1. Область техники
[01] Представленное раскрытие относится к системам и способам для наклона медицинских устройств для ухода за детьми и в частности для сохранения целостности окружающей среды вокруг детей во время регулировок угла наклона поддерживающих ребенка устройств.
2. Описание предшествующего уровня техники
[02] Хорошо известно, что дети уязвимы для инфекций и бактериальных организмов, вирусных организмов и других патогенных организмов, которые могут вызывать инфекции. По меньшей мере в некоторых случаях они могут передаваться посредством передачи по воздуху из окружающего воздуха, содержащего зараженные частицы. Известно применение инкубатора, устройства обогрева ребенка, поддерживающего ребенка устройства и/или медицинского устройства для ухода за детьми, например новорожденными, в условиях интенсивной терапии или где-либо еще, например, для поддержания среды с подходящей температурой, притоком воздуха, влажностью, стерильными условиями и/или другими условиями окружающей среды. Среды, в которых обычно используют инкубаторы и/или устройства обогрева детей, такие как, например, больницы, обычно страдают от широкого диапазона патогенных организмов. Известно, что некоторые дети могут, в определенных условиях, получать пользу от расположения под наклонным углом, а не на плоской поверхности. Например, подъем верхней части может предотвращать гастроэзофагеальный рефлюкс (GER) у недоношенных детей. Подъем ножной части может быть полезен для новорожденных, имеющих сердечную недостаточность.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[03] Соответственно задача одного или более вариантов осуществления представленного изобретения состоит в предоставлении системы для наклона поддерживающего ребенка устройства, имеющего терморегулируемую область. Система содержит платформу наклона, корпус, опорный элемент, первый исполнительный механизм и второй исполнительный механизм. Платформа наклона выполнена с возможностью расположения под поддерживающим ребенка устройством. Платформа наклона выполнена с возможностью наклона вокруг оси наклона. Под платформой наклона расположен корпус. Корпус удерживает опорный элемент, при этом опорный элемент обеспечивает опору для платформы наклона для сохранения ориентации платформы наклона при вращении вокруг оси наклона. Корпус удерживает опорный элемент таким образом, что положение опорного элемента относительно корпуса является регулируемым. Регулирование положения опорного элемента относительно корпуса регулирует ориентацию платформы наклона при вращении вокруг оси наклона. Первый исполнительный механизм находится на первой стороне относительно поддерживающего ребенка устройства. Первый исполнительный механизм выполнен с возможностью регулирования положения опорного элемента относительно корпуса, регулируя тем самым ориентацию платформы наклона при вращении. Первый исполнительный механизм расположен и приводится в действие за пределами терморегулируемой области поддерживающего ребенка устройства. Второй исполнительный механизм находится на второй стороне относительно поддерживающего ребенка устройства, которая находится напротив первой стороны. Второй исполнительный механизм выполнен с возможностью регулирования положения опорного элемента относительно корпуса, регулируя тем самым ориентацию платформы наклона при вращении. Второй исполнительный механизм расположен и приводится в действие за пределами терморегулируемой области поддерживающего ребенка устройства.
[04] Еще один аспект одного или более вариантов осуществления представленного изобретения состоит в предоставлении системы для наклона поддерживающего ребенка устройства, имеющего терморегулируемую область. Система содержит платформу наклона, корпус, опорный элемент и исполнительный механизм. Платформа наклона выполнена с возможностью расположения под поддерживающим ребенка устройством. Платформа наклона выполнена с возможностью наклона вокруг оси наклона. Платформа наклона имеет центральную ось. Под платформой наклона расположен корпус. Корпус удерживает опорный элемент, при этом опорный элемент обеспечивает опору для платформы наклона для сохранения ориентации платформы наклона при вращении вокруг оси наклона. Корпус удерживает опорный элемент таким образом, что положение опорного элемента относительно корпуса является регулируемым. Регулирование положения опорного элемента относительно корпуса регулирует ориентацию платформы наклона при вращении вокруг оси наклона. Опорный элемент смещен по меньшей мере на 190 мм от оси наклона платформы наклона. Опорный элемент расположен таким образом, что имеется возможность светотерапии со стороны обращенной вниз поверхности. Исполнительный механизм выполнен с возможностью регулирования положения опорного элемента относительно корпуса, регулируя тем самым ориентацию платформы наклона при вращении. Исполнительный механизм расположен и приводится в действие за пределами терморегулируемой области поддерживающего ребенка устройства.
[05] Еще один аспект одного или более вариантов осуществления представленного изобретения состоит в предоставлении способа поддержки ребенка внутри терморегулируемой области поддерживающего ребенка устройства с использованием системы, имеющей платформу наклона, расположенную под поддерживающим ребенка устройством, первый исполнительный механизм, второй исполнительный механизм, корпус, расположенный под платформой наклона, и опорный элемент. Способ включает удерживание опорного элемента с помощью корпуса таким образом, что положение опорного элемента относительно корпуса является регулируемым, при этом регулирование положения опорного элемента относительно корпуса регулирует ориентацию платформы наклона при вращении вокруг оси наклона; предоставление опоры для платформы наклона за счет опорного элемента для сохранения ориентации платформы наклона при вращении вокруг оси наклона; и получение воздействия посредством одного или обоих из первого исполнительного механизма, расположенного на первой стороне относительно поддерживающего ребенка устройства, и/или второго исполнительного механизма, расположенного на второй стороне относительно поддерживающего ребенка устройства, при этом воздействие регулирует положение опорного элемента относительно корпуса, регулируя тем самым ориентацию платформы наклона при вращении, при этом воздействие получают за пределами терморегулируемой области поддерживающего ребенка устройства, и при этом вторая сторона находится напротив первой стороны.
[06] Еще один аспект одного или более вариантов осуществления состоит в предоставлении системы, выполненной с возможностью поддержки ребенка внутри терморегулируемой области поддерживающего ребенка устройства. Система содержит средство наклона, средство размещения, средство подъема, средство поддержки, первое исполнительное средство и второе исполнительное средство. Средство наклона, расположенное под поддерживающим ребенка устройством, предназначено для наклона поддерживающего ребенка устройства вокруг оси наклона. Средство подъема имеет положение относительно средства размещения, которое находится ниже средства наклона. Положение средства подъема является регулируемым. Регулирование положения относительно средства размещения регулирует ориентацию при вращении средства наклона вокруг оси наклона. Средство поддержки предоставляет опору для средства наклона с целью сохранения ориентации при вращении средства наклона вокруг оси наклона. Первое исполнительное средство находится на первой стороне относительно поддерживающего ребенка устройства для получения воздействия, при этом воздействие на первое исполнительное средство регулирует положение средства подъема относительно средства размещения, регулируя тем самым ориентацию при вращении средства наклона. Воздействие на первое исполнительное средство получают за пределами терморегулируемой области поддерживающего ребенка устройства. Второе исполнительное средство находится на второй стороне относительно поддерживающего ребенка устройства для получения воздействия. Воздействие на второе исполнительное средство регулирует положение средства подъема относительно средства размещения, регулируя тем самым ориентацию при вращении средства наклона. Воздействие на второе исполнительное средство получают за пределами терморегулируемой области поддерживающего ребенка устройства. Вторая сторона находится напротив первой стороны.
[07] Эти и другие задачи, признаки и характеристики представленного изобретения, а также способы работы и функции связанных элементов конструкции и комбинация деталей и экономика производства, станут более очевидны при рассмотрении следующего описания и приложенной формулы изобретения со ссылкой на сопровождающие чертежи, которые образуют часть данного описания, на которых одинаковые ссылочные номера обозначают соответствующие детали на различных фигурах. Однако необходимо ясно понимать, что чертежи предназначены только для цели пояснения и описания и не предназначены для определения границ изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[08] Фиг. 1 иллюстрирует различные составные элементы системы для наклона в соответствии с одним или более вариантами осуществления;
[09] фиг. 2 иллюстрирует изометрическое изображение поддерживающего ребенка устройства в соответствии с одним или более вариантами осуществления;
[10] фиг. 3 иллюстрирует поперечное сечение поддерживающего ребенка устройства в соответствии с одним или более вариантами осуществления;
[11] фиг. 4 иллюстрирует различные составные элементы системы для наклона в соответствии с одним или более вариантами осуществления;
[12] фиг. 5-7 иллюстрируют различные составные элементы, связанные с механизмом расцепления для отсоединения платформы наклона от опорного элемента в соответствии с одним или более вариантами осуществления; а
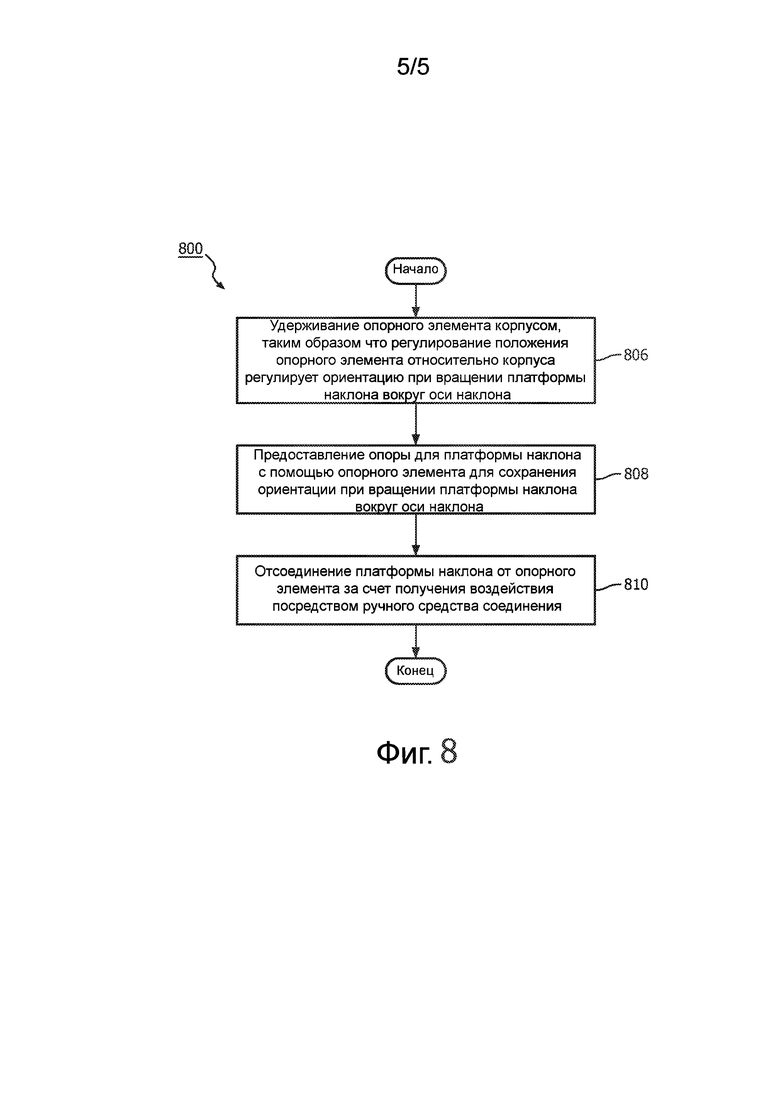
[13] фиг. 8 иллюстрирует способ наклона поддерживающего ребенка устройства в соответствии с одним или более вариантами осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[14] Как используется в данном документе, утверждение, что две или более деталей или составных элементов "связаны" должно означать, что детали соединены или действуют вместе либо прямо, либо непрямо, т. е. посредством одной или более промежуточных деталей или составных элементов, до тех пор, пока существует связь. Как используется в данном документе, "непосредственно соединены" означает, что два элемента находятся в непосредственном контакте друг с другом. Как используется в данном документе, "неподвижно соединенный" или "зафиксированный" означает, что два составных элемента соединены таким образом, чтобы двигаться заодно, сохраняя в то же время постоянную ориентацию друг относительно друга.
[15] Как используется в данном документе, слово "цельный" означает, что составной элемент создан в виде единой детали или блока. То есть составной элемент, который содержит детали, которые созданы по-отдельности, а затем соединены вместе в качестве блока, не является "цельным" составным элементом или корпусом. Как используется в данном документе, утверждение, что две или более детали или составных элемента "сцеплены" друг с другом, должно означать, что детали прикладывают усилие друг против друга либо непосредственно, либо посредством одной или более промежуточных деталей или составных элементов. Как используется в данном документе, термин "количество" должен означать один или целое число большее, чем один (т. е. множество).
[16] Указанные направления, используемые в данном документе, такие как, например, и без ограничения, верх, низ, левый, правый, верхний, нижний, передний, задний и их производные, относятся к ориентации элементов, показанных на чертежах, и не являются ограничивающими в отношении формулы изобретения за исключением случаев явного изложения.
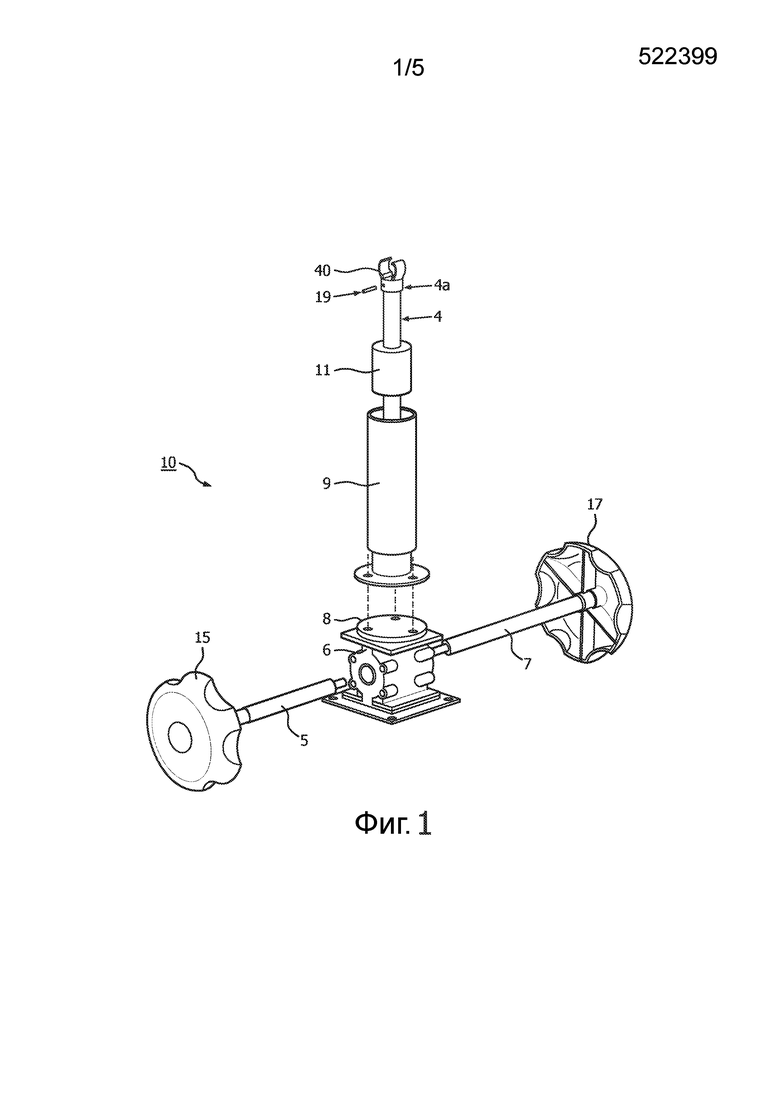
[17] Фиг. 1 иллюстрирует изображение в разобранном виде различных составных элементов системы 10 наклона для наклона в соответствии с одним или более вариантами осуществления на вертикальном изображении в разобранном виде. Система 10 наклона содержит один или более из первого исполнительного механизма 15, второго исполнительного механизма 17, корпуса 9, опорного элемента 4, первого стержня 5, второго стержня 7, редуктора 6, установочной пластины 8, гайки 11, фиксирующего штифта 19, проушины 40 и/или других составных элементов.
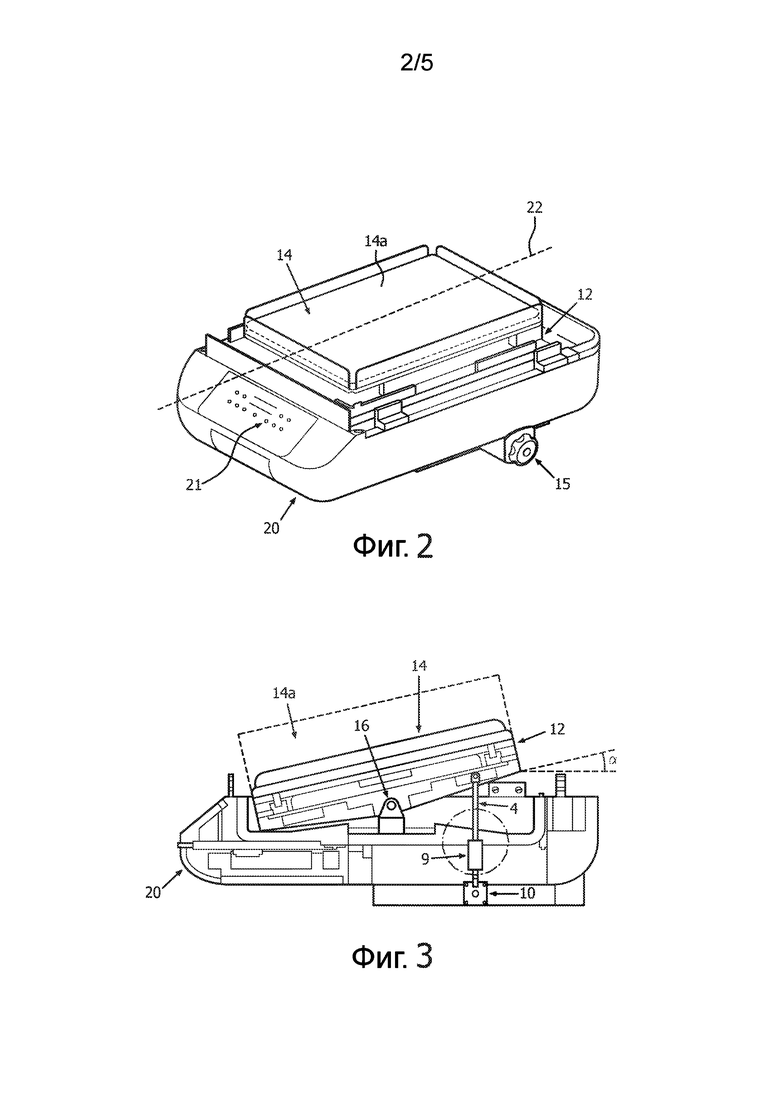
[18] Как проиллюстрировано на фиг. 3, система 10 наклона может быть интегрирована с медицинским устройством 20 для ухода за детьми, например, инкубатором или устройством обогрева ребенка. Медицинское устройство 20 для ухода за детьми и/или система 10 наклона может содержать одно или более из платформы 12 наклона, поддерживающего ребенка устройства 14 и/или других составных элементов. Как используется для целей данного раскрытия, термин "ребенок" может относиться к ребенку в возрасте до месяца, ребенку, только что рожденному ребенку, младенцу и/или другим терминам для пациента, достаточно маленького для помещения в инкубатор или устройство обогрева ребенка. Платформа 12 наклона выполнена с возможностью наклона вокруг оси 16 наклона, реагирующей на регулирование положения опорного элемента 4. Например, отрегулированным положением может быть продольное положение. Поддерживающее ребенка устройство 14 может содержать одно или более из кровати, матраса, подушки, одеяла и/или другой подходящей конструкции для поддержки ребенка. Платформа 12 наклона расположена под поддерживающим ребенка устройством 14 таким образом, что наклон платформы 12 наклона, соответственно, наклоняет поддерживающее ребенка устройство 14. Под платформой 12 наклона расположен корпус 9. Медицинское устройство 20 для ухода за детьми и/или поддерживающее ребенка устройство 14 содержат область 14a, которой может быть терморегулируемая область, стерильная область и/или область, внутри которой предполагается сохранение подходящей среды для пользы ребенка. Данная подходящая среда может упоминаться, как микросреда для инкубаторов и как макросреда для устройств для обогрева детей. Область 14a может охватывать трехмерную область или объем. Факторы окружающей среды могут включать температуру, приток воздуха, газовый состав около ребенка, влажность, условия освещения, защиту от патогенных организмов, вредных частиц и/или заражения. Например, в некоторых вариантах осуществления система 10 наклона может быть интегрирована в инкубатор таким образом, что терморегулируемая область может содержать область, объем и/или огороженное место, окруженное колпаком инкубатора, и/или область под платформой 12 наклона. Благодаря тому, что система 10 наклона является компактной, работа системы 10 наклона может оказывать небольшое или незначительное влияние на терморегуляцию внутри области 14a, в отличие от существующих систем наклона. Дополнительно, благодаря компактности и размещению относительно медицинского устройства 20 для ухода за детьми, использование системы 10 наклона, которая описана в данном документе, допускает светотерапию со стороны обращенной вниз поверхности, которая может применяться для лечения гипербилирубинемии. Как используется в данном документе, "обращенная вниз поверхность" может относиться к поверхности поддерживающего ребенка устройства 14, например, устройства обогрева ребенка.
[19] Со ссылкой на фиг. 1, регулирование (продольного) положения опорного элемента 4 инициируется, когда первый исполнительный механизм 15 и/или второй исполнительный механизм 17 получают воздействие. В некоторых вариантах осуществления первый исполнительный механизм 15 и/или второй исполнительный механизм 17 может быть реализован в виде ручек, способных принимать воздействие, например, в виде вращательного движения, со стороны, например, осуществляющего уход лица. Воздействие первого исполнительного механизма 15 и/или второго исполнительного механизма 17 может передаваться и/или преобразовываться в регулирование положения опорного элемента 4 относительно корпуса 9. Опорный элемент 4 поддерживается, например, механически, с помощью корпуса 9, например, таким образом, что опорный элемент 4 проходит через корпус 9. В некоторых вариантах осуществления опорным элементом 4 является ходовой винт. Предусматриваются другие (механические) соединения между корпусом 9 и опорным элементом 4. Опорный элемент 4 может содержать дистальный конец 4a, который обеспечивает опору для платформы наклона для сохранения ориентации при вращении вокруг оси наклона. Опорный элемент 4 может удерживаться с помощью корпуса 9 таким образом, что продольное положение опорного элемента 4 относительно корпуса 9 регулируется в продольном направлении. Регулирование положения опорного элемента 4 регулирует ориентацию платформы наклона при вращении вокруг ее оси наклона.
[20] В некоторых вариантах осуществления первый исполнительный механизм 15 может быть соединен через стержень 5 с редуктором 6 таким образом, что воздействие, принимаемое первым исполнительным механизмом 15, передается и/или преобразуется через стержень 5 в движение внутри редуктора 6, а в дальнейшем передается и/или преобразуется в движение установочной пластины 8, которая соединена с редуктором 6. В качестве альтернативы и/или одновременно второй исполнительный механизм 17 может быть соединен через стержень 7 с редуктором 6 таким образом, что воздействие, принимаемое вторым исполнительным механизмом 17, передается и/или преобразуется через стержень 7 в движение внутри редуктора 6, а в дальнейшем передается и/или преобразуется в движение установочной пластины 8, которая соединена с редуктором 6. Редуктор 6 может, например, относиться к коническому редуктору T типа. Соединениями, включающими в себя редуктор 6, могут быть механические соединения. В некоторых вариантах осуществления система 10 наклона может содержать два исполнительных механизма, которые соединены с одной и той же штангой. Движением установочной пластины 8 может быть вращательное движение. Корпус 9 может быть соединен с редуктором 6 через установочную пластину 8 таким образом, что вращательное движение установочной пластины 8 может передаваться и/или преобразовываться во вращательное движение корпуса 9. Гайка 11 может быть закреплена внутри и/или объединена с корпусом 9 таким образом, что движение корпуса 9 передается и/или преобразуется в регулирование положения, например, продольного положения, опорного элемента 4 посредством сочетания резьбы между гайкой 11 и опорным элементом 4. В некоторых вариантах осуществления, не показанных на фиг. 1, движение установочной пластины 8 может передаваться и/или преобразовываться во вращательное движение опорного элемента 4 вместо невращательного движения. Гайку 11 нельзя легко увидеть вне изображения в разобранном виде системы 10 наклона. Опорный элемент 4 может передвигаться поступательно, например, передвигаться без углового смещения, например как поступательно перемещающийся винт. В качестве альтернативы и/или одновременно опорный элемент 4 может быть не вращающимся. Опорным элементом 4 может быть трапециевидный винт. Различные варианты осуществления опорного элемента 4 могут быть объединены, например, опорным элементом 4 может быть не вращающийся поступательно, перемещающийся трапециевидный ходовой винт.
[21] Фиг. 2 иллюстрирует изометрическое изображение медицинского устройства 20 для ухода за детьми и поддерживающего ребенка устройства 14 в соответствии с одним или более вариантами осуществления. Ребенок может помещаться и/или поддерживаться поддерживающим ребенка устройством 14 таким образом, что областью 14a может быть терморегулируемая область, стерильная область и/или область, внутри которой предполагается сохранение подходящей среды для пользы ребенка. Платформа 12 наклона может иметь центральную ось 22, которая разделяет платформу 12 наклона на левую половину и правую половину. Центральная ось 22 может быть частью центральной плоскости, которая разделяет медицинское устройство 20 для ухода за детьми и поддерживающее ребенка устройство 14 на левую половину и правую половину. Медицинское устройство 20 для ухода за детьми может содержать панель 21 управления, которая может, например, быть выполнена с возможностью регулирования температуры и/или других факторов подходящей среды области 14a. Первый исполнительный механизм 15 расположен за пределами области 14a и принимает воздействие за пределами области 14a, как и второй исполнительный механизм, аналогичный второму исполнительному механизму 17 фиг. 1, причем второй исполнительный механизм скрыт из поля зрения на фиг. 2.
[22] Объединяя примеры, показанные на фиг. 1 и фиг. 2, первый исполнительный механизм 15 и второй исполнительный механизм 17 расположены на противоположных сторонах относительно поддерживающего ребенка устройства 14 таким образом, что, например, лицо, осуществляющее уход, может удобно наклонять платформу 12 наклона с каждой стороны поддерживающего ребенка устройства 14, сохраняя в то же время целостность среды области 14a. Удобно, что система 10 наклона позволяет регулирование одной рукой на угол наклона платформы 12 наклона.
[23] Объединяя примеры, показанные на фиг. 1, фиг. 2 и фиг. 3, опорный элемент 4 может быть смещен с предварительно заданным смещением относительно центра от центральной оси 22. Предварительно заданное смещение от центра может составлять приблизительно 50 мм, приблизительно 60 мм, приблизительно 70 мм, приблизительно 80 мм, приблизительно 90 мм, приблизительно 100 мм, приблизительно 110 мм, приблизительно 120 мм, по меньшей мере 80 мм, по меньшей мере 100 мм, по меньшей мере 120 мм и/или другое подходящее расстояние таким образом, что опорный элемент 4 предоставляет возможность и/или не прерывает светотерапию со стороны обращенной вниз поверхности для пациента 106 и/или (рентгеновскую) фотосъемку области по центральной оси 22 или около нее. В качестве альтернативы и/или одновременно опорный элемент 4 может быть смещен с предварительно заданным осевым смещением от оси 16 наклона. Предварительно заданное осевое смещение может составлять приблизительно 150 мм, приблизительно 160 мм, приблизительно 170 мм, приблизительно 180 мм, приблизительно 190 мм, приблизительно 200 мм, приблизительно 210 мм, приблизительно 220 мм, по меньшей мере 180 мм, по меньшей мере 190 мм, по меньшей мере 200 мм, по меньшей мере 220 мм и/или другое подходящее расстояние таким образом, что опорный элемент 4 предоставляет возможность и/или не прерывает светотерапию со стороны обращенной вниз поверхности для пациента 106 и/или (рентгеновскую) фотосъемку области по центральной оси 22 или около нее. Например, известные устройства, которые обеспечивают светотерапию со стороны обращенной вниз поверхности, могут колебаться по длине от приблизительно 50 см до приблизительно 75 см, по ширине от приблизительно 28 см до приблизительно 44 см и по высоте от приблизительно 11 см до приблизительно 16 см. В то время как будущие устройства, которые обеспечивают светотерапию со стороны обращенной вниз поверхности, могут быть более компактными, чем известные устройства, использующие опорный элемент 4, осевое смещение от оси 16 наклона и/или смещение относительно центра от центральной оси 22 будет обеспечивать (более хорошую) светотерапию со стороны обращенной вниз поверхности по сравнению с использованием механизма наклона, который расположен по центру под платформой наклона, поддерживающим ребенка устройством и/или медицинским устройством для ухода за детьми. В некоторых вариантах осуществления системы 10 наклона, такой как может использоваться с некоторыми обычными типами устройств обогрева детей, расположенный по центру опорный элемент 4, например, на центральной оси 22 или около нее и/или на расположенной по центру оси 16 наклона или около нее, не будет оставлять достаточно пространства для обеспечения светотерапии со стороны обращенной вниз поверхности по меньшей мере для некоторых из описанных известных устройств.
[24] В некоторых вариантах осуществления ось 6 наклона может быть расположена на одном конце платформы 12 наклона или около него. В подобных случаях опорный элемент 4 может быть смещен на противоположный конец платформы 12 наклона или около него, с предварительно заданным осевым смещением, составляющим приблизительно 300 мм, приблизительно 325 мм, приблизительно 350 мм, приблизительно 375 мм, приблизительно 400 мм, приблизительно 450 мм и/или другое подходящее расстояние таким образом, что предоставляется возможность применения светотерапии со стороны обращенной вниз поверхности, например, для устройства обогрева ребенка.
[25] Со ссылкой на фиг. 3 опорный элемент 4, который изображен, полностью выдвинут вверх и за пределы корпуса 9 таким образом, что угол α наклона платформы 12 наклона в настоящее время находится на своем положительном максимальном значении внутри диапазона углов, ограниченных для работы системы 10 наклона. В различных вариантах осуществления диапазон углов может составлять от приблизительно -30 градусов до приблизительно +30 градусов, от приблизительно -20 градусов до приблизительно +20 градусов, от приблизительно -15 градусов до приблизительно +15 градусов, от приблизительно -12 градусов до приблизительно +12 градусов, от приблизительно -10 градусов до приблизительно +10 градусов и/или другой диапазон градусов, подходящих для достижения одного или более конкретных преимуществ для детей во время использования. Диапазон углов может быть ассиметричным вокруг нуля градусов. Диапазон углов, вместе с расстоянием между опорным элементом 4 и осью 16 наклона, являются факторами, которые влияют на требуемую длину опорного элемента 4.
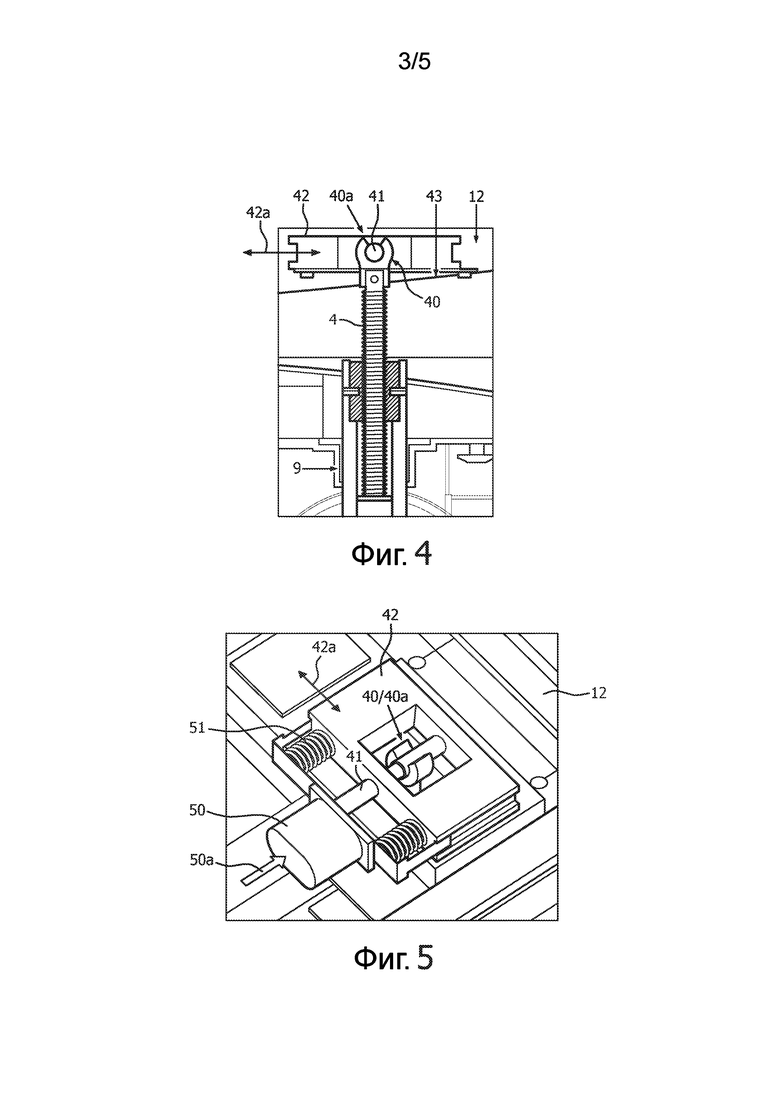
[26] Со ссылкой на фиг. 1 система 10 наклона может содержать проушину 40, механически соединенную с дистальным концом 4a опорного элемента 4, например, посредством фиксирующего штифта 19. Опорный элемент 4 может быть механически соединен с платформой наклона и/или ее составным элементом посредством поворотного пальца, который соответствует проушине 40. Так как положение опорного элемента 4 относительно корпуса 9 регулируется, например, в продольном направлении без углового смещения, точка сцепления с платформой наклона передвигается относительно платформы наклона горизонтально и/или в боковом направлении. В качестве иллюстрации фиг. 4 иллюстрирует различные составные элементы, которые могут использоваться для соединения, например, механически, опорного элемента 4 с платформой 12 наклона и приспосабливания к передвижению точки сцепления с платформой 12 наклона. В частности, проушина 40 механически зацепляет поворотный палец 41. Проушина 40 и поворотный палец 41 образуют один предусмотренный вариант ручного устройства соединения или устройства отсоединения, поскольку палец 41 может быть отцеплен от проушины 40 без применения орудия или инструмента. Поворотный палец 41 удерживается внутри или иным образом соединен с горизонтально передвигаемым направляющим блоком 42, который может передвигаться в направлении 42a относительно положения внутри платформы 12 наклона. В некоторых вариантах осуществления горизонтально передвигаемый направляющий блок 42 удерживается внутри полости, камеры и/или другого подходящего огороженного места платформы 12 наклона с помощью неподвижной стопорной пластины 43. Так как опорный элемент 4 передвигается, например, вверх и за пределы корпуса 9, регулирование ориентации платформы наклона при вращении 12 вынуждает передвижение вдоль направления 42a горизонтально передвигаемого направляющего блока 42. В некоторых вариантах осуществления поворотный палец может быть соединен с дистальным концом опорного элемента 4, а состыкованная проушина может удерживаться внутри направляющего блока, соединенного и/или удерживаемого внутри платформы наклона, аналогичной платформе 12 наклона.
[27] Со ссылкой на фиг. 1 в некоторых вариантах осуществления опорный элемент 4 выполнен таким образом, что система 10 наклона жестко фиксируется с некоторыми, большинством или во всех углах наклона внутри диапазона углов наклона, образованных для работы системы 10 наклона, в соответствии с одним или более конкретными коэффициентами трения опорного элемента 4 с гайкой 11 и/или корпусом 9, максимальной длиной передвижения опорного элемента 4 во время использования, средним диаметром опорного элемента 4, предварительно заданным количеством оборотов опорного элемента 4 для полного регулирования наклона платформы 12 наклона, максимальной массой, давящей вниз на опорный элемент 4, и/или другими соображениями, которые могли бы влиять на жестко блокируемый опорный элемент 4 таким образом, чтобы опорный элемент 4 не дал задний ход. Блокировка, таким образом, может упоминаться, как самоблокировка. В некоторых вариантах осуществления самоблокируемая система наклона может не требовать внешнего и/или дополнительного тормозного механизма во время работы. Примеры внешних и/или дополнительных тормозных механизмов включают тормозные накладки, подпружиненные тормоза, блокируемые газовые пружины, индексное блокирование и/или другие тормозные механизмы. В предпочтительном варианте осуществления угол наклона винтовой линии опорного элемента 4 колеблется между приблизительно 6 и приблизительно 9 градусами, между приблизительно 7 и приблизительно 8 градусами и/или в пределах другого диапазона, подходящего для жесткой фиксации, как описано в данном документе. Предварительно заданное количество оборотов, необходимое для осуществления полного наклона, равного +12 градусов, может колебаться между приблизительно 6 и приблизительно 9 оборотами, между приблизительно 8 и приблизительно 10 оборотами, между приблизительно 9 и приблизительно 11 оборотами и/или в пределах другого подходящего диапазона оборотов. В некоторых вариантах осуществления регулировка передаточного отношения редуктора 6, например до соотношения 1:2, может требовать меньше оборотов.
[28] Максимальная длина передвижения опорного элемента 4 зависит от предварительно заданного расстояния между точкой сцепления опорного элемента 4 с платформой 12 наклона и осью 16 наклона, а также требуемого диапазона углов наклона и/или других соображений. Расстояние между точкой сцепления опорного элемента 4 с платформой 12 наклона и осью 16 наклона может составлять приблизительно 160 мм, приблизительно 180 мм, приблизительно 190 мм, приблизительно 200 мм, приблизительно 220 мм, между приблизительно 170 мм и приблизительно 200 мм, между приблизительно 190 мм и приблизительно 210 мм и/или другие подходящие расстояния для расположенной по центру оси 16 наклона, или двойное подобное расстояние для вариантов осуществления, в которых ось 16 наклона расположена на противоположном от опорного элемента 4 конце платформы 12 наклона. Максимальная длина передвижения опорного элемента 4 во время использования с ограниченным диапазоном углов может составлять приблизительно 80 мм, приблизительно 90 мм, приблизительно 100 мм, приблизительно 120 мм, между приблизительно 80 мм и приблизительно 110 мм, между приблизительно 90 мм и приблизительно 130 мм и/или другой подходящий диапазон для максимальной длины передвижения опорного элемента 4 для расположенной по центру оси 16 наклона, или двойную подобную длину для вариантов осуществления, в которых ось 16 наклона расположена на противоположном от опорного элемента 4 конце платформы 12 наклона. Шаг опорного элемента 4 может составлять приблизительно 5 мм, приблизительно 6 мм, приблизительно 7 мм, приблизительно 8 мм и/или другой подходящий шаг для самоблокировки. Средний диаметр опорного элемента 4 может составлять приблизительно 12 мм, приблизительно 14 мм, приблизительно 15 мм, приблизительно 16 мм, приблизительно 18 мм, между приблизительно 12 мм и приблизительно 14 мм и/или другой подходящий диаметр. Коэффициент трения, который также может упоминаться как u, опорного элемента 4 может составлять приблизительно 0,08, приблизительно 0,1, приблизительно 0,12, приблизительно 0,14 и/или другой подходящий коэффициент трения. В предпочтительном варианте осуществления опорный элемент 4 может иметь диаметр, составляющий приблизительно 13 мм, шаг, составляющий приблизительно 5 мм, коэффициент трения, составляющий приблизительно 0,13, максимальный наклон, составляющий 12 градусов, и длину передвижения, составляющую приблизительно 90 мм. Более низкий коэффициент трения, например, приблизительно 0,1, может быть компенсирован различными способами, в том числе с использованием опорного элемента 4, имеющего шаг, составляющий приблизительно 4 мм, для сохранения самоблокировки. Максимальная масса, давящая вниз на опорный элемент 4 во время нормальной работы системы 10 наклона, может составлять приблизительно 10 фунтов, приблизительно 15 фунтов, приблизительно 20 фунтов, приблизительно 25 фунтов, приблизительно 30 фунтов, между приблизительно 15 фунтов и 25 фунтов и/или другой подходящий предел массы, который включает платформу наклона, все или некоторые поддерживающие ребенка устройства, одного или более детей и/или другие объекты/составные элементы. Для легкого использования максимальный крутящий момент, необходимый для рабочей системы 10 наклона посредством первого исполнительного механизма 15 или второго исполнительного механизма 17, может составлять приблизительно 0,1 Нм, приблизительно 0,2 Нм, приблизительно 0,3 Нм, приблизительно 0,4 Нм, приблизительно 0,5 Нм и/или другую подходящую величину крутящего момента для (ручной) работы.
[29] В некоторых вариантах осуществления система наклона может иметь привод от двигателя, например, управляемого через панель 21 управления. В подобных случаях максимальный крутящий момент, необходимый для ручной работы, может не учитываться для легкости применения.
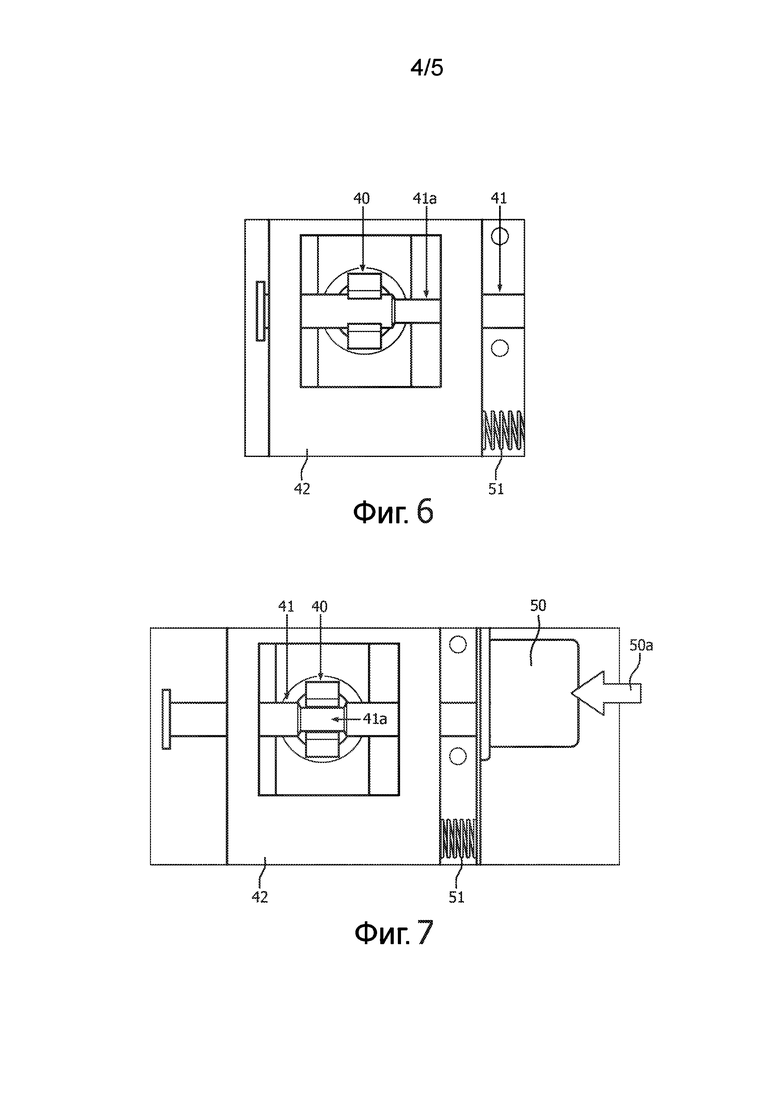
[30] Фиг. 5-7 иллюстрируют различные составные элементы, связанные с механизмом расцепления для отсоединения платформы 12 наклона от опорного элемента 4. Со ссылкой на фиг. 5 проушина 40 может содержать открытый конец 40a. Со ссылкой на фиг. 6 поворотный палец 41 может содержать сегмент 41a, имеющий уменьшенный диаметр. Со ссылкой на фиг. 7 поворотный палец 41 может быть механически соединен, например, посредством одной или более пружин 51, с исполнительным механизмом 50 высвобождения таким образом, чтобы исполнительный механизм 50 высвобождения мог передвигаться в направлении 50a. Передвижение исполнительного механизма 50 высвобождения, соответственно, передвигает поворотный палец 41 таким образом, что сегмент 41a поворотного пальца 41 может быть выровнен с открытым концом 40a проушины 40. В ответ на подобное выравнивание проушина 40 может быть механически отсоединена от платформы 12 наклона, например, за счет подъема платформы 12 наклона вручную. Как изображено на фиг. 6, во время нормальной операции наклона сегмент 41a и открытый конец 40a могут быть не выровнены. Как изображено на фиг. 7, при получении воздействия от исполнительного механизма 50 высвобождения сегмент 41a и открытый конец 40a могут выравниваться для обеспечения отсоединения, как описано выше. Легкий доступ к системе 10 наклона и/или любому из его составных элементов может быть необходим для дезинфекции, мойки и/или обслуживания для того, чтобы обеспечить надлежащую работу.
[31] Фиг. 8 иллюстрирует способ 800 поддержки ребенка внутри терморегулируемой области поддерживающего ребенка устройства с использованием системы наклона, имеющей платформу наклона, расположенную под поддерживающим ребенка устройством, которое наклоняется вокруг оси наклона, первый исполнительный механизм, второй исполнительный механизм, корпус, расположенный под платформой наклона, и опорный элемент. Рабочий процесс способа 800, представленный ниже, предназначен для пояснения. В некоторых вариантах осуществления способ 800 может осуществляться с одной или более дополнительными операциями, не описанными, и/или без одной или более обсуждавшихся операций. Дополнительно порядок, в котором операции способа 800 проиллюстрированы на фиг. 8 и описаны ниже, не предназначен для ограничения.
[32] В некоторых вариантах осуществления способ 800 может осуществляться с использованием одного или более устройств обработки (например, цифрового процессора, аналогового процессора, цифровой схемы, предназначенной для обработки информации, аналоговой схемы, предназначенной для обработки информации, конечного автомата и/или других механизмов для электронной обработки информации). Одно или более устройств обработки может включать одно или более устройств, выполняющих некоторые или все операции способа 800 в ответ на команды, сохраненные электронным образом на электронном носителе информации. Одно или более устройств обработки может включать одно или более устройств, выполненных посредством аппаратного обеспечения, аппаратно-программного обеспечения и/или программного обеспечения, предназначенных конкретно для выполнения одной или более операций способа 800.
[33] Во время операции 806 корпус удерживает опорный элемент таким образом, что положение опорного элемента относительно корпуса является регулируемым, при этом регулирование положения опорного элемента относительно корпуса регулирует ориентацию платформы наклона при вращении вокруг оси наклона. В некоторых вариантах осуществления операция 806 выполняется с помощью корпуса и гайки, таких же или аналогичных корпусу 9 и гайке 11 (показанных на фиг. 1 и описанных в данном документе).
[34] Во время операции 808 опору для платформы наклона обеспечивают за счет опорного элемента для сохранения ориентации платформы наклона при вращении вокруг оси наклона. В некоторых вариантах осуществления операция 808 выполняется за счет опорного элемента, такого же или аналогичного опорному элементу 4 (показанному на фиг. 1 и описанному в данном документе).
[35] Во время операции 810 воздействие получают посредством одного или обоих из первого исполнительного механизма, расположенного на первой стороне относительно поддерживающего ребенка устройства, и/или второго исполнительного механизма, расположенного на второй стороне относительно поддерживающего ребенка устройства, при этом воздействие регулирует положение опорного элемента относительно корпуса, регулируя тем самым ориентацию платформы наклона при вращении, при этом воздействие получают за пределами терморегулируемой области поддерживающего ребенка устройства, и при этом вторая сторона находится напротив первой стороны. В некоторых вариантах осуществления операция 810 выполняется первым исполнительным механизмом или вторым исполнительным механизмом, таким же или аналогичным первому исполнительному механизму 15 или второму исполнительному механизму 17 (показанному на фиг. 1 и описанному в данном документе).
[36] В формуле изобретения любые ссылочные обозначения, помещенные в скобки, не должны рассматриваться как ограничение пункта. Слово "содержащий" или "включающий" не исключает наличие элементов или стадий, отличающихся от элементов или стадий, перечисленных в пункте. В пункте устройства с перечислением нескольких средств несколько данных средств может быть реализовано с помощью одного и того же пункта аппаратного обеспечения. Артикль "a" или "an", предшествующий элементу, не исключает наличия множества подобных элементов. В любом пункте устройства с перечислением нескольких средств несколько данных средств может быть реализовано с помощью одного и того же пункта аппаратного обеспечения. Сам факт, что определенные элементы перечислены во взаимно отличающихся зависимых пунктах, не означает, что данные элементы не могут быть использованы в комбинации.
[37] Несмотря на то, что изобретение было подробно описано с целью объяснения на основании того, что в настоящее время считается наиболее практичными и предпочтительными вариантами осуществления, следует понимать, что подобная детализация предназначена исключительно для данной цели и что изобретение не ограничено раскрытыми вариантами осуществления, но наоборот предназначено для охвата модификаций и эквивалентных конфигураций, которые попадают в пределы сущности и объема правовых притязаний приложенной формулы изобретения. Например, должно быть понятно, что представленное изобретение предусматривает, что до возможной степени один или более признаков любого варианта осуществления могут быть объединены с одним или более признаками любого другого варианта осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ НАКЛОНА С ПРЯМЫМ ПРИВОДОМ ДЛЯ МЕДИЦИНСКИХ УСТРОЙСТВ ДЛЯ УХОДА ЗА ДЕТЬМИ РАННЕГО ВОЗРАСТА | 2013 |
|
RU2640565C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ УГЛА НАКЛОНА МЕДИЦИНСКОГО УСТРОЙСТВА ДЛЯ УХОДА ЗА ДЕТЬМИ РАННЕГО ВОЗРАСТА | 2013 |
|
RU2655268C2 |
| УСТРОЙСТВО ДЛЯ РЕЗАНИЯ ГОРНОЙ ПОРОДЫ | 2017 |
|
RU2754529C2 |
| МАШИНА, НЕСУЩАЯ РЕЖУЩЕЕ ГОРНУЮ ПОРОДУ УСТРОЙСТВО | 2017 |
|
RU2753485C2 |
| КОМПОНОВКА ДЛЯ РАСШИРЕНИЯ СТВОЛА ШАХТЫ ДЛЯ БУРОВОЙ СИСТЕМЫ | 2017 |
|
RU2795402C2 |
| КОЛЯСОЧНОЕ ПРИСТАВНОЕ УСТРОЙСТВО И УЗЕЛ СДВОЕННОЙ ДЕТСКОЙ КОЛЯСКИ | 2020 |
|
RU2788593C2 |
| СИСТЕМА РАЗГРУЗКИ И СПОСОБ РАЗГРУЗКИ ТРАНСПОРТНОЙ ТЕЛЕЖКИ ДЛЯ ПРОТЕКТОРОВ ШИН | 2015 |
|
RU2656465C2 |
| УСТРОЙСТВО ДЛЯ СООБЩЕНИЯ ДВИЖЕНИЯ | 1998 |
|
RU2244961C2 |
| РЕЖУЩЕЕ УСТРОЙСТВО И ОПОРА ДЛЯ НЕГО | 2017 |
|
RU2752854C2 |
| УЗЕЛ СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА, СИДЕНЬЕ АВТОМОБИЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТАНОВОЧНЫЙ УЗЕЛ ДЛЯ ПОДУШКИ СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2682140C2 |
Группа изобретений относится к медицинской технике. Система и способ наклона поддерживающего ребенка устройства приводится в действие двумя исполнительными механизмами, которые расположены за пределами терморегулируемой и/или стерильной области поддерживающего ребенка устройства. Система содержит платформу наклона, корпус, опорный элемент, а также вышеупомянутые первый и второй исполнительные механизмы. Группа изобретений позволяет сохранить целостность окружающей среды вокруг ребенка во время регулировок угла наклона устройства, поддерживающего ребенка. 3 н. и 12 з.п. ф-лы, 8 ил.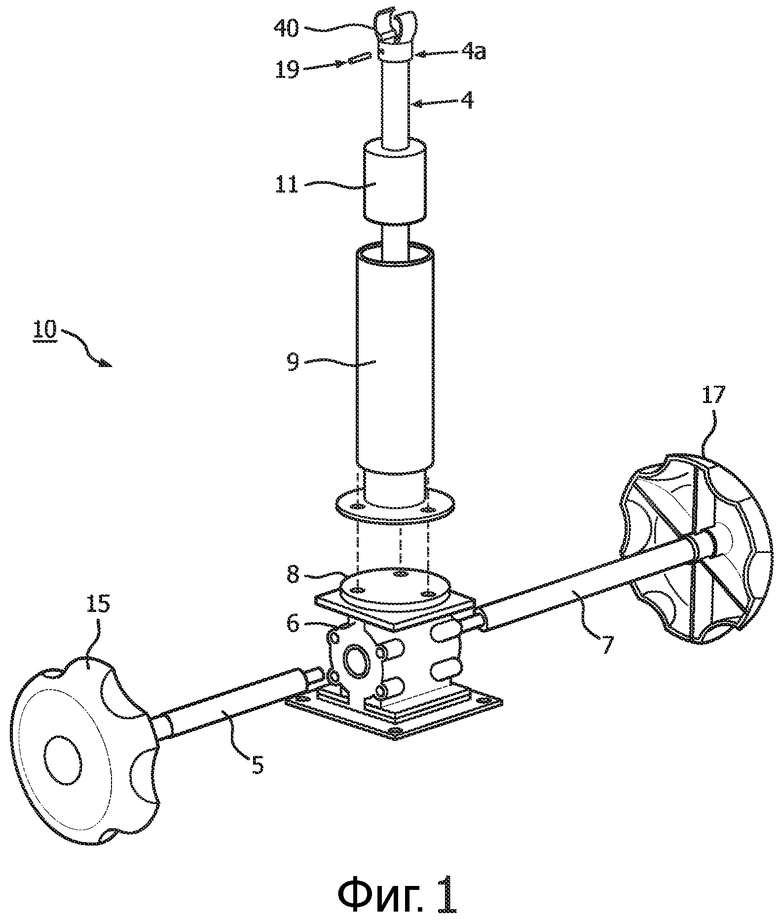
1. Система (10) для наклона поддерживающего ребенка устройства, имеющего терморегулируемую область, при этом система содержит:
платформу (12) наклона, выполненную с возможностью расположения под поддерживающим ребенка устройством (14), при этом платформа наклона выполнена с возможностью наклона вокруг оси (16) наклона;
корпус (9), расположенный под платформой наклона;
опорный элемент (4), при этом опорный элемент обеспечивает опору для платформы наклона для сохранения ориентации платформы наклона при вращении вокруг оси наклона, при этом корпус удерживает опорный элемент таким образом, что положение опорного элемента относительно корпуса является регулируемым, при этом положение опорного элемента регулируется в вертикальном направлении и при этом регулирование положения опорного элемента относительно корпуса регулирует ориентацию платформы наклона при вращении вокруг оси наклона;
первый исполнительный механизм (15), расположенный на первой стороне относительно поддерживающего ребенка устройства, при этом первый исполнительный механизм выполнен с возможностью регулирования положения опорного элемента относительно корпуса, регулируя тем самым ориентацию платформы наклона при вращении, и при этом первый исполнительный механизм расположен и приводится в действие за пределами терморегулируемой области поддерживающего ребенка устройства; и
второй исполнительный механизм (17), расположенный на второй стороне относительно поддерживающего ребенка устройства, которая находится напротив первой стороны, при этом второй исполнительный механизм выполнен с возможностью регулирования положения опорного элемента относительно корпуса, регулируя тем самым ориентацию платформы наклона при вращении, и при этом второй исполнительный механизм расположен и приводится в действие за пределами терморегулируемой области поддерживающего ребенка устройства.
2. Система по п. 1, в которой платформа наклона выполнена с возможностью наклона в пределах первого диапазона углов, и при этом опорный элемент содержит ходовой винт, который имеет такой угол наклона винтовой линии, что платформа наклона самоблокируется в пределах первого диапазона углов.
3. Система по п. 1, в которой платформа наклона выполнена с возможностью наклона в пределах первого диапазона углов, при этом первый диапазон углов составляет от минус 30 градусов до плюс 30 градусов.
4. Система по п. 1, в которой ось наклона закреплена на своем месте.
5. Система по п. 1, в которой положение опорного элемента относительно корпуса регулируется без углового смещения опорного элемента.
6. Способ поддержки ребенка внутри терморегулируемой области поддерживающего ребенка устройства с использованием системы наклона, имеющей платформу наклона, расположенную под поддерживающим ребенка устройством, которая наклоняется вокруг оси наклона, первый исполнительный механизм, второй исполнительный механизм, корпус, расположенный под платформой наклона, и опорный элемент, при этом способ включает:
удерживание опорного элемента с помощью корпуса таким образом, что положение опорного элемента относительно корпуса является регулируемым, при этом положение опорного элемента регулируется в вертикальном направлении и при этом регулирование положения опорного элемента относительно корпуса регулирует ориентацию платформы наклона при вращении вокруг оси наклона;
предоставление опоры для платформы наклона за счет опорного элемента для сохранения ориентации платформы наклона при вращении вокруг оси наклона; и
получение воздействия посредством одного или обоих из первого исполнительного механизма, расположенного на первой стороне относительно поддерживающего ребенка устройства, и/или второго исполнительного механизма, расположенного на второй стороне относительно поддерживающего ребенка устройства, при
этом воздействие регулирует положение опорного элемента относительно корпуса, регулируя тем самым ориентацию платформы наклона при вращении, при этом воздействие получают за пределами терморегулируемой области поддерживающего ребенка устройства и при этом вторая сторона находится напротив первой стороны.
7. Способ по п. 6, в котором платформа наклона наклоняется в пределах первого диапазона углов, и при этом опорный элемент содержит ходовой винт, который имеет такой угол наклона винтовой линии, что платформа наклона самоблокируется в пределах первого диапазона углов.
8. Способ по п. 6, в котором первый диапазон углов составляет от минус 30 градусов до плюс 30 градусов.
9. Способ по п. 6, в котором ось наклона закреплена на своем месте.
10. Способ по п. 6, в котором положение опорного элемента относительно корпуса регулируется без углового смещения опорного элемента.
11. Система, выполненная с возможностью поддержки ребенка внутри терморегулируемой области поддерживающего ребенка устройства, при этом система содержит:
средство (12) наклона, расположенное под поддерживающим ребенка устройством для наклона поддерживающего ребенка устройства вокруг оси (16) наклона;
средство (4) подъема, имеющее положение относительно средства (9) размещения, которое находится под средством наклона, при этом положение средства подъема является регулируемым, при этом положение средства подъема регулируется в вертикальном направлении и при этом регулирование положения относительно средства размещения регулирует ориентацию при вращении средства наклона вокруг оси наклона;
средство (4, 4a) поддержки для предоставления опоры средству наклона для сохранения ориентации при вращении средства наклона вокруг оси наклона;
первое исполнительное средство (15), расположенное на первой стороне относительно поддерживающего ребенка устройства для получения воздействия, при этом воздействие на первое исполнительное средство регулирует положение средства подъема относительно средства размещения, регулируя тем самым ориентацию при вращении средства наклона, и при этом воздействие на первое исполнительное средство получают за пределами терморегулируемой области поддерживающего ребенка устройства; и
второе исполнительное средство (17), расположенное на второй стороне относительно поддерживающего ребенка устройства для получения воздействия, при этом воздействие на второе исполнительное средство регулирует положение средства подъема относительно средства размещения, регулируя тем самым ориентацию при вращении средства наклона, при этом воздействие на второе исполнительное средство получают за пределами терморегулируемой области поддерживающего ребенка устройства и при этом вторая сторона находится напротив первой стороны.
12. Система по п. 11, в которой средство наклона выполнено с возможностью наклона в пределах первого диапазона углов, и при этом средство подъема содержит ходовой винт, который имеет такой угол наклона винтовой линии, что средство наклона самоблокируется в пределах первого диапазона углов.
13. Система по п. 11, в которой средство наклона выполнено с возможностью наклона в пределах первого диапазона углов, и при этом первый диапазон углов составляет от минус 30 градусов до плюс 30 градусов.
14. Система по п. 11, в которой ось наклона закреплена на своем месте.
15. Система по п. 11, в которой положение средства подъема относительно средства размещения регулируется без углового смещения средства подъема.
| US 6071228 A, 06.06.2000 | |||
| US 2011130620 A1, 02.06.2011 | |||
| Измеритель коротких интервалов времени | 1977 |
|
SU711537A1 |
| Упрощенная система воздухокондиционирования для пассажирских вагонов | 1952 |
|
SU99967A1 |

