ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к акустическому определению расстояния и, в частности, к акустическому способу определения расстояния с применением градиентометрических данных для определения и отслеживания местоположения множества стволов скважин относительно друг друга.
УРОВЕНЬ ТЕХНИКИ
Поскольку наиболее легкие для доступа и добычи ресурсы углеводородов за последнее столетие были истощены, остается все больше осложненных скважин с трудноизвлекаемыми запасами. Кроме того, поскольку в мире постоянно растет спрос на углеводороды, для удовлетворения этого спроса необходима разработка более совершенных способов извлечения. Одним из таких способов является паровой гравитационный дренаж («SAGD»), при котором применяют пар одновременно в двух стволах скважин, расположенных на расстоянии друг от друга. В частности, паровой гравитационный дренаж решает проблему подвижности тяжелой нефти в формации путем нагнетания в нее высокотемпературного пара под высоким давлением. Этот высокотемпературный пар под высоким давлением уменьшает вязкость тяжелой нефти в целях улучшения ее извлечения. Нагнетание пара в формацию происходит из нагнетающего ствола скважины, который пробуривают выше и параллельно с другим, добывающим стволом скважины.
Когда вязкость тяжелой нефти в формации вокруг нагнетающего ствола скважины понижается, она проходит в нижнюю добывающую скважину, из которой нефть извлекают. Предпочтительно два ствола скважин пробуривают на расстоянии всего лишь в несколько метров друг от друга. Расположение нагнетающего ствола скважины должно предполагать очень малый допуск по расстоянию.
Поэтому выполнять такие скважинные работы достаточно сложно. Если нагнетающий ствол скважины расположен слишком близко к добывающему стволу скважины, добывающая скважина будет подвергаться воздействию очень высокого давления и температуры. Если нагнетающий ствол скважины расположен слишком далеко от добывающего ствола скважины, эффективность парового гравитационного дренажа SAGD снижается. Как известно, традиционные магнитоактивные и гравитационные способы разведки имеют недостаток, который состоит в расширении конуса неопределенности, когда скважины становятся длиннее, из-за чего достичь точности в их расположении, которая требуется при паровом гравитационном дренаже (SAGD), сложнее.
Существующие акустические способы определения расстояния зависят от вычислений времени прохождения, которое представляет скоростная кривая и которое может быть неточным из-за погрешностей измерений, изменений траектории ствола скважины и горизонтальной изменчивости акустических свойств формаций. Такие измерения дополнительно осложняются влиянием скважин на вычисление времени прохождения, которые делают оценку времени прохождения менее точной.
Соответственно, в данной области техники существует потребность в усовершенствовании скважинных акустических способов определения расстояния.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 и 2 иллюстрируют альтернативные варианты осуществления системы относительного позиционирования в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения;
Фиг.3 представляет собой поперечный разрез в перспективе, если смотреть вниз в добывающую и нагнетательную скважины с поверхности в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения;
Фиг.4A, 4B и 4C представляют собой поперечные разрезы альтернативных конфигураций приемника, применяемого в оборудовании нижней части бурильной колонны системы относительного позиционирования в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения;
Фиг.5 представляет собой блок-схему способа, применяемого системой относительного позиционирования для вычисления расстояния в соответствии с некоторыми иллюстративными способами по настоящему изобретению; и
Фиг.6 представляет собой блок-схему акустического способа определения расстояния, применяемого системой относительного позиционирования для определения расстояния между первым (т.е. целевым) и вторым стволом скважины в соответствии с некоторыми иллюстративными способами по настоящему изобретению.
ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Иллюстративные варианты осуществления и связанные с ними способы по настоящему изобретению описаны ниже так, как они могли бы быть применены в акустическом способе определения расстояния с применением градиентометрических данных для бурения и отслеживания относительного местоположения стволов скважин. Для большей ясности в данном раскрытии описаны не все признаки фактической реализации или способа. Конечно, следует учитывать, что при разработке любого такого реального варианта осуществления для достижения конкретных целей разработчиков должны быть созданы многочисленные реализации - конкретные решения, в которых соблюдены системные ограничения и ограничения, связанные с бизнесом, которые будут изменяться от одной реализации к другой. Кроме того, следует понимать, что такие проектно-конструкторские работы могут быть сложными и трудоемким, но при этом они будут рутинной задачей для специалистов в данной области техники, которые ознакомятся с настоящим описанием. Дополнительные аспекты и преимущества различных вариантов осуществления и соответствующих способов по настоящему изобретению станут очевидными после изучения нижеследующего описания и чертежей.
В соответствии с раскрытием, приведенным в данном документе, иллюстративные варианты осуществления и способы по настоящему изобретению описывают акустические системы определения расстояния, в которых применяют градиентометрические данные для определения расстояния между первой и второй скважинами при отсутствии каких-либо известных или определяемых характеристик скважины или формации. В основном, это может быть достигнуто путем генерации скважинных акустических волн в скважинном или поверхностном источнике, приема этих волн с помощью множества приемников, расположенных вдоль второй скважины, и вычисления отношения абсолютного сигнала к градиентному сигналу в определенном направлении для определения расстояния между двумя скважинами. Благодаря применению этого способа нормализации варианты осуществления настоящего изобретения позволяют вычислять расстояние до скважины при отсутствии каких-либо данных, связанных с характеристиками среды между скважинами. В описанных в данном документе способах применяют акустические волны с более низкими частотами, чем в традиционных областях применения акустики, или эти способы могут применять с поверхностными источниками, которые вырабатывают в устье скважины акустические волны, которые распространяются вдоль буровой трубы.
Хотя настоящее изобретение может быть применено в различных областях, последующее описание будет сфокусировано на вариантах, применяемых для точного и надежного позиционирования пробуриваемой скважины, «нагнетающей» скважины (т.е. второй скважины), по отношению к соседней целевой первой скважине, как правило, добывающей скважине, таким образом, чтобы бурение нагнетательной скважины происходило приблизительно параллельно по отношению к добывающей скважине. Кроме того, применение способа и системы по настоящему раскрытию особенно целесообразно при бурении скважин с паровым гравитационным дренажом (SAGD), поскольку две скважины могут быть пробурены близко друг к другу, как это требуется в операциях SAGD. Эти и другие варианты применения и/или усовершенствования будут очевидными для специалистов в данной области техники, которые ознакомятся с настоящим описанием.
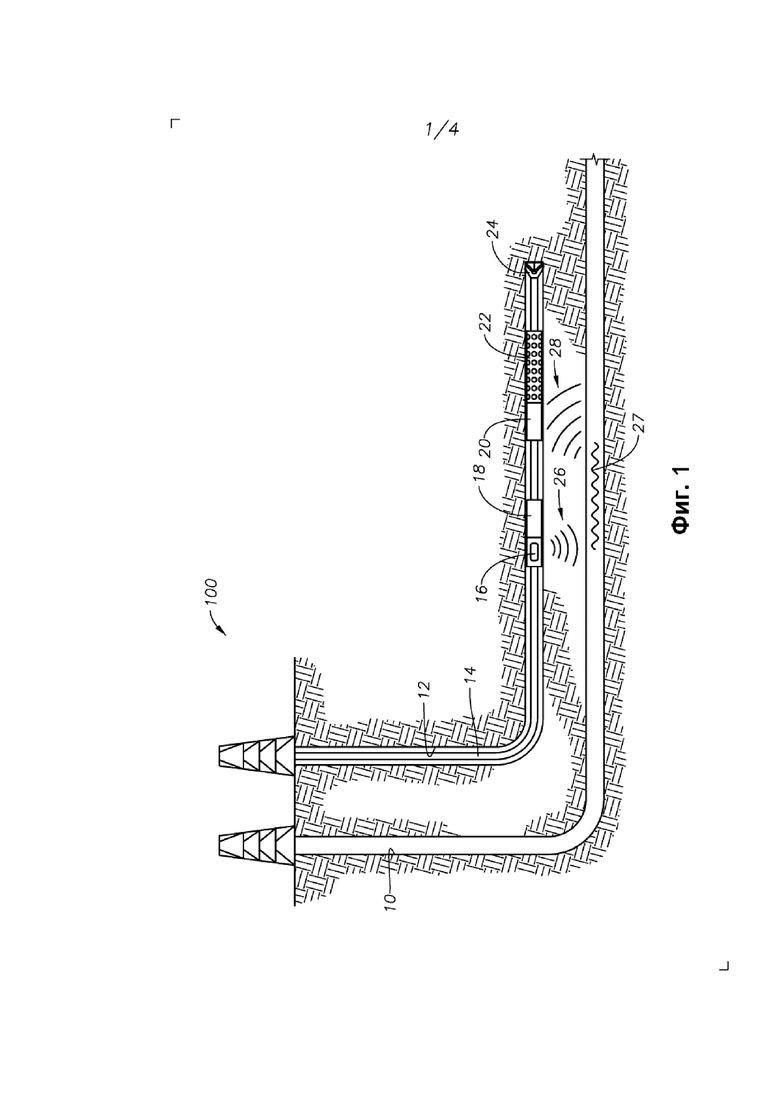
Фиг.1 иллюстрирует систему 100 относительного позиционирования, в которой применяют скважинный генератор-источник в соответствии с иллюстративным вариантом осуществления настоящего изобретения. В соответствии с этим вариантом осуществления добывающую скважину 10 пробуривают с использованием любого подходящего способа бурения. Затем добывающая скважина 10 может быть обсажена; однако, в соответствии с некоторыми вариантами осуществления добывающая скважина 10 может быть необсаженной. Затем пробуривают нагнетательную скважину 12 с использованием бурового снаряда 14, который может представлять собой, например, буровой снаряд с системой проведения каротажа в процессе бурения (“LWD”), буровой снаряд с системой проведения скважинных измерений в процессе бурения (“MWD”) или другой требуемый буровой снаряд. Хотя описано, что нагнетательная скважина 12 пробурена позднее, в соответствии с другими вариантами осуществления добывающая скважина 10 и нагнетательная скважина 12 могут быть пробурены одновременно.
В соответствии с этим иллюстративным вариантом осуществления буровой снаряд 14 содержит оборудование нижней части бурильной колонны, которое содержит акустический генератор 16, располагаемый вблизи первого изолятора 18, который может представлять собой, например, пружинный изолятор с дополнительной массой или изолятор со шлицем. Акустический генератор 16 генерирует низкочастотные акустические волны в диапазоне от 0,1 Гц до 100 кГц. Генератор 16 может быть любого типа, например, он может представлять собой пьезоэлектрический, вибраторный или ударный акустический генератор. Однако, в соответствии с другими вариантами осуществления могут быть применены другие акустические приборы, такие как, например, приборы для акустического каротажа со специальным низкочастотным возбуждением, при условии, что они способны генерировать достаточную мощность.
Рядом с нижним концом оборудования нижней части бурильной колонны находится второй изолятор 20, расположенный вблизи акустических приемников 22. Акустические приемники 22 применяют для измерения давления и они могут представлять собой поршень, сейсмоприемник, пьезоэлектрический приемник давления или акселерометр, что будет очевидным для специалистов в данной области техники, которые ознакомятся с настоящим описанием. В соответствии с некоторыми вариантами осуществления два или большее количество акустических приемников 22 располагают радиально вокруг корпуса оборудования нижней части бурильной колонны для считывания данных направления и расстояния в соответствии с настоящим изобретением, как будет рассмотрено более подробно ниже. Первый и второй изоляторы 18, 20 предотвращают распространение акустических сигналов непосредственно от акустического генератора 16 через корпус бурового снаряда к акустическим приемникам 22. Буровое долото 24 устанавливают на дальнем конце оборудования нижней части бурильной колонны для выполнения буровых работ.
Как будет описано более подробно ниже, в ходе выполнения иллюстративных буровых работ с использованием системы 100 относительного позиционирования буровой снаряд 14 размещают в скважине для бурения нагнетательной скважины 12 после бурения добывающей скважины 10 или одновременно с бурением добывающей скважины 10. Согласно Фиг.1, для создания нагнетательной скважины 12 на требуемом расстоянии и направлении по отношению к добывающей скважине 10 система 100 относительного позиционирования активирует акустический генератор 16 для излучения акустических волн 26 в направлении добывающей скважины 10. В результате этого волны 26 распространяются вдоль защитного кожуха (не показан) или стенок необсаженной части добывающей скважины 10 (распространение волн 27) и через некоторое время отражаются обратно к акустическим приемникам 22, как акустические волны 28. Затем схема (не показана), которая по меньшей мере частично находится внутри бурового снаряда 14, анализирует принятые акустические сигналы, вычисляя отношение абсолютного сигнала к градиентному сигналу в определенном направлении для определения расстояния между добывающей и нагнетательной скважинами 10, 12. Когда расстояние будет определено, схема генерирует сигналы, необходимые для установления бурового снаряда 14 в направлении, при котором будет поддерживаться требуемое расстояние и направление по отношению к добывающей скважине 10.
Как уже упоминалось выше, буровой снаряд 14 содержит схему, наряду с необходимой схемой обработки/хранения/обмена данными, для выполнения вычислений, описанных в данном документе. Эта схема соединена (с возможностью обмена данными) с одним или большим количеством акустических генераторов 16, применяемых для генерации акустических волн 26 и аналогичным образом соединена с акустическими приемниками 22 для обработки отраженных акустических волн 28. Кроме того, схема, которая находится в буровом снаряде 14, может быть соединена (с возможностью обмена данными) посредством проводного или беспроводного соединения с поверхностью для передачи данных обратно вверх по стволу скважины и/или к другим компонентам узла (например, для направления бурового долота 24). В соответствии с альтернативным вариантом осуществления схема, необходимая для выполнения одного или большего количества аспектов способов, описанных в данном документе, может быть по меньшей мере частично расположена в удаленном месте по отношению к буровому снаряду 14, например, на поверхности или в другом стволе скважины. Например, в соответствии с некоторыми вариантами осуществления акустический генератор может быть расположен в другой скважине. Эти и другие варианты будут очевидными для специалистов в данной области техники, которые ознакомятся с настоящим описанием.
Хотя это и не показано на Фиг.1, схема содержит по меньшей мере один процессор и энергонезависимое и машиночитаемое устройство хранения данных, которые соединены посредством системной шины. Программные инструкции, выполняемые процессором для осуществления иллюстративных способов относительного позиционирования, описанных в данном документе, можно хранить в локальном устройстве хранения данных или каком-либо другом машиночитаемом носителе. Также программные инструкции определения положения могут быть загружены в устройство хранения данных с компакт-диска или другого соответствующего носителя данных с помощью проводных или беспроводных способов.
Кроме того, для специалистов в данной области техники будет очевидно, что различные аспекты настоящего изобретения могут быть осуществлены с помощью различных конфигураций вычислительной системы, включая портативные устройства, электронные устройства на основе микропроцессоров или программируемые бытовые электронные устройства, миникомпьютеры, суперкомпьютеры и т.п. Настоящее изобретение допускает применение любого количества компьютерных систем и компьютерных сетей. Это изобретение может быть применено в распределенных вычислительных средах, в которых задачи выполняются устройствами удаленной обработки, связанными посредством сети передачи данных. В распределенной вычислительной среде программные модули могут быть расположены как на локальных, так и на удаленных носителях данных вычислительной машины, включая запоминающие устройства. Поэтому настоящее изобретение может быть реализовано с применением различного аппаратного, программного обеспечения или их комбинации в вычислительной системе или другой системе обработки.
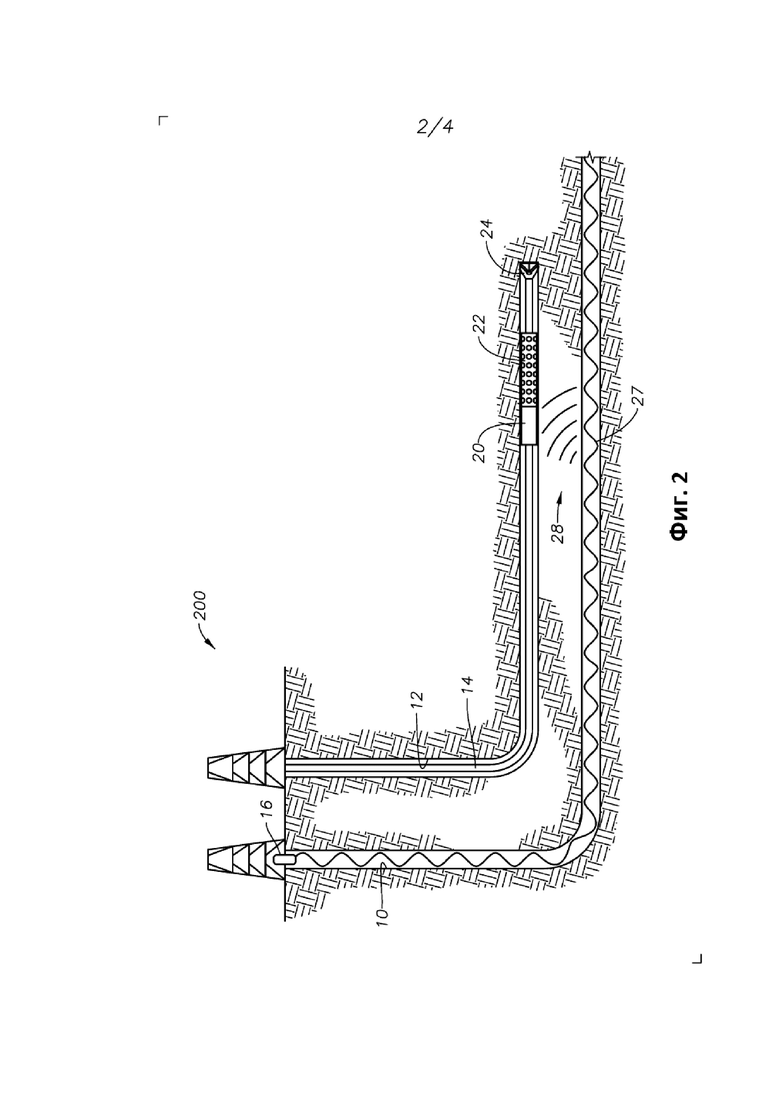
Фиг.2 иллюстрирует систему 200 относительного позиционирования в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения. Система 200 относительного позиционирования отчасти похожа на систему 100 относительного позиционирования, описанную со ссылкой на Фиг.1 и, поэтому, может быть лучше понята со ссылкой на нее, причем одинаковые числа обозначают одинаковые элементы. Однако, имеется отличие, состоящее в том, что буровой снаряд 14 не содержит акустический генератор и примыкающий к нему изолятор. Вместо этого акустический генератор 16 функционально соединен с добывающей скважиной 10 и установлен на поверхности скважины. Как было описано ранее, акустический генератор 16 может представлять собой, например, низкочастотный пьезоэлектрический, вибраторный или ударный источник, генерирующий акустические волны. Однако альтернативно акустический генератор системы 200 также может представлять собой эксплуатационный шум, такой как, например, шум, генерируемый буровым или эксплуатационным оборудованием, расположенным в добывающей скважине 10, или возникающий при движении буровой текучей среды вверх по добывающей скважине 10. В соответствии с этим вариантом осуществления изолятор 20 применяется для подавления или ослабления акустических сигналов, которые проходят от скважины 10 к скважине 12.
При эксплуатации системы 200 относительного позиционирования нагнетательная скважина 12 пробуривается после добывающей скважины 10 или одновременно с ней. Для придания буровому снаряду 14 требуемого направления акустический генератор 16 возбуждают для распространения волн 27 вниз по защитному кожуху и/или стенкам необсаженной части добывающей скважины 10. В результате этого происходит излучение акустических волн 28 в направлении акустических приемников 22, вследствие чего встроенная/расположенная удаленно схема выполняет вычисления, описанные выше, для придания буровому снаряду 14 требуемого направления.
Теперь, после описания различных вариантов осуществления будет описан способ, с помощью которого определяют расстояния между скважинами. Как было описано ранее, системы 100, 200 относительного позиционирования состоят из двух основных компонентов: (i) поверхностного или скважинного источника-генератора, который генерирует акустические волны; и (ii) скважинных приемников, которые воспринимают абсолютные и/или градиентные акустические сигналы, генерируемые источниками-генераторами. В соответствии с одним из вариантов осуществления направление трубы-источника (например, добывающей скважины 10) по отношению к приемникам 22 и расстояние от нее до приемников 22 может быть вычислено из отношения измеряемого абсолютного сигнала к градиентному сигналу.
В соответствии с некоторыми другими вариантами осуществления следует отметить, что функции генератора и приемников могут быть изменены без какого-либо изменения в работе системы согласно теореме взаимности, что будет очевидным для специалистов в данной области техники, которые ознакомятся с настоящим описанием. Однако нижеследующий иллюстративный способ будет основываться на системе 200 относительного позиционирования, в которой применяют поверхностный генератор. Однако настоящее изобретение охватывает как поверхностные, так и скважинные варианты расположения генератора, что также будет очевидным для специалистов в данной области техники, которые ознакомятся с настоящим описанием.
В обоих случаях, при поверхностном и скважинном возбуждении (т.е. в системах 100, 200) генерация волн 27, которые распространяются по скважине, происходит в добывающей скважине 10, причем эти волны могут представлять собой волны сжатия и разрежения, поверхностные волны Стоунли, изгибные волны или волны любого другого типа, которые создают излучаемые головные сейсмические волны. При достаточно низких частотах, аппроксимацию линейного источника, которая может быть выполнена с использованием давления снаружи скважины, записывают следующим образом:
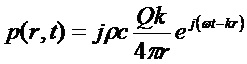
где p(r,t) – давление на расстоянии r и в момент времени t, p – плотность материала, c – скорость звука в воздухе, ω – частота, t – время, k – волновое число, r – расстояние от центра скважины-источника и Q – мощность источника. Из уравнения (1) следует, что направленное вовне давление понижается в соответствии с зависимостью 1/r при условии, что частота (и, следовательно, волновое число k) достаточно низка.
Взяв производную от уравнения (1) в отношении расстояния, получим следующее уравнение:

Как можно видеть из уравнения (2), производная давления содержит схожие члены по сравнению с абсолютным давлением, за исключением члена, содержащего расстояние и волновое число. При вычислении частного свободного и дифференциального членов, получим:
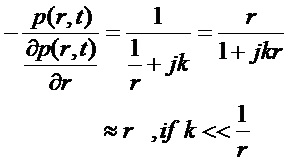
Как показано в уравнении (3), отношение абсолютного сигнала к дифференцированному (или градиентному) сигналу равно r при условии, что частота (или волновое число) является достаточно низкой и между скважинами нет высококонтрастных слоев. Из-за сокращения членов со свойствами материала, которые представляют собой плотность и скорость, на это вычисление не влияют свойства материалов. Уравнение (3) также не зависит от информации по любой другой переменной.
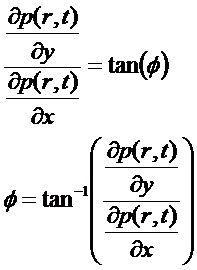
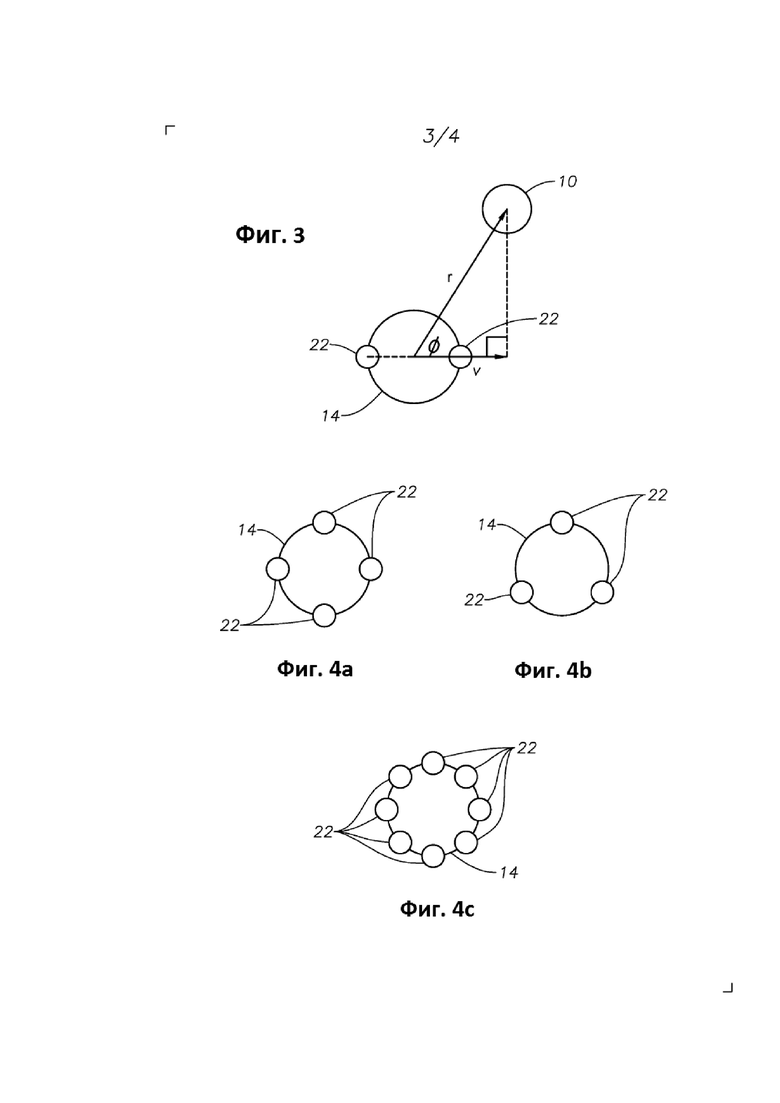
Хотя уравнение (3) в принципе может быть применено для вычисления расстояния, требуется знание направления на целевую скважину, а также производной, причем оба из них не являются легкодоступными. Поэтому в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения в градиентных системах относительного позиционирования, описанных в данном документе, применяют систему из двух приемников, показанную на Фиг.3. Фиг.3 представляет собой поперечный разрез в перспективе, если смотреть вниз в добывающую и нагнетательную скважины 10, 12 с поверхности. Следует отметить, что для упрощения показан только узел 14 (без нагнетательной скважины 12); однако узел 14 так же расположен вдоль скважины 12, как описано ранее. В этом примере приемники 22 разнесены радиально вокруг корпуса бурового снаряда 14 и разделены вдоль направления v, причем вектор v определяют как проекцию направления r на линию, соединяющую два приемника, причем вектор r представляет собой вектор, который соединяет центр корпуса бурового снаряда с целевой скважиной (например, добывающей скважиной 10). Для этой иллюстративной системы производную давления в направлении v задают в следующем виде:

где φ – угол между направлениями вектора r и вектора v, который определяет направление на целевую скважину 10.
Фиг.4A-C представляют собой поперечные разрезы альтернативных конфигураций приемника, применяемого в оборудовании нижней части бурильной колонны системы относительного позиционирования в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения. При рассмотрении конфигурации с четырьмя приемниками по Фиг.4A, если предположить, что горизонтальное направление является осью х, а вертикальная ось является осью у, направление на целевую скважину 10 может быть вычислено следующим образом:
Здесь производные по x- и y- могут быть вычислены из разности между результатами измерений приемника, деленной на известное эквивалентное расстояние между приемниками 22. Абсолютное давление p(r,t) может быть получено путем усреднения всех сигналов приемника или путем выбора одного сигнала. Затем расстояние может быть вычислено следующим образом:

причем в уравнении (6) применяют формулу x или формулу y в зависимости от того, какая из них имеет наибольшую дифференциальную составляющую. В общем случае может быть применено аналогичное решение в конфигурации с тремя приемниками (Фиг.4B) или с восемью приемниками (Фиг.4C), но с соответствующими определениями угла. Применяя решение системы уравнений, которая основывается на уравнении (4), можно получить расстояние одновременно с направлением. Это математически тождественное решение. Конфигурация с восемью приемниками по Фиг.4C может дать дополнительную информацию, которая может быть применена для контроля качества или для выполнения более точного вычисления направления. Контроль качества осуществляют путем разделения вычисления на два вычисления для четырех приемников и сравнения направлений, полученных в обоих случаях. Более точное вычисление может быть выполнено способом наименьших квадратов или с применением другого типа аппроксимации уравнения (4) с использованием всех доступных приемников.
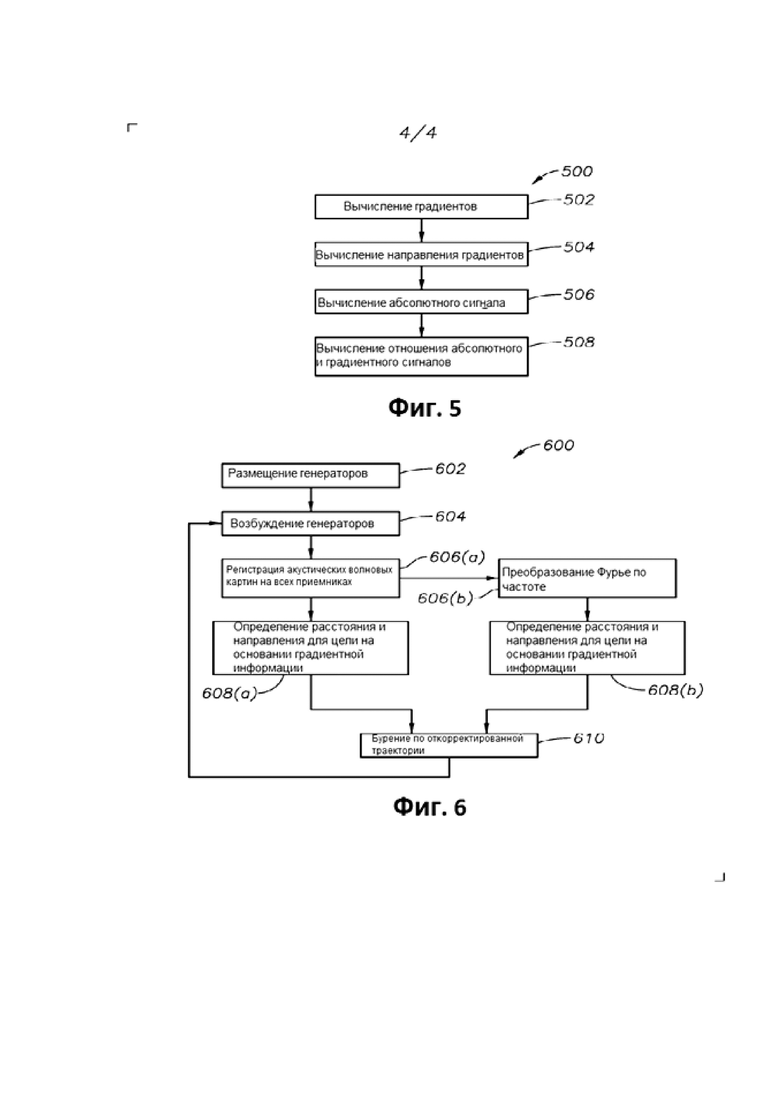
С учетом вышеизложенного Фиг.5 представляет собой блок-схему способа 500, применяемого для вычисления расстояния и относительного расстояния между скважинами в соответствии с некоторыми иллюстративными способами по настоящему изобретению. Следует отметить, что этот способ может быть использован для различных вариантов применения, в том числе, например, при паровом гравитационном дренаже (SAGD), выполнении каротажных работ, подземном ремонте скважин или других скважинных работах. Однако следующий иллюстративный способ будет ориентирован на применении с паровым гравитационным дренажом (SAGD), показанным на Фиг.1 и 2. Согласно Фиг.5, после обнаружения акустических волн 28 приемником 22 система 100, 200 относительного позиционирования с помощью уравнений 1-6, описанных выше, на этапе 502 вычисляет соответствующие градиенты. На этапе 504 система 100, 200 относительного позиционирования вычисляет направление градиента обнаруженных акустических волн 28. На этапе 506 система 100, 200 относительного позиционирования вычисляет абсолютный сигнал акустических волн 28. Затем, на этапе 508 система 100, 200 относительного позиционирования вычисляет расстояние до цели с помощью отношения абсолютных и градиентных сигналов.
Фиг.6 представляет собой блок-схему способа 600 акустического определения расстояния, применяемого системой относительного позиционирования, которая применяет градиентометрические данные для определения расстояния между первым (т.е. целевым) и вторым стволом скважины в соответствии с некоторыми иллюстративными способами по настоящему изобретению. В этом случае в качестве конкретных случаев применения можно также привести паровой гравитационный дренаж (SAGD) или каротажные работы. При этом, на этапе 602 размещают один или большее количество акустических генераторов. Как было отмечено выше, это размещение может предполагать установку генераторов на поверхности скважины таким образом, чтобы генератор был соединен (с возможностью управления) с первым стволом скважины. Альтернативно, генератор может быть размещен во втором стволе скважины с помощью, например, бурового снаряда. В соответствии еще с одним способом генератор может быть размещен вдоль третьего ствола скважины, от которого акустические волны затем распространяются в направлении целевого ствола скважины. В соответствии с другими способами генератор может быть заменен и вместо него для создания акустических волн вдоль первого ствола скважины может быть применен эксплуатационный шум (создаваемый буровой текучей средой, скважинным оборудованием и т.д.). Поверхностный источник, или генератор, может быть мощным источником благодаря меньшему ограничению пространства по сравнению со скважинным вариантом и может находиться в непосредственном контакте с устьем скважины для максимальной подачи акустической энергии. В соответствии с некоторыми вариантами осуществления источник функционирует на низких частотах между 0,1 Гц и 100 кГц и может быть ударного типа.
При этом, после размещения генератора его возбуждают для создания акустической волны, которая распространяется вдоль первой скважины и которая, в результате, излучается от первого ствола скважины ко второму стволу скважины. В данном случае вследствие возбуждения генераторов акустическая энергия поступает в скважину и проходит вниз в первый ствол скважины. В соответствии с некоторыми вариантами осуществления генераторы могут иметь многополярную конфигурацию и их могут применять с монопольным или симметричным возбуждением. Для возбуждения может быть применен короткий импульс или длительный неустановившийся узкополосный сигнал.
На этапе 606(a) один или большее количество акустических приемников располагают вдоль второго ствола скважины для обнаружения и регистрации акустических волновых картин. В соответствии с одним из иллюстративных вариантов осуществления сигналы давления на приемниках регистрируют как функцию времени, начиная с момента возбуждения, непрерывно, или когда на приемник поступает достаточно мощный сигнал. Запись может быть остановлена и/или алгоритм обработки инициируют в заданный момент времени или когда будет достигнут определенный уровень сигнала. Обработка может состоять из этапов, которые предполагают фильтрацию шума и/или кадрирование по времени для определения конкретного целевого типа волны. Следует отметить, что в соответствии с некоторыми вариантами осуществления могут применять один приемник; хотя в соответствии с предпочтительным вариантом осуществления применяют три или большее количество приемников. Эти приемники могут быть размещены во втором стволе скважины различными способами, например, вдоль бурового снаряда, применяемого при паровом гравитационном дренаже (SAGD) или подводных работах.
Альтернативно, этот способ может быть применен в промежутке от одной добывающей скважины до другой или в промежутке от одной нагнетающей скважины до другой. Также следует отметить, что для исключения любого влияния на принимаемый сигнал добывающей или нагнетающей скважин может быть применена коррекция. Такую коррекцию могут осуществлять в виде обратной фильтрации или преобразования с использованием таблицы с предварительно вычисленными данными, при котором преобразование осуществляется из результатов из скважины в результаты вне скважины. Поскольку вычисления в способе 500 не предполагают какого-либо влияния скважины, исключение скважины может значительно повысить точность результатов. Также можно исключить влияние границ любых слоев с помощью аналогичного способа обратной фильтрации или преобразования. В обоих случаях способ обратной фильтрации состоит из применения фильтра, который приблизительно противоположен импульсному отклику скважины или границ слоя.
На этапе 608(a) система относительного позиционирования определяет расстояние и направление в отношении первого ствола скважины с помощью градиентометрических данных. В данном случае, например, может быть применен алгоритм, описанный выше (способ 500). Наконец, на этапе 610 система относительного позиционирования применяет информацию о расстоянии и направлении для придания буровому снаряду требуемого направления. В данном случае система относительного позиционирования определяет, требуется ли выполнение действий, если это применимо, для поддержания или корректирования требуемой траектории бурения. Такими действиями могут быть, например, изменение направления, скорости, нагрузки на долото и т.д. После этого алгоритм возвращается на этап 604, на котором продолжают возбуждать генераторы для непрерывного контроля и/или регулирования траектории бурения по мере необходимости.
В соответствии с альтернативным способом вычисление, аналогичное описанному выше, может быть применено в диапазоне частот путем применения преобразования Фурье в отношении акустического сигнала на первом (этап 606(б)) и последующих подобных этапах для частотных данных, причем расстояние и направление на первый ствол скважины определяют с использованием градиентометрических данных (этап 608 (b0)). В тех вариантах осуществления, в которых используют диапазон частот, реальное, мнимое или комплексное значение принимаемых акустических сигналов может быть применено при вычислении градиентного и абсолютного сигнала, что будет очевидным для специалистов в данной области техники, которые ознакомятся с настоящим описанием.
Соответственно, в описанных в данном документе вариантах осуществления настоящего изобретения применяют измерения акустического градиента для вычисления расстояния между первой и второй скважинами, причем вычисление не зависит от акустических свойств материалов между скважинами. В результате обеспечивают значительное улучшение существующих способов, такое как, например: (i) отсутствие необходимости вмешательства в целевую скважину; и (ii) нет необходимости в бригаде по подземному ремонту скважин, за счет чего достигается значительная экономия средств.
Варианты, описанные здесь, дополнительно относятся к любому одному или большему количеству из следующих пунктов:
1. Способ скважинного акустического определения расстояния, включающий бурение первого ствола скважины; размещение акустического приемника во втором стволе скважины; излучение акустических волн из первого ствола скважины; прием акустических волн акустическим приемником и применение градиентометрических данных принимаемых акустических волн для определения расстояния между первым и вторым стволами скважин.
2. Способ по п. 1, дополнительно включающий применение градиентометрических данных принимаемых акустических волн для определения направления первого ствола скважины по отношению ко второму стволу скважины.
3. Способ по любому из пп. 1-2, согласно которому определение расстояния между первым и вторым стволами скважин дополнительно включает применение абсолютного сигнала принимаемых акустических волн для определения расстояния между первым и вторым стволами скважин.
4. Способ по любому из пп. 1-3, согласно которому применение абсолютного сигнала дополнительно включает применение отношения абсолютного сигнала к градиентному сигналу для определения расстояния между первым и вторым стволами скважин.
5. Способ по любому из пп. 1-4, согласно которому поверхностный генератор генерирует акустические волны вдоль первого ствола скважины.
6. Способ по любому из пп. 1-5, согласно которому генератор, располагаемый вдоль второго ствола скважины, генерирует акустические волны вдоль первого ствола скважины.
7. Способ по любому из пп. 1-6, согласно которому излучение акустических волн от первого ствола скважины содержит генерацию акустических волн в диапазонах частот между 0,1 Гц и 100 кГц.
8. Способ по любому из пп. 1-7, согласно которому первый ствол скважины является добывающей скважиной; а второй ствол скважины является нагнетающей скважиной, причем способ применяют при выполнении операции парового гравитационного дренажа.
9. Способ по любому из пп. 1-8, согласно которому акустический приемник размещают вдоль бурового снаряда, который проходит вниз во второй ствол скважины, причем способ дополнительно включает: генерацию акустических волн с помощью поверхностного генератора и распространение акустических волн вниз по первому стволу скважины, в результате чего акустические волны излучаются в направлении акустического приемника.
10. Способ по любому из пп. 1-9, согласно которому акустический приемник размещают вдоль бурового снаряда, который проходит вниз во второй ствол скважины, причем способ дополнительно включает: генерацию акустических волн с помощью генератора, располагаемого вдоль бурового снаряда; и распространение акустических волн в направлении первого ствола скважины, в результате чего акустические волны излучаются обратно от первого ствола скважины к акустическому приемнику.
11. Способ по любому из пп. 1-10, согласно которому акустические волны генерируют с использованием шума, возникающего при выполнении скважинных операций.
12. Способ по любому из пп. 1-11, согласно которому акустический приемник размещают вдоль бурового снаряда, причем акустический приемник содержит два или большее количество приемников, располагаемых радиально вокруг корпуса бурового снаряда.
13. Способ по любому из пп. 1-12, дополнительно включающий придание направления буровому снаряду, размещаемому вдоль второго ствола скважины, с использованием определенного расстояния между первым и вторым стволами скважин.
14. Способ по любому из пп. 1-13, согласно которому применение градиентометрических данных дополнительно включает по меньшей мере одно из: исключения влияния скважины по первому стволу скважины на принимаемые акустические волны или исключения влияния границ слоя на принимаемые акустические волны.
15. Скважинное оборудование для акустического определения расстояния, содержащее оборудование нижней части бурильной колонны, содержащее два или большее количество приемников, располагаемых радиально вокруг корпуса оборудования нижней части бурильной колонны; и схему обработки для реализации способа, включающего: прием акустической волны, излучаемой из целевого ствола скважины; и применение градиентометрических данных принимаемой акустической волны для определения расстояния между целевым стволом скважины и стволом скважины, в котором расположено оборудование нижней части бурильной колонны.
16. Скважинное оборудование для акустического определения расстояния по п. 15, дополнительно содержащее генератор для распространения акустической волны в направлении целевого ствола скважины.
17. Скважинное оборудование для акустического определения расстояния по любому из пп. 15-16, дополнительно содержащее изолятор, располагаемый вдоль оборудования нижней части бурильной колонны между генератором и приемниками.
18. Скважинное оборудование для акустического определения расстояния по любому из пп. 15-17, в котором оборудование нижней части бурильной колонны представляет собой буровой снаряд, узел для подземного ремонта скважин или узел для выполнения каротажных работ.
Кроме того, способы, описанные в данном документе, могут быть реализованы внутри системы, содержащей схему обработки для реализации любого из способов, или в программном продукте для вычислительной машины, содержащем инструкции, которые при исполнении по меньшей мере одним процессором обуславливают выполнение процессором любого из способов, описанных в данном документе.
Хотя были показаны и описаны различные варианты осуществления и способы, изобретение не ограничено такими вариантами осуществления и способами и предполагают, что оно содержит все модификации и различные варианты, что должно быть очевидно для специалиста в данной области техники. Например, способы относительного позиционирования, описанные в данном документе, могут быть применены для определения местонахождения других объектов, расположенных в скважине, таких как, например, вертикальные скважины или ответвления от нагнетающей или добывающей скважины. Поэтому следует понимать, что изобретение не предназначено для ограничения конкретными описанными формами. Напротив, данное изобретение должно охватывать все модификации, эквиваленты и альтернативы, соответствующие сущности и входящие в объем изобретения, определяемый прилагаемой формулой изобретения.
Изобретение относится к средствам определения расстояния между скважинами. Техническим результатом является повышение точности определения расстояния между скважинами. В частности, предложен способ скважинного акустического определения расстояния, включающий: бурение первого ствола скважины; размещение акустического приемника во втором стволе скважины; излучение акустических волн из первого ствола скважины; прием акустических волн акустическим приемником и применение градиентометрических данных принимаемых акустических волн для определения расстояния между первым и вторым стволами скважин. 3 н. и 16 з.п. ф-лы, 6 ил.
1. Способ скважинного акустического определения расстояния, включающий:
бурение первого ствола скважины;
размещение акустического приемника во втором стволе скважины;
излучение акустических волн из первого ствола скважины;
прием акустических волн акустическим приемником и
применение градиентометрических данных принимаемых акустических волн для определения расстояния между первым и вторым стволами скважин.
2. Способ по п. 1, дополнительно включающий применение градиентометрических данных принимаемых акустических волн для определения направления первого ствола скважины по отношению ко второму стволу скважины.
3. Способ по п. 1, согласно которому определение расстояния между первым и вторым стволами скважин дополнительно включает применение абсолютного сигнала принимаемых акустических волн для определения расстояния между первым и вторым стволами скважин.
4. Способ по п. 3, согласно которому применение абсолютного сигнала дополнительно включает применение отношения абсолютного сигнала к градиентному сигналу для определения расстояния между первым и вторым стволами скважин.
5. Способ по п. 1, согласно которому поверхностный генератор генерирует акустические волны вдоль первого ствола скважины.
6. Способ по п. 1, согласно которому генератор, располагаемый вдоль второго ствола скважины, генерирует акустические волны вдоль первого ствола скважины.
7. Способ по п. 1, согласно которому излучение акустических волн из первого ствола скважины содержит генерацию акустических волн в диапазонах частот между 0,1 Гц и 100 кГц.
8. Способ по п. 1, согласно которому:
первый ствол скважины является добывающей скважиной; а
второй ствол скважины является нагнетающей скважиной,
причем способ применяют при выполнении операции парового гравитационного дренажа.
9. Способ по п. 8, согласно которому акустический приемник размещают вдоль бурового снаряда, который проходит вниз во второй ствол скважины, причем способ дополнительно включает:
генерацию акустических волн с помощью поверхностного генератора и
распространение акустических волн вниз по первому стволу скважины, в результате чего акустические волны излучаются в направлении акустического приемника.
10. Способ по п. 8, согласно которому акустический приемник размещают вдоль бурового снаряда, который проходит вниз во второй ствол скважины, причем способ дополнительно включает:
генерацию акустических волн с помощью генератора, располагаемого вдоль бурового снаряда; и
распространение акустических волн в направлении первого ствола скважины, в результате чего акустические волны излучаются обратно от первого ствола скважины к акустическому приемнику.
11. Способ по п. 1, согласно которому акустические волны генерируют с использованием шума, возникающего при выполнении скважинных операций.
12. Способ по п. 1, согласно которому акустический приемник размещают вдоль бурового снаряда, причем акустический приемник содержит два или большее количество приемников, располагаемых радиально вокруг корпуса бурового снаряда.
13. Способ по п. 1, дополнительно включающий придание направления буровому снаряду, размещаемому вдоль второго ствола скважины, с использованием определенного расстояния между первым и вторым стволами скважин.
14. Способ по п. 1, согласно которому применение градиентометрических данных дополнительно включает по меньшей мере одно из:
исключения влияния скважины по первому стволу скважины на принимаемые акустические волны или
исключения влияния границ слоя на принимаемые акустические волны.
15. Скважинная система для акустического определения расстояния, содержащая схему обработки для реализации любого из способов по пп. 1-14.
16. Скважинное оборудование для акустического определения расстояния, содержащее:
оборудование нижней части бурильной колонны, содержащее два или большее количество приемников, располагаемых радиально вокруг корпуса оборудования нижней части бурильной колонны; и
схему обработки для реализации способа, включающего:
прием акустической волны, излучаемой из целевого ствола скважины, и
применение градиентометрических данных принимаемой акустической волны для определения расстояния между целевым стволом скважины и стволом скважины, в котором расположено оборудование нижней части бурильной колонны.
17. Скважинное оборудование для акустического определения расстояния по п. 16, дополнительно содержащее генератор для распространения акустической волны в направлении целевого ствола скважины.
18. Скважинное оборудование для акустического определения расстояния по п. 17, дополнительно содержащее изолятор, располагаемый вдоль оборудования нижней части бурильной колонны между генератором и приемниками.
19. Скважинное оборудование для акустического определения расстояния по п. 16, в котором оборудование нижней части бурильной колонны представляет собой буровой снаряд, узел для подземного ремонта скважин или узел для выполнения каротажных работ.
| US 20120051184 A1, 01.03.2012 | |||
| US 20090194333 A1, 06.08.2009 | |||
| WO 2009146548 A1, 10.12.2009 | |||
| АКУСТИЧЕСКИЙ ИЗОЛЯТОР ДЛЯ ВНУТРИСКВАЖИННЫХ ПРИМЕНЕНИЙ | 2005 |
|
RU2362189C2 |
| WO 2012067611 A1, 24.05.2012 | |||
| US 20050167101 A1, 04.08.2005. | |||

