ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение, в целом, относится к скважинному определению расстояния и, более конкретно, к устройству для определения расстояния с использованием трехосных измерений электрического и магнитного поля для определения и отслеживания относительного положения множества стволов скважин.
УРОВЕНЬ ТЕХНИКИ
В различных скважинных применениях требуется точное и эффективное определение положения и направления проводящей трубы (например, металлической обсадной трубы). Вероятно, наиболее важным из этих применений является случай самоизливающейся скважины (“blown out well”), в котором целевая скважина подлежит весьма точному пересечению разгрузочной скважиной для остановки выброса. Другое важное применение включает в себя бурение скважины, параллельной существующей скважине в системах гравитационного дренажа с применением пара (Steam Assisted Gravity Drainage, SAGD), не допуская пересечений с другими скважинами в перегруженном нефтяном месторождении, где скважины пробурены в непосредственной близости друг к другу, и отслеживание подземного курса бурения, используя металлическую трубу с инжектированным током над землей в качестве точки отсчета. В применениях SAGD общепринятой практикой является использование кабельных систем для электромагнитного определения расстояния между скважинами. Однако это требует доступа к обеим скважинам, который является трудоемким и дорогим. Альтернативным способом является использование электромагнитных систем каротажа во время бурения, поскольку в нем необходим доступ лишь к одной скважине.
Однако при вышеупомянутом подходе можно только измерять и обрабатывать магнитные поля, используя индуктивные датчики. Хотя способ служил в качестве практического решения в прошлом, он мог ограничивать операции до низких частот и не мог использовать все доступные электромагнитные данные. Недавно были раскрыты другие методы, связанные с измерениями градиента магнитного поля, но эти последние методы требуют установки ряда близко расположенных индуктивных датчиков для аппроксимации градиентов магнитного поля, а не для непосредственного измерения градиентов магнитного поля.
Соответственно, в технике существует необходимость в усовершенствованных и/или альтернативных способах скважинного определения расстояния.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1A иллюстрирует систему относительного позиционирования в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения;
Фиг. 1B иллюстрирует три связанных ортогональных трехосных датчика магнитного поля, расположенных вдоль бурового снаряда, используя систему относительного позиционирования, в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения;
Фиг. 1C представляет собой вид поперечного разреза ориентации датчика электрического поля бурового снаряда в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения;
Фиг. 1D иллюстрирует разнесенные в осевом направлении датчики электрического поля, расположенные вдоль бурового снаряда, в соответствии с некоторыми иллюстративными вариантами осуществления настоящего изобретения;
Фиг. 2 представляет собой структурную схему, отображающую обобщенный способ определения расстояния, используемый для вычисления расстояния между первой целевой скважиной и второй скважиной, направления к первой целевой скважине или ориентации первой целевой скважины, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению;
Фиг. 3A представляет собой структурную схему способа, используемого для вычисления направления, расстояния и ориентации целевой скважины, с применением трехосных измерений электрического и магнитного поля, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению;
Фиг. 3B представляет собой структурную схему, отображающую то, как может быть определено направление от оборудования низа бурильной колонны до целевой скважины, используя вектор Пойнтинга, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению;
Фиг. 3C представляет собой структурную схему, отображающую то, как может быть определено расстояние от оборудования низа бурильной колонны до целевой скважины, используя отношение вектора Пойнтинга к градиенту вектора Пойнтинга, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению;
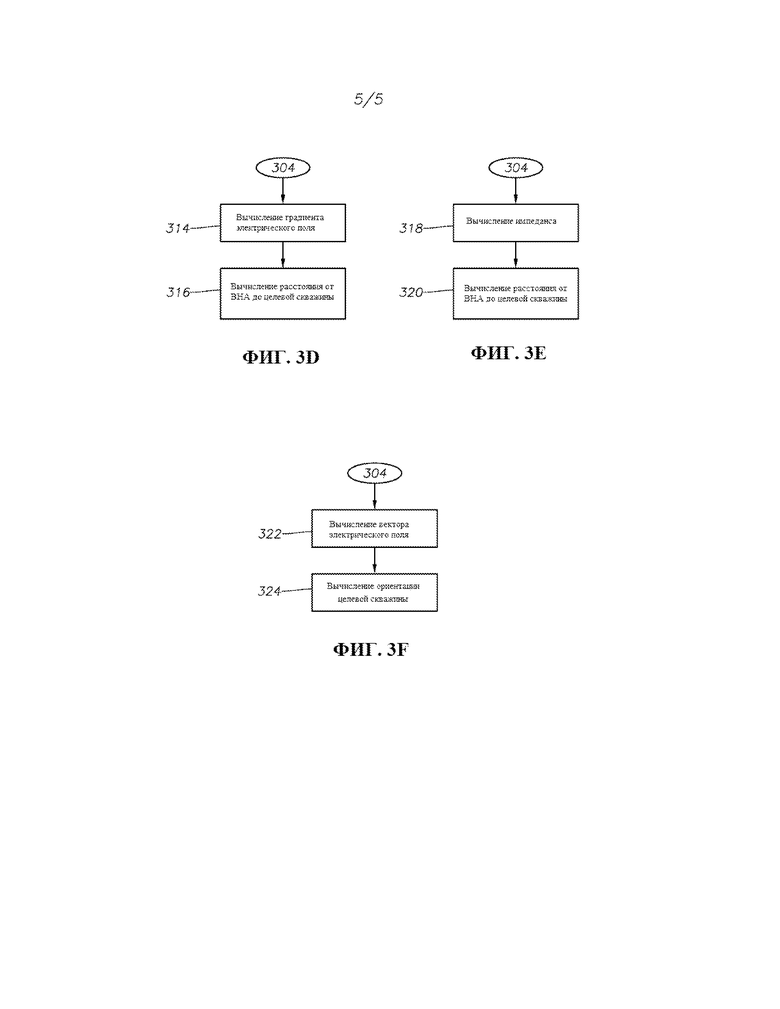
Фиг. 3D представляет собой структурную схему, отображающую то, как может быть определено расстояние от оборудования низа бурильной колонны до целевой скважины, используя градиент измеренного электрического поля, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению;
Фиг. 3E представляет собой структурную схему, отображающую то, как может быть определено расстояние от оборудования низа бурильной колонны до целевой скважины, используя импеданс (полное сопротивление) измеренных электрического и магнитного полей, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению, и
Фиг. 3F представляет собой структурную схему, отображающую то, как может быть определена ориентация целевой скважины, используя измеренное электрическое поле, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Иллюстративные варианты осуществления и связанные с ними способы согласно настоящему изобретению описаны ниже так, как они могли бы быть применены в системах и способах определения расстояния с применением трехосных измерений электрического и магнитного поля для бурения и/или отслеживания относительного местоположения стволов скважин. С целью ясности не все признаки фактического осуществления или способа изложены в настоящем описании. Разумеется, следует понимать, что при усовершенствовании любого такого фактического варианта реализации должны быть приняты многочисленные решения конкретного осуществления для достижения конкретных целей разработчиков, такие как совместимость с системными и экономическими ограничениями, которые изменяются от одного случая применения к другому. Кроме того, понятно, что попытки такого усовершенствования могут быть сложными и трудоемкими, но тем не менее настоящее описание может быть руководством к действию для специалистов, для которых очевидны преимущества настоящего изобретения. Дополнительные аспекты и преимущества различных вариантов осуществления и соответствующих способов согласно настоящему изобретению станут очевидными после ознакомления с приведенным ниже описанием и прилагаемыми чертежами.
В соответствии с описанием, приведенным в настоящем документе, иллюстративные варианты осуществления и способы согласно настоящему изобретению описывают системы определения расстояния, в которых применяют трехосные измерения электрического и магнитного поля для получения вектора Пойнтинга, который является мерой плотности направленного потока энергии электромагнитного поля. В общем, целевую скважину обсаживают и возбуждают с помощью изменяющегося во времени источника тока. В одном из вариантов осуществления настоящего изобретения целевую скважину возбуждают с помощью изменяющегося во времени источника тока в устье целевой скважины. В другом варианте осуществления настоящего изобретения целевую скважину возбуждают с помощью изменяющегося во времени источника тока на поверхности. В еще одном варианте осуществления настоящего изобретения целевую скважину возбуждают с помощью изменяющегося во времени источника тока, расположенного в контрольной скважине.
После выполнения измерений, используя различные алгоритмы, описанные в настоящем документе, схема обработки, расположенная на оборудовании низа бурильной колонны (bottom hole assembly, BHA) (и/или по меньшей мере частично в удаленном местоположении, например, на поверхности, выше по стволу скважины или на объекте, удаленном от буровой площадки), анализирует данные трехосных измерений для определения расстояния и направления целевой обсадной трубы. Следует заметить, что описанные в настоящем документе принципы также применимы для любого продолговатого проводящего тела, кроме обсадной трубы. В одном варианте осуществления направление вектора Пойнтинга будет представлять направление к целевой скважине. В другом варианте осуществления градиент измеренного вектора Пойнтинга будет представлять расстояние до целевой скважины. В еще одном варианте осуществления мнимая составляющая измеренного импеданса будет представлять расстояние до целевой скважины. В другом случае анализ как протяженности, так и направления вектора Пойнтинга будет представлять ориентацию целевой скважины. В еще одном варианте осуществления анализ электрических полей будет представлять ориентацию целевой скважины.
Кроме того, как будет раскрыто в настоящем документе, вектор Пойнтинга, импеданс и электрические поля являются ротационно инвариантными относительно ориентации трехосных датчиков электрического и магнитного поля в измеряемой скважине. Соответственно, в некоторых вариантах осуществления, датчики могут быть поворотными, как часть BHA или устройства, опускаемого в скважину на кабеле, и все же получать те же значения вектора Пойнтинга, импеданса и электрических полей.
Хотя настоящее изобретение может быть использовано в разных областях, последующее описание будет сосредоточено на вариантах применения для точного и надежного позиционирования пробуриваемой скважины, контрольной или «нагнетающей» скважины (т.е. второй скважины), по отношению к ближней целевой первой скважине, обычно – добывающей скважине, так чтобы бурение нагнетающей скважины могло происходить примерно параллельно к добывающей скважине. Целевая скважина должна иметь более высокую проводимость, чем окружающая порода, что может быть осуществлено с помощью использования продолговатого проводящего тела вдоль целевой скважины, такого как, например, обсадная труба, которая уже имеется в большинстве скважин, для сохранения целостности скважины. Кроме того, применение способа и системы согласно настоящему изобретению особенно целесообразно при бурении скважин SAGD, поскольку две скважины могут быть выбурены близко друг к другу, как это требуется в операциях SAGD. Эти и другие варианты применения и/или усовершенствования будут очевидными для специалистов в данной области техники, которые ознакомятся с настоящим описанием.
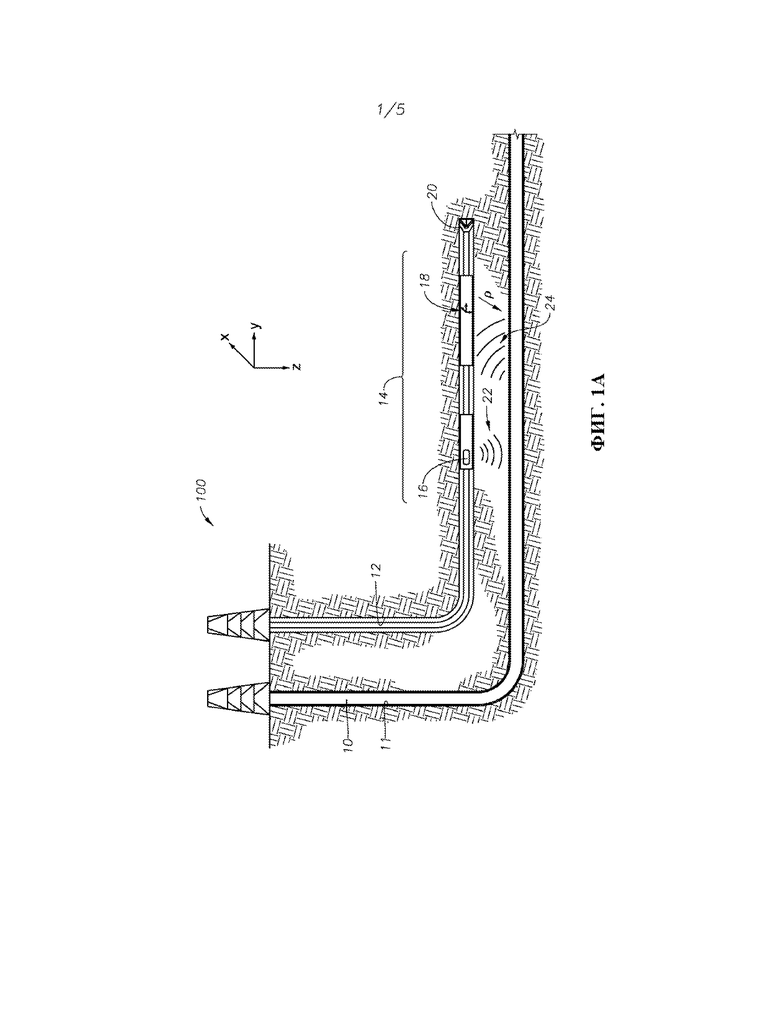
Фиг. 1A иллюстрирует систему 100 относительного позиционирования в соответствии с примером варианта осуществления настоящего изобретения. В данном варианте осуществления добывающую скважину 10 выбуривают с использованием любого подходящего способа бурения. Затем добывающую скважину 10 обсаживают с помощью обсадной трубы 11. Затем выбуривают нагнетающую скважину 12 с использованием BHA 14, которое может представлять собой, например, буровой снаряд с системой проведения каротажа в процессе бурения (logging-while drilling, LWD), буровой снаряд с системой проведения скважинных измерений в процессе бурения (measurement-while drilling assembly, MWD) или другой требуемый буровой снаряд. Хотя нагнетающая скважина 12 описана, как подлежащая выбуриванию впоследствии, в других вариантах осуществления добывающая скважина 10 и нагнетающая скважина 12 могут быть выбурены одновременно. Кроме того, в еще одном альтернативном варианте осуществления BHA 14 может быть воплощено в виде устройства, опускаемого в скважину на кабеле (без бурового снаряда), осуществляя операции каротажа, что должно быть понятно специалистам в данной отрасли, упомянутым здесь.
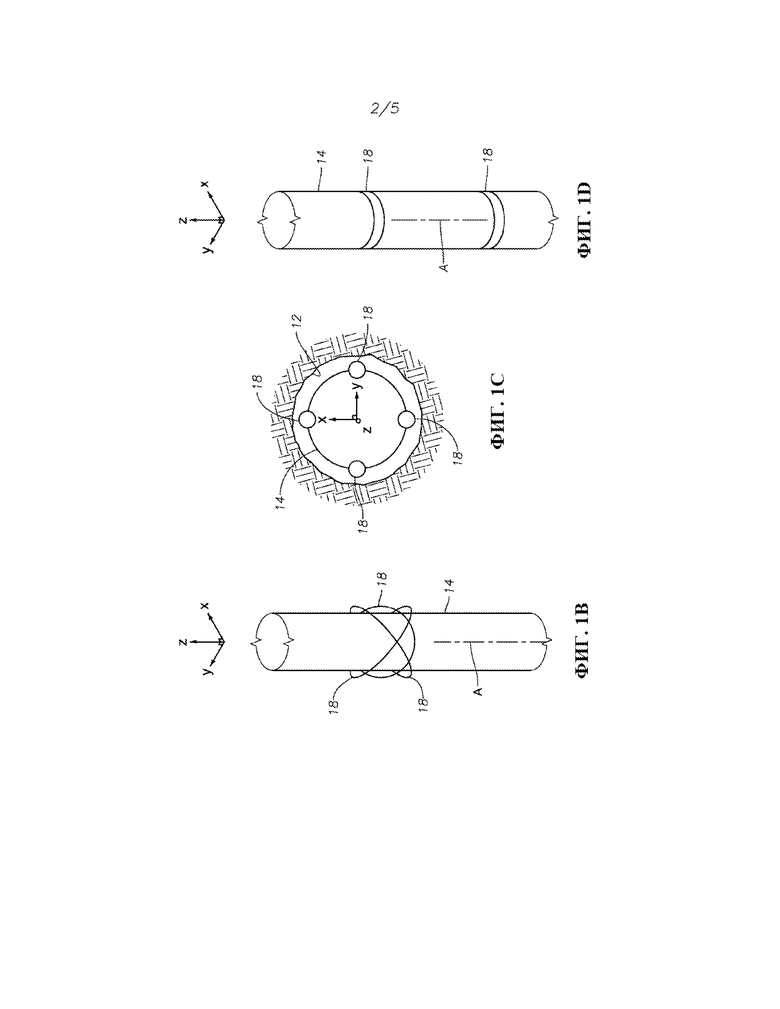
В данном примере варианта осуществления BHA / буровой снаряд 14 содержит один или больше передатчиков 16 магнитного поля. Такой передатчик может представлять собой, например, катушку, наклонную рамочную антенну, или комбинацию электродов, или другой управляемый источник электромагнитного поля. Буровой снаряд 14 также содержит один или больше трехосных датчиков 18 электрического и/или магнитного поля, расположенных над буровым долотом 20. Как понятно специалисту в данной отрасли, датчики, используемые для измерения электрического и магнитного полей, являются различными; однако такие датчики могут быть описаны в настоящем документе отдельно, как датчики электрического и магнитного поля, или совместно, как датчики электромагнитного поля. Указанные датчики могут включать в себя, например, комбинации электродов, катушки, наклонные рамочные антенны, магнитометры или магнитострикционные датчики. Конкретная схема размещения датчиков 18 вдоль бурового снаряда 14 может принимать различные формы. Фиг. 1B-1D иллюстрируют ряд альтернативных схем размещения датчиков 18. В одном иллюстративном варианте осуществления электрическое и магнитное поля измеряют вдоль осей x, y, z (т.е. трех осей), используя три связанных датчика 18 электрического и магнитного поля. Такой вариант осуществления показан на фиг. 1B, которая иллюстрирует три связанных, трехосных ортогональных датчика магнитного поля (например, катушки), расположенных вдоль бурового снаряда 14, которые ориентированы под углом 45 градусов относительно оси A бурового снаряда 14.
В других иллюстративных вариантах осуществления радиальные электрические поля могут быть измерены с использованием по меньшей мере четырех электродов, установленных под одинаковыми углами по окружности оправки. Например, четыре электрода могут быть использованы в качестве датчиков 18 и расположены радиально по окружности оправки бурового снаряда 14 под углами 90 градусов, как показано на фиг. 1C, которая иллюстрирует вид поперечного разреза бурового снаряда 14, проходящего вдоль второго ствола 12 скважины. В еще одном варианте осуществления (не показано), восемь электродов расположены под углами 45 градусов по окружности оправки. В еще одном альтернативном варианте осуществления, как показано на фиг. 1D, осевые электрические поля могут быть измерены на буровом снаряде 14 с использованием по меньшей мере двух электродных датчиков 18, разнесенных в осевом направлении вокруг оси A оправки. В некоторых вариантах осуществления электроды непосредственно подвергаются воздействию буровых растворов и пласта и действуют через гальваническую связь. В других вариантах осуществления электроды непосредственно не подвергаются воздействию буровых растворов и пласта и действуют через емкостную связь. В некоторых других вариантах осуществления, независимо от конструкции используемого датчика, центры каждого из датчиков связаны. Эти и другие схемы датчиков могут быть использованы в рамках настоящего изобретения, как должно быть понятно специалистам в данной отрасли, использующим преимущества настоящего изобретения.
Согласно фиг. 1A, во время примерной операции бурения с использованием системы 100 относительного позиционирования, буровой снаряд 14 устанавливают внутри скважины для бурения нагнетающей скважины 12 после выбуривания добывающей скважины 10 или одновременно с ним. Чтобы поддерживать нагнетающую скважину 12 на необходимом расстоянии и направлении относительно добывающей скважины 10, система 100 относительного позиционирования включает передатчик 16, чтобы распространять электромагнитные поля 22, тем самым возбуждая ток вдоль целевой обсадной трубы 11 добывающей скважины 10. В результате электромагнитные поля 24 распространяются от целевой обсадной трубы 11, где трехосные электрические и магнитные поля измеряют датчиками 18. Локальная или удаленная схема обработки затем использует трехосные измерения электромагнитного поля для определения расстояния или направления добывающей скважины 10, в дополнение к ориентации добывающей скважины 10. Когда относительное положение определено, схема генерирует сигналы, необходимые для управления направлением бурового снаряда 14 в направлении, необходимом для сохранения необходимого расстояния и направления относительно добывающей скважины 10.
Хотя это не показано, следует заметить, что в альтернативных вариантах осуществления ток вдоль обсадной трубы 11 может быть возбужден с помощью изменяющегося во времени источника тока в устье целевой скважины. В другом варианте осуществления настоящего изобретения целевую скважину возбуждают с помощью источника тока на поверхности. Кроме того, хотя это также не показано, буровой снаряд 14 содержит схему обработки (т.е. центр управления системы), необходимую для достижения относительного позиционирования согласно настоящему изобретению в режиме реального времени. Такая схема включает в себя блок связи для осуществления взаимодействия между буровым снарядом 14 и удаленным местоположением (например, на поверхности). Блок визуализации также может быть соединен с блоком связи для контроля данных измерений, подлежащих обработке; например, оператор может вмешиваться в работу системы на основе этих данных. Блок обработки данных может преобразовывать полученные данные в информацию, представляющую положение, направление и ориентацию цели в режиме реального времени. Затем результаты могут быть отображены с помощью блока визуализации.
Центр управления системы бурового снаряда 14 также включает в себя схему памяти/связи, необходимую для выполнения описанных здесь вычислений. В некоторых вариантах осуществления данная схема связана с возможностью передачи данных с передатчиками 16, используемыми для создания электромагнитных полей 22, а также аналогичным образом связана с датчиками 18, чтобы обрабатывать полученные электрические и магнитные поля, образующие электромагнитное поле 24. Кроме того, схема, встроенная в буровой снаряд 14, может быть связана с возможностью передачи данных посредством проводных или беспроводных соединений с поверхностью, посредством этого передавая данные обратно вверх по стволу скважины и/или к другим компонентам снаряда (например, для управления направлением бурового долота, составляющего часть снаряда 14). В альтернативном варианте осуществления центр управления системы или другая схема, необходимая для осуществления одного или больше аспектов описанного в настоящем документе способа, может быть расположен в удаленном местоположении вдали от бурового снаряда 14, например на поверхности или в другом стволе скважины. Например, в некоторых вариантах осуществления передатчик может быть расположен в другой скважине или на поверхности. В других вариантах осуществления данные измерений электромагнитного поля могут быть переданы удаленно в центр управления системы для обработки. Эти и другие варианты изменений будут очевидными для специалистов в данной области техники, которые ознакомятся с настоящим описанием.
Кроме того, встроенная схема включает в себя по меньшей мере один процессор и одно энергонезависимое и машиночитаемое запоминающее устройство, все взаимосвязанные через системную шину. Команды программного обеспечения, выполняемые центром управления системы для осуществления иллюстративных способов относительного позиционирования, описываемых в данном документе, могут храниться в локальном запоминающем устройстве или на каком-то другом машиночитаемом носителе. Также понятно, что команды программного обеспечения для позиционирования также могут быть загружены в запоминающее устройство из компакт-диска или других соответствующих носителей информации проводными или беспроводными способами.
Более того, специалисту в данной области будет понятно, что различные аспекты данного изобретения можно осуществлять на практике с помощью различных конфигураций компьютерной системы, включая портативные устройства, многопроцессорные системы, микропроцессорную или программируемую бытовую электронику, мини-компьютеры, суперкомпьютеры и т.п. Для использования в настоящем изобретении приемлемо любое количество компьютерных систем и компьютерных сетей. Изобретение может быть осуществлено в среде распределенных вычислений, где задачи выполняются с помощью удаленных обрабатывающих устройств, которые связаны с помощью сети связи. В среде распределенных вычислений программные модули могут быть расположены как на локальных, так и на удаленных, сохраняемых на компьютере носителях, включая запоминающие устройства. Следовательно, настоящее изобретение может быть реализовано с применением разнообразной аппаратуры, программного обеспечения или их сочетания, в компьютерной системе или другой обрабатывающей системе.
Теперь, когда описан обобщенный иллюстративный вариант осуществления настоящего изобретения, будет раскрыт способ, с помощью которого определяют относительное позиционирование. Как упомянуто ранее, в вариантах осуществления настоящего изобретения для электромагнитного определения расстояния используют измерения как электрического, так и магнитного поля. В следующих теоретических примерах могут быть показаны иллюстративные варианты осуществления, которые не ограничивают объем настоящего изобретения. Согласно фиг. 1A, целевую скважину 10 можно определить с помощью трехосной системы координат r = {x, y, z} и можно приближенно выразить с помощью бесконечно длинного источника тока, ориентированного в направлении z в однородной геологической среде с удельной электропроводностью σ, так что электрический ток вдоль обсадной трубы 11 можно приближенно выразить как
J(r) = Iδ(r)δ(z)ûz, уравнение (1).
Здесь J(r) – плотность тока, I – ток, δ(r) и δ(z) – дельта-функции, и ûz – единичный вектор, направленный вдоль оси источника тока. Учитывая радиальную симметрию вокруг целевой скважины 10, электромагнитные поля 24 можно описать в цилиндрических координатах r = (z, ρ, θ) вокруг оси z. Следует заметить, что цилиндрические координаты r = (z, ρ, θ) можно преобразовать в декартовы координаты r = (x,y,z), и наоборот. Особый интерес для электромагнитного определения расстояния представляет расстояние до целевой скважины 10, ρ = √(x2 + y2) (следует заметить, что √ обозначает квадратный корень) и направление (угол) к целевой скважине 10, θ. Также можно получить ориентацию целевой скважины 10 относительно бурового снаряда 14.
Как должно быть понятно специалистам в данной отрасли, использующим преимущества настоящего изобретения, электрическое поле при угловой частоте ω вокруг целевой скважины 10 имеет только осевую составляющую в направлении z:
Ez (r,ω) = ((iωµI)/(2п))K0(ikρ)ûz, уравнение (2), где k = √(iωµσ) – волновое число, ρ – радиальное расстояние между двумя скважинами в плоскости xy и K0 – модифицированная функция Бесселя второго рода нулевого порядка. Следует заметить, что в случае, когда целевая скважина 10 выровнена с осевым направлением бурового снаряда 10, осевая составляющая в направлении z электрического поля может быть измерена путем размещения двух разнесенных в осевом направлении датчиков/приемников 18 (например, электродов) вдоль бурового снаряда 14.
Из этого следует, что магнитное поле при угловой частоте ω вокруг целевой скважины 10 имеет тангенциальную составляющую в направлении θ:
Hθ (r,ω) = ((ikI)/(2п))K1(ikρ)ûθ, уравнение (3),
где K1 – модифицированная функция Бесселя второго рода первого порядка, а ûθ – единичный вектор в азимутальном направлении вокруг оси источника тока. При используемых низких частотах и малых расстояниях, обычно встречающихся в электромагнитном определении расстояния, модифицированные функция Бесселя в уравнениях (2) и (3) могут быть приблизительно выражены в виде
K 0(ikρ) ≈ − ln(ikρ) уравнение (4), и
K 1(ikρ) ≈ -1/(ikρ’) уравнение (5)
так что электрическое поле (уравнение 2) и магнитное поле (уравнение 3) при угловой частоте ω, соответственно, выражаются в виде:
Ez (r,ω) = − ((iωµI)/(2п))ln(ikρ)ûz уравнение (6), и
Hθ (r,ω) = − I/(2пρ) ûθ уравнение (7).
Исходя из соображений сохранения энергии, теорема Пойнтинга устанавливает, что для любого электромагнитного поля должна существовать электромагнитная энергия, текущая в среде, вследствие электромагнитных полей. Вектор Пойнтинга, S, который является мерой плотности направленного потока энергии электромагнитного поля, может быть выведен из векторного произведения вектора E электрического поля и вектора H магнитного поля. Для среды с линейной дисперсией с потерями, которая является типичной для горных пород, вектор Пойнтинга определяют в частотной области, как
S = 0,5 E x H* = 0,5 (EyH*z − EzH*y)ûx + 0,5 (EzH*x – ExH*z)ûy + 0,5 (ExH*y – EyH*x)ûz
уравнение (8),
где * обозначает комплексно сопряженное число, а ûx, ûy и ûz – единичные векторы в направленных по x-, y- и z единичных векторах в декартовых координатах относительно оси источника тока. В цилиндрических координатах вектор Пойнтинга (уравнение 8) выражается как
S = 0,5 E x H* = 0,5 (EθH*z − EzH*θ)ûr + 0,5 (ErH*z – EzH*r)ûθ + 0,5 (ErH*θ – EθH*r)ûz
уравнение (9),
где ûr, ûθ и ûz – направленные радиально, азимутально и по оси единичные векторы в цилиндрических координатах относительно оси источника тока. Как следует из приведенных выше уравнений 6 и 7, уравнение 9 может быть сокращено до
S = 0,5E x H* = (−0,5EzH*θ)ûr = − ((iωµI2)/(4п2ρ))ln(ikρ)ûr уравнение (10).
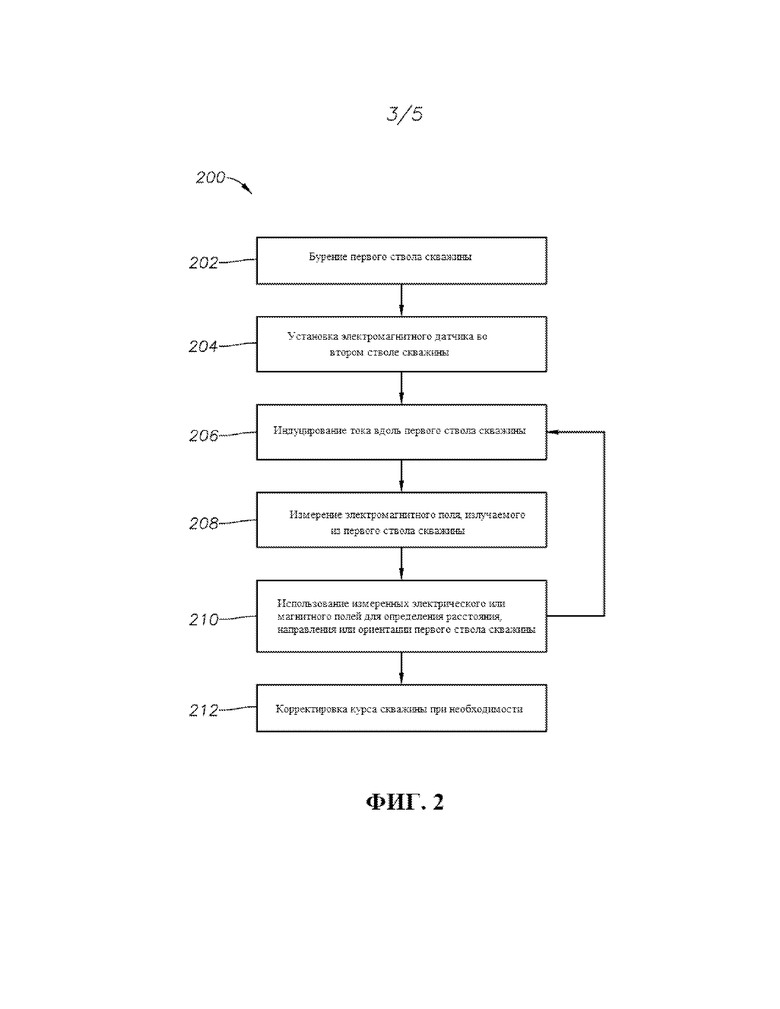
В иллюстративных вариантах осуществления настоящего изобретения центр управления системы использует способ, описанный выше, для выполнения вычислений относительного позиционирования, описанных в настоящем документе. Фиг. 2 представляет собой структурную схему, отображающую обобщенный способ 200 определения расстояния, используемый для вычисления расстояния между первой целевой скважиной и второй скважиной, направления к первой целевой скважине или ориентации первой целевой скважины, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению. Кроме того, конкретным применением может быть, например, применение SAGD. Согласно фиг. 1 и 2 на этапе 202 первый ствол 10 скважины выбуривают, используя любой подходящий способ. Первый ствол скважины 10 имеет более высокую проводимость, чем окружающая порода, что, например, может быть достигнуто, используя обсадную трубу 11 первого ствола 10 скважины, или путем использования какого-то иного продолговатого проводящего тела, расположенного вдоль первого ствола 10 скважины.
На этапе 204 один или больше электрических и/или магнитных датчиков 18 устанавливают во втором стволе 12 скважины. В некоторых вариантах осуществления могут устанавливаться два датчика, которые радиально разделены вдоль оси второго ствола 12 скважины. Датчики 18 могут быть установлены во втором стволе 12 скважины различными способами, в том числе, например, вдоль бурового снаряда 14, используемого в операции SAGD или подводной операции. Следует отметить, что в альтернативных способах первый и второй стволы 10, 12 скважин можно выбуривать одновременно.
На этапе 206, ток возбуждают вдоль первого ствола 10 скважины, что приводит к излучению электромагнитного поля 24 от первого ствола 10 скважины. В общем, ток возбуждают, используя изменяющийся во времени источник тока, который может создаваться различными способами. В одном варианте осуществления настоящего изобретения, ток возбуждают вдоль обсадной трубы 11 с помощью изменяющегося во времени источника тока в устье первого ствола 10 скважины. В другом варианте осуществления настоящего изобретения ток возбуждают вдоль обсадной трубы 11 с помощью изменяющегося во времени источника на поверхности. В еще одном варианте осуществления, как показано на фиг. 1, ток возбуждают вдоль обсадной трубы 11 с помощью электромагнитного передатчика 16, расположенного вдоль бурового снаряда 14 во второй скважине 12.
На этапе 208, электромагнитное поле 24 затем принимается датчиком (датчиками) 18. Как будет подробнее описано ниже, на этапе 210, через центр управления системы, система 100 относительного позиционирования использует трехосные электрические или магнитные поля для вычисления в режиме реального времени расстояния между первым и вторым стволами скважин, направление к первому стволу скважины относительно второго ствола скважины или ориентацию первого ствола скважины. После анализа измеренных трехосных электромагнитных полей система 100 относительного позиционирования определяет, какие действия, если таковые имеются, требуются для сохранения или коррекции необходимого курса бурения на этапе 212. Такими действиями могут быть, например, изменение направления, скорости, нагрузки на долото и т.п. для управления направлением, таким образом, BHA при необходимости. Одновременно алгоритм возвращается к этапу 206, где он продолжается для возбуждения передатчиков, чтобы непрерывно контролировать и/или корректировать курс бурения, при необходимости.
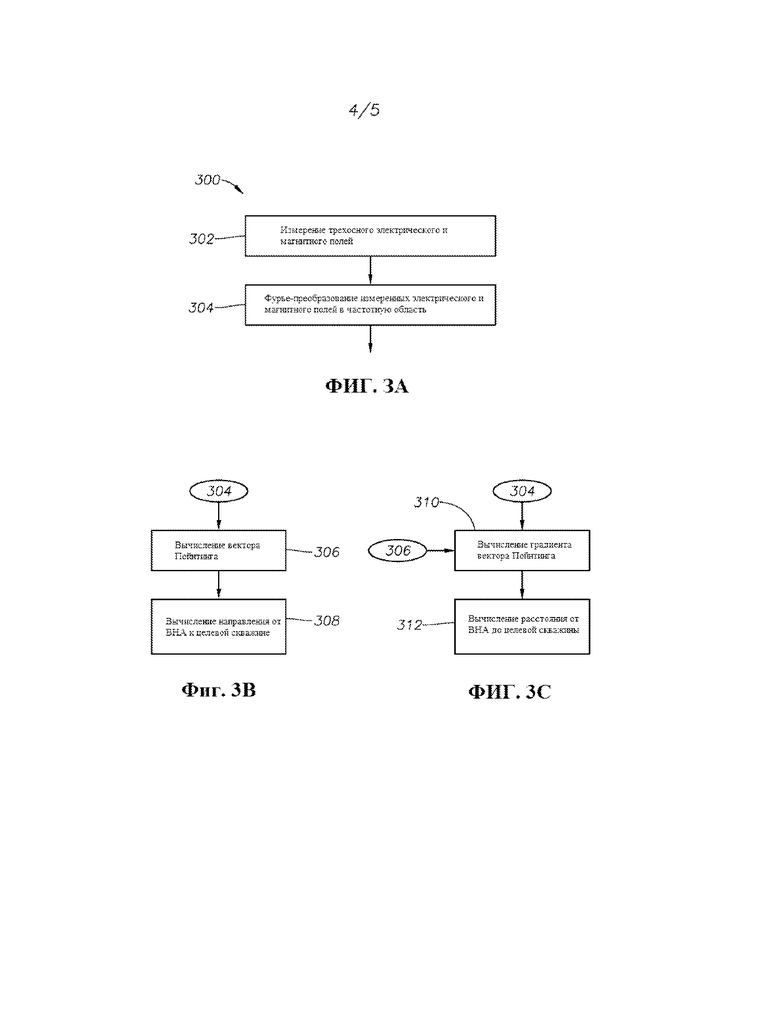
Фиг. 3A представляет собой структурную схему способа 300, используемого для вычисления направления, расстояния и ориентации целевой скважины, с применением трехосных измерений электрического и магнитного поля, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению. После создания тока вдоль обсадной трубы излучаемое электромагнитное поле 24 (фиг. 1A) воспринимается датчиками 18, как указано ранее. На этапе 302, нестационарные трехосные электрические и магнитные поля измеряют с помощью датчиков 18. На этапе 304 центр управления системы в системе относительного позиционирования затем преобразует (например, используя преобразование Фурье) измеренные электрические и магнитные поля в соответствующие им электрические и магнитные поля частотной области, как определено уравнениями 6 и 7, описанными выше. Центр управления системы затем может использовать электрические и магнитные поля частотной области в ряде алгоритмов для выполнения определения расстояния, как описано в иллюстративных структурных схемах на фиг. 3B-3F.
Фиг. 3B представляет собой структурную схему, отображающую то, как может быть определено направление от BHA до целевой скважины, используя вектор Пойнтинга, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению; На этапе 306 центр управления системы вначале вычисляет вектор Пойнтинга, используя уравнения 8-10. Можно заметить, что вектор S в уравнении 10 всегда направлен вдоль ûr к целевой скважине. Таким образом, по вектору Пойнтинга из трехосных измерений электрического и магнитного поля центр управления системы определяет направление к целевой скважине на этапе 308. Магнитное поле фактически получают из измерений магнитной индукции. Отсюда следует, что величина уравнения 10 задается в масштабе магнитной проницаемостью, но направление вектора Пойнтинга остается неизменным. Тогда как уравнение 10 показывает, что можно получать направление к целевой скважине из вектора Пойнтинга, уравнение 10 также показывает, что не просто установить расстояние к целевой скважине из вектора Пойнтинга, поскольку величина уравнения 10 является нелинейной функцией относительно дальности ρ и зависит от тока, волнового числа и проницаемости среды; все из которых могут быть неизвестны.
Фиг. 3C представляет собой структурную схему, отображающую то, как может быть определено расстояние от BHA до целевой скважины, используя отношение вектора Пойнтинга к градиенту вектора Пойнтинга, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению. Используя данные из этапов 304 и 306, центр управления системы вычисляет градиент вектора Пойнтинга на этапе 310. Здесь центр управления системы вычисляет градиент вектора Пойнтинга ∂S/∂ρ, используя:
∂S/∂ρ ≈ ((iωµI2)/(4п2ρ2))(1 − ln(ikρ))ûr, уравнение (11),
где переменные были определены ранее. Затем может быть вычислено отношение вектора Пойнтинга к градиенту вектора Пойнтинга, используя:
ρ(1/((1 − ln(ikρ)) – 1) = |S|/(|∂S/∂ρ|), уравнение (12),
которое для |ikp|<<1 можно сократить до:
ρ ≈ − |S|/(|∂S/∂ρ|), уравнение (13).
В результате на этапе 312 центр управления системы вычисляет расстояние от BHA до целевой скважины, используя абсолютное значение и градиент вектора Пойнтинга. Более конкретно, центр управления системы использует пространственную конечную разность для градиента, таким же способом, как это обычно выполняется для магнитного поля. Измерение градиента вектора Пойнтинга требует множества измерений электрического поля, в дополнение к множеству измерений магнитного поля, которые обычно используют.
Фиг. 3D представляет собой структурную схему, отображающую то, как может быть определено расстояние от BHA до целевой скважины, используя градиент измеренного электрического поля, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению. Используя данные, полученные на этапе 304, центр управления системы вычисляет градиент измеренного электрического поля на этапе 314. По измерениям электрического поля, используя:
Ez (r,ω) = ((iωµI)/(2п))ln(ikρ)ûz, уравнение (14)
и его градиент относительно радиального расстояния:
(∂Ez(r,ω))/(∂ρ) = − ((iωµI)/(2п))(1/ρ)ûz, уравнение (15),
тогда отношение измеренного электрического поля к градиенту измеренного электрического поля по отношению к радиальному расстоянию составляет
ln(ikρ)ρ = |Ez|/(|∂Ez/∂ρ|), уравнение (16).
Используя правило Лопиталя, когда ikp → 0, следует, что:
(1/ρ)/(−1/ρ2) = |Ez|/(|∂Ez/∂ρ|), уравнение (17),
которое упрощается как
ρ = − |Ez|/(|∂Ez/∂ρ|), уравнение (18).
В результате уравнения 18 на этапе 316 расстояние можно вычислить из абсолютного значения и градиента вектора электрического поля, используя конечную разность в пространстве для градиента, таким же способом, как это обычно выполняют для магнитных полей. Измерения градиента электрических полей требуют множества измерений электрического поля, вместо множества измерений магнитного поля, которые обычно используют.
Фиг. 3E представляет собой структурную схему, отображающую то, как может быть определено расстояние от BHA до целевой скважины, используя импеданс измеренных электрического и магнитного полей, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению. Для вычисления расстояния в данном иллюстративном способе центр управления системы вычисляет импеданс на этапе 318, используя функцию Z(r,ω) преобразования импеданса:
Z (r,ω) = (Ez(r,ω))/(Hθ(r,ω)) = − iωµIρln(ikρ) уравнение (19),
где переменные были определены ранее. Используя правило Лопиталя, когда ikp → 0, следует, что:
ωµ ((1/ρ)/(−1/ρ2)) = (Ez(r,ω))/(Hθ(r,ω)), уравнение (20),
которое сокращается до:
ρ = (1/ωµ)Im[(Ez(r,ω))/(Hθ(r,ω))], уравнение (21),
где Im представляет мнимую составляющую импеданса при радиальной частоте, задаваемую в масштабе произведением угловой частоты и магнитной проницаемости. В результате на этапе 320 центр управления системы вычисляет расстояние из комбинации измерений электрического и магнитного поля, а также двух параметров, частоты и магнитной проницаемости. Для большей части формаций магнитная проницаемость может предполагаться равной той, которая существует в свободном пространстве (т.е. немагнитном). В данном иллюстративном способе магнитное поле фактически получают из измерений магнитной индукции, и из этого следует, что уравнение 21 может быть выражено как
ρ = (1/ω)Im[(Ez(r,ω))/(Bθ(r,ω))], уравнение (22),
которое иллюстрирует, что центр управления системы может вычислять расстояние, используя комбинацию измеренного электрического поля и измерений магнитной индукции, а также угловой частоты.
Также следует отметить ориентацию, независимую от трехосных измерений, описанных в настоящем документе. Как указано ранее, трехосные электрические и магнитные поля измеряют датчиками, прикрепленными к BHA, и определяют с помощью декартовой системы координат r’ = {x’, y’, z’}, которая связана с декартовой системой координат целевой скважины r = {x, y, z} посредством трех (обычно неизвестных) эйлеровых углов α, β, θ:
r ’ = R(α, β, φ)r уравнение (23),
где R(α, β, φ) представляет собой эйлерову матрицу вращения. Ротационная инвариантность векторного произведения устанавливает, что:
S(r’,ω) = R(α, β, φ)S(r,ω) = 0,5 E(r’,ω) x H*(r’,ω) = 0,5 R(α, β, φ)E(r,ω) x R(α, β, φ)H*(r,ω),
уравнение (24),
которая сохраняет как величину, так и направление вектора Пойнтинга, независимо от системы координат r’ = {x’, y’, z’}. Эйлерова матрица вращения R(α, β, φ) может быть получена путем прокрустова анализа:
||S(r,ω) – R-1(α, β, φ)S(r’,ω)||F → min, уравнение (25),
при условии ограничения Sz(r,ω) = 0. В частности, уравнение 25 обеспечивает возможность оценки относительного направления и ориентации между BHA и целевой скважиной, когда обе не параллельны.
Отсюда также следует, что величины суммарного осевого электрического и суммарного тангенциального магнитного полей в цилиндрической системе координат r = (z, ρ, θ):
|Ez(r,ω)| = √(E2x’(r’,ω) + E2y’ (r’,ω) + E2z’ (r’,ω)), уравнение (26), и
|Hθ(r,ω)| = √(H2x’(r’,ω) + H2y’ (r’,ω) + H2z’ (r’,ω)), уравнение (27)
равны величине суммарных векторов электрического и магнитного поля в системе координат BHA r’ = {x’, y’, z’}. Соответственно, измеренное электрическое и магнитное поля, описанные в настоящем документе, а также вектор Пойнтинга, вычисленный с использованием способа определения расстояния, описываемого уравнением 12, являются ротационно инвариантными относительно системы координат BHA.
Фиг. 3F представляет собой структурную схему, отображающую то, как может быть определена ориентация целевой скважины, используя измеренное электрическое поле, в соответствии с некоторыми иллюстративными способами согласно настоящему изобретению. Здесь, на этапе 322, центр управления системы вначале вычисляет вектор электрического поля, используя уравнение 26. Следует заметить, что измеренное электрическое поле в уравнении 26 всегда направлено вдоль оси z, которая представляет осевое направление целевой скважины, независимо от ориентации BHA. Таким образом, по вектору электрического поля из трехосных измерений электрического поля центр управления системы может определять ориентацию относительно целевой скважины на этапе 324. Это особенно полезно в ситуации, когда ось целевой скважины не параллельна оси BHA.
Хотя в настоящем документе описаны трехосные измерения электрического и магнитного поля, настоящее изобретение можно также использовать для выполнения определения расстояния с использованием одного или двух измеренных компонентов электрического и магнитного полей, вместо сложных трехосных измерений электрического и магнитного полей. Таким образом, в некоторых иллюстративных способах компоненты электрического поля в одиночку могут быть использованы для вычисления расстояния до целевой скважины или направления целевой скважины, что может быть достигнуто путем соответствующего выбора конфигурации электрода, так что уравнение 26 аппроксимируется с помощью одного или двух измеренных компонентов электрического поля, а не трех компонентов электрического поля.
В других иллюстративных способах компоненты магнитного поля также могут быть использованы вместе с не трехосным измерением электрического поля для вычисления расстояния и направления до целевой скважины. Кроме того, это может быть выполнено путем соответствующего выбора ориентации датчика магнитного поля, так что уравнение 27 аппроксимируется с помощью одного или двух измеренных компонентов магнитного поля, а не трех компонентов магнитного поля.
Хотя настоящее изобретение направлено на применение SAGD, системы и способы согласно настоящему изобретению также могут быть использованы в других вариантах применения, помимо скважины. Здесь может быть пробурена вторая скважина, в которой для обхода первой скважины используют систему относительного позиционирования. Другие варианты применения включают применение в T-образных пересечениях, в которых должна быть пробурена разгрузочная скважина, чтобы разгрузить самоизливающуюся скважину. Эти и другие варианты изменения будут очевидными для специалистов в данной области техники, которые ознакомятся с настоящим описанием.
Варианты осуществления настоящего изобретения, описываемые далее, относятся к одному или более из следующих пунктов:
1. Способ скважинного определения расстояния, включающий в себя бурение первого ствола скважины, содержащего продолговатое проводящее тело; установку датчика электрического поля во втором стволе скважины; индуцирование тока вдоль первого ствола скважины, что приводит к излучению электромагнитного поля из первого ствола скважины; прием электромагнитного поля, используя датчик электрического поля, при этом измеряют электрическое поле электромагнитного поля; и использование измеренного электрического поля для вычисления посредством этого: расстояния между первым и вторым стволами скважин; или направления первого ствола скважины относительно второго ствола скважины.
2. Способ по п. 1, в котором направление первого ствола скважины представляет собой направление измеренного электрического поля.
3. Способ по любому из пп. 1-2, дополнительно включающий в себя определение ориентации первого ствола скважины, используя измеренное электрическое поле.
4. Способ по любому из пп. 1-3, дополнительно включающий в себя вычисление градиента измеренного электрического поля.
5. Способ по любому из пп. 1-4, дополнительно включающий в себя вычисление отношения измеренного электрического поля к градиенту измеренного электрического поля; и вычисление расстояния между первым и вторым стволами скважин, используя данное отношение.
6. Способ по любому из пп. 1-5, в котором датчик магнитного поля устанавливают во втором стволе скважине, а способ дополнительно включает в себя измерение магнитного поля электромагнитного поля; и использование измеренного электрического поля и измеренного магнитного поля, чтобы с помощью этого вычислять расстояние между первым и вторым стволами скважин или направление первого ствола скважины относительно второго ствола скважины.
7. Способ по любому из пп. 1-6, дополнительно включающий в себя использование измеренных электрического и магнитного полей для вычисления вектора Пойнтинга; и использование вектора Пойнтинга для вычисления расстояния между первым и вторым стволами скважин или направления первого ствола скважины относительно второго ствола скважины.
8. Способ по любому из пп. 1-7, в котором направление первого ствола скважины представляет собой направление вектора Пойнтинга.
9. Способ по любому из пп. 1-8, дополнительно включающий в себя вычисление градиента вектора Пойнтинга.
10. Способ по любому из пп. 1-9, дополнительно включающий в себя вычисление отношения вектора Пойнтинга к градиенту вектора Пойнтинга; и вычисление расстояния между первым и вторым стволами скважин, используя данное отношение.
11. Способ по любому из пп. 1-10, дополнительно включающий в себя вычисление импеданса измеренного электрического и магнитного полей.
12. Способ по любому из пп. 1-11, дополнительно включающий в себя вычисление расстояния между первым и вторым стволами скважин, используя указанный импеданс.
13. Способ по любому из пп. 1-12, в котором вычисление расстояния включает в себя вычисление отношения мнимой составляющей импеданса при радиальной частоте к произведению радиальной частоты и магнитной проницаемости; и вычисление расстояния между первым и вторым стволами скважин, используя данное отношение.
14. Способ по любому из пп. 1-13, в котором измеренное электрическое поле представляет собой трехосное измерение электрического поля.
15. Способ по любому из пп. 1-14, в котором измеренное магнитное поле представляет собой трехосное измерение магнитного поля.
16. Способ по любому из пп. 1-15, в котором измеренные электрическое и магнитное поля представляют собой суммарные электрические и магнитные поля; и измеренные суммарные электрические и магнитные поля являются ротационно инвариантными.
17. Способ по любому из пп. 1-16, в котором вычисленные векторы Пойнтинга являются ротационно инвариантными.
18. Способ по любому из пп. 1-17, в котором вычисления расстояния или направления выполняются в режиме реального времени.
19. Способ по любому из пп. 1-18, в котором электромагнитный датчик во втором стволе скважины установлен на оборудовании низа бурильной колонны.
20. Способ по любому из пп. 1-19, в котором оборудование низа бурильной колонны представляет собой буровой снаряд, каротажное оборудование или устройство, опускаемое в скважину на кабеле.
21. Способ по любому из пп. 1-20, дополнительно включающий в себя управление направлением оборудования низа бурильной колонны, установленного вдоль второго ствола скважины, с использованием вычислений расстояния или направления.
22. Способ по любому из пп. 1-20, в котором ось оборудования низа бурильной колонны не параллельна оси первого ствола скважины.
23. Способ по любому из пп. 1-22, в котором первый ствол скважины является добывающей скважиной; а второй ствол скважины является нагнетающей скважиной, при этом способ используют в операции гравитационного дренажа с применением пара.
24. Способ по любому из пп. 1-23, в котором первый ствол скважины является самоизливающейся скважиной, а второй ствол скважины является разгрузочной скважиной.
25. Способ по любому из пп. 1-23, дополнительно включающий в себя обход первого ствола скважины, используя вычисление расстояния.
26. Способ по любому из пп. 1-25, в котором индуцирование тока вдоль первого ствола скважины включает в себя индуцирование тока с использованием изменяющегося во времени источника тока в устье первой скважины; изменяющегося во времени источника тока в местоположении на поверхности; или изменяющегося во времени источника тока вдоль оборудования низа бурильной колонны.
27. Система относительного позиционирования для скважинного определения расстояния, содержащая оборудование низа бурильной колонны, предназначенное для расположения вдоль контрольной скважины; один или больше трехосных датчиков электрического и магнитного поля, расположенных вдоль оборудования низа бурильной колонны; и схему обработки, связанную с датчиками и выполненную с возможностью выполнения способа, включающего в себя: измерение электрического поля, излучаемого из целевой скважины; и использование измеренного электрического поля для вычислений с его помощью: расстояния между контрольной скважиной и целевой скважиной; или направления целевой скважины относительно контрольной скважины.
28. Система относительного позиционирования по п. 27, дополнительно содержащая электромагнитный передатчик, расположенный вдоль оборудования низа бурильной колонны.
29. Система относительного позиционирования по любому из пп. 27-28, в которой датчики представляют собой три соотнесенные ортогональные магнитные катушки, ориентированных под углом 45 градусов относительно оси оборудования низа бурильной колонны; по меньшей мере четыре электрода, расположенные радиально вокруг оборудования низа бурильной колонны; или по меньшей мере два электрода, расположенные на расстоянии друг от друга в осевом направлении вдоль оборудования низа бурильной колонны.
30. Система относительного позиционирования по любому из пп. 27-29, в которой оборудование низа бурильной колонны представляет собой буровой снаряд, каротажное оборудование или устройство, опускаемое в скважину на кабеле.
31. Система относительного позиционирования по любому из пп. 27-30, в которой обрабатывающая схема дополнительно выполнена с возможностью выполнения любого из способов по пп. 3-17.
Кроме того, способы, описанные здесь, могут быть реализованы в системе, содержащей схему обработки для осуществления какого-либо из способов, или в компьютерном программном продукте, содержащем команды, которые, при выполнении по меньшей мере одним процессором, приводят к выполнению процессором какого-либо из способов, описанных в настоящем документе.
Соответственно, посредством использования указанных иллюстративных систем и способов, расстояние, направление и ориентация целевой скважины могут быть получены посредством ротационно инвариантного анализа трехосных измерений электрического и магнитного поля из BHA, содержащего электромагнитные датчики. Трехосные датчики электрического и магнитного поля могут быть установлены в любом скважинном устройстве без явной необходимости обрабатывать или извлекать информацию о вращении относительно скважинного BHA или устройства, опускаемого в скважину на кабеле. Кроме того, расстояние, направление и ориентация целевой скважины могут быть получены из одной позиции измерения.
Преимущества настоящего изобретения многочисленны. Например, такие преимущества включают в себя: непосредственное измерение электрического поля и/или градиентов электрического поля, генерируемого целевой скважиной, с использованием трехосных датчиков электрического поля; направление измеренного электрического поля воспроизводит ориентацию целевой скважины; направление целевой скважины получают из измеренного электрического поля и градиента электрического поля; непосредственное измерение вектора Пойнтинга и/или градиентов вектора Пойнтинга электромагнитных полей, генерируемых целевой скважиной, с использованием трехосных датчиков электрического и магнитного поля; направление вектора Пойнтинга воспроизводит направление и ориентацию целевой скважины; непосредственное измерение функции преобразования импеданса электромагнитных полей, генерируемых целевой скважиной, с использованием трехосных датчиков электрического и магнитного поля; функция преобразования импеданса воспроизводит расстояние до целевой скважины; ротационная инвариантность электрических полей, градиентов электрического поля, вектора Пойнтинга, градиента вектора Пойнтинга и функции преобразования импеданса относительно ориентации датчика; и интеграция в режиме реального времени с буровыми системами.
Хотя были показаны и описаны различные варианты и способы осуществления, изобретение не ограничивается такими вариантами и способами осуществления и включает в себя все модификации и вариации, как будет очевидно для специалиста в данной области. Ввиду этого следует понимать, что изобретение не ограничивается конкретными описанными формами. Наоборот, изобретение охватывает все модификации, эквиваленты и альтернативные варианты, попадающие в рамки сущности и объема изобретения, как определено в прилагаемой формуле изобретения.
Изобретение относится к средствам контроля положения скважины в процессе бурения. Техническим результатом является расширение арсенала технических средств определения расстояния между скважинами. В частности, предложен способ скважинного определения расстояния, включающий в себя: бурение первого ствола скважины, содержащего продолговатое проводящее тело; установку датчика электрического поля во втором стволе скважины; индуцирование тока вдоль первого ствола скважины, в результате чего из первого ствола скважины излучается электромагнитное поле; прием электромагнитного поля, используя датчик электрического поля, при этом измеряют электрическое поле электромагнитного поля, и использование измеренного электрического поля для вычисления посредством этого: ориентации первого ствола скважины, и расстояния между первым и вторым стволами скважин или направления первого ствола скважины относительно второго ствола скважины. 2 н. и 28 з.п. ф-лы, 11 ил.
1. Способ скважинного определения расстояния, включающий в себя:
бурение первого ствола скважины, содержащего продолговатое проводящее тело;
установку датчика электрического поля во втором стволе скважины;
индуцирование тока вдоль первого ствола скважины, в результате чего из первого ствола скважины излучается электромагнитное поле;
прием электромагнитного поля, используя датчик электрического поля, при этом измеряют электрическое поле электромагнитного поля, и
использование измеренного электрического поля для вычисления посредством этого: ориентации первого ствола скважины, и
расстояния между первым и вторым стволами скважин или направления первого ствола скважины относительно второго ствола скважины.
2. Способ по п. 1, в котором направление первого ствола скважины представляет собой направление измеренного электрического поля.
3. Способ по п. 1, дополнительно включающий в себя вычисление градиента измеренного электрического поля.
4. Способ по п. 3, дополнительно включающий в себя: вычисление отношения измеренного электрического поля к градиенту измеренного электрического поля и вычисление расстояния между первым и вторым стволами скважин, используя данное отношение.
5. Способ по п. 1, в котором датчик магнитного поля также устанавливают во втором стволе скважине, а способ дополнительно включает в себя: измерение магнитного поля электромагнитного поля и использование измеренного электрического поля и измеренного магнитного поля для вычисления с помощью этого:
расстояния между первым и вторым стволами скважин или направления первого ствола скважины относительно второго ствола скважины.
6. Способ по п. 5, дополнительно включающий в себя: использование измеренных электрического и магнитного полей для вычисления вектора Пойнтинга и использование вектора Пойнтинга для вычисления: расстояния между первым и вторым стволами скважин или направления первого ствола скважины относительно второго ствола скважины.
7. Способ по п. 6, в котором направление первого ствола скважины представляет собой направление вектора Пойнтинга.
8. Способ по п. 6, дополнительно включающий в себя вычисление градиента вектора Пойнтинга.
9. Способ по п. 8, дополнительно включающий в себя: вычисление отношения вектора Пойнтинга к градиенту вектора Пойнтинга и вычисление расстояния между первым и вторым стволами скважин, используя данное отношение.
10. Способ по п. 5, дополнительно включающий в себя вычисление импеданса измеренного электрического и магнитного полей.
11. Способ по п. 10, дополнительно включающий в себя вычисление расстояния между первым и вторым стволами скважин, используя указанный импеданс.
12. Способ по п. 11, в котором вычисление расстояния включает в себя: вычисление отношения мнимой составляющей импеданса при радиальной частоте к произведению радиальной частоты и магнитной проницаемости и вычисление расстояния между первым и вторым стволами скважин, используя данное отношение.
13. Способ по п. 1, в котором измеренное электрическое поле представляет собой трехосное измерение электрического поля.
14. Способ по п. 5, в котором измеренное магнитное поле представляет собой трехосное измерение магнитного поля.
15. Способ по п. 5, в котором: измеренные электрическое и магнитное поля представляют собой суммарные электрические и магнитные поля и измеренные суммарные электрические и магнитные поля являются ротационно инвариантными.
16. Способ по п. 6, в котором вычисленные векторы Пойнтинга являются ротационно инвариантными.
17. Способ по п. 1, в котором вычисления расстояния или направления выполняются в режиме реального времени.
18. Способ по п. 1, в котором датчик электрического поля во втором стволе скважины установлен на оборудовании низа бурильной колонны.
19. Способ по п. 18, в котором оборудование низа бурильной колонны представляет собой буровой снаряд, каротажное оборудование или устройство, опускаемое в скважину на кабеле.
20. Способ по п. 18, дополнительно включающий в себя управление направлением оборудования низа бурильной колонны, установленного вдоль второго ствола скважины, с использованием вычислений расстояния или направления.
21. Способ по п. 18, в котором ось оборудования низа бурильной колонны не параллельна оси первого ствола скважины.
22. Способ по п. 1, в котором:
первый ствол скважины представляет собой добывающую скважину, а второй ствол скважины представляет собой нагнетающую скважину, причем указанный способ используют в операции гравитационного дренажа с применением пара.
23. Способ по п. 1, в котором:
первый ствол скважины представляет собой самоизливающуюся скважину, а второй ствол скважины представляет собой разгрузочную скважину.
24. Способ по п. 1, дополнительно включающий в себя обход первого ствола скважины, используя вычисление расстояния.
25. Способ по п. 18, в котором индуцирование тока вдоль первого ствола скважины включает в себя индуцирование тока с использованием: изменяющегося во времени источника тока в устье первой скважины; изменяющегося во времени источника тока в местоположении на поверхности или изменяющегося во времени источника тока вдоль оборудования низа бурильной колонны.
26. Система относительного позиционирования для скважинного определения расстояния, содержащая:
оборудование низа бурильной колонны, предназначенное для расположения вдоль контрольной скважины;
один или больше трехосных датчиков электрического и магнитного поля, расположенных вдоль оборудования низа бурильной колонны, и схему обработки, связанную с датчиками и выполненную с возможностью выполнения способа, включающего в себя: измерение электрического поля, излучаемого из целевой скважины, и использование измеренного электрического поля для вычисления посредством этого:
ориентации ствола контрольной скважины и расстояния между контрольной скважиной и целевой скважиной или
направления целевой скважины относительно контрольной скважины.
27. Система относительного позиционирования по п. 26, дополнительно содержащая электромагнитный передатчик, расположенный вдоль оборудования низа бурильной колонны.
28. Система относительного позиционирования по п. 26, в которой датчики представляют собой:
три соотнесенные ортогональные магнитные катушки, ориентированные под углом 45 градусов относительно оси оборудования низа бурильной колонны; по меньшей мере четыре электрода, расположенные радиально вокруг оборудования низа бурильной колонны, или по меньшей мере два электрода, расположенные на расстоянии друг от друга в осевом направлении вдоль оборудования низа бурильной колонны.
29. Система относительного позиционирования по п. 26, в которой оборудование низа бурильной колонны представляет собой буровой снаряд, каротажное оборудование или устройство, опускаемое в скважину на кабеле.
30. Система относительного позиционирования по п. 26, в которой обрабатывающая схема дополнительно выполнена с возможностью выполнения любого из способов по пп. 3-16.
| US 5218301 A, 08.06.1993 | |||
| US 4072200 A, 07.02.1978 | |||
| US 20060235633 A1, 19.10.2006 | |||
| СПОСОБ И СИСТЕМА ДЛЯ ТОЧНОГО НАПРАВЛЕНИЯ БУРЕНИЯ ДВОЙНЫХ СКВАЖИН | 2005 |
|
RU2386810C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ (ВАРИАНТЫ), СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ, УЗЕЛ СОЛЕНОИДА УСТРОЙСТВА ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ | 2007 |
|
RU2468200C2 |
| US 20110308794 A1, 22.12.2011. | |||

