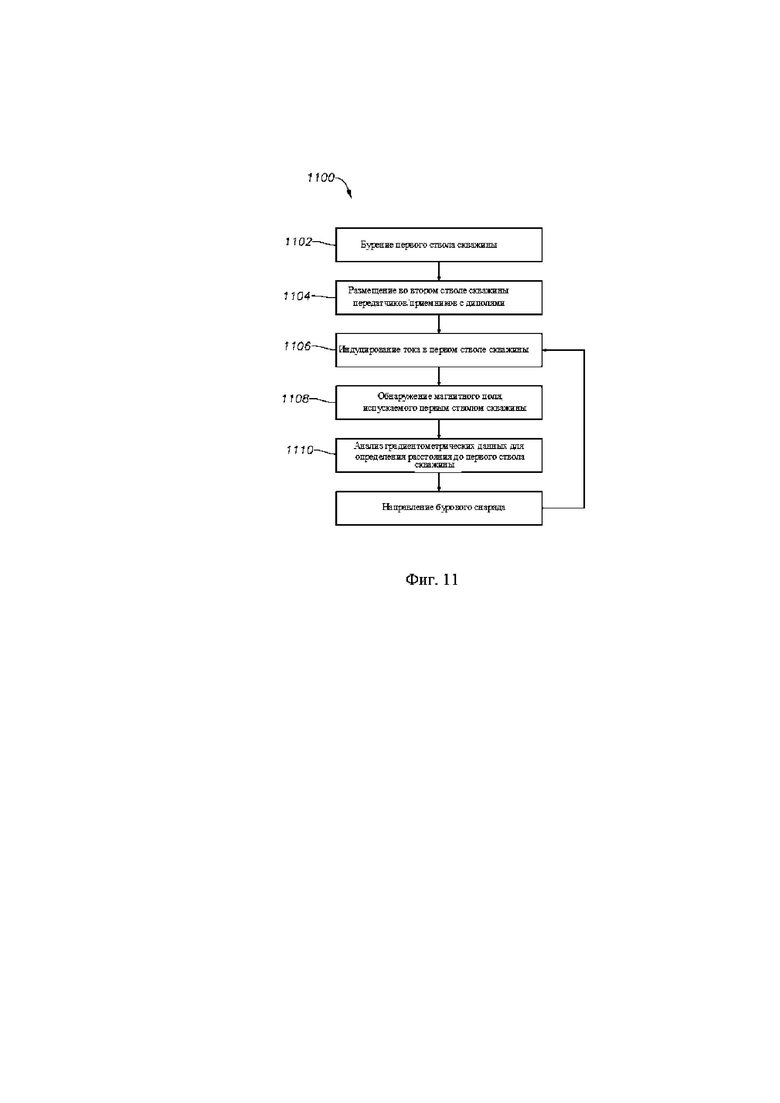
на фиг. 11 показана блок-схема способа дальнометрии, применяемой посредством системы относительного позиционирования для определения расстояния между первым (т.е. целью) и вторым стволом скважины в соответствии с некоторыми иллюстративными методологиями настоящего изобретения.
ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Иллюстративные варианты осуществления и связанные методологии настоящего изобретения описаны ниже, как они могут быть применены в системе и способе дальнометрии с использованием передатчиков/приемников с магнитными диполями для анализа градиентометрических данных и, таким образом, бурения или отслеживания относительного местоположения стволов скважин. В интересах ясности в этой спецификации описаны не все признаки фактической реализации или методологии. Разумеется, следует понимать, что при конструировании любого такого фактического варианта осуществления для достижения конкретных задач конструкторов, таких как соблюдения ограничений, относящихся к системе и бизнесу, которые будут отличаться от одной реализации к другой, должны быть выполнены многочисленные реализации конкретных решений. Кроме того, следует понимать, что такие конструкторские работы могут быть сложными и времязатратными, но тем не менее они будут рутинным делом для специалистов в данной области техники, имеющих преимущество настоящего изобретения. Дополнительные аспекты и преимущества различных вариантов осуществления и связанных методологий настоящего изобретения будут понятны при рассмотрении нижеследующего описания и чертежей.
Как описано в настоящем документе, иллюстративные варианты осуществления и методологии настоящего изобретения описывают системы дальнометрии, которые используют градиентометрические данные для определения расстояния между первой и второй скважиной без каких-либо знаний о характеристиках скважины или формации или без их привлечения, причем градиентное поле измеряют в радиальном направлении вдоль скважинного оборудования. В целом, это может быть достигнуто посредством размещения скважинного оборудования, содержащего передатчики и приемники с магнитными диполями вместе с противодействующими приемниками, расположенными между указанными передатчиками и приемниками. Магнитные диполи могут быть воплощены различными способами, включая, например, катушки, соленоиды или магнитометры. Электромагнитное поле генерируют посредством передатчиков и индуцируют на целевую обсадную колонну для создания таким образом вторичного электромагнитного поля по этой обсадной колонне. Сумма этого вторичного магнитного поля в дополнение к прямому полю, поступающему от передатчика, измеряют посредством комплекта приемников, разделенных радиально по оси указанного скважинного оборудования. Противодействующие приемники выполнены с возможностью наличия противоположной поляризации по отношению к основному комплекту приемников для устранения таким образом прямого сигнала между указанными передатчиком и приемником. Используя измерения магнитного поля от различных приемников в комплекте приемников, вычисляют градиент магнитного поля. После чего, используя различные алгоритмы, описанные в настоящем документе, обрабатывающие схемы, расположенные в скважинном оборудовании (или в удаленном местоположении), анализируют градиентное поле для определения расстояния и направления до целевой обсадной колонны.
Хотя настоящее изобретение может быть применено для различных применений, нижеследующее описание сфокусируется на применениях для точного и надежного позиционирования пробуриваемой скважины, "нагнетательной" скважины (т.е. второй скважины) по отношению к близлежащей целевой первой скважине, обычно добывающей скважине, таким образом, что нагнетательную скважину могут поддерживать приблизительно параллельно добывающей скважине. Целевая скважина должна иметь более высокую проводимость, чем окружающая формация, что может быть реализовано посредством использования удлиненного проводящего корпуса вдоль целевой скважины, такого как, например, обсадная колонна, которая уже наличествует в большинстве скважин для сохранения целостности скважины. Кроме того, способ и система в соответствии с настоящим изобретением особенно потребуются для бурения SAGD скважин, поскольку две скважины могут бурить близко друг к другу, как требуется при SAGD работах. Эти и другие применения и/или приспособления будут понятны специалистам в данной области техники на основании преимущества настоящего изобретения.
На фиг. 1А и 1В иллюстрирована система 100 относительного позиционирования в соответствии с примерным вариантом осуществления настоящего изобретения. В соответствии с этим вариантом осуществления добывающую скважину 10 бурят с использованием любой подходящей бурильной технологии. Далее, добывающую скважину 10 обсаживают обсадной колонной 11. Затем нагнетательную скважину 12 бурят, используя буровой снаряд 14, который может быть, например, "LWD" (logging-while drilling, каротаж в процессе бурения) снарядом, "MWD" (measurement-while drilling, измерение в процессе бурения) снарядом или другим требуемым буровым снарядом, имеющим долото 23 на своем дальнем конце. Хотя нагнетательная скважина описана, как пробуриваемая позднее, в соответствии с другими вариантами осуществления добывающую скважину 10 и нагнетательную скважину 12 могут бурить одновременно.
В соответствии с этим примерным вариантом осуществления буровой снаряд 14 содержит компоновку низа бурильной колонны, имеющую один или большее количество передатчиков 16 с магнитными диполями и один или большее количество приемников 18 с магнитными диполями. В соответствии с этими вариантами осуществления, применяющими два передатчика 16, указанные передатчики расположены в непараллельных направлениях (например, ортогональных направлениях) по отношению друг к другу таким образом, что переданные поля могут быть разъединены в двух ортогональных направлениях для того, чтобы получать измерение азимутального угла добывающей скважины 10. Для того чтобы упростить процесс разъединения, передатчики могут быть расположены в ортогональном отношении друг к другу. В нижеследующем описании передатчики и приемники могут называться как ортогонально расположенные относительно друг друга; однако, в соответствии с альтернативными вариантами осуществления передатчики/приемники могут быть расположены в другой непараллельной ориентации относительно друг друга. Как показано на фиг. 1В, буровой снаряд 14 содержит передатчики 16а, b, расположенные ортогонально. Таким образом, в этом примере по меньшей мере четыре приемника 18а-d с магнитными диполями расположены вдоль бурового снаряда 14 для того, чтобы получать градиентные измерения. Приемники 18а-d радиально разделены вдоль бурового снаряда 14 таким образом, что можно измерять градиентное поле. В этом примере для того, чтобы устранять прямой сигнал от передатчиков 16, рядом с приемниками 18 расположены четыре противодействующих приемника 20.
Как будет более подробно описано ниже, во время примерных бурильных работ с использованием системы 100 относительного позиционирования буровой снаряд 14 размещают в забое скважины для бурения нагнетательной скважины 12 после бурения добывающей скважины 10 или одновременно с этим. Для того чтобы поддерживать нагнетательную скважину 12 на требуемом расстоянии от добывающей скважины 10, система 100 относительного позиционирования активирует передатчики 16, которые создают электрическое поле  , которое индуцирует ток в целевой обсадной колонне 11 добывающей скважины 10, что приводит к магнитному полю 32, испускаемому от целевой обсадной колонны 11. Затем радиально разделенные приемники 18 обнаруживают магнитное поле 32 и связанное градиентное поле. Потом локальные или удаленные обрабатывающие схемы используют градиентометрические данные принятого магнитного поля для определения расстояния и направления до добывающей скважины 10. После того, как относительное положение определено, указанные схемы генерируют сигналы, необходимые для направления бурового снаряда 14 в направлении, необходимом для поддерживания указанного требуемого расстояния и направления от добывающей скважины 10.
, которое индуцирует ток в целевой обсадной колонне 11 добывающей скважины 10, что приводит к магнитному полю 32, испускаемому от целевой обсадной колонны 11. Затем радиально разделенные приемники 18 обнаруживают магнитное поле 32 и связанное градиентное поле. Потом локальные или удаленные обрабатывающие схемы используют градиентометрические данные принятого магнитного поля для определения расстояния и направления до добывающей скважины 10. После того, как относительное положение определено, указанные схемы генерируют сигналы, необходимые для направления бурового снаряда 14 в направлении, необходимом для поддерживания указанного требуемого расстояния и направления от добывающей скважины 10.
На фиг. 2 показана структурная схема обрабатывающих схем 200, использованных в системе относительного позиционирования, в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения. Показан центр 24 управления системой, который управляет последовательностью операций. В соответствии с этим примером передатчики 16 состоят из двух катушек в ортогональных направлениях для получения измерений азимутального угла добывающей скважины 10. Однако в соответствии с другими вариантами осуществления передатчики/приемники могут быть реализованы, например, как соленоиды, магнитометры или различные другие реализации, которые сходны магнитным диполям. Следовательно, приемники 18 могут содержать по меньшей мере четыре катушечные антенны для градиентных измерений. Устранение прямого сигнала от передатчиков 16 до приемников 18 могут выполнять с использованием противодействующих катушек 20; в других случаях, устранение прямого сигнала могут выполнять, используя альтернативные технологии, такие как аналитические методы расчета этого эффекта. В соответствии с этими вариантами осуществления использование противодействующих приемников 20, передатчиков 18, показанных на фиг. 2, также будет содержать данные от противодействующих приемников 20.
Блок 26 связи облегчает взаимодействие между центром 24 управления системой и катушками 16 передатчиков и катушками 18 приемников. Блок визуализации (не показан) могут присоединять к блоку 26 связи для отслеживания данных; например, оператор может вмешиваться в работу системы на основании этих данных. Центр 24 управления системой также взаимодействует с одним или большим количеством блоков 28 для обработки данных и с одним или большим количеством блоков 30 для получения данных. Блок 28 для обработки данных может преобразовывать принятые данные в информацию, дающую положение и направление цели. После чего результаты могут отображать с помощью блока визуализации. Центр 24 управления системой может быть расположен на поверхности или в скважине, в этом случае обработанные данные передают на поверхность.
Как было упомянуто ранее, буровой снаряд 14 может содержать встроенные схемы помимо необходимых схем для обработки/хранения/связи для того, чтобы выполнять вычисления, описанные в настоящем документе. В соответствии с некоторыми вариантами осуществления изобретения эти схемы соединены с возможностью связи с одним или большим количеством передатчиков 16 с магнитными диполями, использованными для генерации электромагнитных полей, а также аналогичным образом соединены с приемниками 28 с магнитными диполями для обработки принятых электромагнитных волн 28. Кроме того, встроенные схемы бурового снаряда 14 могут быть соединены с возможностью связи с помощью проводных или беспроводных соединений с поверхностью для передачи таким образом данных обратно вверх по стволу скважины и/или на другие компоненты снаряда (для направления формирующих частей бурового долота снаряда 14, например). В соответствии с альтернативным вариантом осуществления изобретения схемы, необходимые для выполнения одного или большего количества аспектов технологий, описанных в настоящем документе, могут быть расположены в удаленном местоположении от бурового снаряда 14, таком как поверхность, или в другом стволе скважины. Например, в соответствии с некоторыми вариантами осуществления передатчик может быть расположен в другой скважине или на поверхности. Эти и другие вариации легко будут понятны специалистам в области техники, имеющих преимущество настоящего изобретения.
Хотя это не показано на фиг. 2, указанные встроенные схемы содержат по меньшей мере один процессор и некратковременное и читаемое с помощью компьютера запоминающее устройство, соединенные с помощью системной шины. Программные инструкции, выполняемые посредством этого процессора для реализации иллюстративных методологий относительного позиционирования, описанных в настоящем документе, могут храниться в локальном запоминающем устройстве или в некоторых других читаемых с помощью компьютера средах. Также будет понятно, что позиционирующие программные инструкции также могут быть загружены в это запоминающее устройство из компакт-диска или других подходящих запоминающих сред с помощью проводных или беспроводных способов.
Кроме того, специалистам в области техники будет понятно, что различные аспекты настоящего изобретения могут практиковаться с различными конфигурациями компьютерных систем, включая переносные устройства, мультипроцессорные системы, основанные на микропроцессорах или программируемые электронику, мини-компьютеры, центральные компьютеры и тому подобное. Любое количество компьютерных систем и компьютерных сетей допустимы для использования с настоящим изобретением. Настоящее изобретение могут практиковать в распределенной вычислительной среде, где задачи выполняют при помощи удаленных обрабатывающих устройств, которые соединены через сеть связи. В распределенной вычислительной среде программные модули могут быть расположены как на локальных, так и на удаленных компьютерных запоминающих средах, включая запоминающие устройства. Следовательно, настоящее изобретение может быть реализовано в связи с различным аппаратным обеспечением, программным обеспечением или их комбинации в компьютерной системе или другой обрабатывающей системе.
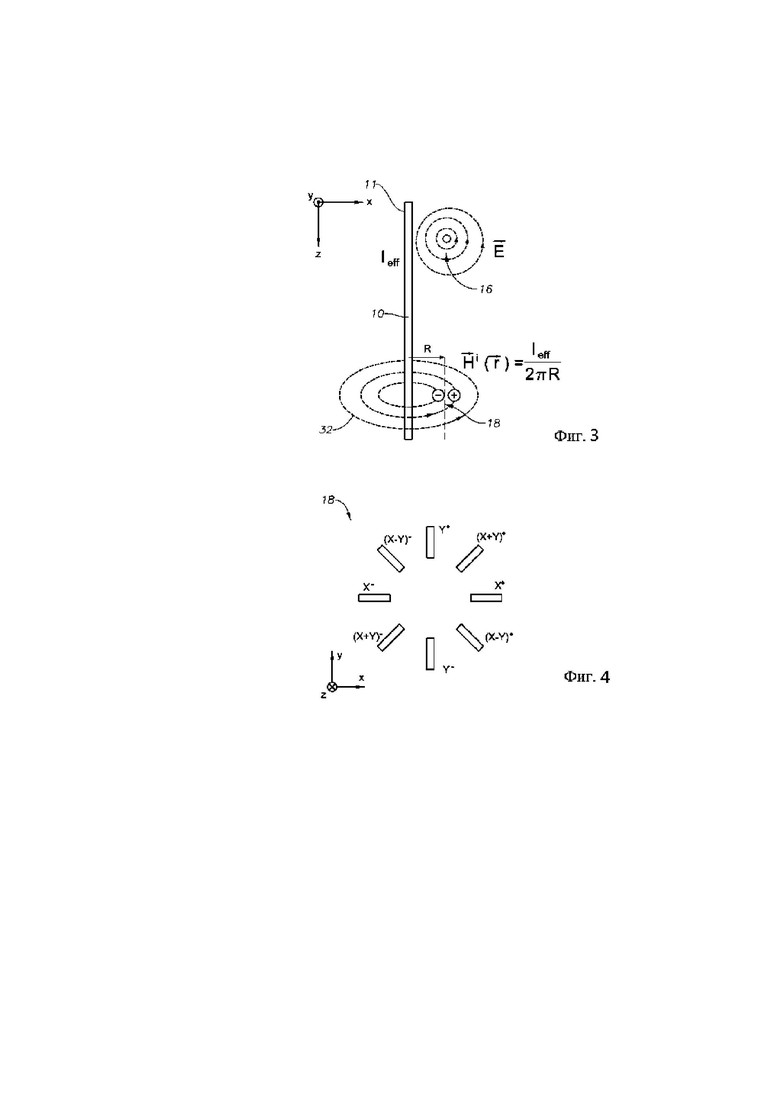
Теперь, после того, как были описаны различные варианты осуществления, будет описана методология, посредством которой определяют относительное позиционирование. На фиг. 3 иллюстрирован упрощенный иллюстративный вариант осуществления системы относительного позиционирования, которая будет использована для описания методологии настоящего изобретения. Для простоты здесь не показаны нагнетательная скважина 12 и буровой снаряд 14. Тем не менее, показано сечение однородной формации (кроме целевой скважины 10, передатчиков 16 и приемников 18) в плоскости x-z. В соответствии с этим примером передающая катушка 16 с магнитным моментом в направлении y (т.е. катушка, которая лежит в плоскости x-z) создает вокруг нее электрическое поле (). Также показана целевая скважина 10, чья основная ось находится в направлении z. Скважины для укрепления конструкции скважины и предотвращения разрушения стенок ствола скважины обычно имеют вокруг себя удлиненные металлические корпуса (такие как стальные обсадные колонны). Поскольку обсадная колонна является намного более проводящей, чем формация вокруг нее, происходит сильное взаимодействие электрического поля с целевой обсадной колонной.
Эта связь по электрическому полю создает ток проводимости в целевой обсадной колонне 11, который затем индуцирует магнитное поле 32 вокруг обсадной колонны 11, чье значение может быть найдено с помощью закона Био-Савара. Если ток индукции был постоянным, закон Био-Савара уменьшится до закона Ампера. На практике ток, индуцированный в обсадной колонне 11, не является постоянным, но для наших целей мы можем допускать, что поле в точке задано
с небольшой потерей точности, где H - магнитное поле, Ieff - эффективный ток, а R - радиальное расстояние от целевой скважины 10 до точки  .
.
Градиент магнитного поля в том же местоположении,  задан
задан
Возьмем отношение  к
к  радиальное расстояние до целевой скважины10 можно определить так
радиальное расстояние до целевой скважины10 можно определить так
Теперь будет описана иллюстративная конструкция приемников 18. Как описано в настоящем документе, приемники являются реализациями с магнитными диполями, такими как, например, катушки, соленоиды и т.д. В соответствии с одним вариантом осуществления используют катушечные антенны, имеющие магнитный момент в определенном направлении. В результате, катушки восприимчивы только к составляющей магнитного поля в этом направлении. Если это направление назовем u, составляющая магнитного поля в этом направлении может быть записана как
Аналогично, если две катушки приемника (с одинаковым магнитным моментом) радиально разделены на очень близком расстоянии в направлении v, их разность является очень хорошим приближением к составляющей градиента магнитного поля в этом направлении. Предполагая, что u и v являются двумя осями в в декартовой системе координат, градиент в направлении v можно записать так

В декартовых координатах  и
и  можно записать как
можно записать как
где - азимутальный угол приемника18 по отношению к обсадной колонне 11; то есть угол между проекцией вектора измеренного магнитного поля на плоскость x-y координатной системы приемника18 и осью y.
- азимутальный угол приемника18 по отношению к обсадной колонне 11; то есть угол между проекцией вектора измеренного магнитного поля на плоскость x-y координатной системы приемника18 и осью y.
Если катушки приемника имеют магнитные моменты в направлении y, и они радиально разделены в направлении x, как показано на фиг. 3, Уравнение 5 можно вычислять как

из которого можно сделать два наблюдения. Первое, градиент равен нулю, когдаравен 90°±n×180° ( ), что в случае, когда магнитное поле не имеет какой-либо y составляющей. Второе, когда/равен 45°±n×90° (
), что в случае, когда магнитное поле не имеет какой-либо y составляющей. Второе, когда/равен 45°±n×90° ( ), вычисление градиента “увеличивается”, предотвращая вычисление дальности для этого угла.
), вычисление градиента “увеличивается”, предотвращая вычисление дальности для этого угла.
Для того чтобы предотвратить слепые пятна, которые предполагаются Уравнением 7, иллюстративная конструкция приемника показана на фиг. 4, где изображена конфигурация приемника с магнитными диполями, пригодная для устранения слепых пятен, в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения. Как показано на фиг. 4, катушечные приемники 18 изображены в виде прямоугольников вокруг корпуса компоновки низа бурильной колонны (не показана) с иллюстративными целями. Приемники 18 называют в соответствии с направлением градиента. Например, градиент в направлении y могут находить посредством нахождения разности полей в радиально разделенных катушке Y+ и катушке Y-. Эта конфигурация позволит выполнять градиентные измерения с интервалами в 45°, исключая любые возможные слепые пятна.
Все еще ссылаясь на фиг. 4, можно видеть, как каждая пара приемников (Y+/Y-, X+/X- и т.д.) радиально разделена в направлении, которое поперечно (например, перпендикулярно) оси компоновки низа бурильной колонны (ось компоновки низа бурильной колонны находится вдоль направления z). Следовательно, во время бурильных работ магнитный момент каждой пары приемников остается ориентированным в направлении, поперечном как оси компоновки низа бурильной колонны, так и направлению радиального разделения указанных пар приемников. В результате можно измерить градиент магнитного поля 32.
Как было описано ранее, в соответствии с некоторыми вариантами осуществления противодействующие приемники 20 используют для устранения прямого сигнала от передатчиков 16. Противодействующие приемники 20 также являются реализациями с магнитными диполями, такими как катушки, соленоиды или магнитометры. Определение дальности требует, чтобы магнитное поле вследствие тока, индуцированного в обсадной колонне 11, а также его градиент, измеряли в точке, как задано Уравнением 3. Однако приемники 18 также измеряют прямой сигнал, созданный передатчиком 16, затрудняя анализ. Для того чтобы устранить этот прямой сигнал, можно рассматривать несколько подходов. Один иллюстративный подход состоит в вычислении поля передатчика 16 у приемников 18 аналитическим образом и вычитании этого значения из градиентных измерений. Отметим, что этот иллюстративный подход требует знаний свойств формации, как будет понятно специалистам в области техники, имеющих преимущество настоящего изобретения.
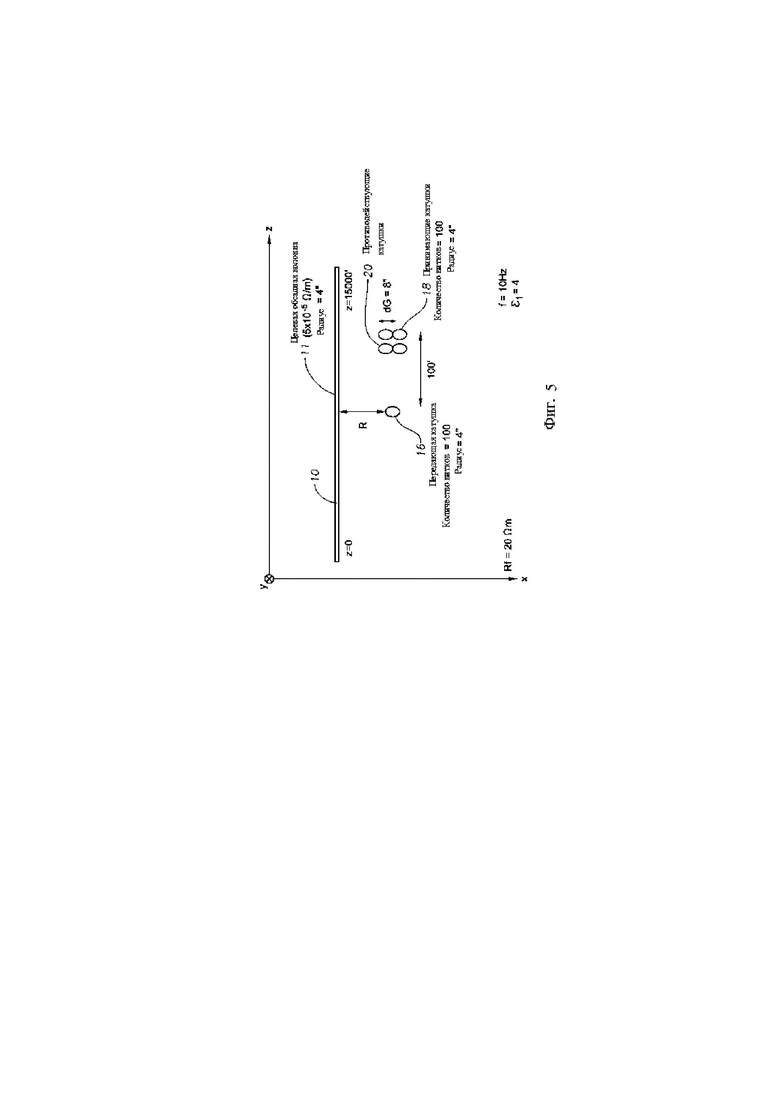
Альтернативный иллюстративный подход состоит в использовании противодействующих приемников 20, обмотка которых находится в противоположном направлении относительно приемников 18, и которые расположены таким образом, что мнимая составляющая в воздушной среде прямого сигнала между комбинацией приемника 18 и противодействующего приемника 20 аннулируется. Хотя в формациях, отличных от воздуха, такое аннулирование нарушено, в большинстве случаев влияния малы. Чтобы показать эти влияния, можно обратиться к примеру, показанному на фиг.6. Для простоты, в этой ситуации целевая обсадная колонна 11 вдоль скважины 10, передатчики 16 и приемники 18 лежат в одной плоскости x-z. Другими словами, в Уравнении 6,  равно нулю. Таким образом, рассмотрение только передатчиков 16 и приемников 18 с их магнитными моментами в направлении y-является достаточным для определения дальности.
равно нулю. Таким образом, рассмотрение только передатчиков 16 и приемников 18 с их магнитными моментами в направлении y-является достаточным для определения дальности.
Все еще ссылаясь на пример, показанный на фиг. 5, целевая обсадная колонна 11 имеет радиус 4 дюйма, а удельное сопротивление на единицу длины имеет значение 5×10-5Ω/м. Длина иллюстративной цели равна 15000 футам. Предположим, что катушка передатчика 16 расположена прямо под средней точкой целевой обсадной колонны 11 на расстоянии R, как показано на фиг. 5. Катушка 16 передатчика имеет 100 витков и радиус 4 дюйма. Катушки 18 приемников находятся на расстоянии 100 футов от передатчика 16 в направлении z, они могут иметь те же радиус и количество витков, что и передатчик 16. Предположим, что противодействующие катушки 20, когда используются, находятся на расстоянии 99 футов от передатчика 16 (и на расстоянии 1 фут от приемников 18), а их магнитные моменты регулируют таким образом, что достигается аннулирование прямого поля в воздушной среде (здесь снова следует отметить, что аннулирована мнимая часть прямого поля, что не означает полное аннулирование реального поля). Для простоты не рассматривалось влияние конструкции приспособления (за исключением антенн) и ствола скважины.
Во время компьютерного моделирования иллюстративных вариантов осуществления настоящего изобретения диэлектрическая проницаемость формации предполагалась равной 4. В примере, приведенном ниже, удельное сопротивление формации по умолчанию было 1 Ω-м (однако, предоставлено сравнение со случаем 20 Ω-м), а частота по умолчанию была 10 Гц (хотя также показан случай с частотой равной 1 Гц). Примерный случай моделировали с использованием числового электромагнитного кода.
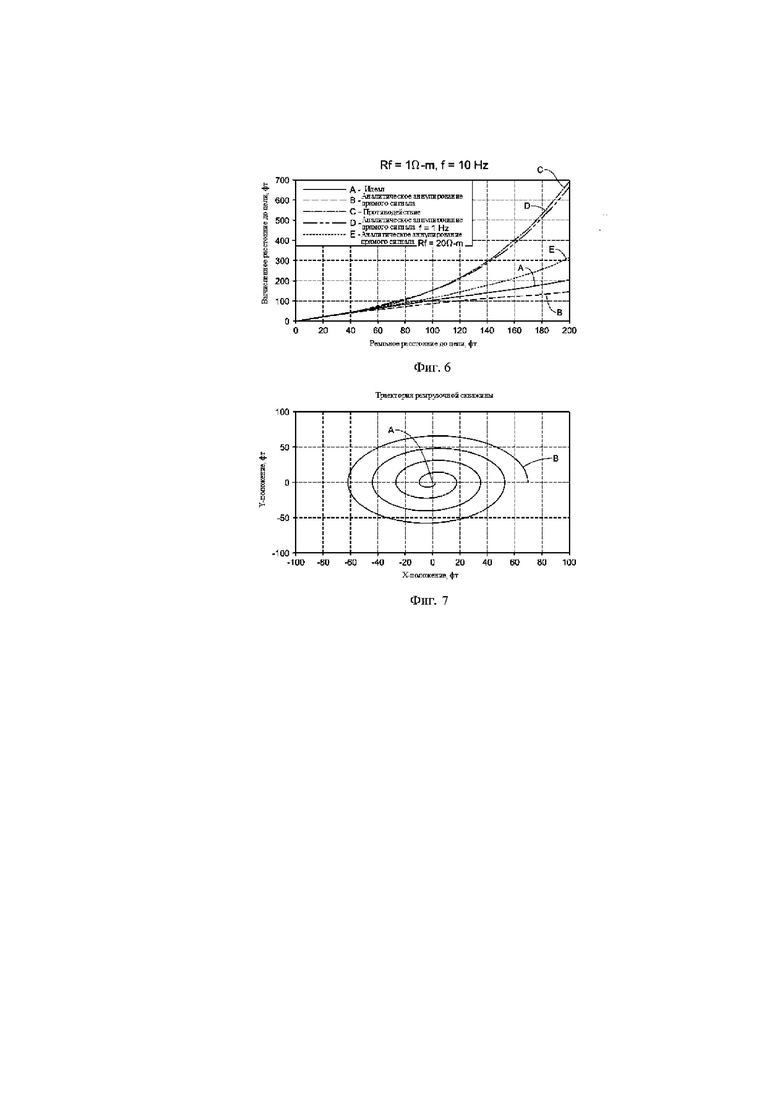
На фиг. 6 показан график, вычерчивающий измеренное расстояние, как функцию реального расстояния этого приспособления от цели, полученное от моделирования иллюстративных вариантов осуществления настоящего изобретения. Идеальный случай (т.е. измеренное расстояние равно реальному расстоянию) показан с помощью линии A. Линия B изображает случай, когда для аннулирования расстояния используют аналитическое аннулирование прямого сигнала. Отметим, что даже в этом случае, по мере того, как расстояние до обсадной колонны становится больше (по сравнению с расстоянием между передатчиком и приемником), результаты начнут отклоняться от идеала. Это происходит из-за нарушений предположения постоянного тока. Тем не менее, результаты почти идентичны идеальному случаю вплоть до 50 футов (половина расстояния между передатчиком и приемником).
Линия C изображает тот же случай, когда устранение прямого сигнала выполняют при помощи противодействия. Хотя результаты хуже, точность резко возрастает по мере того, как это приспособление приближается к цели, где необходима наивысшая точность, если цель подлежит пересечению или избеганию. Результаты, когда рабочую частоту понижают по 1 Гц, показаны с помощью линии D. В этом случае, аннулирование прямого сигнала лучше, но может быть не достигнуто значительное улучшение. Наконец, случай, когда в 20 Ω-м формации используют противодействие, показан с помощью линии Е. В этом случае, противодействие работает намного лучше, а результаты намного ближе к идеальным.
Как видно из Уравнения 7, для вычисления дальности должно быть известно направление до цели. Информация о направлении также необходима для определения направления бурения в пересекающих применениях. Следовательно, иллюстративные варианты осуществления настоящего изобретения также предлагают различные методологии для определения направления при их помощи. В соответствии с одним примером, одной такой возможностью является использование внешней информации от другого приспособления (дальнометрическое приспособление с электродным возбуждением, поверхностное возбуждение и т.д.). В соответствии с альтернативным вариантом осуществления могут использовать градиентное поле 32 на фиг. 4. Направление цели могут определять, взяв угол между ортогональными составляющими градиентной пары катушек приемников. Любая неопределенность угла также исключена, поскольку знак градиента говорит, какая из двух катушек, которые использованы для определения градиента, в этом направлении является ближайшей к цели. К сожалению, градиентный сигнал невелик, таким образом, этот подход может приводить к большим ошибкам при определении угла, когда сигнал слаб (т.е. далек от цели, где точное определение направления является важным для приближения к цели, а не удаления от нее).
В соответствии с еще одним иллюстративным подходом могут использовать общее поле. Здесь, угол между х и y составляющими градиентного поля даст направление к цели. Однако этот угол может быть между 0° и 90°, таким образом, представляя большую неопределенность. Тем не менее, если также рассматривают перекрестно-связанные составляющие общего поля, этот диапазон может быть увеличен от 0° до 180°. Примерную реализацию осуществляют с использованием
Отметим, что знаки полей в этом уравнении зависят от конкретных использованных соглашений. В Уравнении 8, Hij относится к полю, измеренному при помощи приемника с магнитным моментом в направлении j, соответствующем передатчику в направлении i. Затем могут устранять 180° неопределенность посредством использования либо градиентной информации, либо просмотра временных изменений вычисленного диапазона. В общем, также должна быть доступна некоторая априорная информация о положении цели, таким образом, в большинстве практических случаев эта неопределенность не является огромной проблемой.
Для демонстрации применения информации о направлении в измерении расстояний полезен двумерный пример. Рассмотрим пример пересечения фонтанирующей скважины разгрузочной скважиной. На фиг. 7 показана траектория, которой может следовать иллюстративная разгрузочная скважина. На этом чертеже предполагается, что фонтанирующая скважина находится в центре А координатной системы, лежащей в направлении z, а разгрузочная скважина В следует спиральной траектории для пересечения ее. Допустим, что во время этой операции разгрузочная скважина В остается параллельной фонтанирующей скважине А. Параметры моделирования такие, как показаны на фиг. 5; однако, удельное сопротивление формации выбирают равным 20 Ω-м. Кроме того, dG расстояние между градиентными катушками равно  , умноженное на 8 дюймов для градиентной операции в направлениях (x+y) и (x-y), тогда как оно остается 8 дюймов для градиентов в направлении x и y.
, умноженное на 8 дюймов для градиентной операции в направлениях (x+y) и (x-y), тогда как оно остается 8 дюймов для градиентов в направлении x и y.
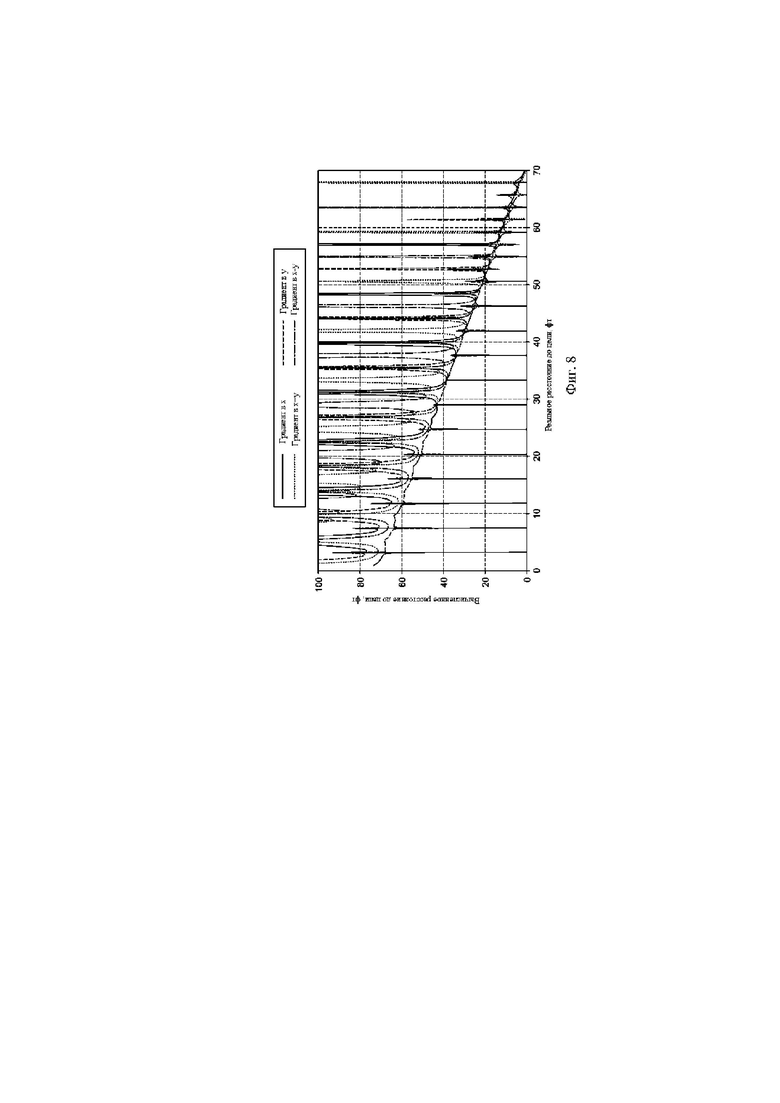
На фиг. 8 начерчен график вычисленного расстояния от разгрузочной скважины В до фонтанирующей скважины А в сравнении с реальным расстоянием для градиентных измерений в различных направлениях. Показано измеренное расстояние до обсадной колонны для градиентных измерений в направлениях x (A), y (B), x+y(C) и x-y (D), как функция реального расстояния между разгрузочной скважиной и фонтанирующей скважиной. Направление до цели вычисляют, используя способ общего поля, описанный выше. Эту информацию о направлении также используют в вычислении дальности, как в Уравнении 7. Как ожидалось, градиенты в различных направлениях не являются точными на всех расстояниях; поскольку азимутальный угол относительно цели изменяется с расстоянием. Однако возможно выбирать наиболее точное расстояние, используя азимутальную информацию. Один пример того, как выбирать наиболее точную составляющую расстояния, задан следующим образом:
Исп. градиент в направлении x; если mod(Φ,180)≤22,5º | mod(Φ,180)>157,5º
Исп. градиент в направлении (x+y); если mod(Φ,180)>22,5º & mod(Φ,180)≤67,5º
Исп. градиент в направлении y; если mod(Φ,180)>67,5º & mod(Φ,180)≤112,5º
Исп. градиент в направлении (x-y); если mod(Φ,180)>112,5º & mod(Φ,180)≤157,5º
Ур.(9).
Используя этот критерий выбора для результатов, показанных на фиг. 8, могут получать один результат расстояния до цели, как показано на фиг. 9. Этот результат показан "строчной" результирующей линией. Для сравнения идеальный случай показан сплошной линией. Можно видеть, что "строчные" результаты являются хорошим приближением к реальному расстоянию, и это приближение дает большую точность по мере приближения к цели.
Отметим, что Уравнение 9 позволяет узнать азимутальный угол/с 180° неопределенностью. Таким образом, этот угол, найденный с использованием Уравнения 8, могут прямо использовать для создания фиг. 9. Однако, если доступна априорная информация, или для устранения 180° неопределенности используют градиентную информацию, фиг. 7 могут воспроизводить с вычисленной траекторией (пунктирная линия), как показано на фиг. 10, на которой иллюстрирована реальная траектория разгрузочной скважины по сравнению с вычисленной траекторией примера пересечения скважины. Здесь ясно показано, как вычисленное положение становится более точным по мере приближения к целевой скважине.
Теперь, после того, как были описаны различные варианты осуществления, будет описана методология, посредством которой определяют скважинные расстояния. Как было описано ранее, иллюстративные системы относительного позиционирования в целом состоят из реализаций с магнитными диполями (передатчиками и приемниками), расположенными с возможностью индуцирования и измерения градиентных магнитных полей, распространяющихся от целевого ствола скважины. На фиг. 11 показана блок-схема способа 1100 дальнометрии, применяемого посредством системы относительного позиционирования, которая использует градиентометрические данные для определения расстояния между первым (т.е. целью) и вторым стволом скважины в соответствии с некоторыми иллюстративными методологиями настоящего изобретения. Снова, конкретное применение может быть, например, применением технологии SAGD или применением пересечения.
Тем не менее, в блоке 1102 бурят первую скважину, используя любую подходящую методологию. Первая скважина имеет более высокую проводимость, чем окружающая формация, что может быть достигнуто посредством использования обсадной колонны первой скважины или с помощью использования некоторого другого удлиненного проводящего корпуса, размещенного вдоль первого ствола скважины. В блоке 1104 во втором стволе скважины размещают по меньшей мере два передатчика с магнитными диполями и по меньшей мере четыре приемника с магнитными диполями. Приемники радиально разделены по оси компоновки низа бурильной колонны. Передатчики и приемники могут размещать во втором стволе скважины различными способами, включая, например, по буровому снаряду, использованному для работы по технологии SAGD или подводной работы. Отметим, что в соответствии с альтернативными методологиями первый и второй стволы скважин могут бурить одновременно.
В блоке 1106 передатчики возбуждают для индуцирования таким образом тока в первом стволе скважины, что приводит к магнитному полю, испускаемому от первого ствола скважины. Затем в блоке 1108 магнитное поле принимают, используя передатчики. В блоке 1110, используя обрабатывающие схемы, операционно связанные с приемниками, система относительного позиционирования использует градиентометрические данные принятого магнитного поля для определения расстояния между первым и вторым стволами скважины. В частности, здесь приемники измеряют градиентное поле принятого магнитного поля в радиальном направлении по компоновке низа бурильной колонны. После анализа градиентного поля система относительного позиционирования определяет, какие действия, если вообще какие-либо, необходимы для сохранения или корректировки требуемой траектории бурения. Такие действия могут являться, например, изменением направления, скорости, нагрузки на долото и т.д. После чего алгоритм возвращается в блок 1106, где он продолжает возбуждать передатчики для непрерывного отслеживания и/или регулировки траектории бурения, как необходимо.
Следовательно, варианты осуществления настоящего изобретения, описанные в настоящем документе, используют передатчики/приемники с магнитными диполями для анализа градиентных измерений для вычисления таким образом расстояния между первой и второй скважиной без необходимости в знании свойств формации и цели. В результате, раскрытая система для дальнометрии предлагает точное измерение дальности до цели с помощью широкодоступных и простых в конструировании катушечных антенн. Кроме того, для облегчения практической реализации этого приспособления также были раскрыты способы устранения прямого сигнала между катушками передатчика и приемника.
Варианты осуществления и способы, описанные в настоящем документе, дополнительно относятся к любому из одного или большего количества следующих параграфов:
1. Способ скважинной дальнометрии, содержащий бурение первого ствола скважины, который содержит удлиненный проводящий корпус, размещение во втором стволе скважины по меньшей мере двух передатчиков с магнитными диполями и по меньшей мере четырех приемников с магнитными диполями, индуцирование тока в первом стволе скважины, используя передатчики, что приводит к магнитному полю, испускаемому от первого ствола скважины, прием магнитного поля, используя указанные приемники, причем градиентное поле измеряют в радиальном направлении по второму стволу скважины, и использование указанного градиентного поля для определения таким образом расстояния между первым и вторым стволами скважин;
2. Способ по параграфу 1, дополнительно содержащий определение направления первого ствола скважины относительно второго ствола скважины, причем определение направления содержит определение общего поля принятого магнитного поля; определение угла между х и y составляющими общего поля; и использование указанного угла для определения направления;
3. Способ по параграфу 1 или 2, дополнительно содержащий использование градиентного поля для определения направления первого ствола скважины относительно второго ствола скважины;
4. Способ по любому из параграфов 1-3, в котором определение направления дополнительно содержит определение угла между ортогональными составляющими градиентного поля; и использование указанного угла для определения направления;
5. Способ по любому из параграфов 1-4, в котором определение расстояния между первым и вторым стволами скважин дополнительно содержит устранение прямого сигнала, излученного от передатчиков;
6. Способ по любому из параграфов 1-5, в котором устранение прямого сигнала содержит вычисление магнитного поля передатчиков на приемниках; и вычитание вычисленного магнитного поля из принятого магнитного поля;
7. Способ по любому из параграфов 1-6, в котором устранение прямого сигнала содержит использование по меньшей мере четырех противодействующих приемников для аннулирования мнимой составляющей прямого сигнала;
8. Способ по любому из параграфов 1-7, в котором указанные по меньшей мере четыре приемника являются двумя парами приемников с магнитными диполями, а определение расстояния и направления дополнительно содержит радиальное расположение двух приемников указанных пар в противоположных направлениях относительно центра измерений во втором стволе скважины и определение градиентного поля в требуемом направлении посредством вычисления разности между магнитными полями на каждом приемнике из указанных пар;
9. Способ по любому из параграфов 1-8, в котором первый ствол скважины является добывающей скважиной; а второй ствол скважины является нагнетательной скважиной, причем указанный способ используют в работе по технологии парогравитационного дренажа (SAGD, Steam Assisted Gravity Drainage);
10. Способ по любому из параграфов 1-9, в котором первый ствол скважины является фонтанирующей скважиной, а второй ствол скважины является разгрузочной скважиной;
11. Способ по любому из параграфов 1-10, в котором передатчики и приемники размещают по буровому снаряду, каротажному снаряду или канатному снаряду, при этом приемники радиально расположены вокруг корпуса бурового, каротажного или канатного снаряда;
12. Способ по любому из параграфов 1-11, дополнительно содержащий направление бурового снаряда, размещенного вдоль второго ствола скважины, используя определенное расстояние между первым и вторым стволами скважин;
13. Способ по любому из параграфов 1-12, дополнительно содержащий избегание первого ствола скважины, используя определение расстояния;
14. Узел для скважинной дальнометрии, содержащий компоновку низа бурильной колонны, содержащую по меньшей мере два передатчика с магнитными диполями; и по меньшей мере четыре приемника с магнитными диполями, радиально расположенными вокруг оси этой компоновки низа бурильной колонны; и обрабатывающие схемы для реализации способа, содержащего индуцирование тока в первом стволе скважины, используя передатчики, что приводит к магнитному полю, испускаемому первым стволом скважины; прием магнитного поля, используя приемники, причем градиентное поле измеряют в радиальном направлении по компоновке низа бурильной колонны; и использование указанного градиентного поля для определения таким образом расстояния между первым и вторым стволами скважин;
15. Узел для скважинной дальнометрии по параграфу 14, дополнительно содержащий четыре противодействующих приемника, расположенных по компоновке низа бурильной колонны между передатчиками и приемниками;
16. Узел для скважинной дальнометрии по параграфу 14 или 15, в котором противодействующие приемники содержат противоположную поляризацию относительно указанных приемников;
17. Узел для скважинной дальнометрии по любому из параграфов 14-16, в котором компоновка низа бурильной колонны является буровым, канатным или каротажным снарядом;
18. Узел для скважинной дальнометрии по любому из параграфов 14-17, в котором передатчики расположены в непараллельном отношении друг к другу по компоновке низа бурильной колонны; приемники радиально разделены в направлении, перпендикулярном оси компоновки низа бурильной колонны; а магнитный момент указанных приемников ориентирован в направлении, перпендикулярном как оси компоновки низа бурильной колонны, так и направлению радиального разделения;
19. Узел для скважинной дальнометрии по любому из параграфов 14-18, дополнительно содержащий восемь приемников, расположенных радиально вокруг корпуса компоновки низа бурильной колонны с интервалом в 45 градусов;
20. Узел для скважинной дальнометрии по любому из параграфов 14-19, в котором передатчики и приемники содержат по меньшей мере один компонент из числа катушки, соленоида или магнитометра.
Кроме того, методологии, описанные в настоящем документе, могут быть воплощены в системе, содержащей обрабатывающие схемы для реализации любого из указанных способов, или в компьютерном программном продукте, содержащем инструкции, которые при выполнении посредством по меньшей мере одного процессора побуждают этот процессор выполнять любой из указанных способов, описанных в настоящем документе.
Хотя были показаны и описаны различные варианты осуществления и методологии, настоящее раскрытие не ограничено такими вариантами осуществления и методологиями, а также будет понятно, что содержит все модификации и вариации, как будет понятно специалистам в области техники. Следовательно, следует понимать, что настоящее раскрытие не предназначено для ограничения до конкретных раскрытых форм. Напротив, существует намерение охватить все модификации, эквиваленты и альтернативы, попадающие в пределы сущности и объема настоящего изобретения, как задано прилагаемой формулой изобретения.
Настоящее изобретение относится к скважинной дальнометрии и, в частности, к дальнометрическому узлу, использующему передатчики и приемники с магнитными диполями, которые анализируют градиентометрические данные для определения и отслеживания относительного местоположения множественных стволов скважин. Способ включает бурение первого ствола скважины, который содержит удлиненный проводящий корпус. Размещение во втором стволе скважины по меньшей мере двух передатчиков с магнитными диполями и по меньшей мере четырех приемников с магнитными диполями. Индуцирование тока в первом стволе скважины, используя передатчики, что приводит к магнитному полю, испускаемому от первого ствола скважины. Прием магнитного поля, используя указанный приемники, причем градиентное поле измеряют в радиальном направлении по второму стволу скважины. Используют указанное градиентное поле для определения расстояния между первым и вторым стволами скважин. 3 н. и 18 з.п. ф-лы, 11 ил.
1. Способ скважинной дальнометрии, содержащий:
бурение первого ствола скважины, который содержит удлиненный проводящий корпус;
размещение во втором стволе скважины по меньшей мере двух передатчиков с магнитными диполями и по меньшей мере четырех приемников с магнитными диполями;
индуцирование тока в первом стволе скважины, используя передатчики, что приводит к магнитному полю, испускаемому от первого ствола скважины;
прием магнитного поля, используя указанный приемники, причем градиентное поле измеряют в радиальном направлении по второму стволу скважины; и использование указанного градиентного поля для определения таким образом расстояния между первым и вторым стволами скважин.
2. Способ по п.1, дополнительно содержащий определение направления первого ствола скважины относительно второго ствола скважины, причем определение направления содержит:
определение общего поля принятого магнитного поля; определение угла между х и y составляющими общего поля и
использование указанного угла для определения направления.
3. Способ по п.1, дополнительно содержащий использование градиентного поля для определения направления первого ствола скважины относительно второго ствола скважины.
4. Способ по п.3, в котором определение направления дополнительно содержит: определение угла между ортогональными составляющими градиентного поля; и использование указанного угла для определения направления.
5. Способ по п. 1, в котором определение расстояния между первым и вторым стволами скважин дополнительно содержит устранение прямого сигнала, излученного от передатчиков.
6. Способ по п.5, в котором устранение прямого сигнала содержит:
вычисление магнитного поля передатчиков на приемниках; и
вычитание вычисленного магнитного поля из принятого магнитного поля.
7. Способ по п.5, в котором устранение прямого сигнала содержит использование по меньшей мере четырех противодействующих приемников для аннулирования мнимой составляющей прямого сигнала.
8. Способ по п.3, в котором указанные по меньшей мере четыре приемника являются двумя парами приемников с магнитными диполями, а определение расстояния и направления дополнительно содержит:
радиальное расположение двух приемников указанных пар в противоположных направлениях относительно центра измерений во втором стволе скважины; и определение градиентного поля в требуемом направлении посредством вычисления разности между магнитными полями на каждом приемнике из указанных пар.
9. Способ по п.1, в котором:
первый ствол скважины является добывающей скважиной; а второй ствол скважины является нагнетательной скважиной, причем указанный способ используют в работе по технологии парогравитационного дренажа (SAGD, Steam Assisted Gravity Drainage).
10. Способ по п.1, в котором:
первый ствол скважины является фонтанирующей скважиной, а второй ствол скважины является разгрузочной скважиной.
11. Способ по п.1, в котором передатчики и приемники размещают по буровому снаряду, каротажному снаряду или канатному снаряду, при этом приемники радиально расположены вокруг корпуса бурового, каротажного или канатного снаряда.
12. Способ по п.1, дополнительно содержащий направление бурового снаряда, размещенного вдоль второго ствола скважины, используя определенное расстояние между первым и вторым стволами скважин.
13. Способ по п.12, дополнительно содержащий избегание первого ствола скважины, используя определение расстояния.
14. Система для скважинной дальнометрии, содержащая обрабатывающие схемы для реализации любого из способов по пп. 1-13.
15. Узел для скважинной дальнометрии, содержащий: компоновку низа бурильной колонны, содержащую по меньшей мере два передатчика с магнитными диполями; и по меньшей мере четыре приемника с магнитными диполями, радиально расположенными вокруг оси этой компоновки низа бурильной колонны; и обрабатывающие схемы для реализации способа, содержащего индуцирование тока в первом стволе скважины, используя передатчики, что приводит к магнитному полю, испускаемому первым стволом скважины; прием магнитного поля, используя приемники, причем градиентное поле измеряют в радиальном направлении по компоновке низа бурильной колонны; и использование указанного градиентного поля для определения таким образом расстояния между первым и вторым стволами скважин.
16. Узел для скважинной дальнометрии по п.15, дополнительно содержащий четыре противодействующих приемника, расположенных по компоновке низа бурильной колонны между передатчиками и приемниками.
17. Узел для скважинной дальнометрии по п.16, в котором противодействующие приемники содержат противоположную поляризацию относительно указанных приемников.
18. Узел для скважинной дальнометрии по п.15, в котором компоновка низа бурильной колонны является буровым, канатным или каротажным снарядом.
19. Узел для скважинной дальнометрии по п.15, в котором передатчики расположены в непараллельном отношении друг относительно друга по компоновке низа бурильной колонны; приемники радиально разделены в направлении, перпендикулярном оси компоновки низа бурильной колонны; и магнитный момент указанных приемников ориентирован в направлении, перпендикулярном как оси компоновки низа бурильной колонны, так и направлению радиального разделения.
20. Узел для скважинной дальнометрии по п.15, дополнительно содержащий восемь приемников, расположенных радиально вокруг корпуса компоновки низа бурильной колонны с интервалом в 45 градусов.
21. Узел для скважинной дальнометрии по п.15, в котором передатчики и приемники содержат по меньшей мере один компонент из числа катушки, соленоида или магнитометра.
| US 20120109527 A1, 03.05.2012 | |||
| СПОСОБ РАЗРАБОТКИ МЕСТОРОЖДЕНИЯ СВЕРХВЯЗКОЙ НЕФТИ | 2011 |
|
RU2471972C1 |
| US 5589775 A, 31.12.1996 | |||
| WO 2012009375 A1, 19.01.2012 | |||
| US 4372398 A1, 08.02.1983. | |||

